







El concepto principal de este proyecto es que, con la ayuda de varias ondas cerebrales, el usuario podrá controlar el robot, el cursor en su PC o encender / apagar las luces de su casa, mientras que el microcontrolador (Particle Photon) crea un análisis en línea de las ondas cerebrales del usuario. Entonces sí, con este dispositivo realmente puedes usar el Poder del Pensamiento
 ... Este dispositivo no solo está destinado a perezosos o fanáticos, sino que fue creado con el fin de brindar a las personas la oportunidad. que luchan todos los días con su discapacidad. El robotdesarrollado por el autor funciona igual que un sistema de silla de ruedas casa La automatización ayudará al usuario a controlar la luz o la televisión, incluso si no puede moverse. El modo de controlador de PC puede ser útil incluso para aquellos que están completamente sanos.
... Este dispositivo no solo está destinado a perezosos o fanáticos, sino que fue creado con el fin de brindar a las personas la oportunidad. que luchan todos los días con su discapacidad. El robotdesarrollado por el autor funciona igual que un sistema de silla de ruedas casa La automatización ayudará al usuario a controlar la luz o la televisión, incluso si no puede moverse. El modo de controlador de PC puede ser útil incluso para aquellos que están completamente sanos. Como funciona
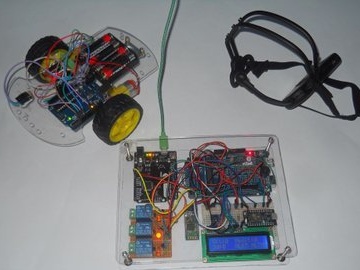

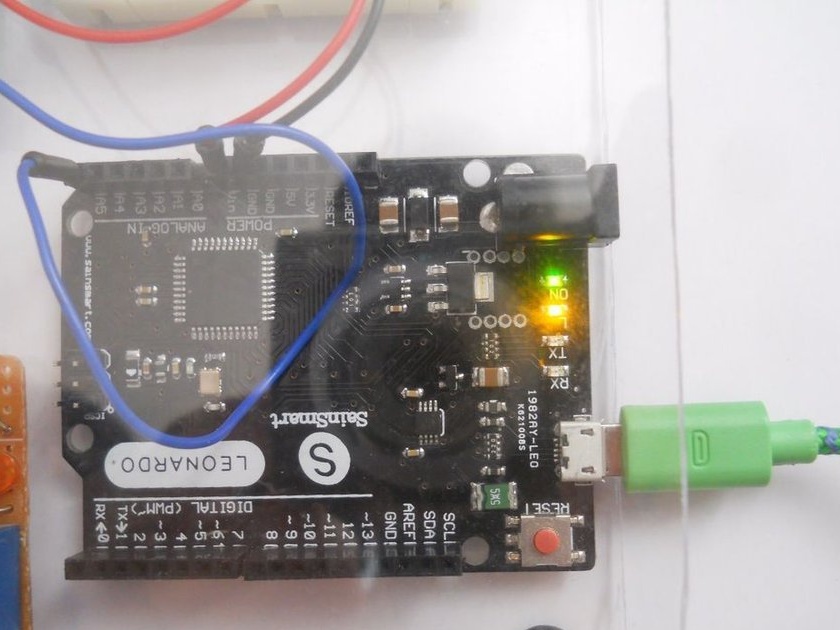
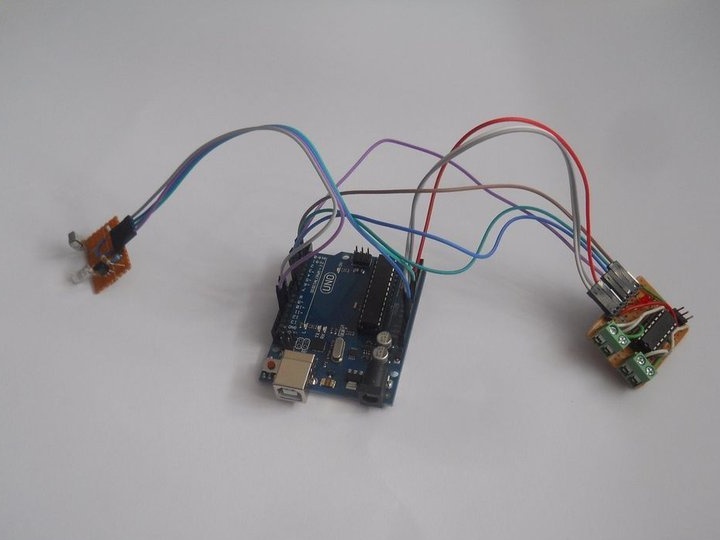
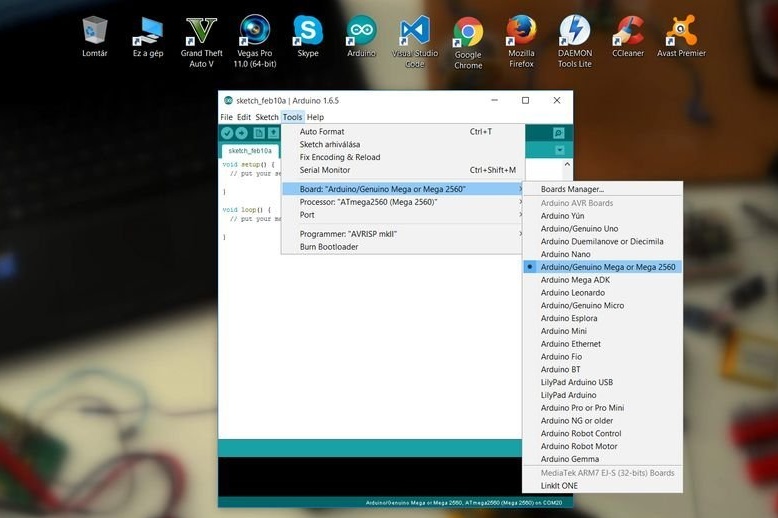
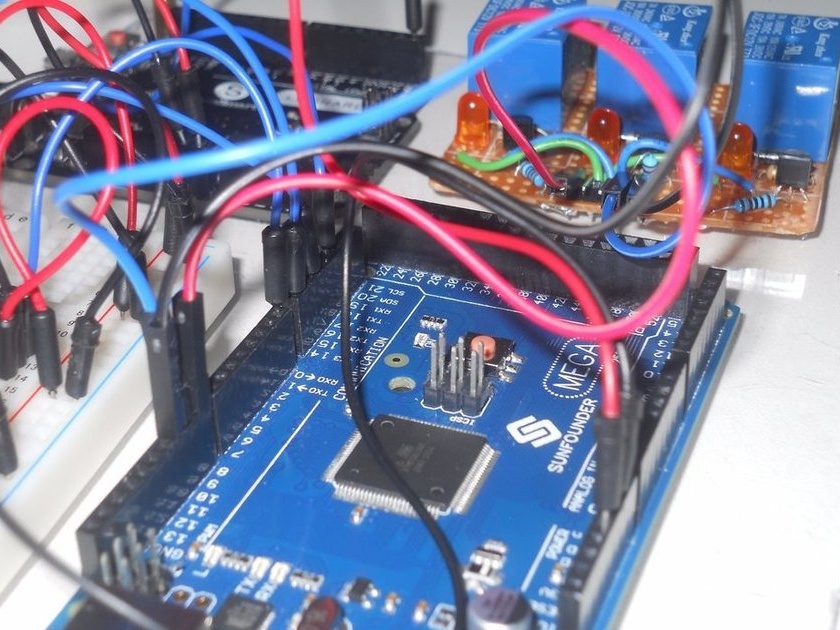
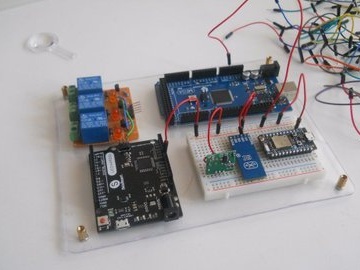
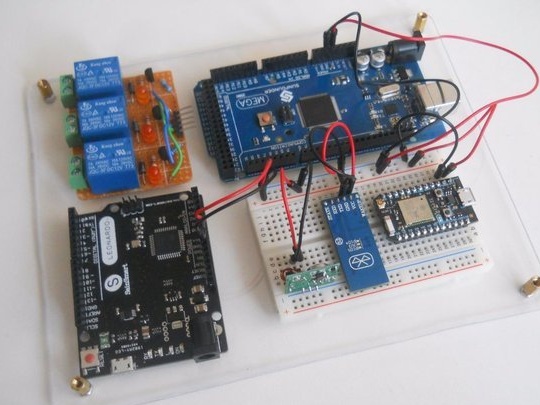
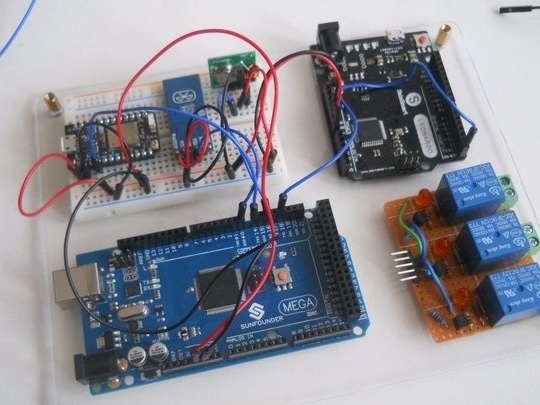
Se utilizaron cuatro microcontroladores para dar vida a este proyecto: Arduino Mega, Arduino Leonardo, UNO y Particle Photon. Mega es el cerebro del proyecto, que recibe señales de los auriculares, analiza y envía comandos a otros dispositivos. Pasa todos los datos a Particle Photon, que crea un servidor web. Leonardo controla el mouse en una PC, y Uno se usa para recibir IR (señales infrarrojas) y controlar el robot. Un dispositivo es capaz de controlar tres dispositivos diferentes (o más si desea programar algo más). Además, estos tres dispositivos diferentes se denominarán canales. El dispositivo cambia entre estos canales si cierra los ojos:
Cierra los ojos durante 1-2 segundos: cambia a la función de domótica
Cierra los ojos durante 2-4 segundos: cambia al modo de controlador de robot
Cierra los ojos durante 1 a 6 segundos: cambia al modo controlador del mouse
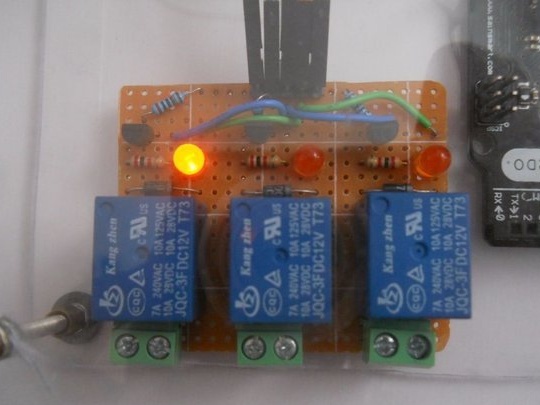
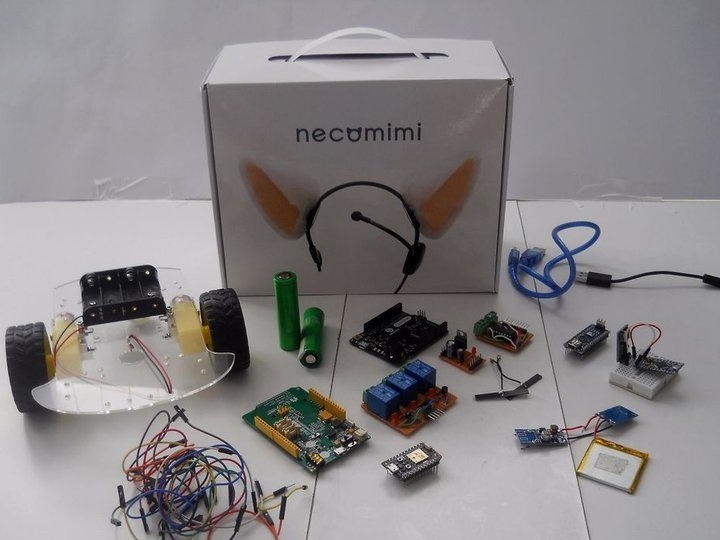
Para hacer la función de domótica, a la que puede conectar cualquier cosa: un televisor, bombillas, enchufes, todo lo que desee, se utilizaron relés
Para la percepción de las ondas cerebrales: Necomimi, que puede mover los oídos dependiendo de las ondas cerebrales (atención, meditación). Dentro de un pequeño chip que lee las ondas cerebrales, filtra el ruido y da una muy buena señal. Funciona con la interfaz UART (serie), por lo que con algún pirateo podemos usar Arduino para leer ondas cerebrales.El papel de este auricular es transmitir ondas cerebrales de forma inalámbrica a un servidor central.
Si ya estás familiarizado con proyecto anteriorentonces puede omitir la fase de desmontaje y remodelación de Necomimi.
Baja para ver cómo desmontar y hacer un auricular inalámbrico Bluetooth con él.
Sistema de control de automatización del hogar
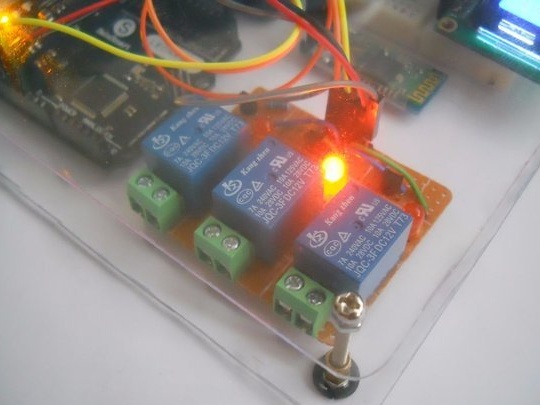
Si cambia al modo de automatización del hogar, aumente su nivel de atención por encima de 70 para encender el primer relé, aumente su nivel de meditación por encima de 70 para encender su segundo relé y aumente ambos valores por encima de 70 para encender su tercer relé. Es un poco difícil, pero no imposible después de entrenar la mente. Si el relé ya está encendido, use el mismo comando para apagarlo (si está encendido, alcance 70 para apagarlo). Cuando el sistema está listo, cualquier dispositivo de alto voltaje (luz, TV, computadora, ventilador, cualquier cosa) se puede conectar al módulo de relé.
Control del mouse
El cursor está controlado por las emociones. Si el nivel de atención es inferior a 25, se mueve hacia la izquierda, si entre 25 y 50 se mueve hacia la derecha, si entre 50 y 75 sube, y si entre 75 y 100 baja. Puede emitir un clic en el botón del mouse aumentando el nivel de meditación. Por supuesto, necesitas entrenar para esto.
Control de robot
El robot solo tiene tres equipos diferentes: detente, gira a la izquierda y avanza. ¿Por qué solo dos opciones de movimiento? Porque estas dos direcciones son suficientes para mover el robot a cualquier parte. Use su nivel de meditación para rotar con el robot, y cuando haya alcanzado la dirección que desea mover, detenga el robot, luego avance con el nivel de atención. Esta es la mejor manera de controlar el robot, e incluso los principiantes que no pueden controlar sus valores de atención / meditación tan bien pueden jugar con este robot.
El auricular transmite señales BT (Bluetooth) al Arduino Mega, que analiza los bytes entrantes y, según los pensamientos del usuario, controla varias funciones. Al principio, el autor quería usar Particle Photon como transmisor de datos, pero este pequeño módulo tuvo un papel en la creación de un servidor web. Fue la mayor modificación en todo el proyecto. También usó módulos Arduino caseros, pero puedes comprar estos módulos en línea.
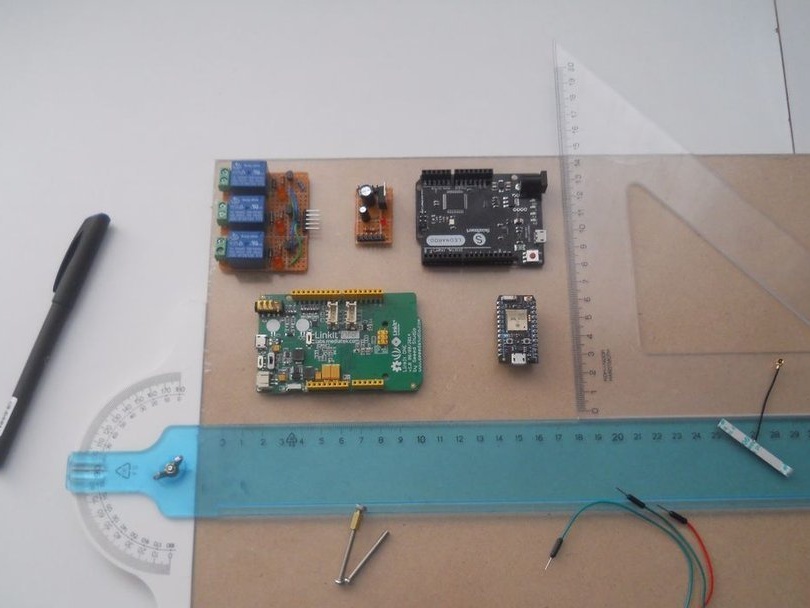
Todas las partes son de GearBest.com. Esta es una tienda en línea, lo mismo que eBay, pero los repuestos se entregan mucho más rápido (tal vez todo esto en aliexpress). Por lo tanto, si desea crear su propio controlador de juego, controlador de robot o Detector de fuerza, comience comprando piezas.






Herramientas requeridas:
soldador
soldar
pistola de pegamento
cinta autoadhesiva / cinta de doble cara
pelacables
cortadores de alambre
Equipo
/ Arduino Nano
Software:
Hackear Necomimi







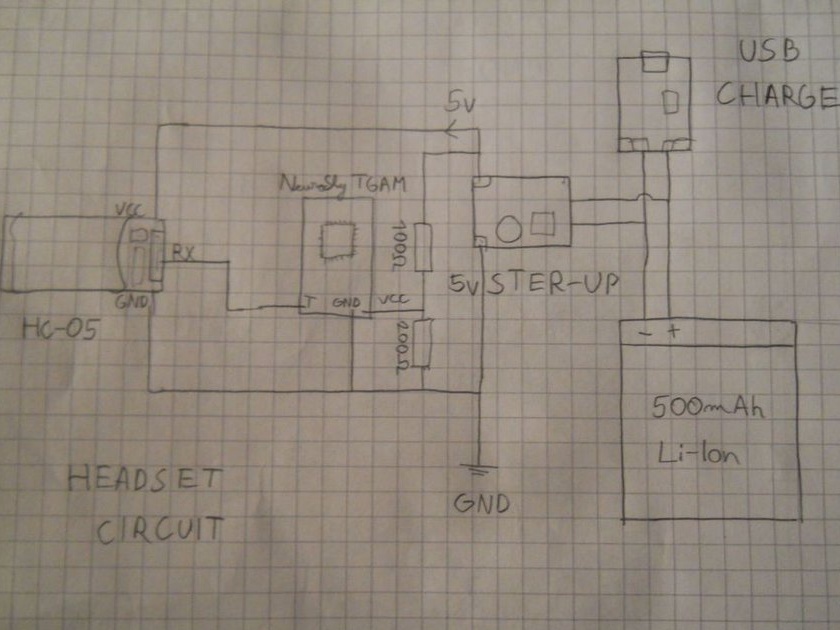
Queremos modificar este juguete EEG para la transferencia de datos a través de Bluetooth, por lo que primero desmontaremos la carcasa. Los tornillos están debajo de la pegatina. Retire la pegatina y la parte posterior del dispositivo y encontrará pequeñas tablas dentro. El que está debajo de la placa principal es el chip Neurosky TGAM. Se sueldan 4 cables de la placa principal del microcontrolador, así que tome un soldador y retire con cuidado este circuito. Ahora suelde los tres cables al pin GND, al pin VCC y al pin T. Un pin T es una salida de transmisor con una velocidad de 57600 baudios, que envía paquetes de datos a nuestro microcontrolador. Una vez que haya soldado los tres cables anteriores, puede construir su propia fuente de energía recargable. El autor utiliza una batería de iones de litio de 500 mAh, un circuito cargador USB, un circuito de refuerzo de 5 V y dos resistencias (100 ohmios y 200 ohmios) para proporcionar una fuente de alimentación separada de 3,4 V para el chip y el módulo Bluetooth. En la foto, el diagrama de conexión.
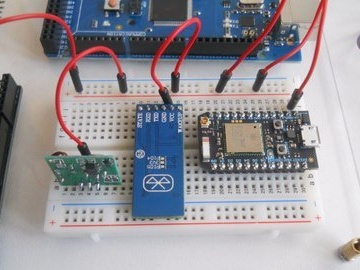
Si el circuito está listo, configure el módulo Bluetooth.
Siga las instrucciones y figuras a continuación y cree sus propios auriculares inalámbricos EEG.
La parte más importante es conectar el pin "T" al "RX" en el módulo Bluetooth.



HC-06: Primero cargue el boceto llamado "HC_06_Bluetooth" en Arduino UNO, luego conecte el módulo Bluetooth como se muestra en el diagrama.
// HC-06-Bluetooth
configuración nula () {
// Inicie la serie de hardware.
Serial.begin (9600); // velocidad de transmisión HC-06 predeterminada
retraso (1000);
Serial.print ("AT");
retraso (1000);
Serial.print ("VERSIÓN AT +");
retraso (1000);
Serial.print ("AT + PIN"); // para eliminar la contraseña
retraso (1000);
Serial.print ("AT + BAUD7"); // Establezca la velocidad de transmisión en 576000, por ejemplo, Necomimi dafault
retraso (1000);
Serial.begin (57600); //
retraso (1000);
}
bucle vacío () {
}Abra el Monitor de serie en el Arduino IDE y espere a que Arduino configure el módulo BT. Su módulo Bluetooth ahora está configurado a 57600 baudios. Puede probar muchas aplicaciones BCI (Brain Computer Interface) porque este juguete Necomimi pirateado será compatible con cualquier aplicación Neurosky.
Puede usar estas aplicaciones para aprender a controlar sus ondas cerebrales.
HC-05: Luego use "HC_05_Bluetooth" y cargue su Arduino de la misma manera que antes.
// HC-06-Bluetooth
void setup () {
// Inicie la serie de hardware.
Serial.begin (9600); // velocidad de transmisión HC-05 predeterminada
retraso (1000);
Serial.print ("AT");
retraso (1000);
Serial.print ("VERSIÓN AT +");
retraso (1000);
Serial.println ("AT + ROLE = 1"); // configura el HC-05 en modo maestro
retraso (1000);
Serial.println ("AT + LINK =" Inserte su dirección aquí "); // ahora el módulo debería conectarse automáticamente
retraso (1000);
Serial.print ("AT + UART = 57600,1,0"); // Establecer la velocidad en baudios a 576000
Serial.begin (57600); //
retraso (1000);
}
bucle vacío () {}
Conecte el pin "EN" del HC-05 al Arduino 3v3. Debe escribir la dirección de su módulo HC-06 en código. Verifique la dirección del módulo BT en su teléfono inteligente Android. Reemplace ":" (puntos dobles) con "," comas en el código.
Y debe cambiar la dirección en el código: 20: 15: 09: 15: 17: 82 = 2015.09.151782 Por lo tanto, el módulo HC-05 puede reconocer la dirección.
Control remoto
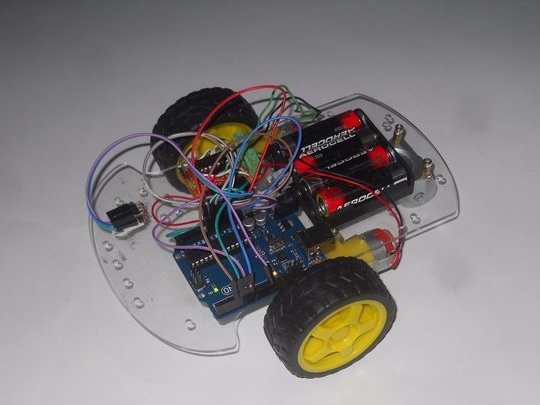
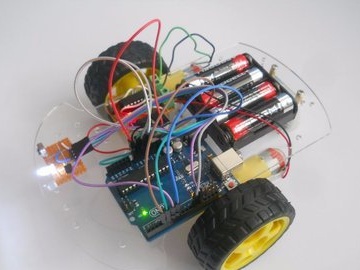
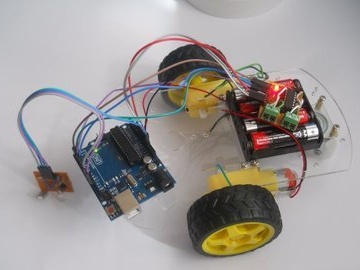
Para crear este robot económico, se utilizó un sensor infrarrojo de 38 kHz, que se utiliza en los controles remotos de televisión.
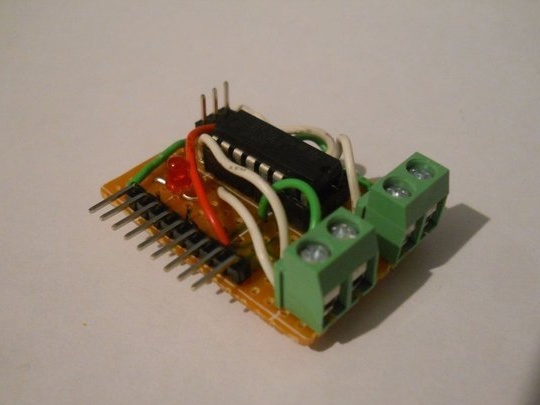
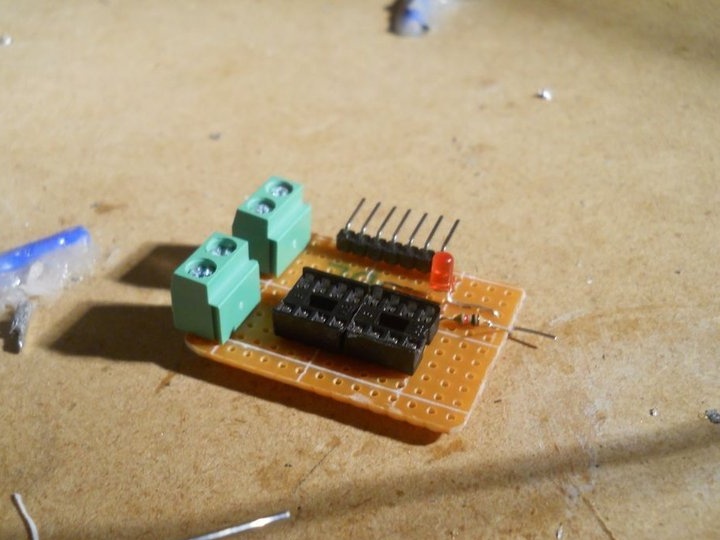
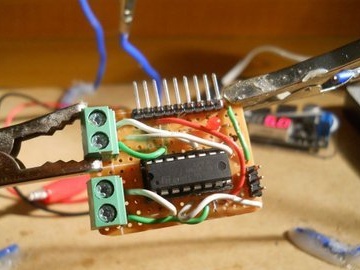
Conductor del motor
Diagrama de conducción del motor: necesitará los siguientes detalles:
2 terminales de tornillo
L293D IC3
Pin de encabezado (90 grados)
Resistencia de 1k
LED rojo
Alambres
Placa de circuito
Usando varios cables de cobre y, siguiendo el diagrama, conecte los pines del microcircuito a los pines del conector. No importa en qué pata del microcircuito a qué clavija del conector, solo recuerde dónde los conectó. El LED está conectado en serie con la resistencia y en paralelo con 5 V VCC.
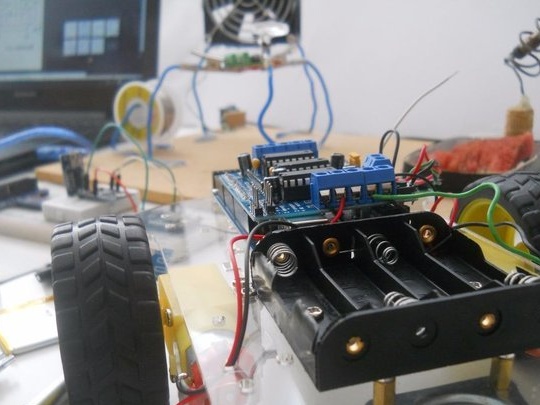
ensamblaje del chasis
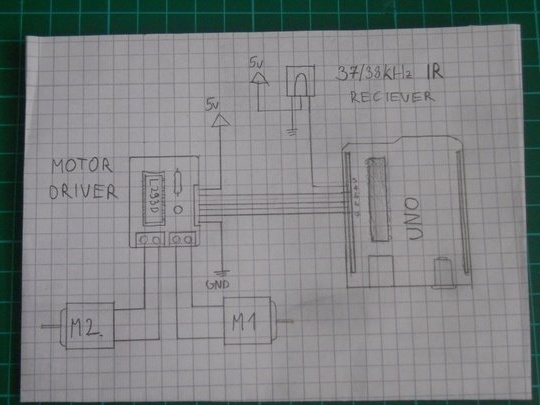
Como controlador de motor eléctrico, se utiliza el chip L293D, que puede controlar dos motores. Mire el diagrama para construir el diagrama.
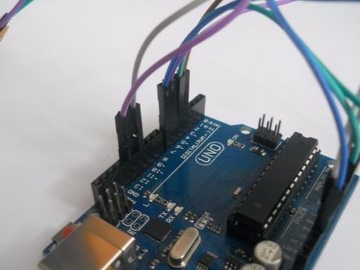
Conecte partes a Arduino
Pin Arduino == & gt; conductor de motor
4 == & gt; 15
5 == & gt; 10
6 == & gt; 7 7
7 == & gt; 2
VIN == & gt; 85v == & gt; 1, 9, 16
GND == & gt; 4, 5, 13, 12
Entonces, mire el diagrama del circuito del módulo L293D, luego conecte sus contactos al Arduino UNO, como se describió anteriormente. El pin 5v Arduino debe estar conectado al pin 1, 9, 16 para activar la función de control del motor del chip. Luego, finalmente use los terminales de tornillo para encender los motores.
La biblioteca utiliza IRremote, un código que lee señales infrarrojas de 38 kHz, las decodifica y luego mueve el robot. (Descargue la biblioteca en la sección "software").
Hay comentarios en el código, pero la conclusión es que decodifica las señales infrarrojas que provienen del servidor principal, luego, dependiendo de lo que el usuario quiera, enciende los motores, después de lo cual el robot se mueve hacia adelante o hacia la izquierda. Descargue el código: "Robot_Code". Descargue esto en su Arduino y su robot estará listo.
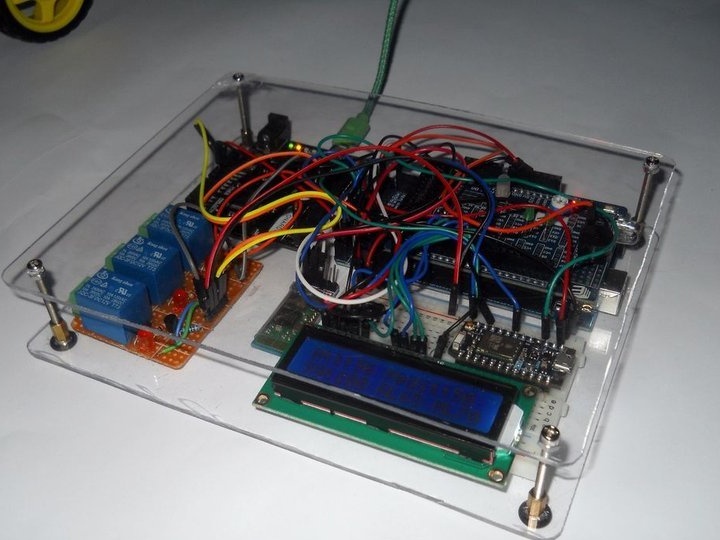
Servidor principal (Arduino Mega, Leonardo, Photon)




El servidor lee los paquetes de datos entrantes de los auriculares inalámbricos. Utilizaremos el módulo BT configurado para proporcionar comunicación entre los auriculares y el servidor. Arduino Mega es el cerebro de todo el circuito, todo está conectado a este microcontrolador: Bluetooth, transmisor de infrarrojos LED, servidor web y controlador de mouse. El código es un poco complicado, pero, por regla general, tiene comentarios que entender.
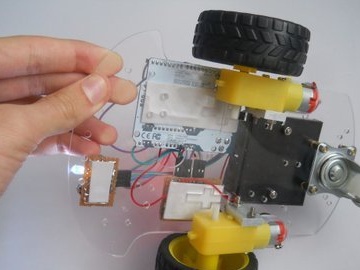
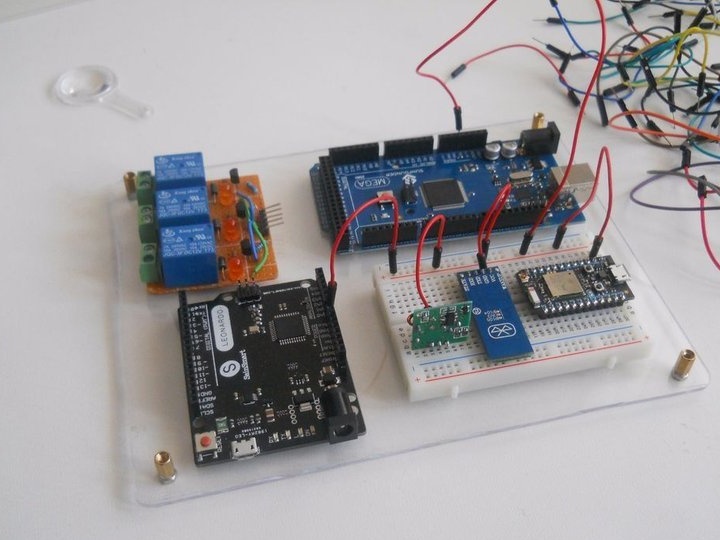
Vivienda
Todo es simple Dos placas de plexiglás de 18x15 cm, alise los bordes con papel de lija. Varios tornillos para conectarlos entre sí.
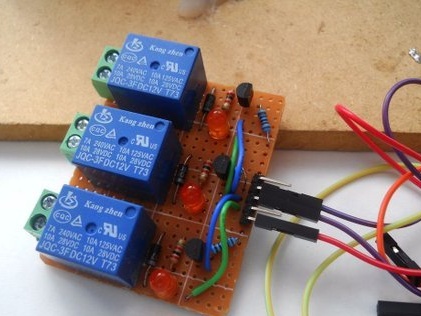
Placa de relé
Necesitará los siguientes detalles:
Transistor 2n2222 (3 piezas)
diodos de germanio (3 piezas)
Resistencias de 330 ohmios (3 piezas)
Resistencias de 1 kOhm (3 piezas)
Relé 5 V (3 piezas)
conectores pin
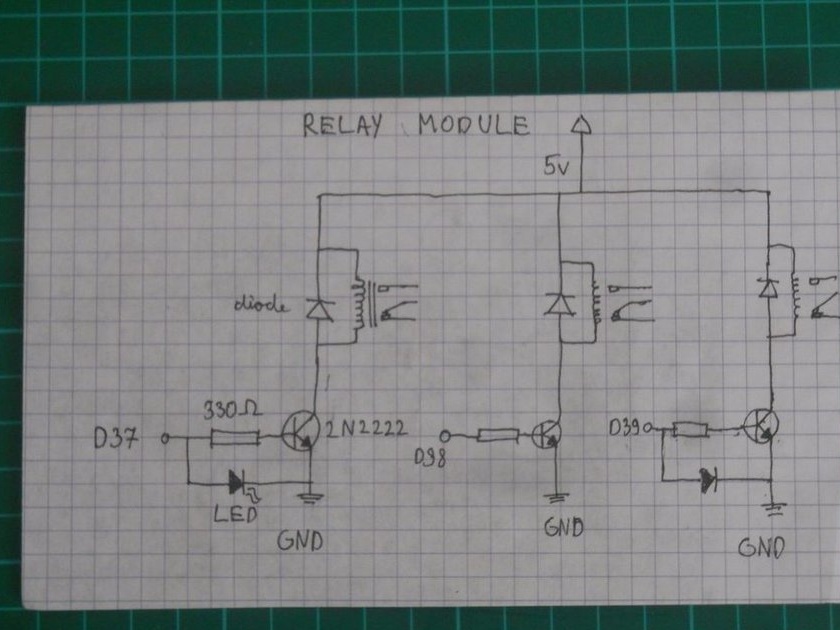
Placa de circuito
Una imagen vale más que mil palabras, así que mire el diagrama de cómo conectar partes en una placa de circuito impreso.
Si la salida "Señal" es de un Arduino, el relé se encenderá. El transistor amplifica la señal para proporcionar suficiente potencia para el relé. Utilizaremos 37-38-39 contactos para controlar los niveles ALTO BAJO de cada relé.
Para instalar piezas en una caja de plexiglás, el autor usó cinta de doble cara. Él prácticamente tiene los detalles.
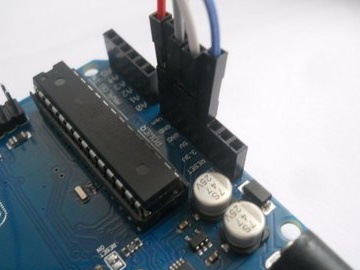
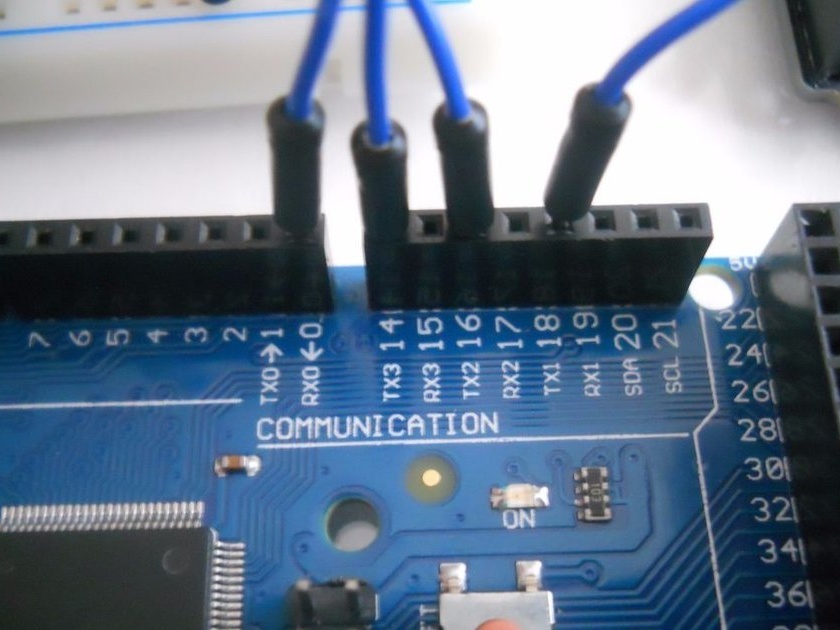
Este es un servidor de software, por lo que hacer un circuito no es tan difícil. Solo necesita encender los microcontroladores y establecer una conexión entre ellos. El LED IR está conectado al pin D3, y el relé está conectado al 37-38-39. El D16 Arduino Mega va al RX Photon y el D18 al RX Leonardo.
Conexión robot
[2.02 Kb] (descargas: 14)
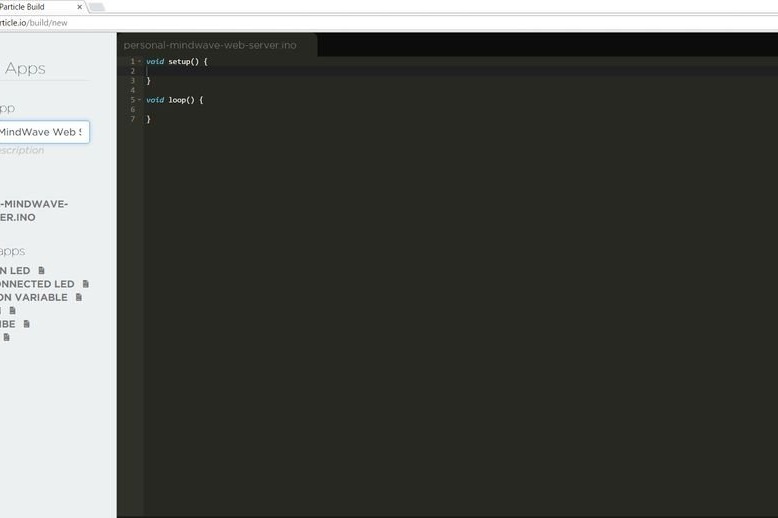
Pero ahora el código está listo y funcionando, así que solo tiene que descargar sus microcontroladores. Descargue el archivo .ino o copie / pegue el código en su IDE y úselo. El código para Particle Photon debe descargarse a través del IDE del navegador. Para hacer esto, regístrese en. Y conecte su computadora portátil a su microcontrolador. Todo sucede casi automáticamente, solo agregue su ID de dispositivo.
Antes de descargar los códigos, asegúrese de que nada esté conectado a los pines RX / TX. Así que desconecte su módulo Bluetooth de Mega y desconecte Mega de Leonardo y Photon.
[489 b] (descargas: 15)

Servidor webPara agregar la función IoT (Internet de las cosas) a su proyecto, el autor creó un registrador de datos en línea utilizando Particle Photon. Dependiendo de lo que haga con el dispositivo, Photon crea un servidor personal y escribe datos en la nube.Esto puede parecer intimidante al principio, pero imagina que puedes determinar si estás estresado (los niveles de atención aumentan y disminuyen rápidamente) o vale la pena ir a dormir
(el nivel de meditación siempre es superior a 80)
. Este servidor web puede ayudarlo a vivir de manera más saludable.
Codificación del navegador
Particle también tiene un panel en línea donde puede publicar cualquier información usando "Particle.publish ();" sintaxis Los desarrolladores de la barra de herramientas han ahorrado mucho tiempo para los usuarios.
