

Hoy, el autor de Instructables bajo el apodo de Techgenie habló sobre dónde electrónica hay Y trajo un enlace al primero, en el que no está, solo un electricista. Es más elegante, y será discutido en mi traducción.
Si aún no quieres que tengas uno, mira el video y desea que este dispositivo llegue a tu casa desde los primeros segundos de visualización:
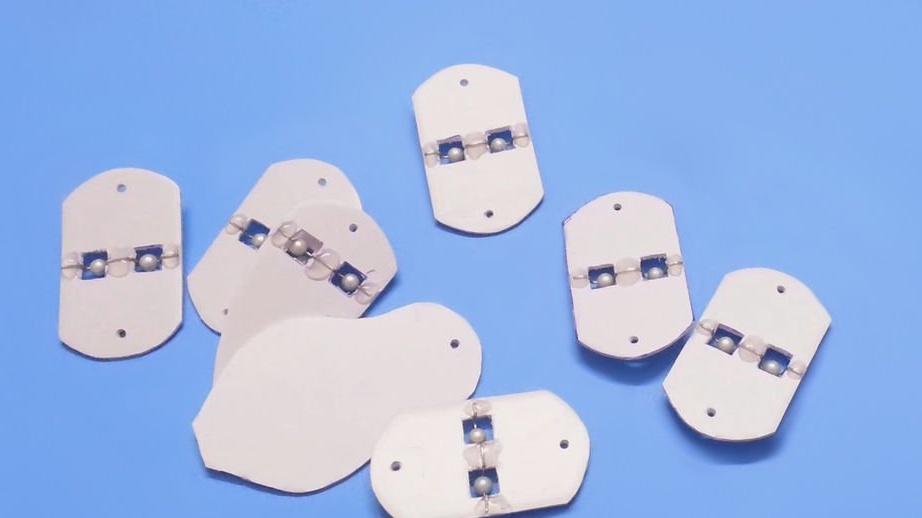
El maestro corta los enlaces de la serpiente robótica de cartón:
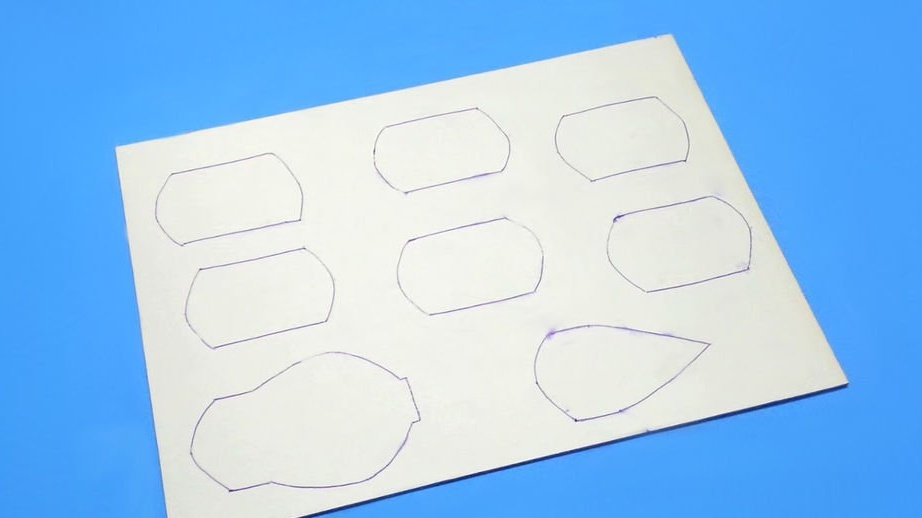
Extractos de una hoja:

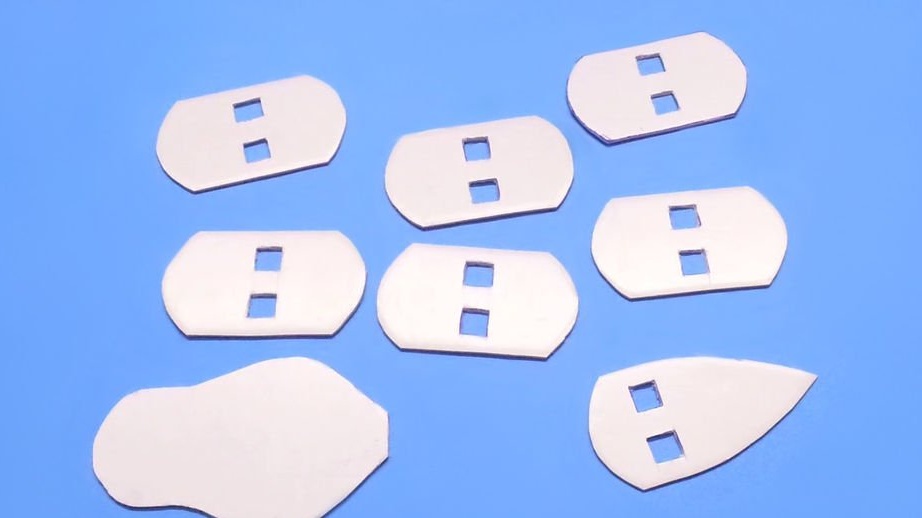
Hace agujeros cuadrados para rodillos en ellos:
Que hace de cuentas y clips de papel, saludos "DU Vasily Biletsky":
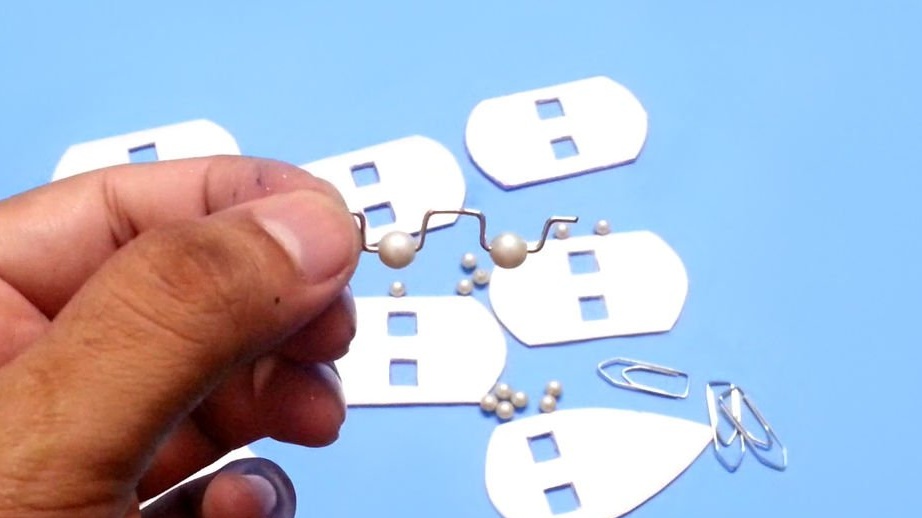
Fija el eje de los rodillos con una pistola de pegamento, se asegura de que los rodillos no estén atascados con pegamento. Taladra agujeros para conectar enlaces:
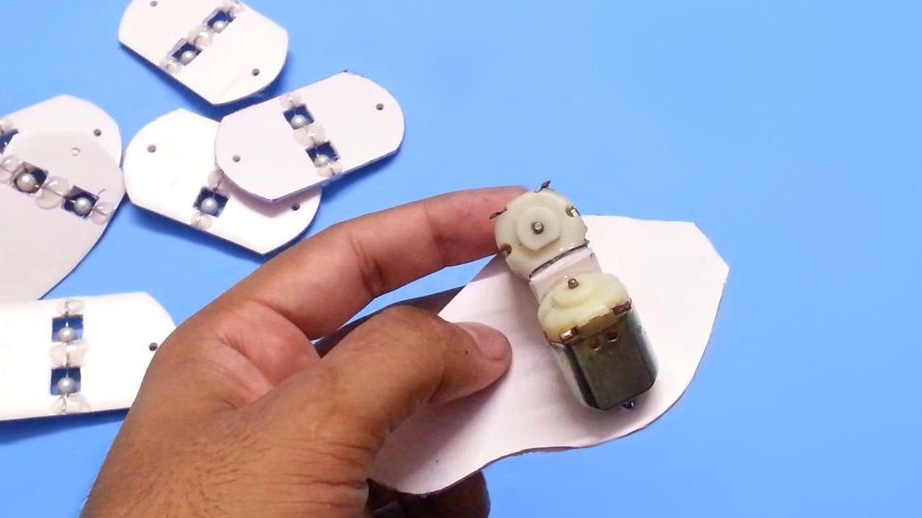
Se adhiere a un soporte triangular para motores de CC:

Aplica motores, anota dónde perforar agujeros para ejes, taladros, ejes roscados, motores de pegamento:
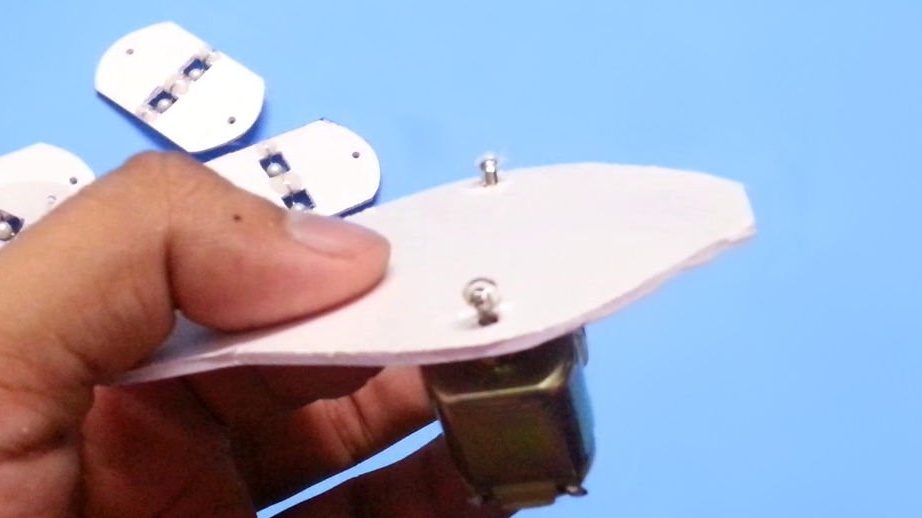
En los ejes de los motores se fabrican bolas adhesivas termofusibles:
Conecta enlaces con ... cables y botones:
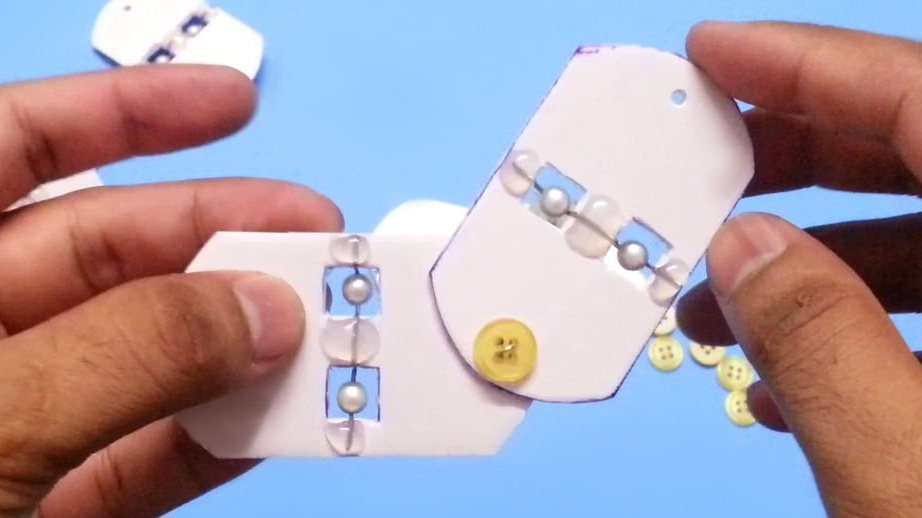
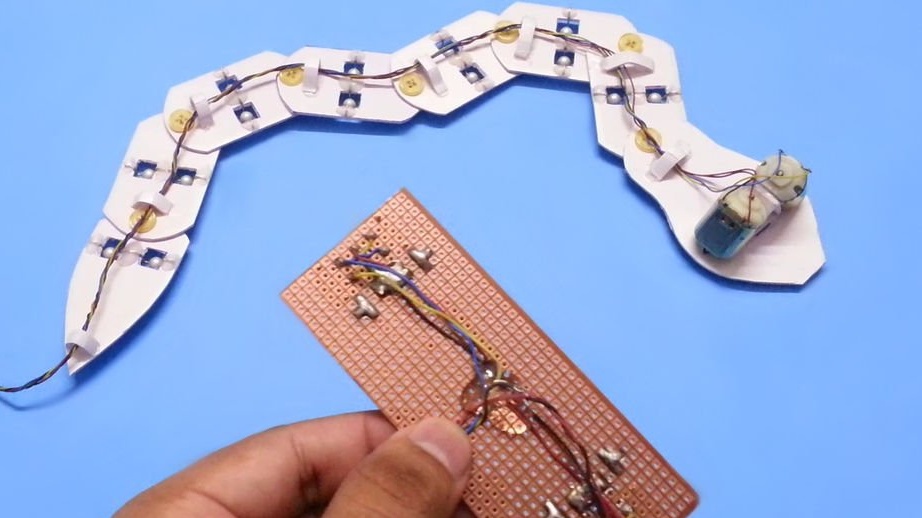
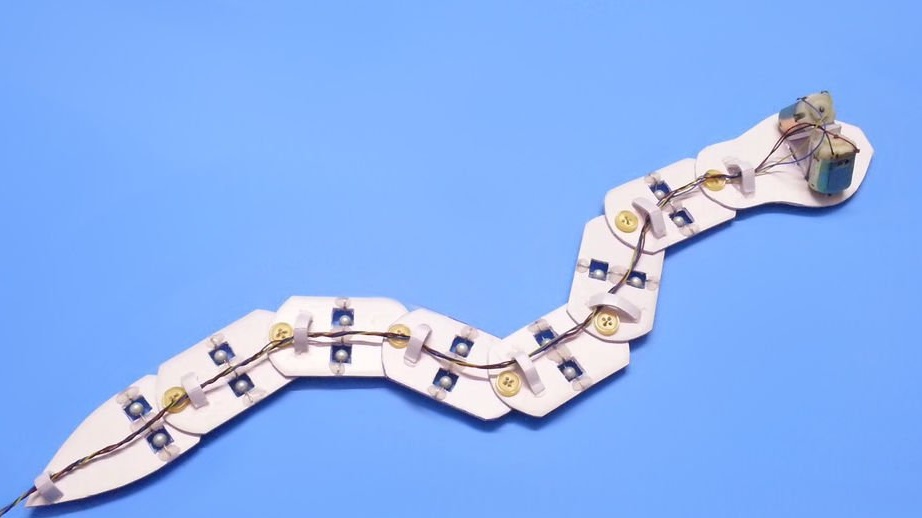
La serpiente robótica está ensamblada, pero aún está inmóvil:

Corta tiras de cartón, toma un cable de cuatro hilos, suelda dos alambres a cada uno de los motores y se sujeta con la primera tira:

Y el resto:
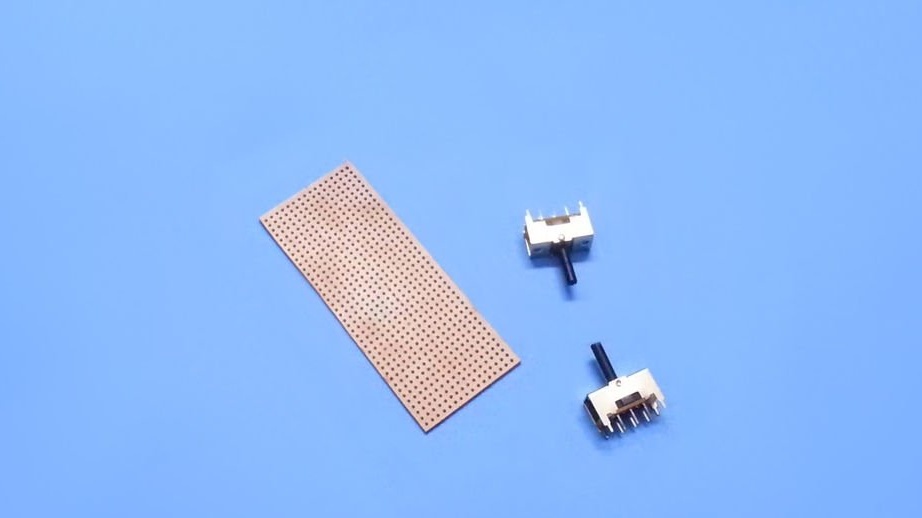
Se necesitan dos interruptores en tres posiciones (medio a apagado) y dos direcciones, así como una pieza de una placa de pruebas tipo perfboard:
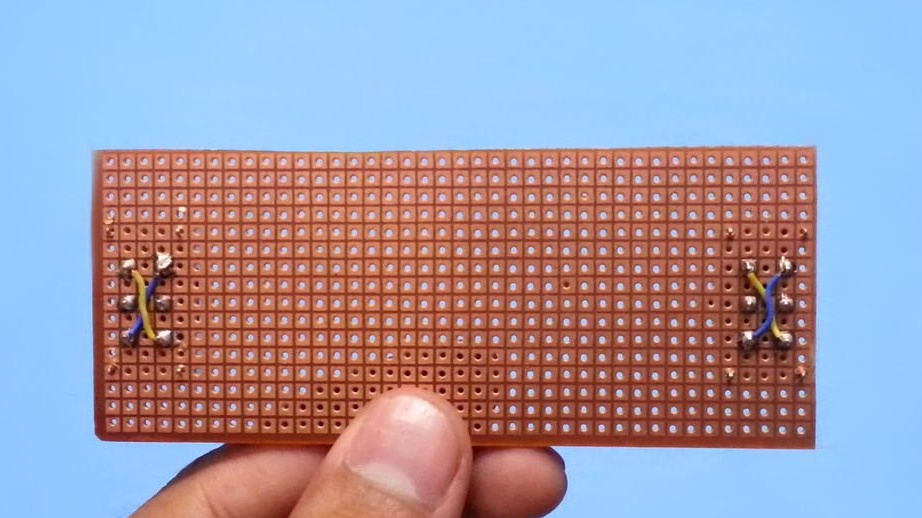
Usando puentes, convierte ambos interruptores en reversibles:
Él hace resortes para la batería 18650 de clips de papel, lo pone. ¡No lo hagas! ¡Toma el compartimento terminado! ¡Use la batería solo con protección! Aún mejor es la bahía de 2 piezas. AA o AAA con pilas o baterías apropiadas.
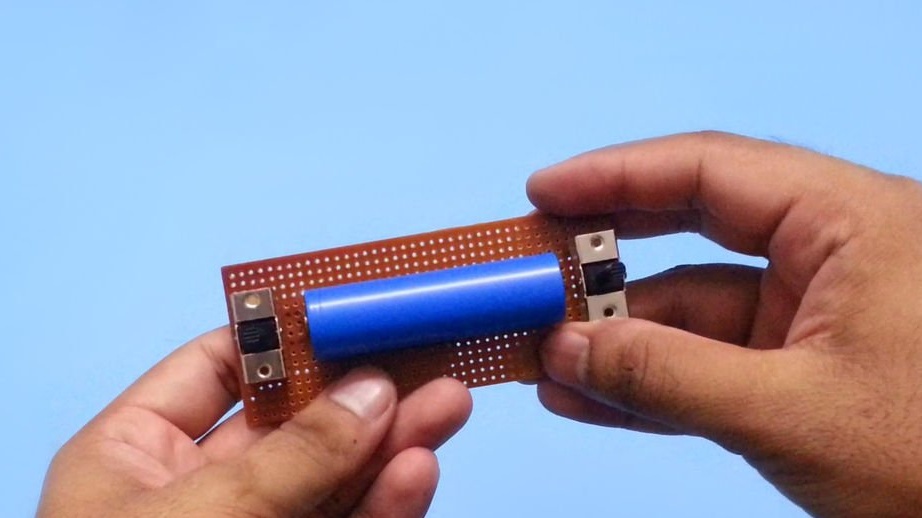
Las grapas longitudinales contribuyen a mantener la batería en su lugar:
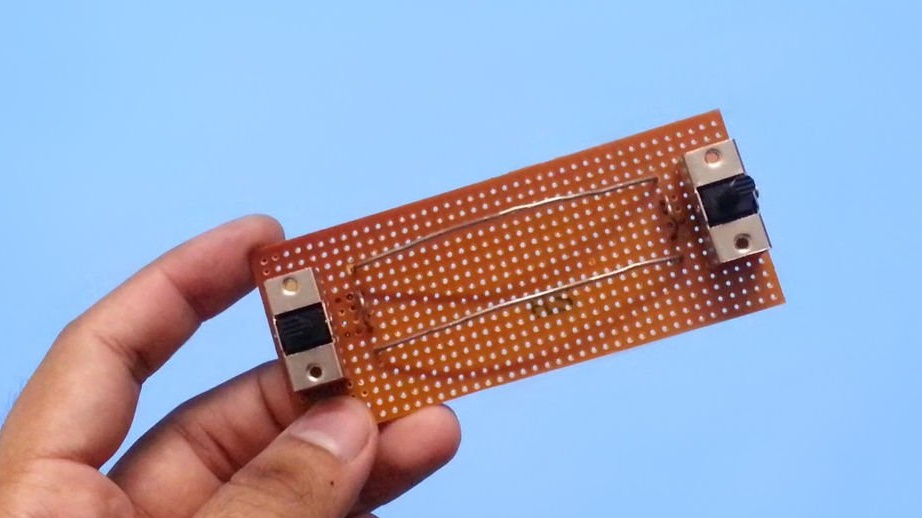
Entonces, mientras se ve la parte posterior del tablero de control remoto:
El maestro conecta el cable de la serpiente robos, realiza conexiones de acuerdo con el esquema:

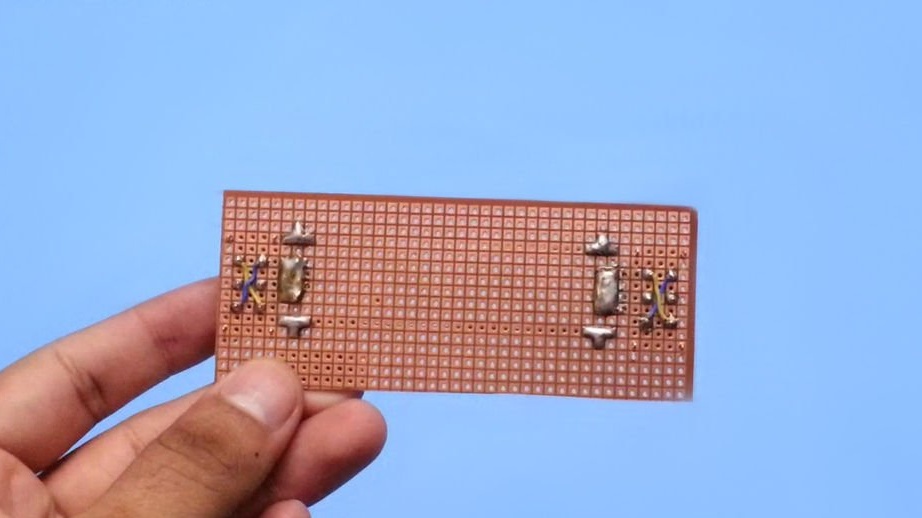
Ahora la otra cara del tablero de control remoto se ve diferente. El cable se fija con adhesivo termofusible, es importante que haya una capa aislante de este adhesivo entre este y la placa de pruebas. Ahora, este lado del tablero debe cubrirse con un dieléctrico, ya que los pulsos de autoinducción se producen cuando los motores están apagados.
Eso está todo hecho:

Debido a las características de diseño de la robosnake, con las mismas posiciones de interruptor, los motores deben girar en direcciones opuestas. Si este no es el caso, uno de ellos debe revertirse. Después de eso, elija experimentalmente la posición del control remoto, en la que la posición hacia adelante de ambos interruptores corresponde al movimiento hacia adelante. Los motores se pueden detener y revertir por separado, lo que obliga a la serpiente robos a realizar varios trucos.