

Sigo modelando y construyendo robots. Ya escribí instrucciones para crear un control remoto modelos y robots. El control remoto se basa en el viejo joystick Sega. Este joystick tiene cuatro flechas y 8 botones, suficientes para controlar una máquina o un pequeño robot. La gestión se realizó mediante un LED IR. Hoy escribiré instrucciones para la modernización de este control remoto, es decir, la conversión de este en un control remoto Bluetooth. Dependiendo del módulo Bluetooth utilizado, el control remoto se conectará al dispositivo preprogramado o será posible conectarse al control remoto. Describiré ambas opciones. Necesitaremos:
- Joystick de Sega
- Arduino Pro Mini 3.3v 8MHz
- USB-TTL
- 2 baterías Ni-Mn 1.2v 1000mA
- Módulo Bluetooth HC-05 o HC-06
- LED rojo
- LED azul
- Resistencia 2x75Om, 2x5Om, 1x2Om
- Conector PLSx5 "madre"
- pegamento caliente
- cables
- Compartimento de batería 4xAAA
- Cables multicolores
- Soldador, soldadura, colofonia
- brazos rectos
Paso 1 Elegir un módulo Bluetooth
Se requieren dos módulos para la comunicación. Insertaremos uno en el control remoto y el segundo lo conectaremos a la máquina de escribir o el robot. Hay una gran cantidad de módulos Bluetooth. Se diferencian en funciones y protocolos de comunicación compatibles. Una lista de muestra de módulos que se encuentran:
- HC-03, HC-04 (HC-04-M, HC-04-S) en el chip BC417143;
- HC-05, HC-06 (HC-06-M, HC-06-S) en el chip BC417143;
- HC-05-D, HC-06-D;
- HC-07 - módulo con un chip CSR 41C6;
- HC-08 - módulo con consumo de energía ultra bajo y protocolo Bluetooth 4.0;
- HC-09 es el módulo más nuevo diseñado para reemplazar el HC-06 y HC-07.
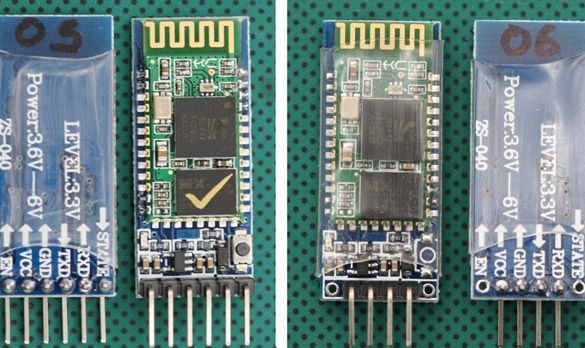
Me decidí por dos módulos HC-05 y HC-06, ya que son óptimos en términos de precio / funcionalidad. Admiten el protocolo de comunicación: especificación Bluetooth v2.0 + EDR. El alcance es de hasta 10 metros (nivel de potencia 2). Compatible con todos los adaptadores Bluetooth que admiten SPP. El volumen de la memoria flash (para almacenar firmware y configuraciones) es de 8 Mbit. Operan a la frecuencia de una señal de radio: 2.40 .. 2.48 GHz. La interfaz del host es USB 1.1 / 2.0 o UART. Tienen bajo consumo de energía: la corriente durante la comunicación es de 30-40 mA. El valor actual promedio es de aproximadamente 25 mA. Una vez establecida la conexión, la corriente consumida es de 8 mA. Estos módulos son fáciles de encontrar, son los más comunes. Los módulos son muy similares, pero la principal diferencia entre ellos es que el HC-05 puede funcionar tanto en modo maestro como en modo esclavo.HC-06 solo puede ser un esclavo. En pocas palabras, el HC-06 no puede detectar un dispositivo emparejado y establecer una conexión con él; solo puede obedecer al maestro. Los módulos se venden como dos placas soldadas juntas. El más pequeño es el módulo de fábrica. Grande: una placa especial para bricolaje. Parece una placa más pequeña con un chip BC417:

Y así, los módulos de bricolaje HC-05 y HC-06 mismos:
Puede comprar un módulo sin una placa de pruebas. Cuesta un poco más barato, pero luego tendrá que instalar un regulador de voltaje de 3.3 V para el módulo. Además, la distancia entre los contactos es pequeña y tendrá que atormentarse soldando al módulo de cable.
Para establecer la comunicación entre el control remoto y el robot o la máquina, debe configurar dos módulos Bluetooth uno encima del otro. En este caso, configuraremos el módulo HC-05 para que encuentre y se conecte al HC-06.
Paso 2 Configure el HC-06.
Primero necesita conectar el HC-06 a la computadora. Esto se puede hacer conectando el módulo a través de un adaptador USB-UART. En este caso, la conexión es la siguiente:
Bluetooth - USB-UART
TX - RX
RX - TX
VCC - +5
GND - GND
Si no tiene USB-UART a mano, puede escribir el siguiente boceto en cualquier placa Arduino:
Conéctese de la siguiente manera:
Bluetooth - Arduino
TX - pin 2
RX - pin 3
VCC - +5
GND - GND
Luego abrimos cualquier programa de terminal, seleccionamos el puerto de comunicación al que está conectado el HC-06, la velocidad predeterminada es 9600, NL y CR no son necesarios. Si no se establece una conexión Bluetooth con el HC-06, el módulo está en el modo de ingresar comandos AT. Si el módulo no responde, intente sobrecargarlo desconectando el cable positivo y volviendo a conectarlo. E ingrese los siguientes comandos:
"AT": sin comillas, debe aparecer la respuesta "OK".
"AT + ADDR" - con este comando descubriremos la dirección única de HC-06, escriba esta dirección
"AT + BAUD7" - establece la velocidad en 57600
"AT + RESET" - sobrecargamos el módulo
No es necesario ingresar los siguientes comandos, pero en caso de que sea mejor conocerlos:
"AT + NAME
"AT + ORGL": restablecer el módulo a la configuración de fábrica
Esto completa la configuración del HC-06.
Paso 3 Configure HC-05.
Conectamos el módulo de manera similar a HC-06. Luego, abra cualquier programa de terminal, seleccione el puerto com en el que se cuelga USB-UART o Arduino, la velocidad de comunicación predeterminada de fábrica es 9600, pero también me reuní a una velocidad de 38400, si no lo cambió, seleccione 9600, no puede conectarse y cámbielo a 38400. Además Vale la pena incluir los parámetros NL y CR. Para transferir el modo de entrada de comando AT, debe presionar el botón en la placa HC-05 y luego ingresar lo siguiente:
"AT" - ingresado sin comillas, debe aparecer la respuesta "OK". Si vienes, seguimos ingresando comandos más.
“AT + ROLE = 1”: con este comando establecemos el rol del módulo con el dígito:
0 - esclavo, 1 - maestro, 2 - esclavo en el ciclo *. Debería obtener la respuesta "+ PAPEL: 1 \ r \ n" u "OK"
“AT + CMODE = 0”: el módulo en el rol del maestro está conectado solo al dispositivo Bluetooth cuya dirección se indica mediante el comando “AT + BIND”.
“AT + BIND: 1234,56,123456”: para establecer una conexión con su HC-06, debe ingresar su dirección aquí. Después de ingresar todos los comandos, el módulo tiene el rol de maestro (ROLE = 1) y se establece el modo de conexión a la dirección fija (CMODE = 0), se conectará solo al dispositivo Bluetooth cuya dirección se especifica mediante este comando. Se ingresan partes de la dirección: durante la instalación, separadas por una coma, y cuando se responde, a través de dos puntos. Obtendrá la respuesta: "+ BIND: 1234: 56: 789ABC \ r \ n" u "OK"
“AT + UART = 57600,0,0” - establezca la velocidad en 57600 bps, el bit de parada está representado por el número: 0 - uno, la verificación está representada por el número: 0 - sin verificación
Si está confundido acerca de la configuración del módulo o deja de funcionar correctamente, intente con el siguiente comando:
“AT + ORGL”: el módulo restablece las siguientes configuraciones CLASE = 0, IAC = 9e8b33, ROLE = 0, CMODE = 0, UART = 38400,0,0, PSWD = 1234, NAME = hc01.com.
Y luego vuelva a configurar los ajustes que necesita.
De esta manera, hemos creado un fuerte vínculo entre HC-05 y HC-06. Cuando los módulos HC-05 están encendidos, establecerá una conexión con el HC-06. Por experiencia personal, puedo decir que es mejor encender primero el HC-05 y luego el HC-06. Si se pierde la conexión, debe sobrecargar ambos módulos.
Paso 4 Preparación del control remoto.
Este paso se describe en detalle en las instrucciones anteriores en:
https://esm.imdmyself.com/8626-ik-pult-iz-dzhoystika-ot-sega.html
Es necesario realizar los pasos 1 a 4. Soldar el diodo IR es opcional, aunque no interferirá.
Paso 5 Conexión de un módulo Bluetooth.
Le aconsejo que instale HC-06 en el control remoto. Dado que para cambiar la configuración del módulo, solo necesita completar el boceto correspondiente en el Arduino Pro Mini. En el caso del HC-05, tendrá que desmontar el control remoto para presionar el botón para cambiar al modo de comando AT.Conectamos todo de acuerdo con el siguiente esquema
Joystick - Arduino
Flecha arriba - pin 2
Flecha hacia abajo - pin 4
Flecha izquierda - pin 5
Flecha derecha - pin 6
Botón A - pin 8
Botón B - pin 10
Botón C - pin 7
Botón X - pin 12
Botón Y - pin 11
Botón Z - pin 9
Botón de inicio - pin 14 (A0)
Botón de reinicio - RST
General - GND
Bluetooth - Arduino
TX - pin 16 (A2)
RX - pin 17 (A3)
VCC - + 5
GND - GND
HC-05 nos conectamos a su máquina de escribir o robot que va a controlar. Las opciones de conexión y los bocetos se pueden encontrar en mis otras instrucciones. Al escribir un boceto de robot, debe establecer la velocidad de conexión en 57600 y usar la biblioteca SoftwareSerial en el boceto.
Paso 6 Preparar el entorno y el firmware.
La mejor manera de escribir y editar un boceto es usar el IDE de Arduino. La versión IDE de Arduino no debe ser inferior a 1.8. Descargue el IDE de Arduino desde el sitio web oficial:
https://www.arduino.cc/en/Main/Software
Luego debe agregar la biblioteca al IDE de Arduino. El boceto utiliza una biblioteca SoftwareSerial.h (para la comunicación con el módulo Bluetooth):
Deberá descargarlo e instalarlo. Puede instalar la biblioteca desempacando el archivo y moviendo los archivos desempaquetados a la carpeta "bibliotecas" ubicada en la carpeta con el IDE Arduino instalado. O puede usar la herramienta de agregar biblioteca incorporada, sin desempaquetar el archivo descargado, seleccione el menú Sketch - Connect Library en el IDE de Arduino. En la parte superior de la lista desplegable, seleccione el elemento "Agregar biblioteca .Zip". E indique la ubicación del archivo descargado. Después de instalar la biblioteca, debe reiniciar el IDE de Arduino.
Nuestro control remoto se muestra de la misma manera que la versión anterior del control remoto, conectado a través de USB-TTL a través de un conector, la carga también se realiza a través de él. Al completar el boceto, haga clic en Restablecer.
