
Buen día a todos queridos amigos! En el artículo de hoy, me gustaría mostrarte una idea bastante interesante hecho en casa, que puede hacer casi cualquier persona que haya hecho al menos un poco costura y quien sabe un poco sobre Arduino.
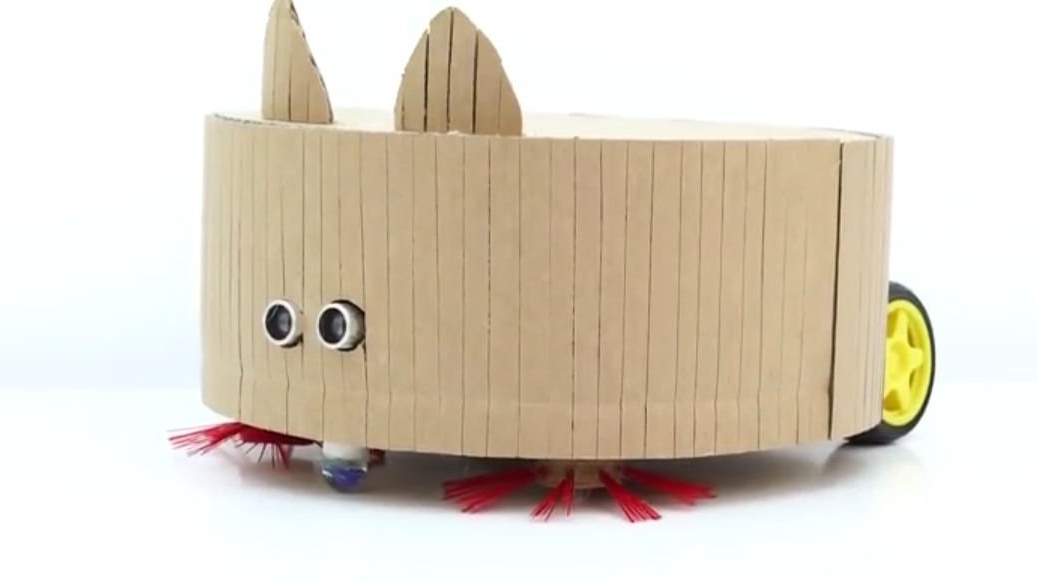
En general, hoy haremos simples robots aspiradora de cartón hazlo tu mismo. Pero dime, porque ya te dije cómo hacer un robot limpiador tú mismo, y tendrás razón, pero este robot aspirador es mucho más simple, más barato y más conveniente que el anterior. Si y esto el modelo modificado y se ve mejor, y también tiene automatización completa a bordo. Este embarcaciones, no solo ayudará a pasar el tiempo, sino que también se convertirá en un asistente indispensable en su hogar o taller. En resumen, la cosa es útil y no complicada.
Pues bien, suficiente del largo prefacio, ¡vamos!
Y así, para este producto casero necesitamos:
cartón corrugado (mucho cartón)
-
cables de conexión
-
-
-Ruedas para motorreductores
-controlador de controladores para Arduino (el autor del producto casero usa un controlador modelo, que solo necesita insertar en el arduino para conectar, pero puede usar un controlador que sea conveniente para usted, lo principal es que el voltaje coincide con los motores de engranajes)
-
-tapas de botellas de plástico
- cerdas de una escoba
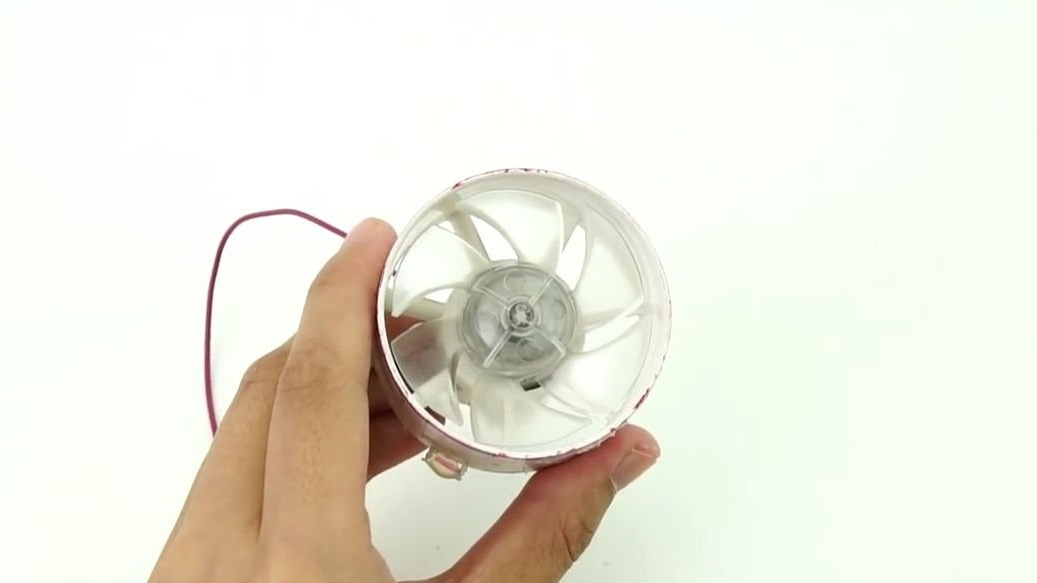
-motor con ventilador de turbina, en principio, puede hacerlo usted mismo
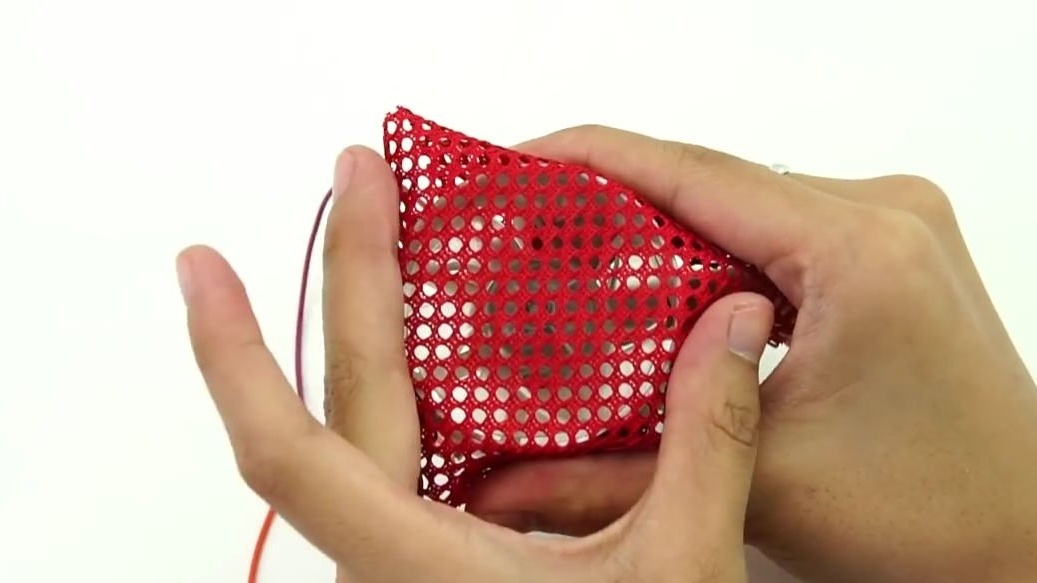
malla plastica
- recipiente pequeño
caja para dos baterías 18650
-
De las herramientas también necesitaremos:
soldador
pistola de pegamento
cuchillo de oficina
línea
- lápices o marcadores
El primer paso es tomar una hoja grande de cartón, una regla y una brújula. Medimos 13 cm con una brújula y dibujamos un círculo en cartón, después de lo cual lo recortamos, en total necesitamos dos de estos círculos:


Luego cortamos un rectángulo de pequeño tamaño del mismo cartón. Tomamos una regla y un lápiz, con un lápiz dibujamos un cartón con un intervalo de aproximadamente 1 cm. Después de este procedimiento, tomamos un cuchillo de oficina y hacemos pequeños cortes de la capa superior de cartón, sin tocar el fondo. Esto es necesario para que el cartón se vuelva más elástico:

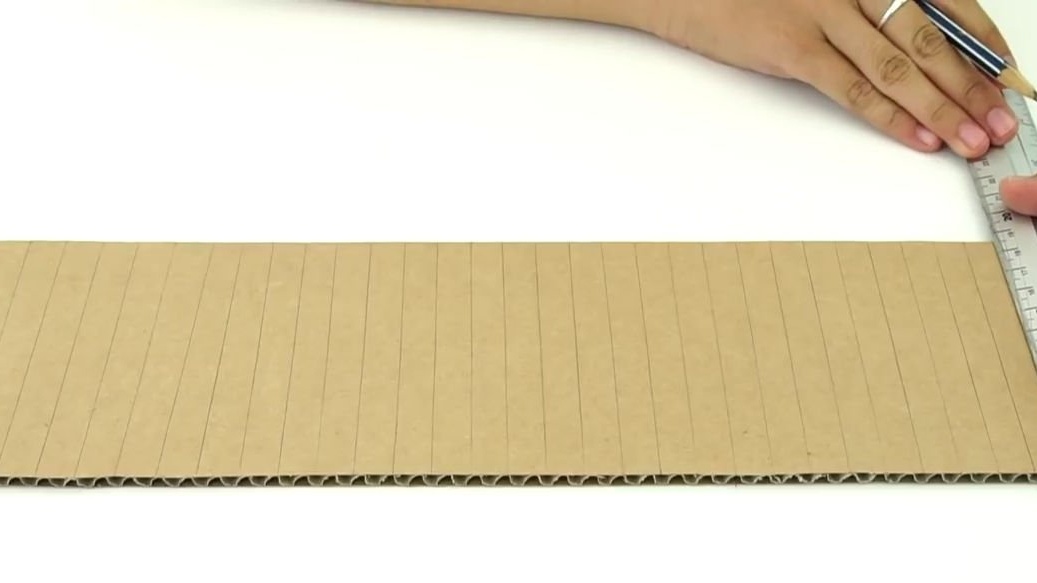


Enrollamos la pieza de trabajo temprana hecha alrededor de uno de los círculos de cartón y, por supuesto, la pegamos con pegamento caliente:

Tratemos con la electrónica y la parte mecánica.
Para comenzar, tome el motorreductor y ponga una rueda sobre él, hacemos lo mismo con el segundo motor:

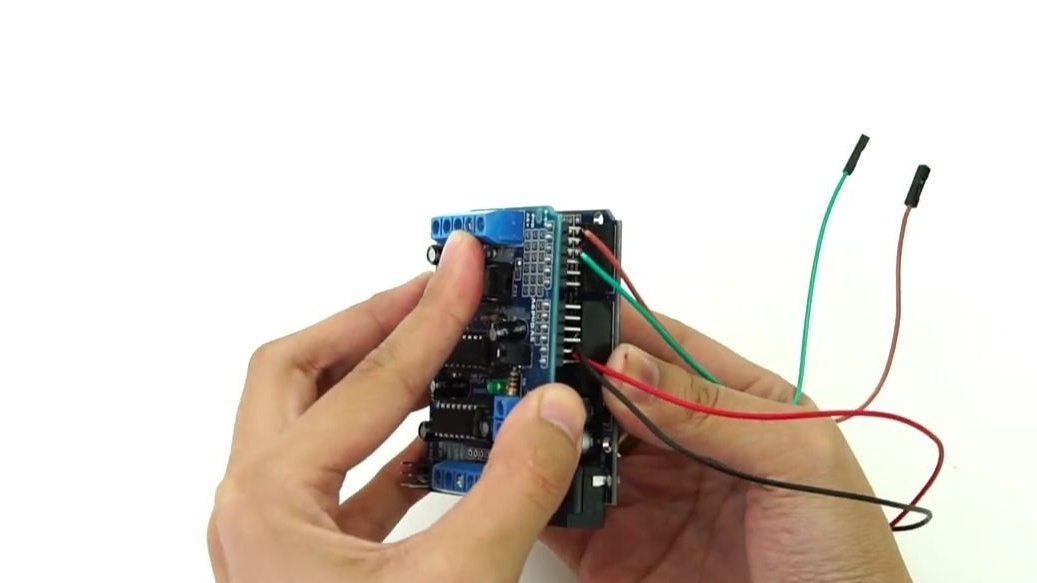
Luego tomamos la placa Arduino Uno y los cables de conexión, que a su vez deben conectarse a ciertos pines (contactos) en la placa. Para mayor comodidad, tomamos diferentes colores: conectamos el rojo a 5 voltios, el negro a GND y los otros dos o dos pines diferentes. A qué pines conectar los cables, debe averiguarlo inmediatamente sobre la base del código, o escribir los pines a los que están conectados sus cables. En general, no hay nada complicado aquí, conectamos:

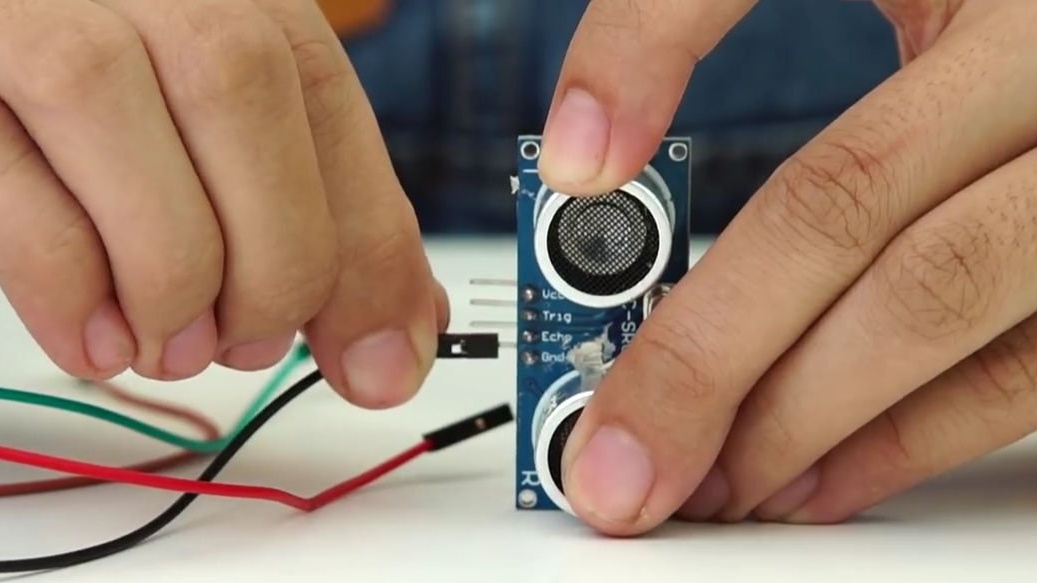
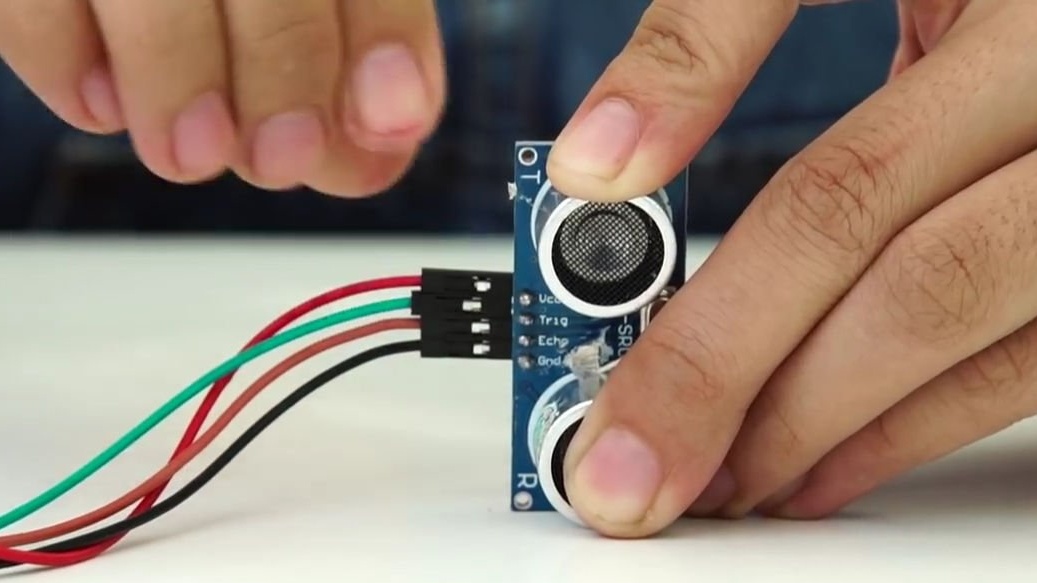
Conectamos el lado opuesto de los cables al buscador de rango ultrasónico como se muestra en la foto a continuación, si no está claro, puede ver el video del autor.
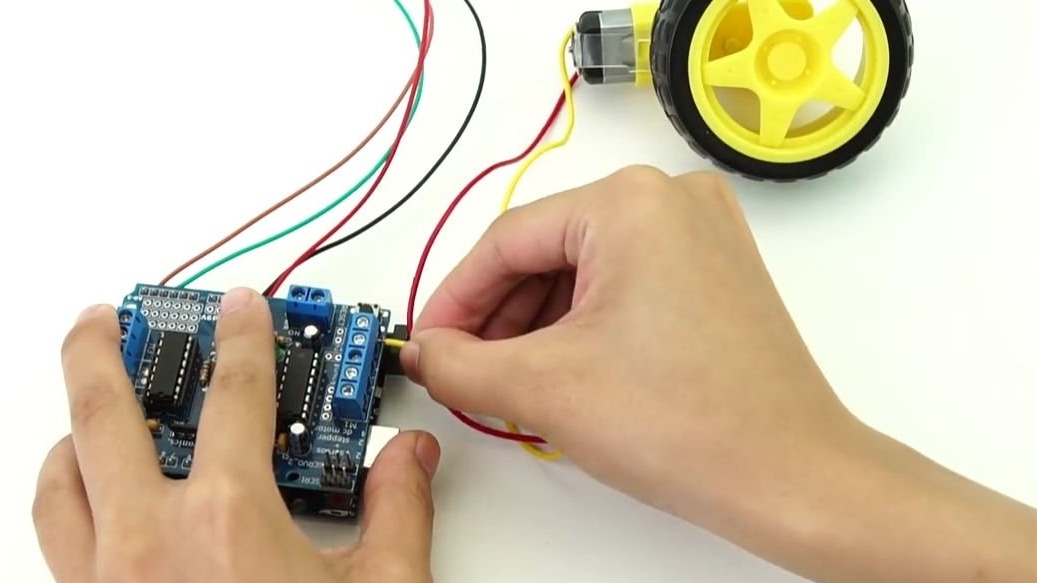
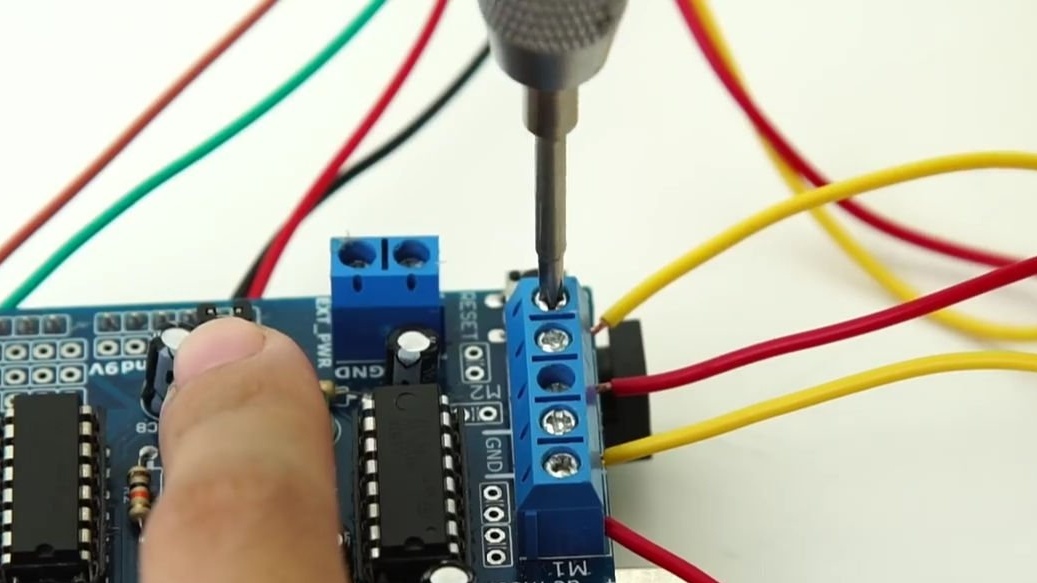
Conectamos los motores de engranajes al controlador del motor, ni siquiera necesita soldar nada, simplemente insértelo en las abrazaderas y listo:

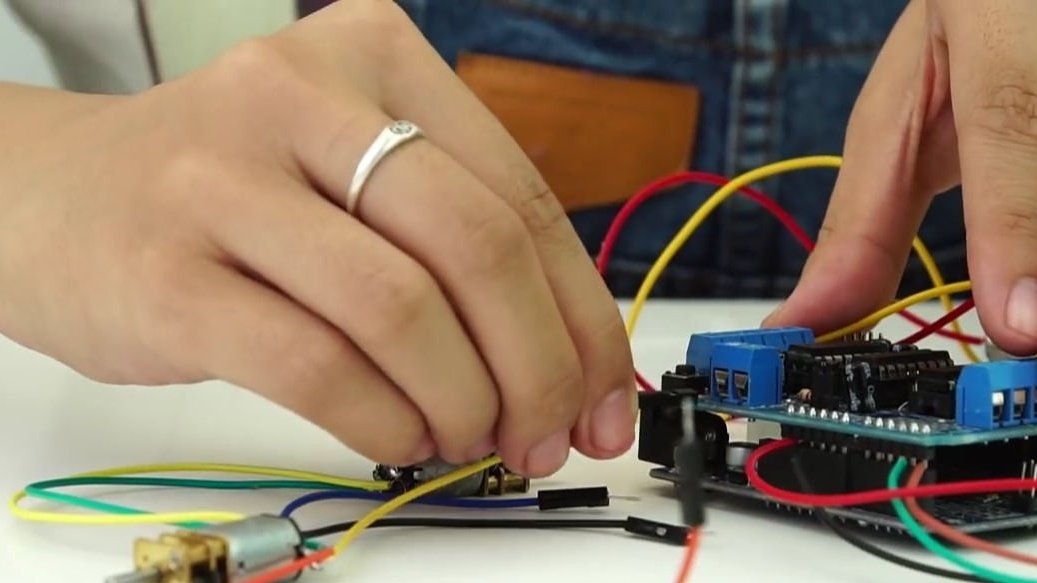
Es necesario soldar los cables de conexión a los mini motores, con la ayuda de los cuales conectaremos estos mismos motores al controlador del motor. En general, conectamos:
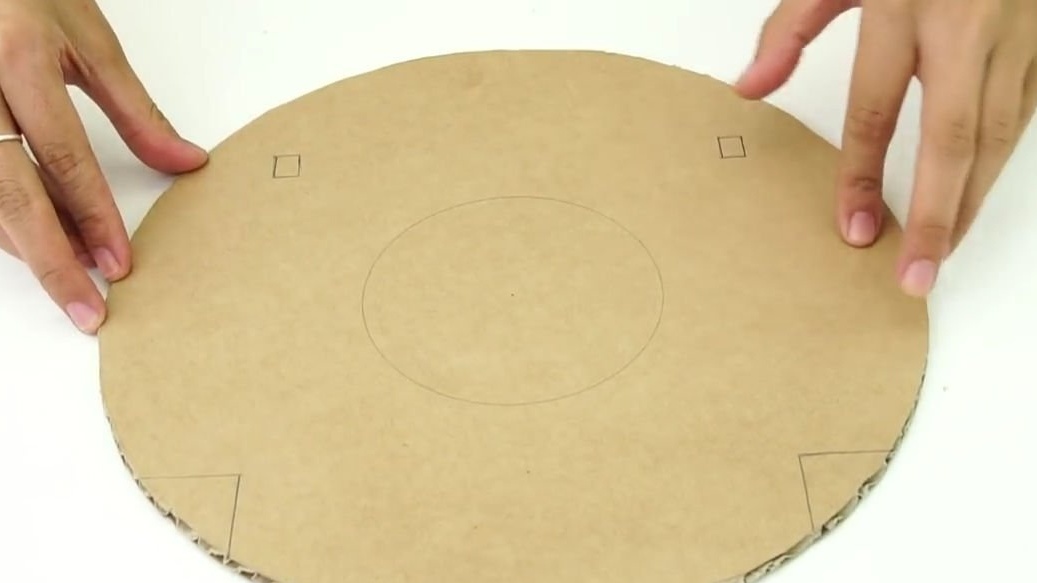
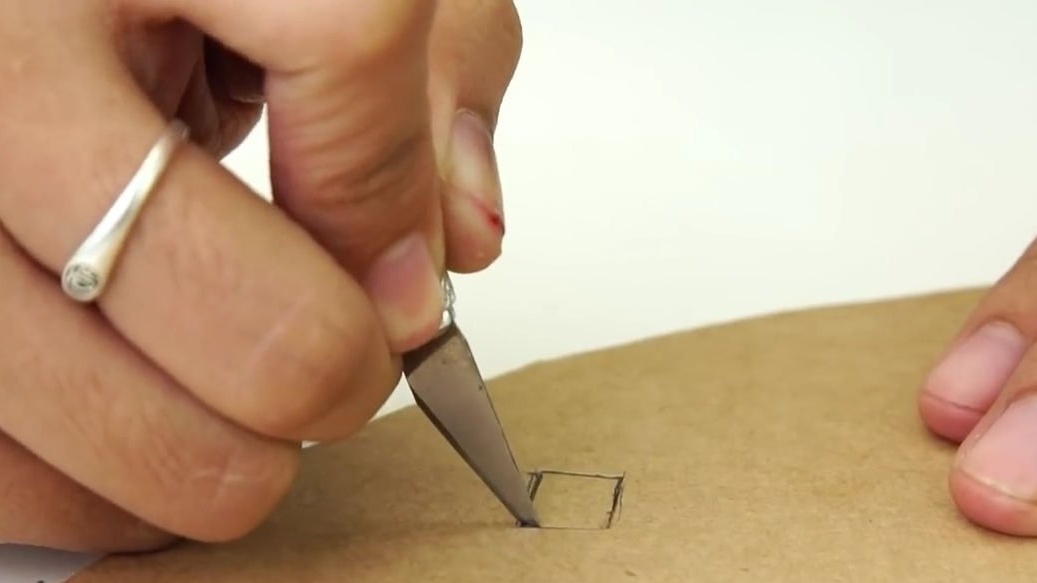
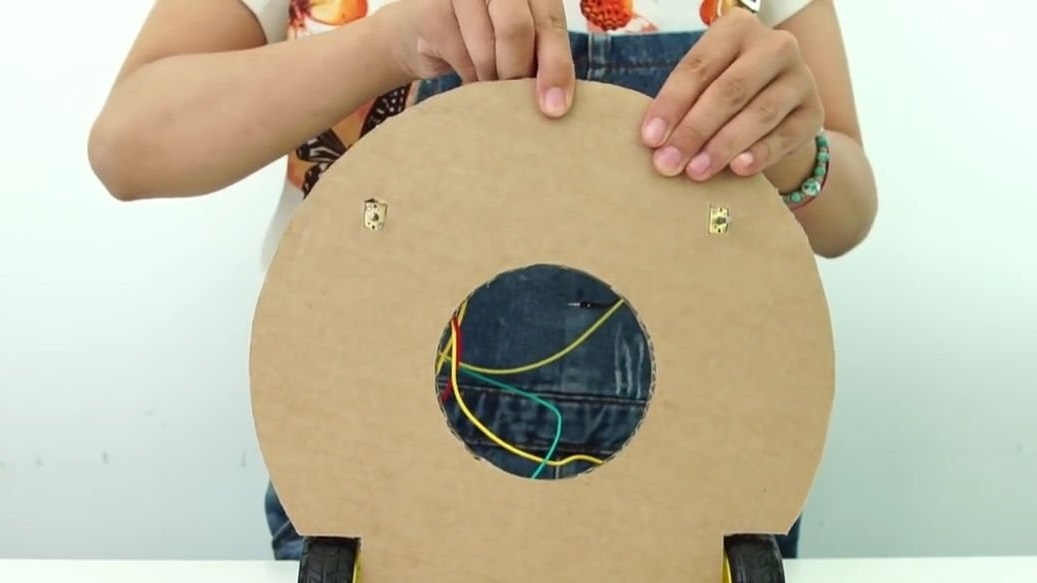
Ahora tomamos el círculo de cartón restante, que se hizo desde el principio. En él, debe dibujar otro círculo en el centro y varios rectángulos. Puedes ver todo el marcado en la foto a continuación. Luego cortamos los agujeros marcados, debería ser igual que en la foto de abajo:

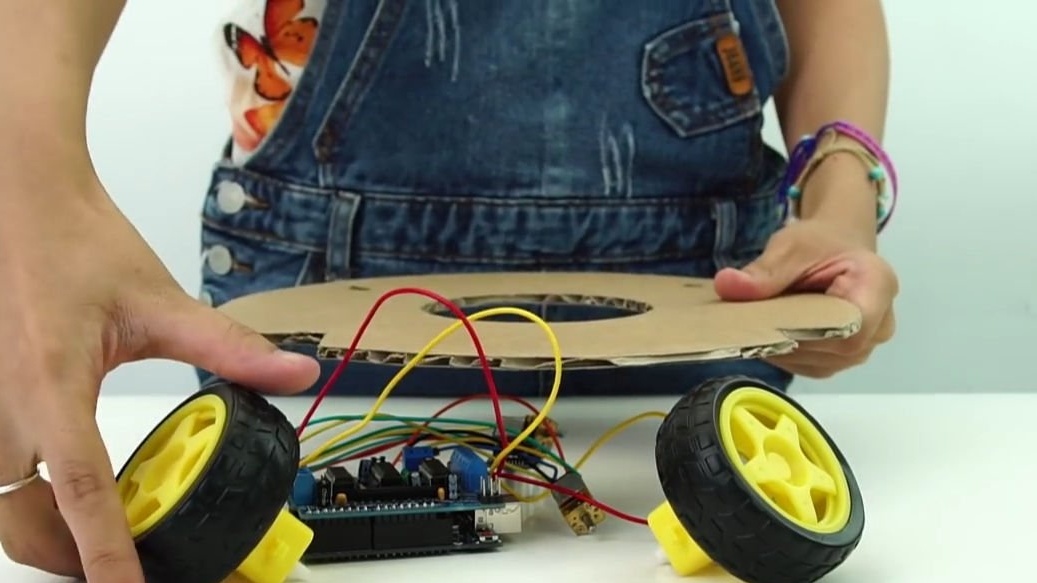
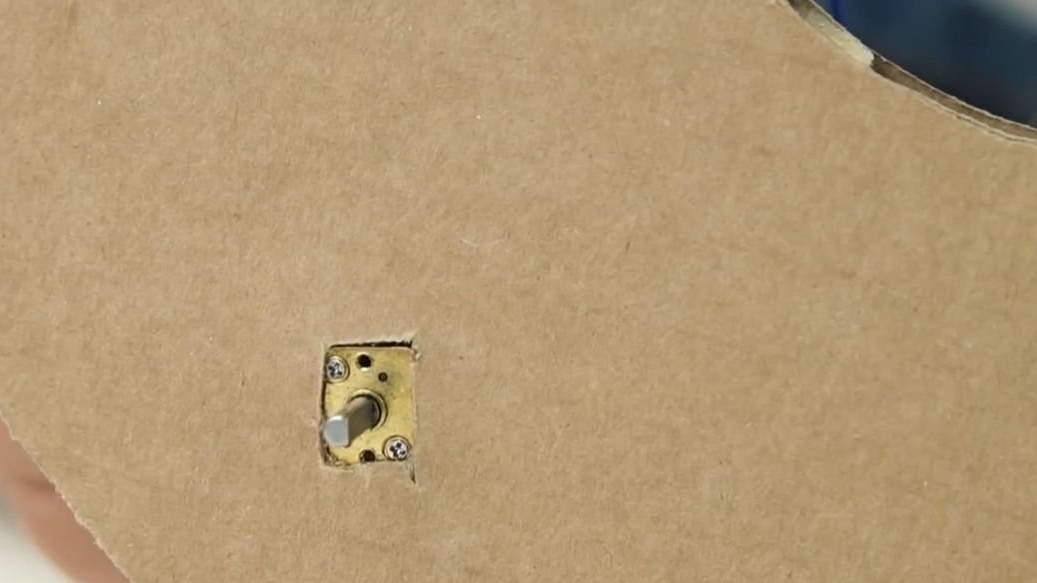
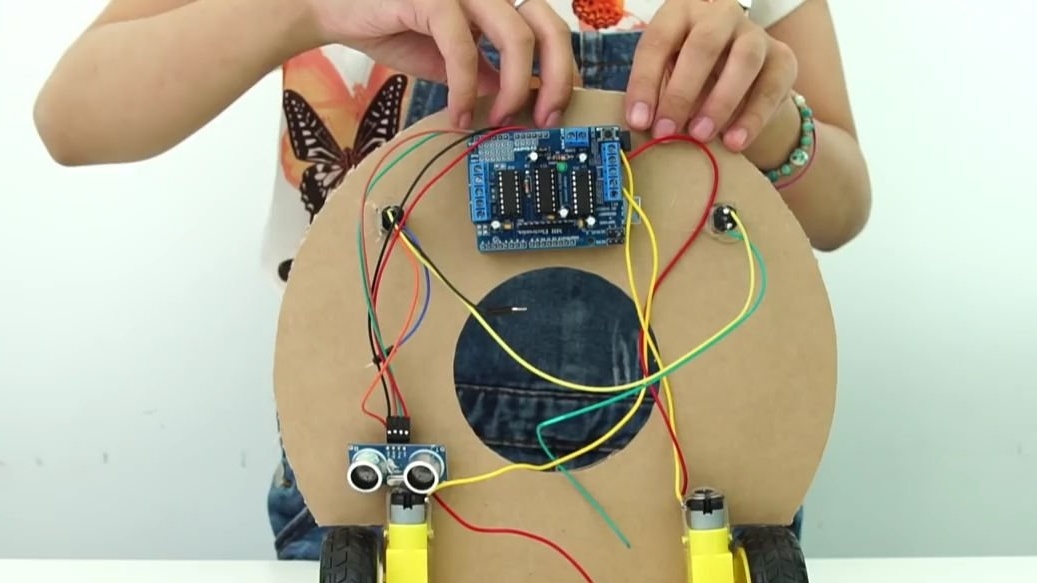
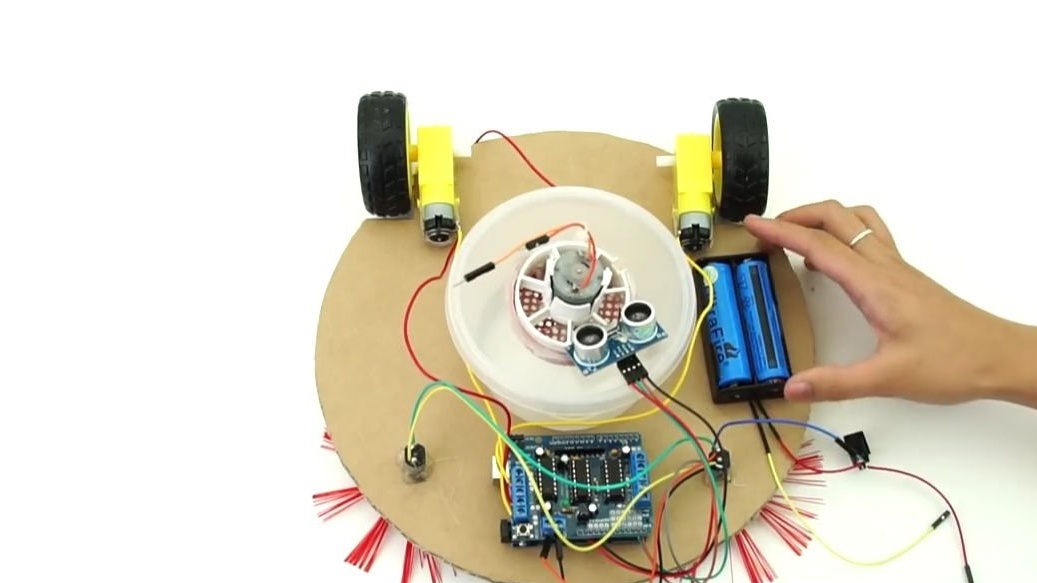
Toma todo electrónica y colóquelo en un círculo de cartón previamente hecho. Insertamos motores pequeños en los orificios rectangulares ranurados, y sujetamos el resto de la electrónica al adhesivo termofusible, conectamos motores de engranajes grandes en paralelo a la parte posterior y no tocamos el telémetro ultrasónico:

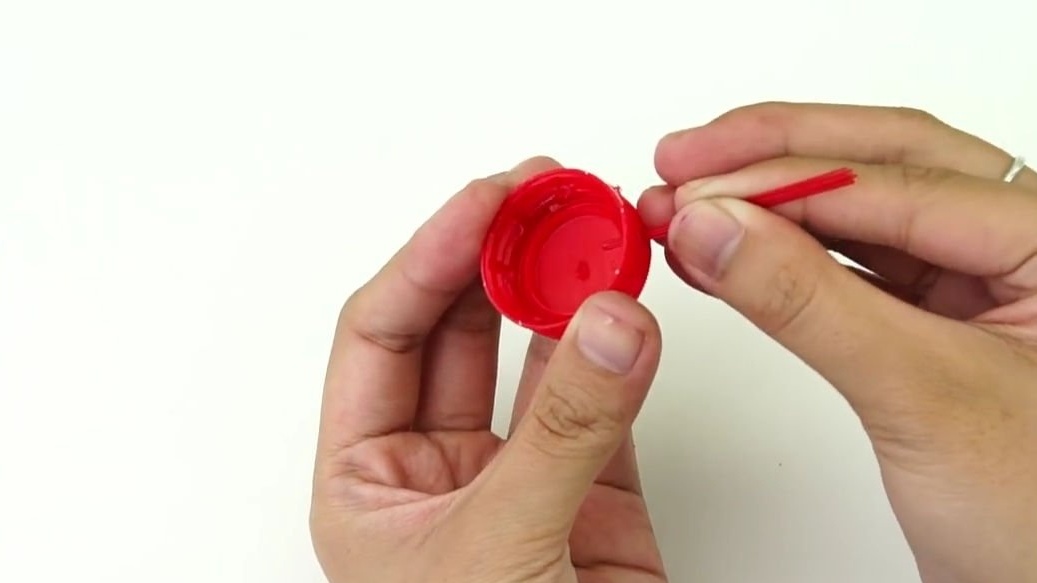
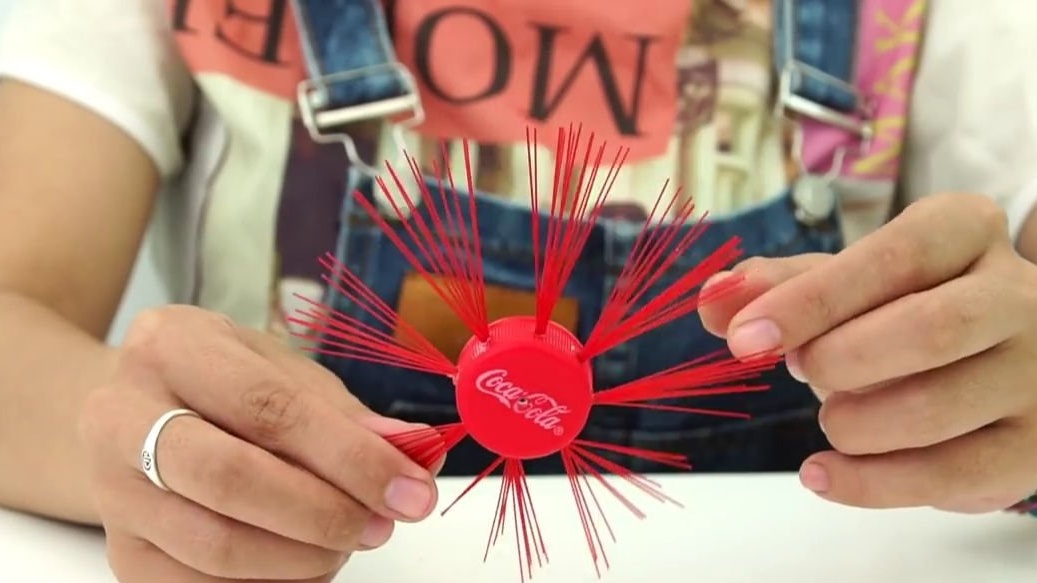
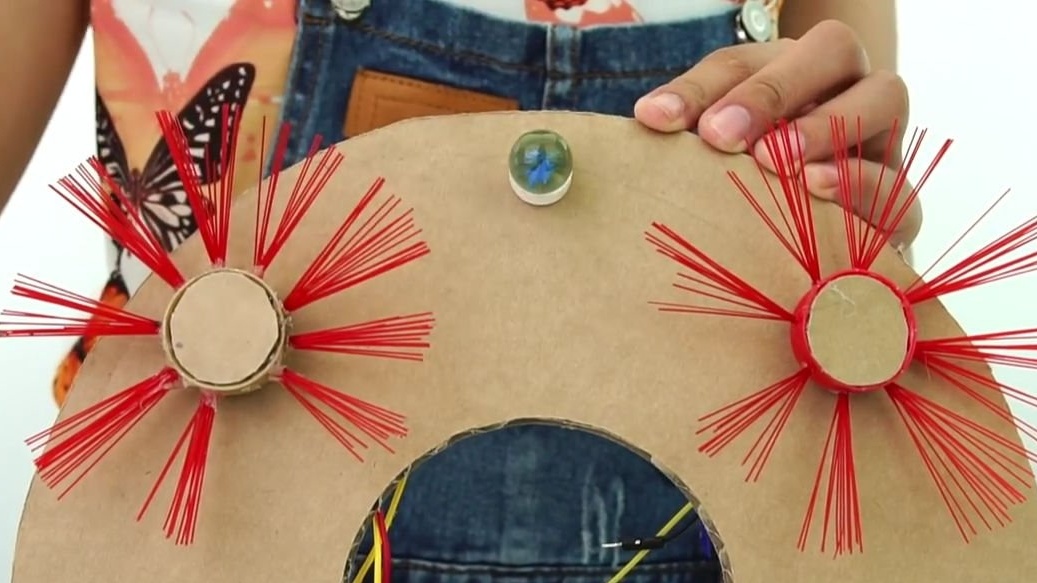
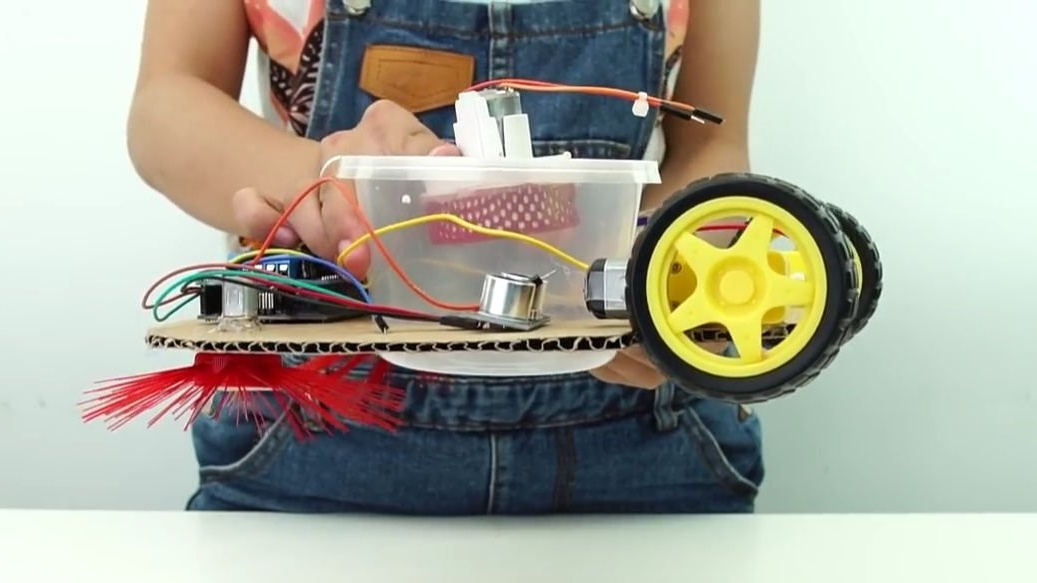
Quitamos las tapas de las botellas de plástico, solo necesitamos dos piezas. Usando un soldador, un clavo caliente o un punzón, hacemos agujeros: uno en el centro de la tapa y el otro en los lados con una muesca de aproximadamente 1 cm. En los agujeros hechos a los lados, sacamos las cerdas preparadas previamente de la escoba, deben ser del mismo tamaño. Arreglamos estas cerdas con pegamento caliente. En total, se deben hacer dos espacios en blanco.
Los pegamos en el eje de pequeños motores, que se encuentran en un círculo de cartón. Pegamos nuevamente con pegamento caliente:


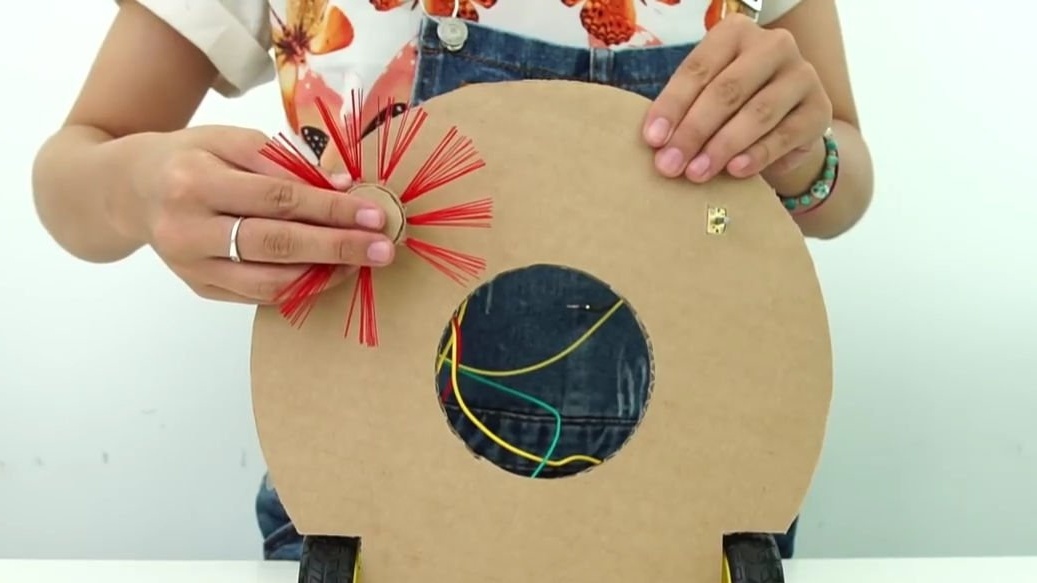

En la parte delantera, entre dos cepillos, pegue una bola pequeña o una rueda pequeña que pueda girar alrededor de su eje:
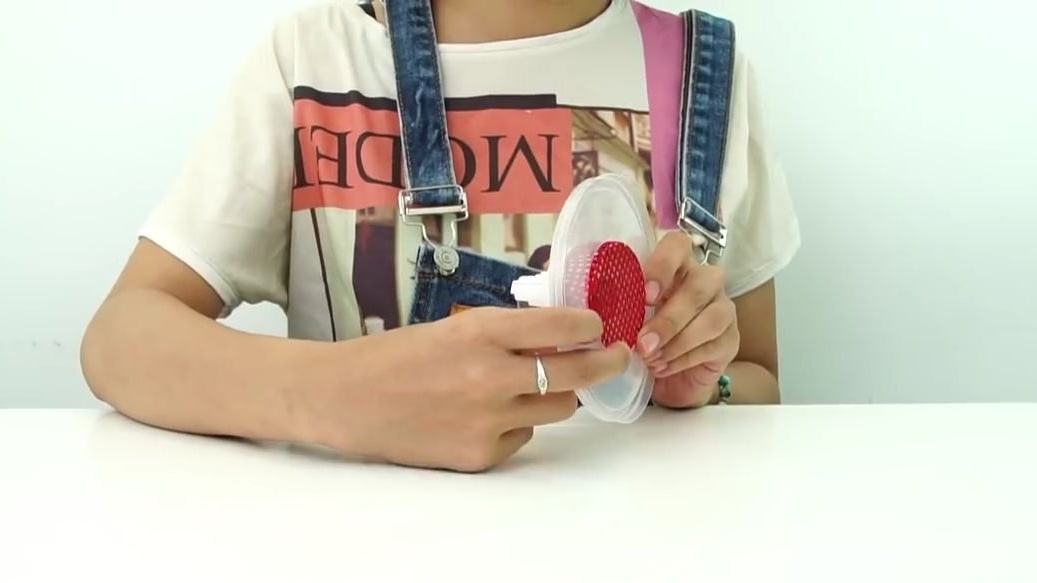
Ahora necesitamos un motor eléctrico con una turbina que pueda aspirar aire y, en general, puede surgir un enfriador muy potente. Ponemos y arreglamos una malla de plástico en la parte delantera de la turbina, es necesaria para proteger la turbina, es decir, para evitar que entren y se filtren grandes desechos. Retire la tapa del recipiente de plástico. El recipiente debe ser preferiblemente de forma redonda. En la tapa hacemos un agujero redondo y uniforme en el que debes insertar y pegar la turbina con una malla. En el contenedor mismo, hacemos un pequeño agujero rectangular con el borde. Ponemos la tapa con la turbina en el contenedor y listo. La parte de succión del robot está terminada. Quiero recordarles que todo debe hacerse como se muestra en la foto a continuación:



Tomamos la base del robot e instalamos un contenedor con una turbina en el orificio central y pegamos todo firmemente con pegamento caliente. Luego, en el costado de la estructura, instalamos una caja con baterías 18650 y un interruptor conectado a uno de los cables que provienen de la caja. Conectamos nuevos cables para alimentar Arduino, hacemos cortes de pelo finales y podemos continuar.
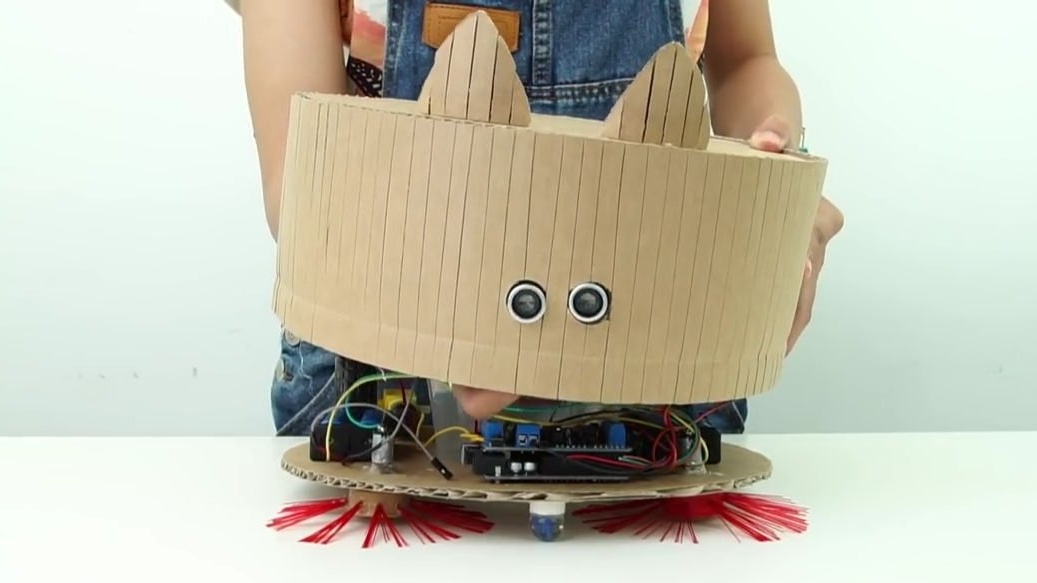
Insertamos el buscador de rango ultrasónico en agujeros especiales que deben hacerse con anticipación en el cuerpo del robot. Este edificio, como recordarán, se hizo al principio. El autor del artículo también agregó elementos decorativos en forma de orejas, y sale un telémetro ultrasónico en lugar del ojo, todo esto se ve muy bien. Ponemos el estuche sobre la base de la estructura y lo arreglamos, pero no mucho, porque en ese caso, necesitará obtener las baterías para cargar.Por supuesto, puede instalar un modelo para cargar baterías directamente en el robot, pero es poco probable que reemplace la carga de alta calidad.
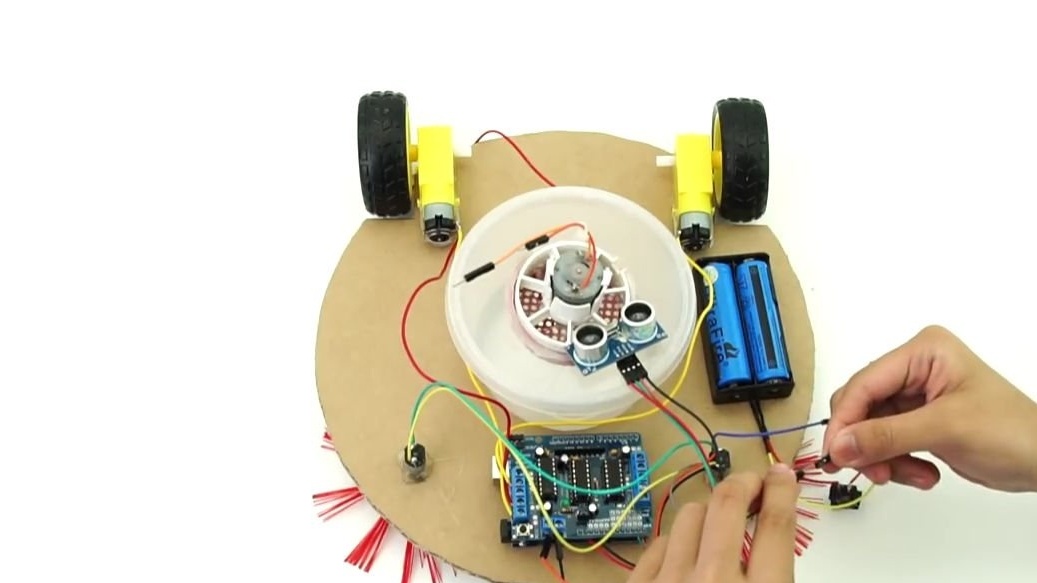

Solo resta cargar el firmware en Arduino, en general, es mejor hacerlo después de conectar todos los componentes electrónicos para verificar el circuito y el código, pero puede hacerlo más tarde. Es mejor escribir un boceto para verter sobre Arduino usted mismo, pero simplemente puede encontrar en Internet un boceto listo para usar con robots con un sensor ultrasónico que viaja alrededor de un obstáculo, el beneficio de estos bocetos ahora está completo. Pero para evitar varias dificultades, es mejor escribir de forma independiente, por sí mismo.
Bueno, eso es todo! ¡Un robot aspirador simple y funcional está listo y solo queda probarlo! Para hacer esto, solo enciéndalo y comience a andar en el piso y aspire toda la basura. El robot se mueve y gira cuando se acerca el obstáculo, y esto es mucho más conveniente que los modelos anteriores.



Aquí hay un video del autor con un ensamblaje detallado y pruebas caseras:
También puede alimentar este robot desde un banco poderoso, puede ver mi revisión detallada para una buena, por supuesto, quién estará interesado en esto:
Bueno, ¡buena suerte a todos en futuros proyectos, amigos!