
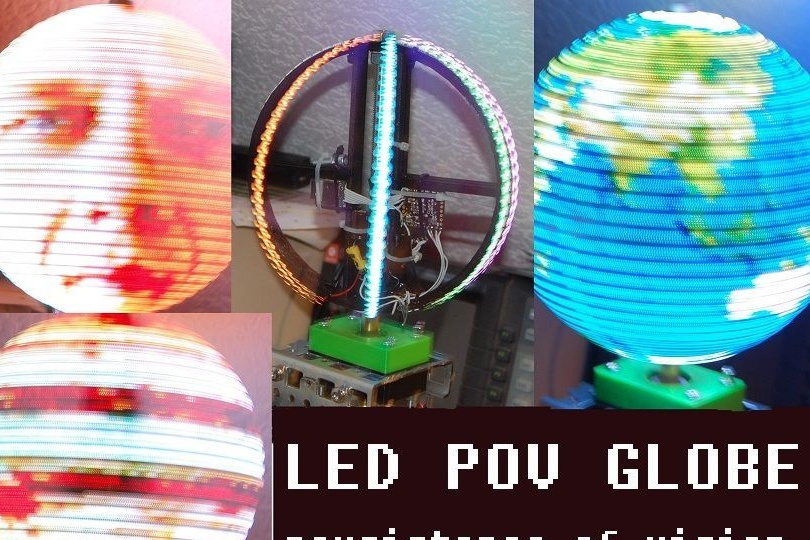
Este tutorial trata sobre cómo construir un globo POV con menos. electronica componentes que otros dispositivos similares. Mediante el uso de LED RGB con un controlador APA102 integrado. Esto le ahorrará la soldadura de numerosos cables. Puedes leer más sobre ellos. Estos LED no necesitan un controlador adicional. Están conectados directamente al microcontrolador de dos maneras. Esto le permite cambiar los LED muy rápidamente. Para obtener una imagen estable, la sincronización SPI viene a una frecuencia de 10 MHz. Otra ventaja de este diseño es el uso de una tarjeta flash, que almacena la imagen en formato BMP.
1 Materiales requeridos

Para el eje del globo necesitarás:

1. Perno con rosca M8 y una longitud de 250 mm.
2. Tuerca M8
3. Manga de latón de 10 mm y 100 mm de largo
4. Arandelas de plástico de 8 mm 2 piezas (archivos STL incluidos)
5. acoplamiento para quienes utilizarán el motor paso a paso NEMA 17
Para alimentar el anillo LED en el eje, necesitará
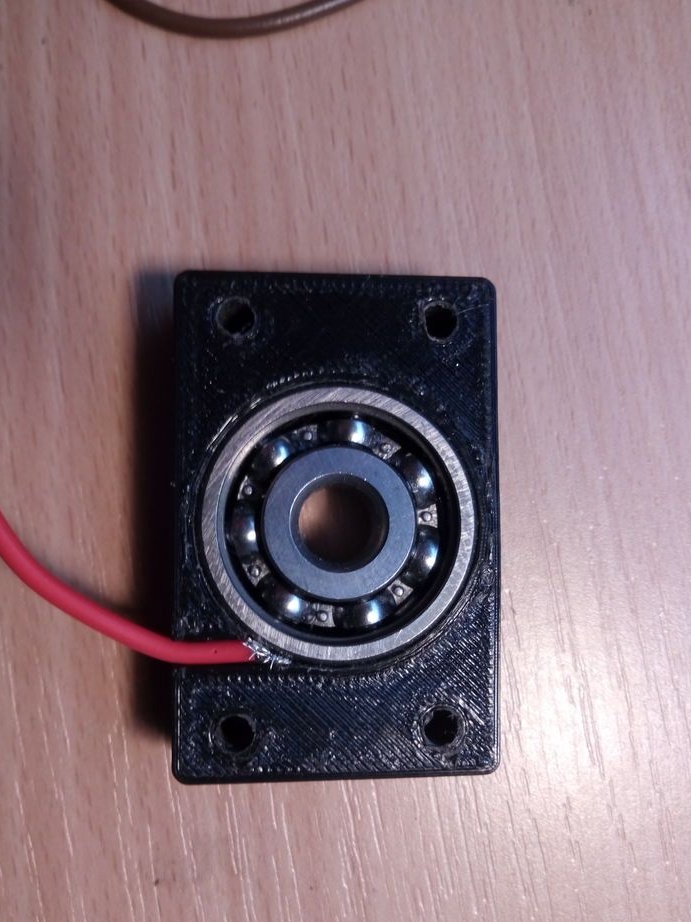
1. rodamiento de bolas 6300 (10x35x11)
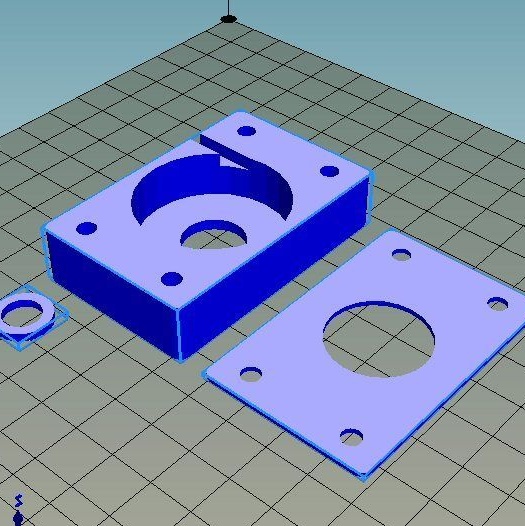
2. dos soportes para rodamientos. Impreso en una impresora 3D o de madera.
3. Cuatro pernos M4x40 con tuercas
4. Puntas en cables 2 pcs 8mm
5. con un diámetro de eje de 5 mm
6. 4 pernos M4 para el montaje del motor
7. tal vez un fanático de eso.
Alternativamente, puede usar cualquier motor con el par y control de velocidad correctos. El motor utilizado en este diseño tiene un par máximo a una corriente de 50 A, pero el consumo máximo de corriente durante el funcionamiento es de solo 18 A.
Para controlar el controlador del servomotor, use
1.
2. dos botones
Fuente de alimentación 12V para motor y 5V para LED. Como fuente de alimentación, puede usar la unidad anterior desde la PC. Puede comprar una fuente de alimentación de 12v / 5A y conectarse a ella
Para el anillo LED necesitarás:
1.664 LEDs 2 tiras de 32 piezas
2. Condensador 1000µF 10V
3. Sensor Hall e imán
4. La resistencia pull-up 1k, 10k
5. El anillo debe imprimirse en una impresora 3D o usar una pieza de tubo de PVC
6. Lazos de plástico (100 mm)
7. Un buen pegamento que se pega y no se separa a 2500 rpm
También necesitará un microcontrolador de hélice Parallax. O puedes usar otro el modelo controlador, pero además cobra una tarifa por. Este controlador está programado y flasheado tan simple como Arduino. Necesitará un adaptador USB-TTL para programar ambos controladores.
Cuerpo.
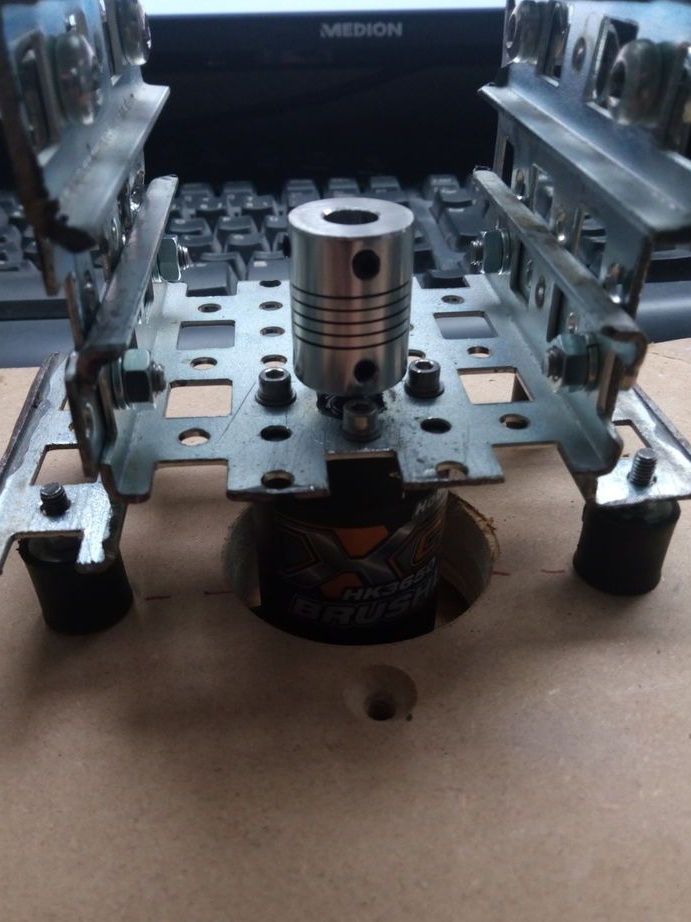
Vivienda para hecho en casa Puedes aguantar lo suficiente. Lo más importante es que puede sujetar de forma segura el motor y los cojinetes.
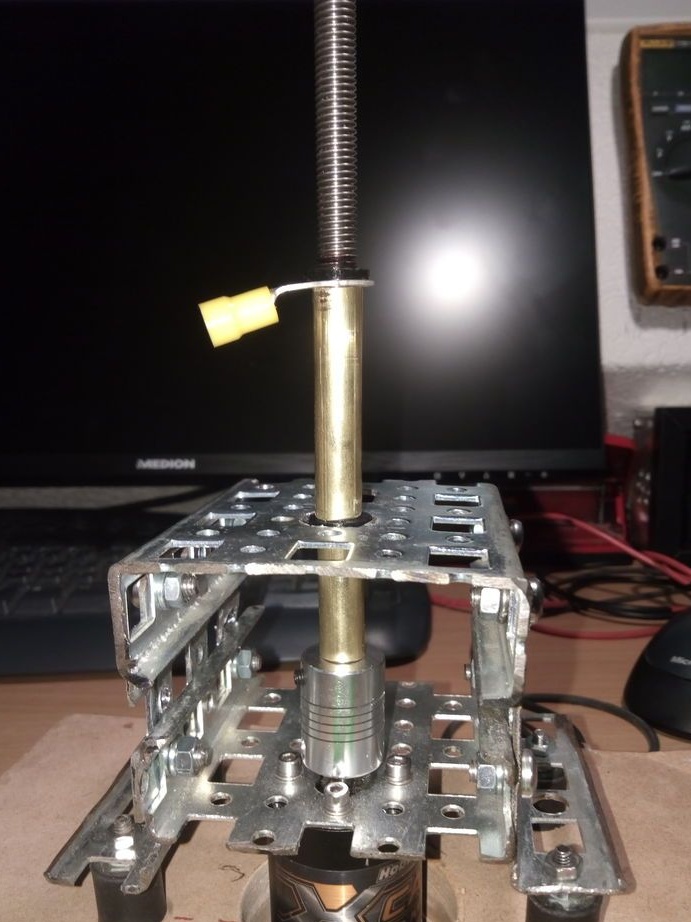
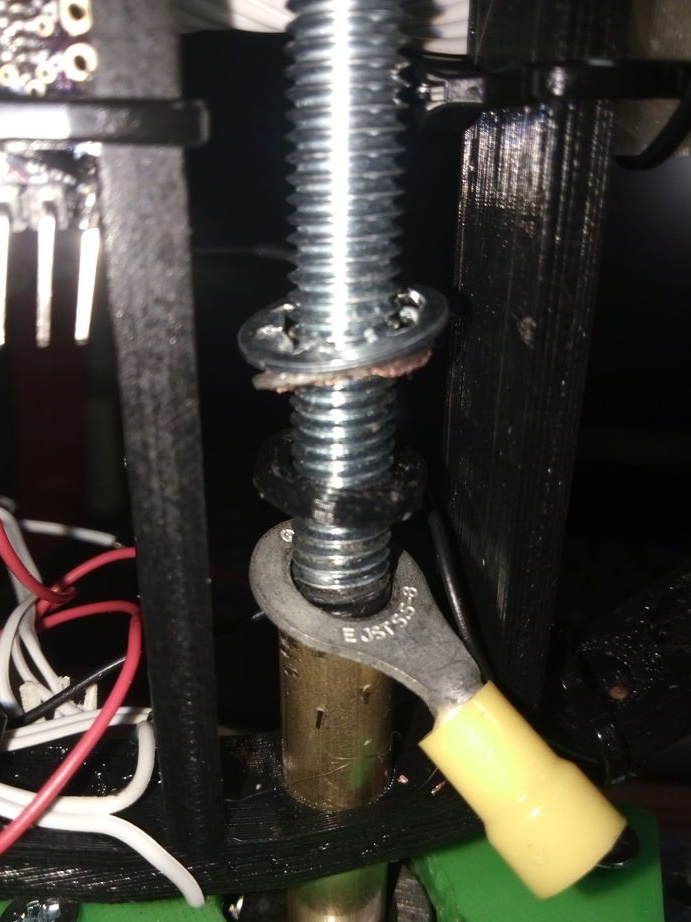
Se utiliza un perno de 250 mm de largo para el eje de transmisión.La longitud de los casquillos de latón es de 50 y 30 mm. Depende del tamaño del anillo y la longitud del eje. El manguito superior y más largo debe estar aislado del perno, ya que se utiliza para suministrar más energía a los LED. Para hacer esto, envuelva la cinta aislante en una horquilla o use termocontraíble, también se necesitarán dos arandelas de plástico. Deberá perforar el manguito a 8,5-9 mm; de lo contrario, no encajará. La otra manga junto con la barra forma un contacto negativo.
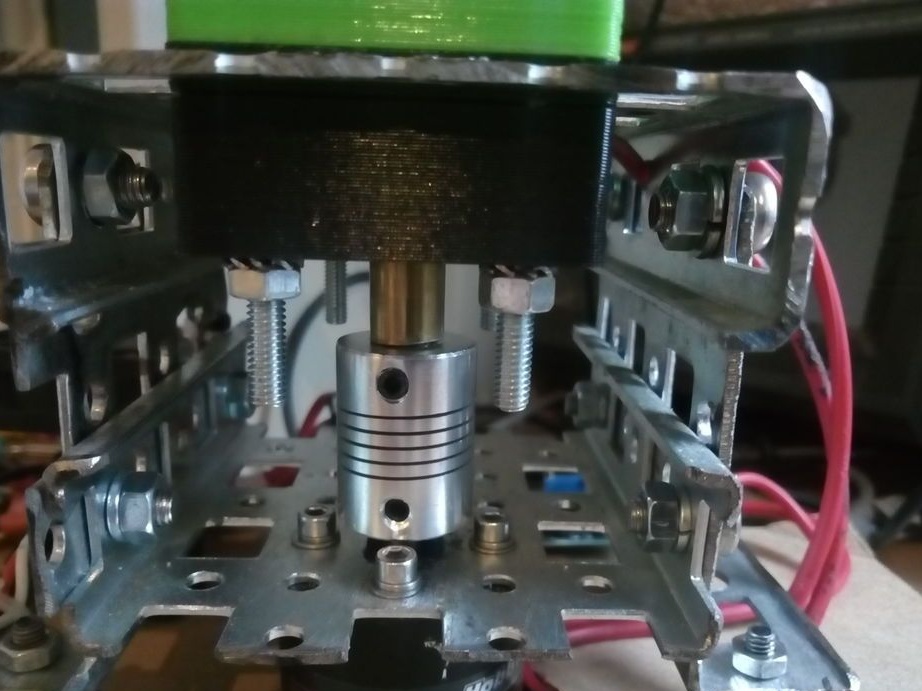
La potencia negativa se coloca en una ranura especial y se presiona contra el rodamiento en el soporte, que se puede imprimir en una impresora. Archivo STL de soporte en archivo.


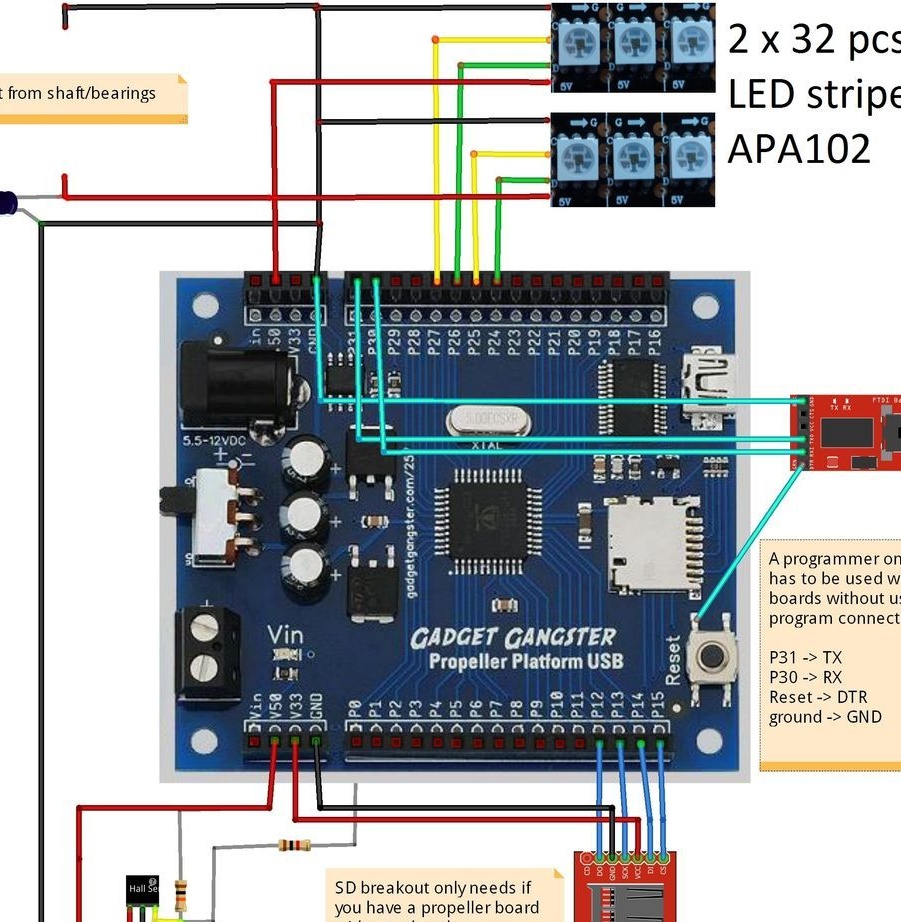
Ahora necesita conectar el motor eléctrico, como se muestra en el diagrama.
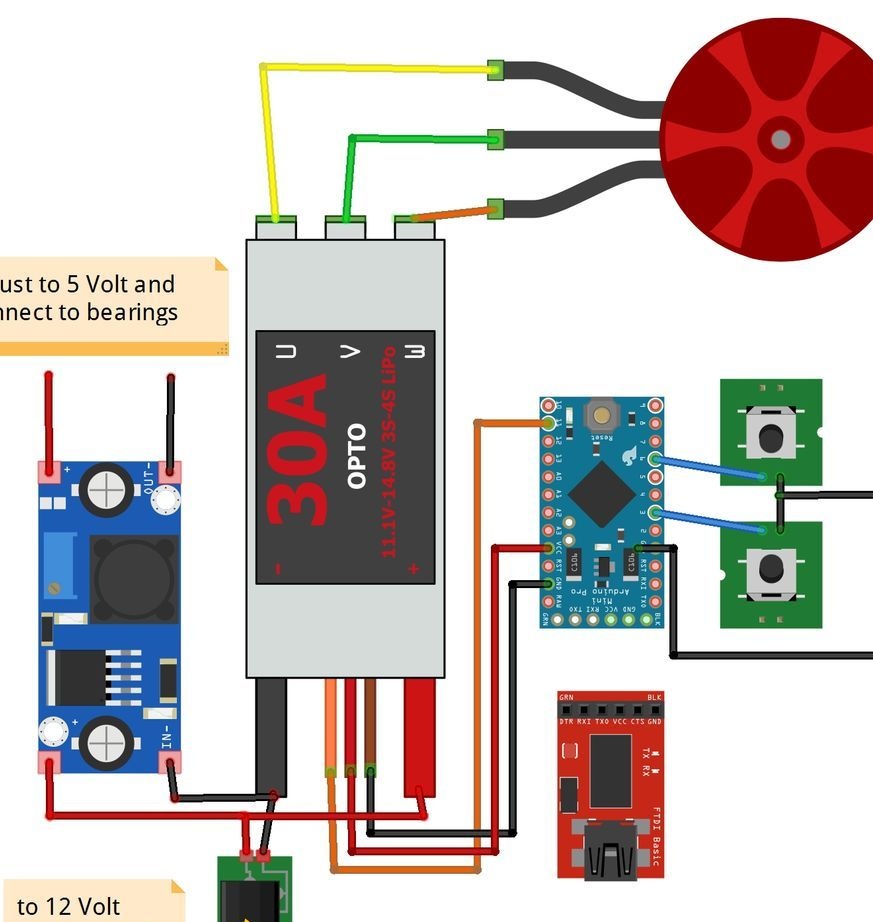
Se usan dos botones en el diagrama para ajustar la velocidad. Cuando enciende la alimentación, el ESC recibirá un valor de 500 μs. Presione uno de los botones para encender el motor. El boceto tomará el valor "StartPos = 625". Más tarde, cuando ajuste la velocidad, este valor se puede cambiar. Presione el botón durante dos segundos y el motor debería detenerse.
Montaje de la estructura central.
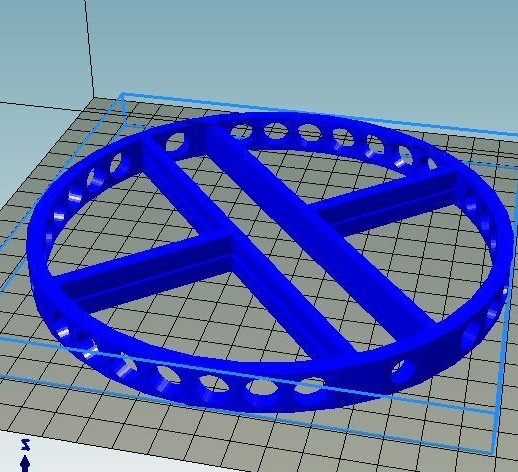

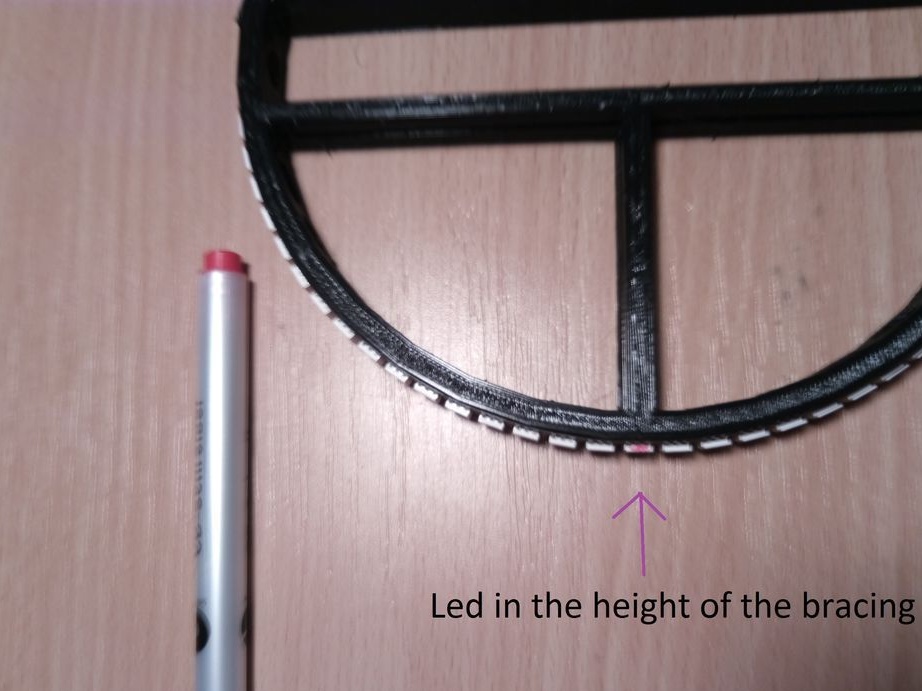
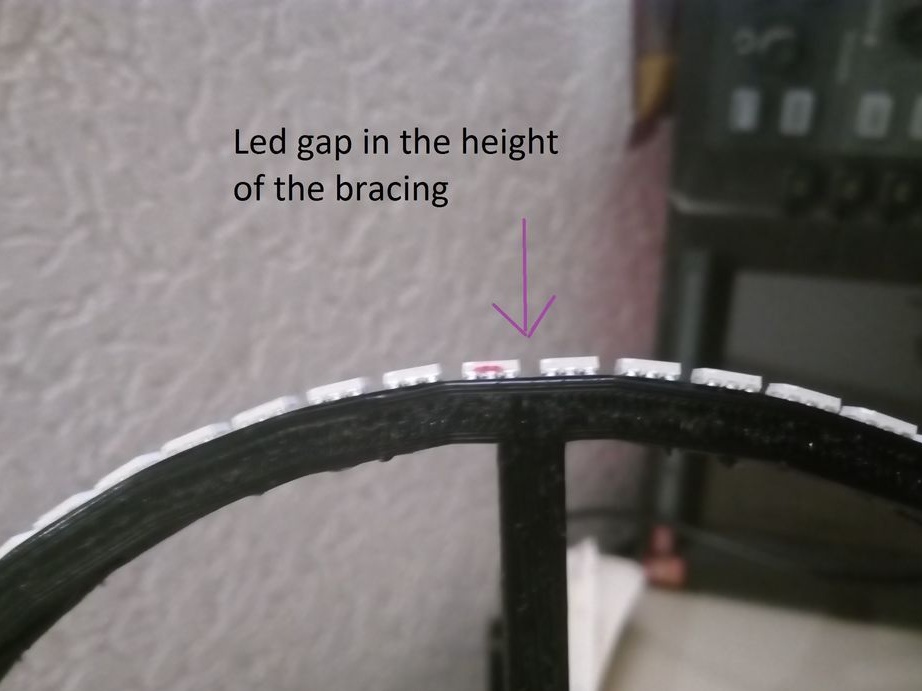


Para hacer esto, imprima el anillo desde el archivo adjunto. El autor hizo muchos agujeros para reducir el peso. Puedes usar una pieza de tubo de PVC. Se cortan dos tiras de 32 LED. Dos tiras de LED forman líneas pares e impares. Organice las cintas de modo que los LED de una tira estén ubicados entre los LED de la otra, pero desde la parte posterior. Después de sujetar la cinta, puede conectar los LED de la placa del controlador. Y luego necesita equilibrar todo el conjunto.
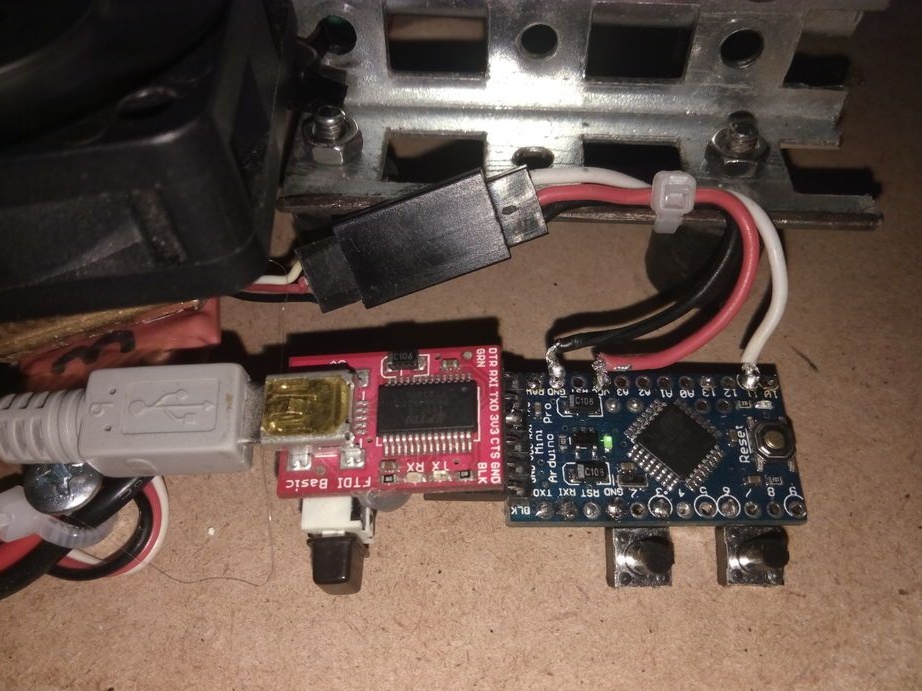
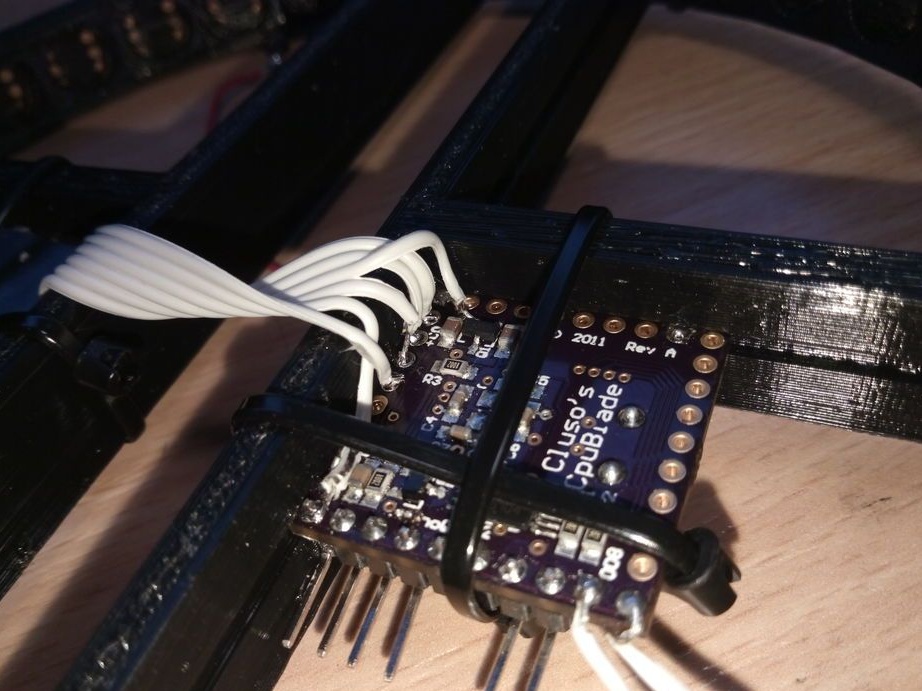
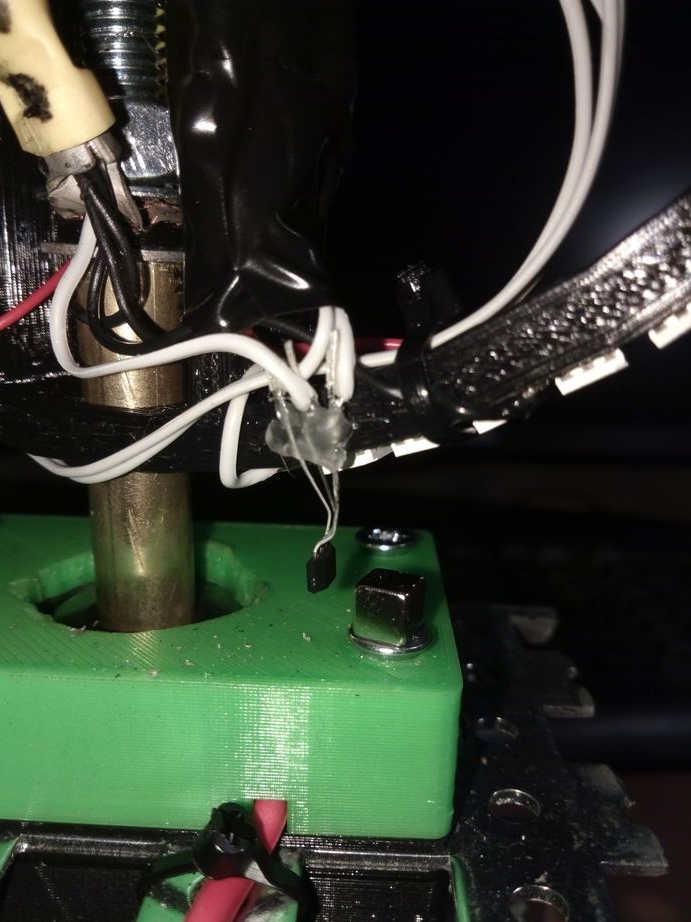
Las siguientes fotos muestran cómo conectar todos los componentes del dispositivo. La foto también muestra el sensor de pasillo instalado con un imán.
Para programar el microcontrolador Parallax Propeller necesita
NO conecte su equipo a un puerto USB o serie hasta que haya instalado el software. Se pueden encontrar más detalles sobre la carga de firmware a Parallax
El autor utiliza una placa MCU más antigua y, en consecuencia, menos económica, en términos de consumo de energía, porque no puede encontrar nuevas bibliotecas en las nuevas placas controladoras.
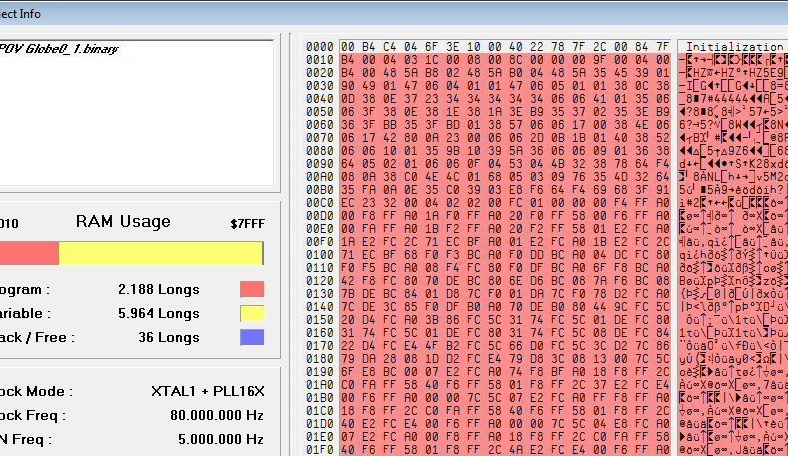
Después de recopilar y conectar todo, debe programar el controlador. El autor hace esto con ayuda. Archivos con firmware en el archivo.
Ahora puede intentar iniciar el dispositivo. Desde el principio, copie la imagen de prueba en la tarjeta SD y péguela en la ranura.
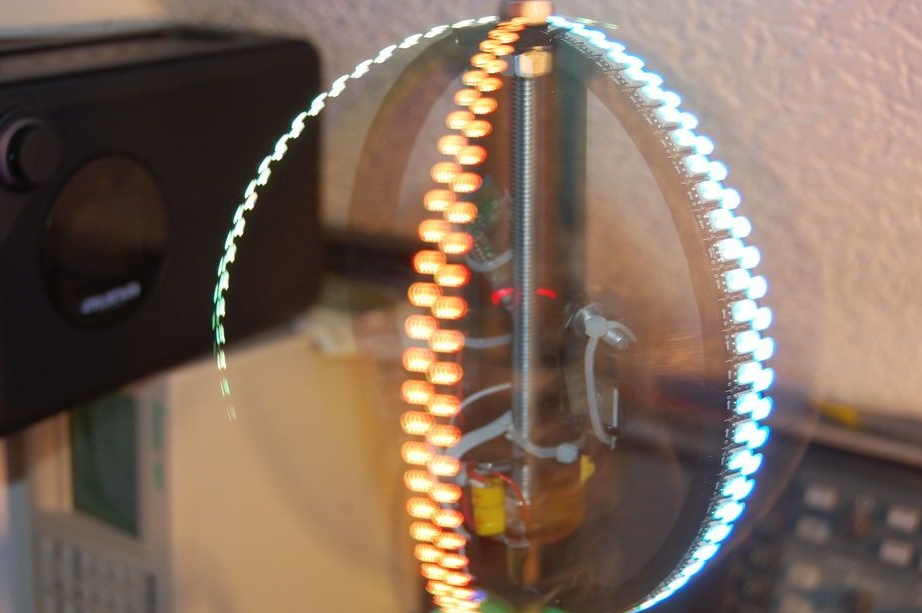
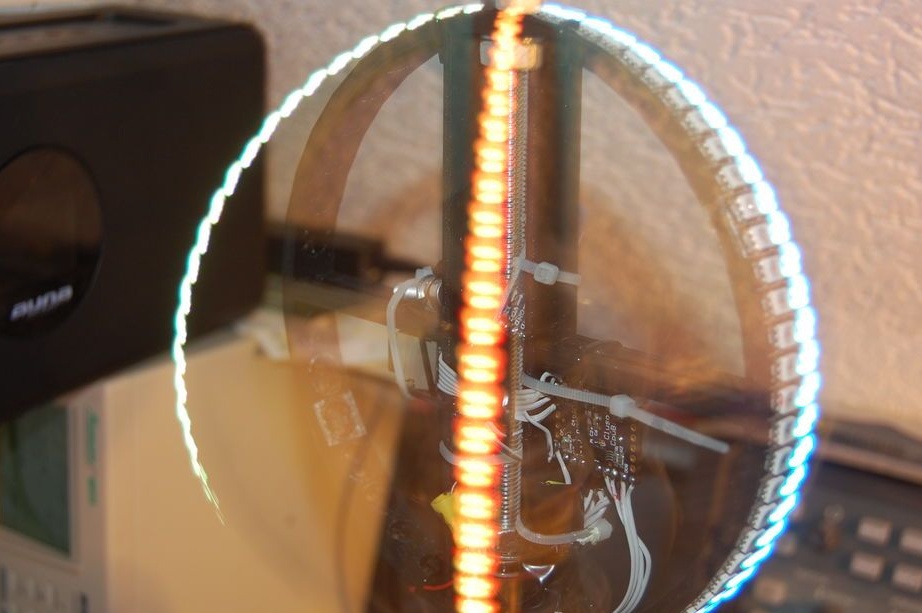
• Si gira el anillo con la mano, los LED deberían parpadear cada vez que el sensor del pasillo pase el imán
• Encienda el motor. Para aumentar la velocidad con los botones, es necesario asegurarse de que los LED se iluminen como se muestra en 2 fotos
• Conecte el terminal Arduino al controlador del motor.
• Recordar el valor mostrado.
• Pare el motor
• Escribir el valor previamente almacenado en la variable "startPos"boceto POV_MotorControl
• Programe el Arduino nuevamente.
La próxima vez que su motor arranque inmediatamente a la velocidad correcta. Ahora puedes "Rellenar" en el mapa cualquier imagen. Para hacer esto, cambie el tamaño de la imagen en 120x64 píxeles, gire la imagen en el sentido contrario a las agujas del reloj 90 grados y espeje verticalmente. Disminuya el brillo de la imagen, ya que los LED son muy brillantes. Para hacer esto, es mejor usar la corrección gamma con un coeficiente de 0.45.
Guardar imagen como BPM 24 bit sin compresión. Después de todas las manipulaciones, el archivo de salida tendrá el tamaño 23094 byte.



