


En este artículo, el Asistente nos dirá cómo hizo un camarero robótico controlado por un teléfono inteligente.
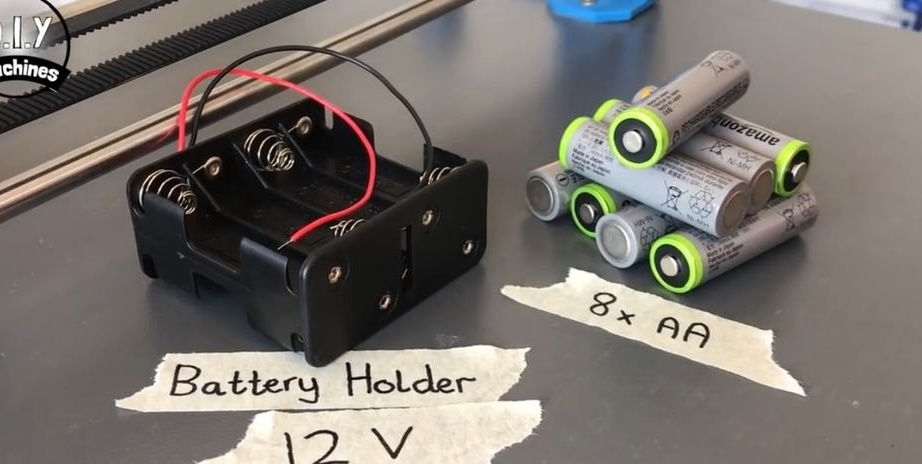
Características del dispositivo: funciona en Arduino, precio asequible, control de bluetooth desde cualquier dispositivo, autonomía (funciona con 8 baterías AA).
Para construir dicho dispositivo, el maestro usó lo siguiente
Materiales y herramientas:
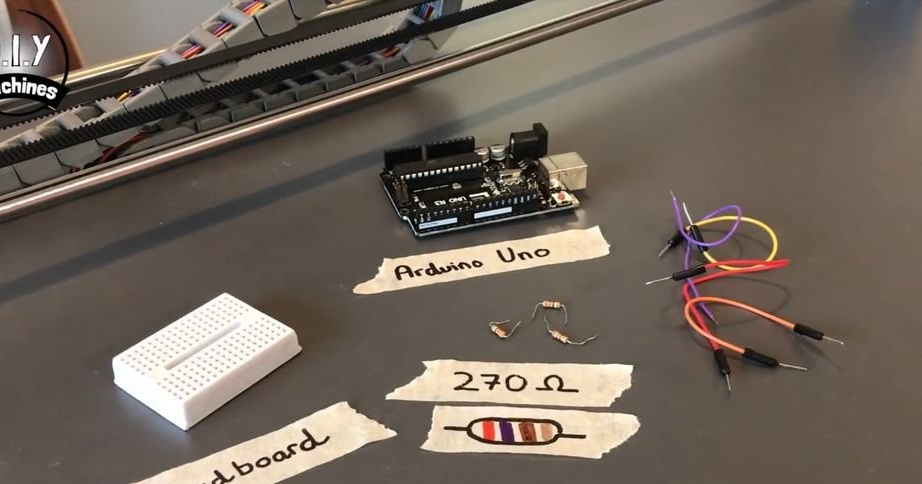
-Arduino Uno;
-Driver motor L293D;
- interruptor de contacto;
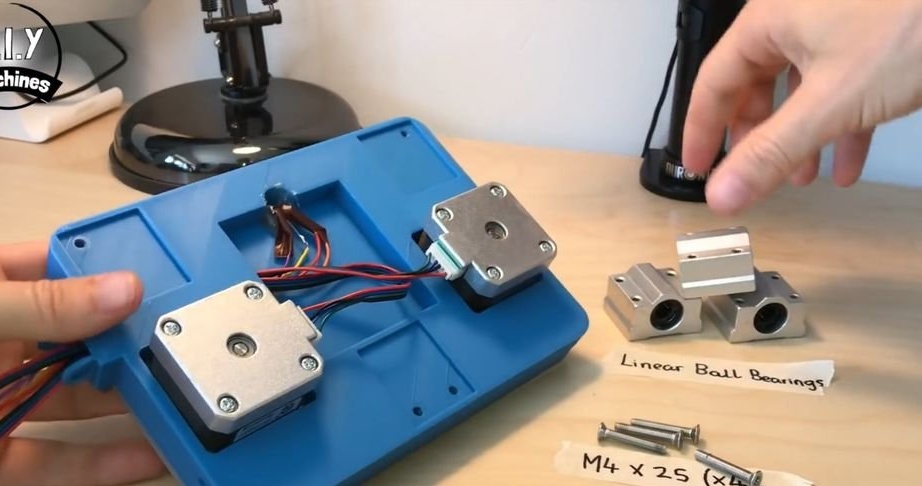
-Rodamientos lineales;
-Motor de paso;
-Cinturón y polea (versión 2m);
-Cinturón y polea (versión 5m);
-Módulo Bluetooth HM10;
-Un destornillador;
-Sujetadores;
-Piernas
-Tabla superior;
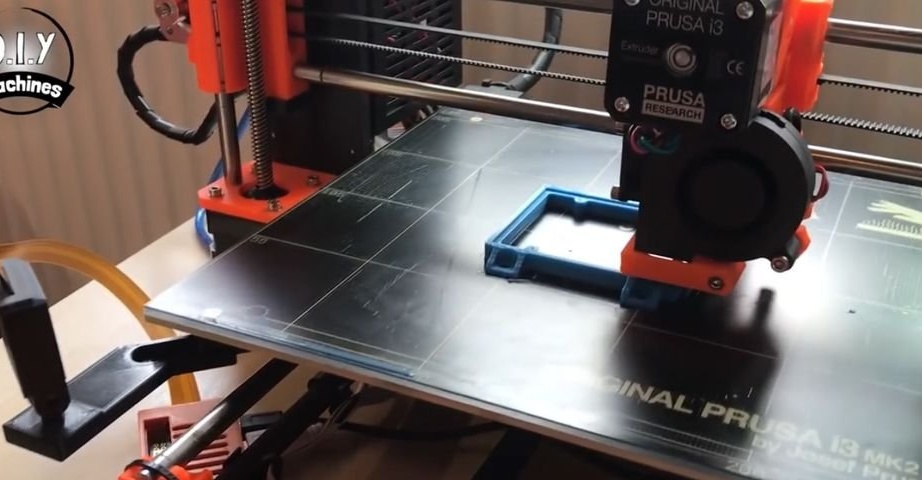
-3D impresora;
-Barras de metal;
- destornillador
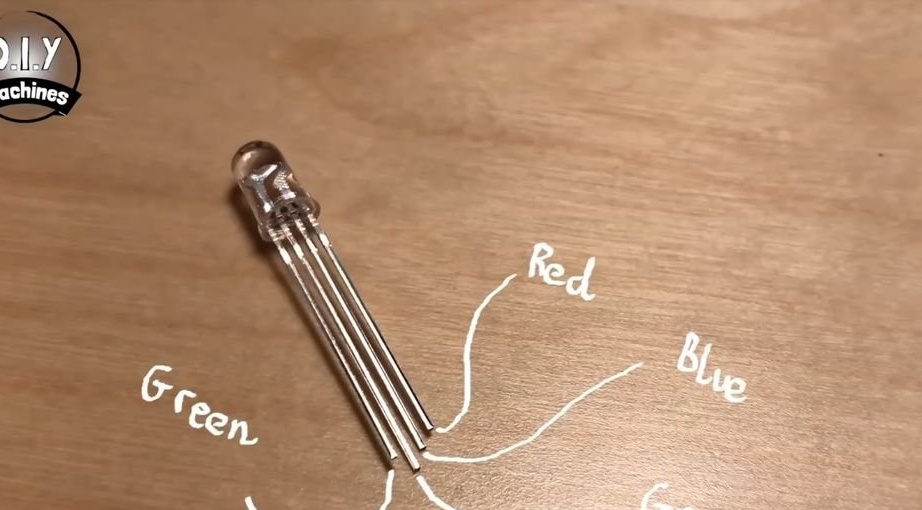
- LED RGB;
-Cable;
-Accesorios para soldar;
Izolenta
-Pistola de pegamento;
-Batería compartimiento;
-Conectores;
-Baterías;
-Ordenador con software;
- Soportes para botellas;
Valvula
-Botellas
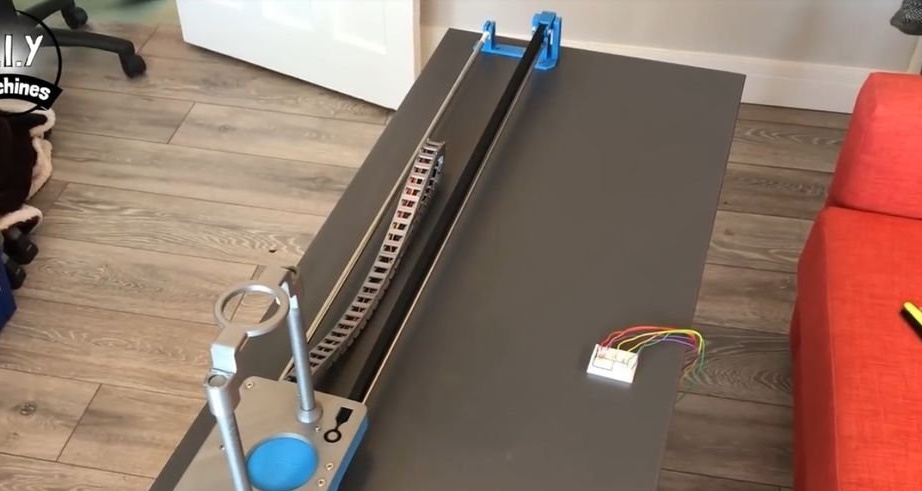
Paso uno: la mesa
Primero, el maestro recoge la mesa. Tamaño de la mesa 120 * 45 cm. Grosor de la mesa 18 mm.


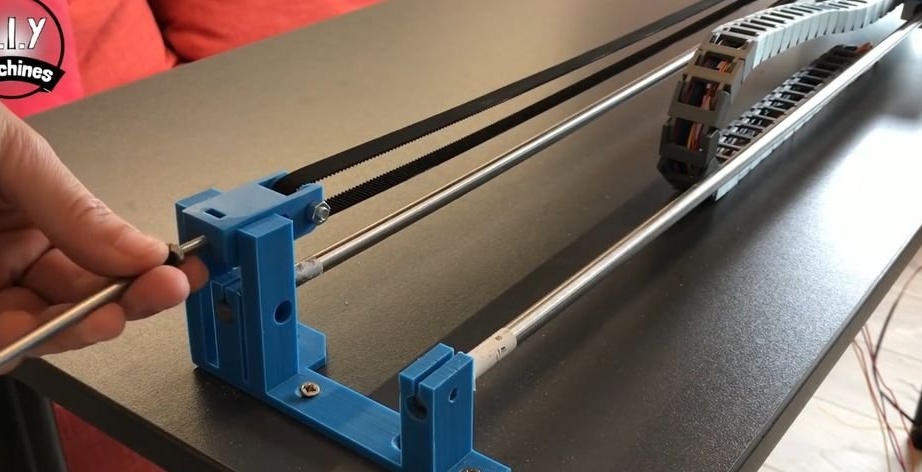
Paso dos: tensor
Los archivos para imprimir partes se pueden descargar a continuación.
Archivos de impresión 3D.
Ahora será necesario imprimir los dos primeros detalles "idler.stl" y "Rod_Clamp_V5.stl".
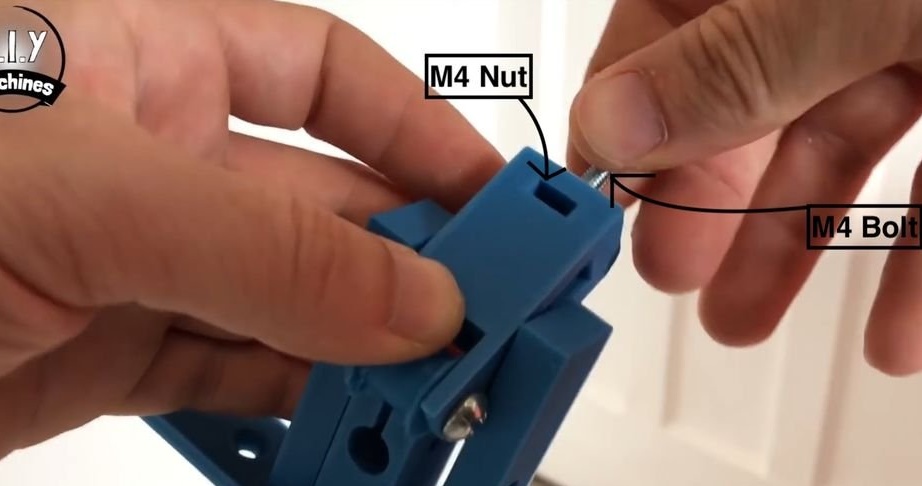
Después de imprimir, es necesario unir el rodillo de tensión a la abrazadera del vástago con un perno M4 y una tuerca largos. No es necesaria una sujeción fuerte, ya que el rodillo debe girar libremente.
Entonces las dos partes se unen.
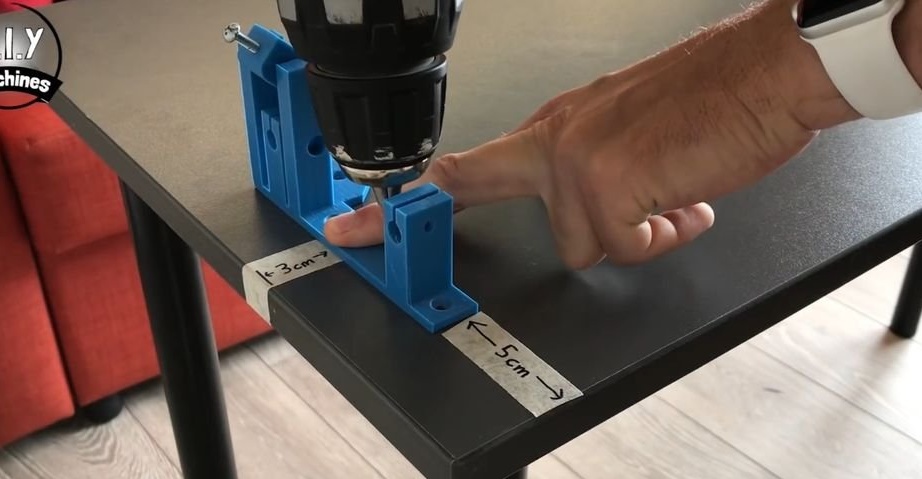
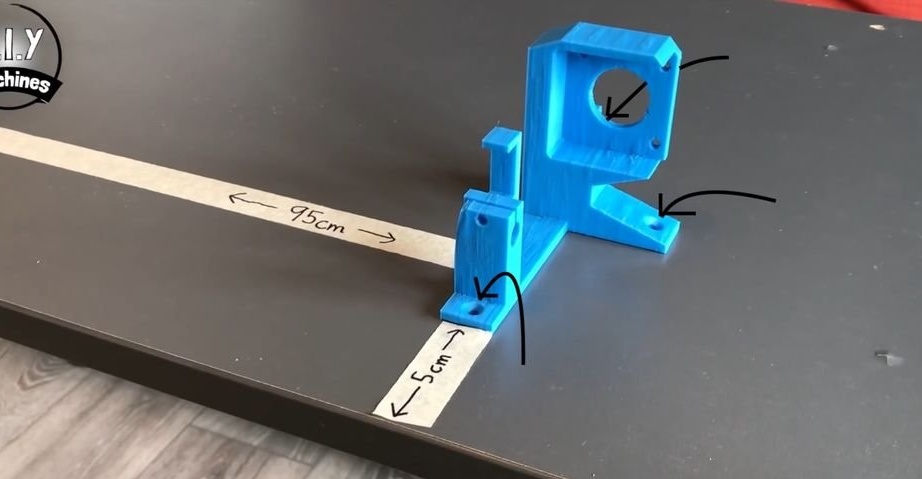
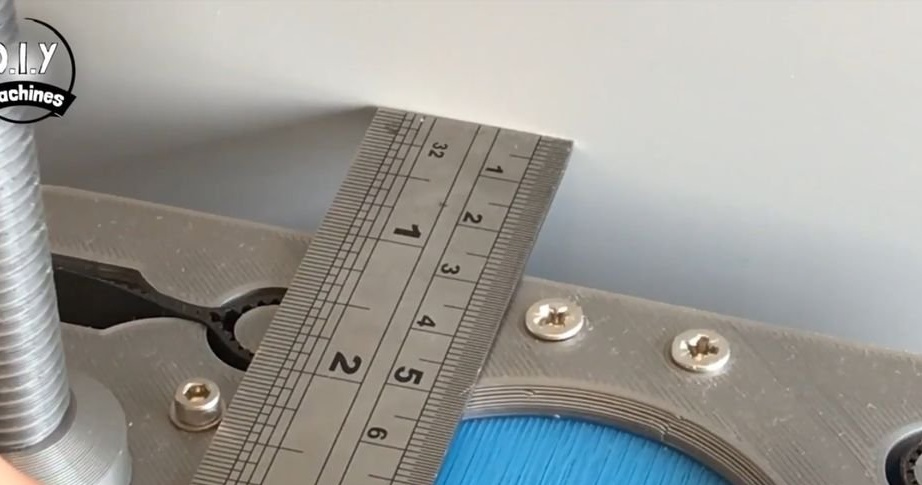
Marca en una mesa a 3 cm del extremo corto izquierdo y a 5 cm del borde delantero y aprieta el tensor.

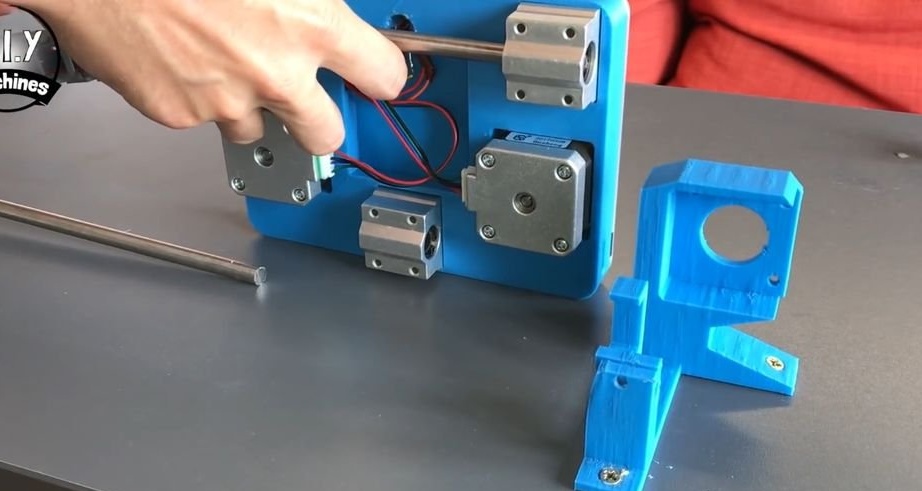
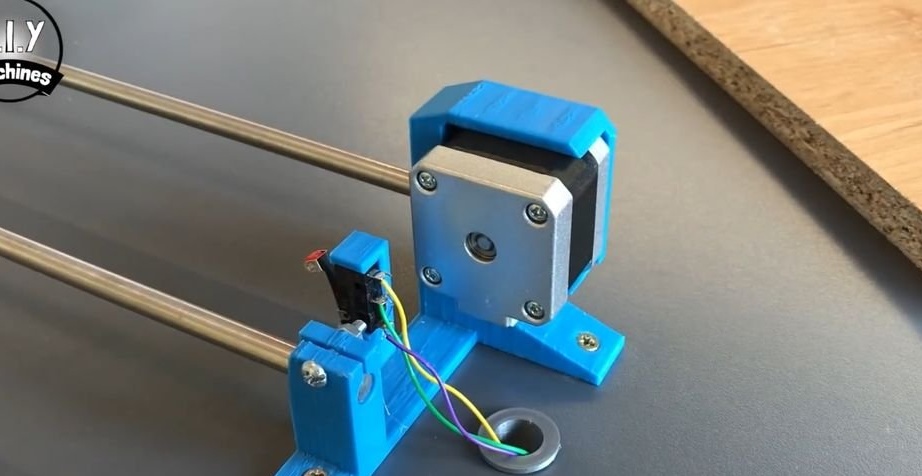
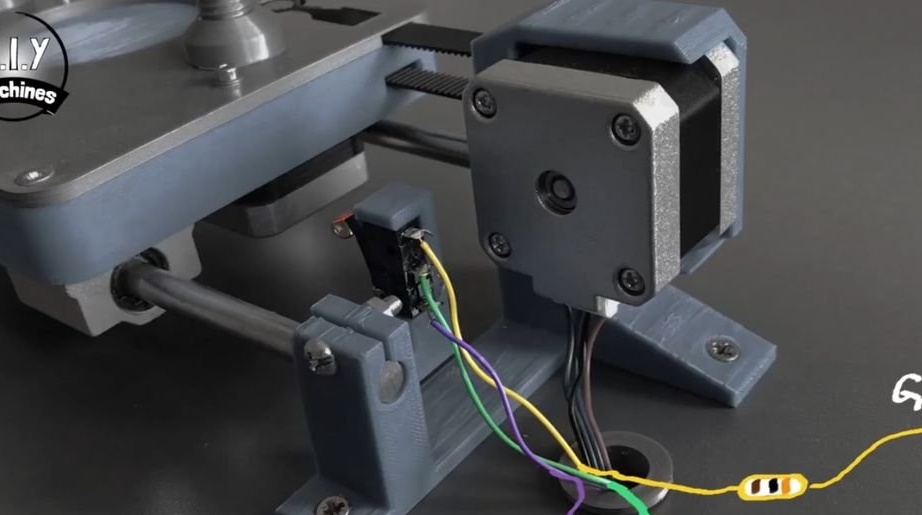
Paso dos: montaje del motor
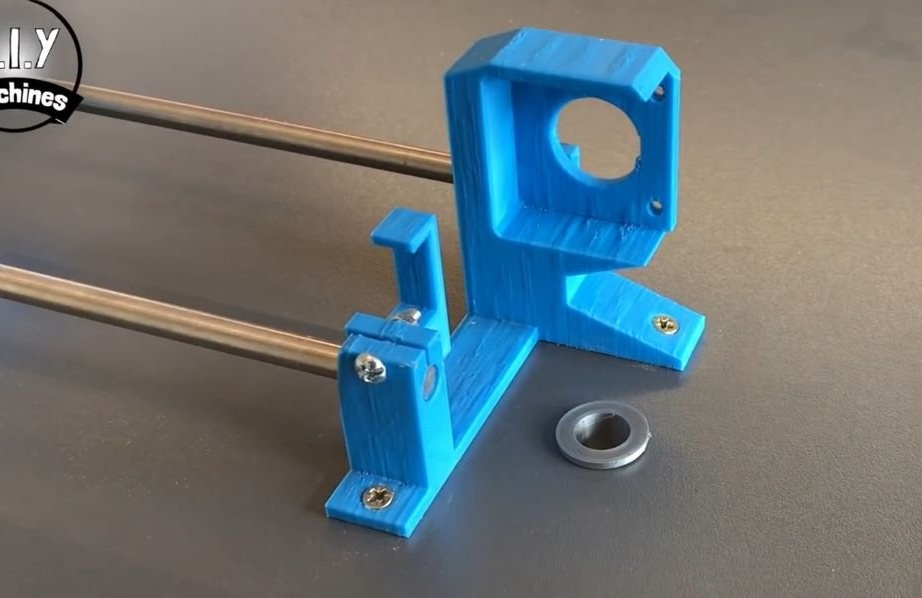
Imprime el soporte del motor, archivo "X_Axis_Motor_Mount.stl". Se sujeta en la mesa a una distancia de 95 cm del tensor y 5 cm del borde de la mesa.
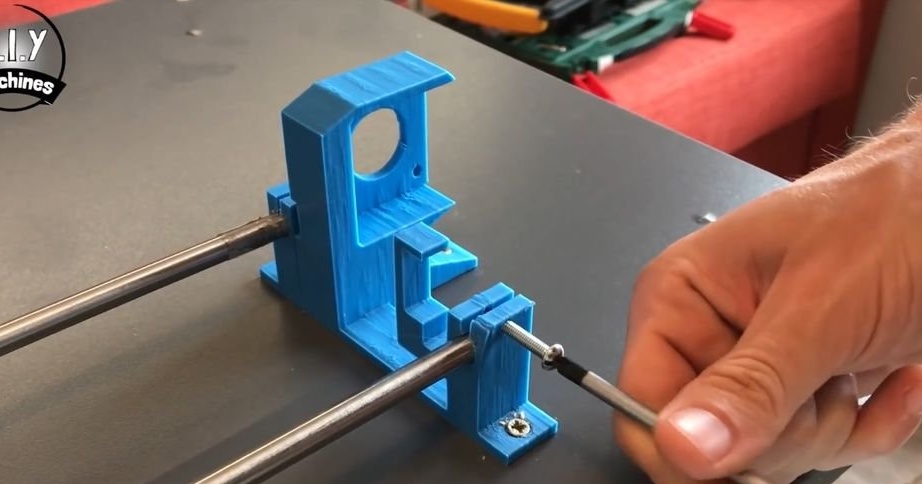
Paso tres: guías
Conjuntos de guías. La longitud de las varillas es de 1 metro.
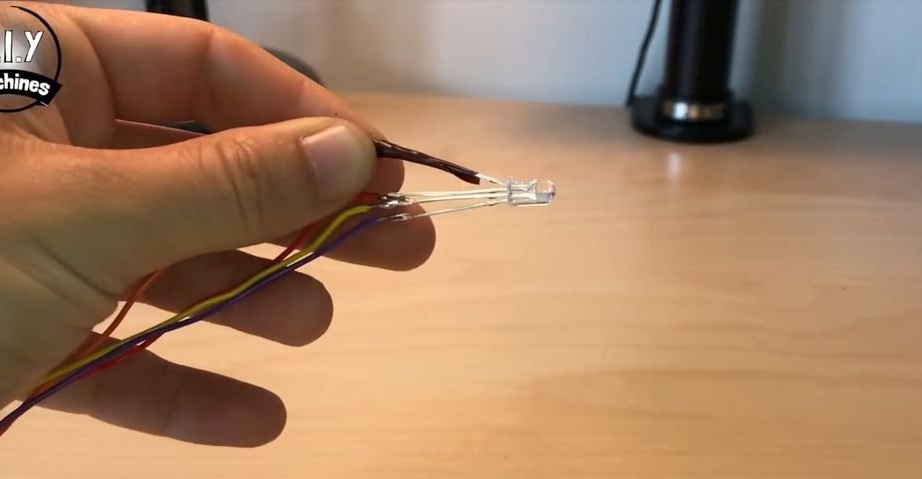
Paso cuatro: LED
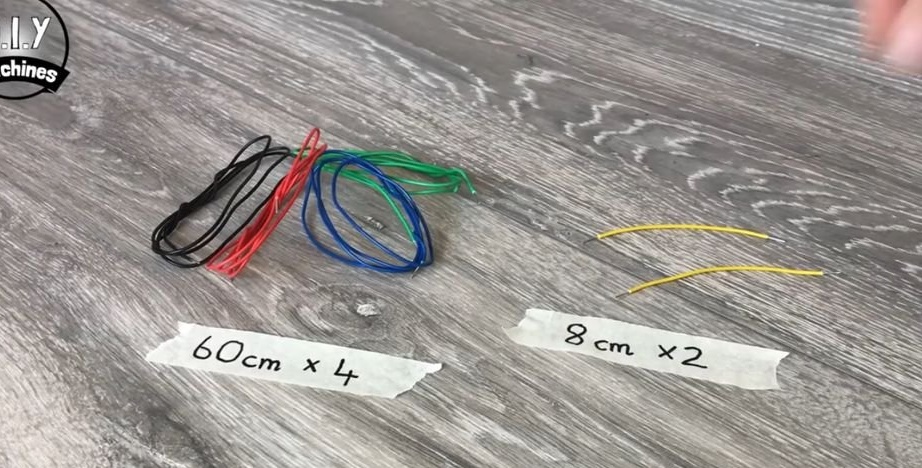
El maestro usará el LED RGB para la indicación. Suelde hilos de 180 cm de diferentes colores a cada pata. La unión aísla.




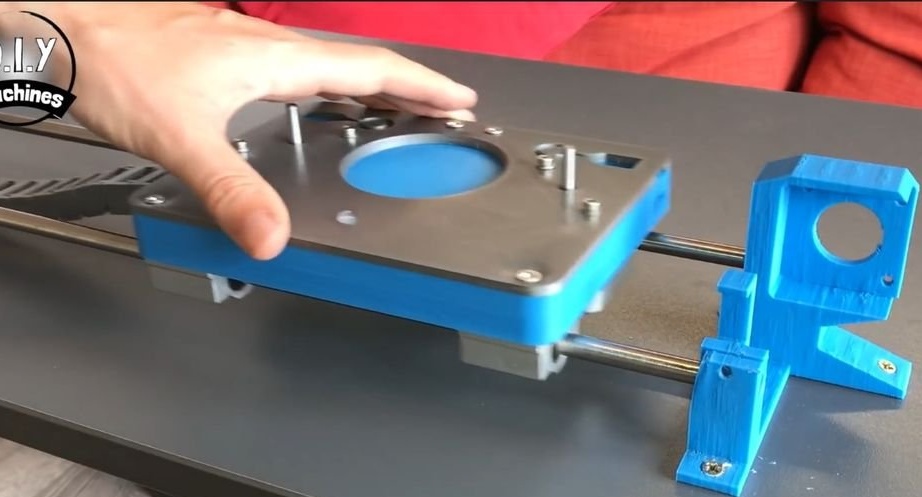
Paso cinco: plataforma
Imprime la parte 'slider_base_v3.stl'. Corrige un LED. Instala motores paso a paso.
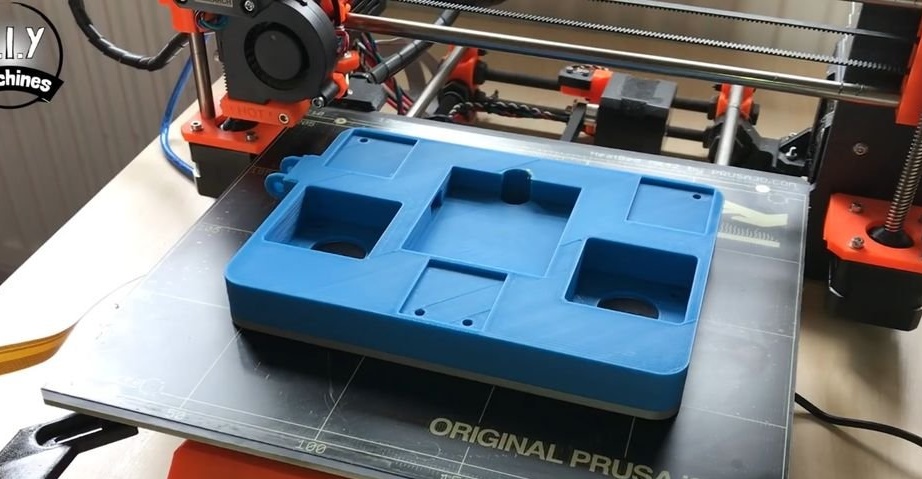

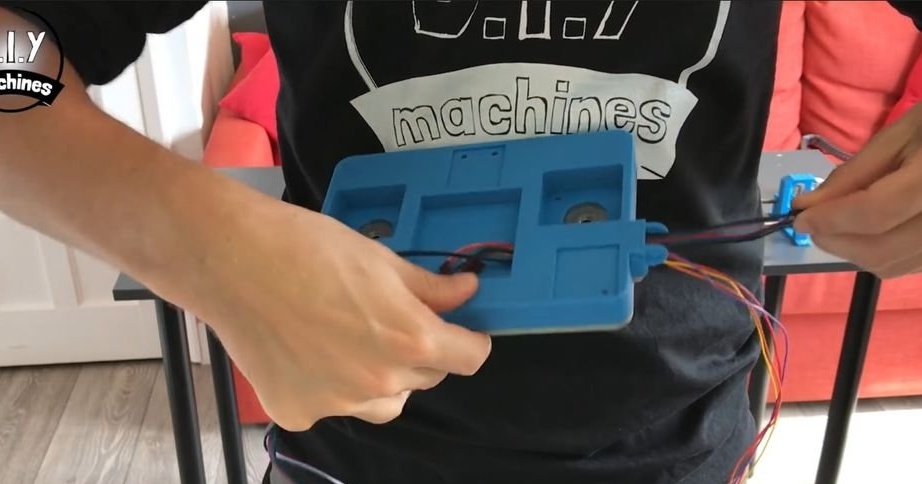
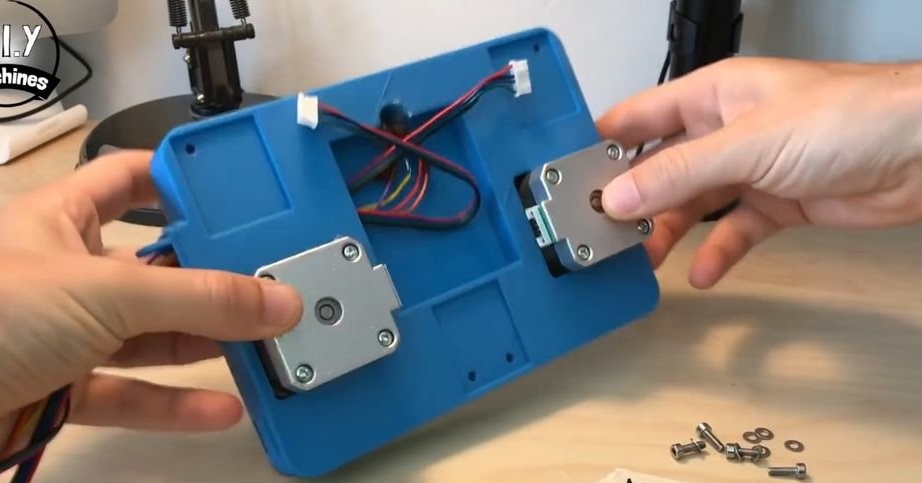
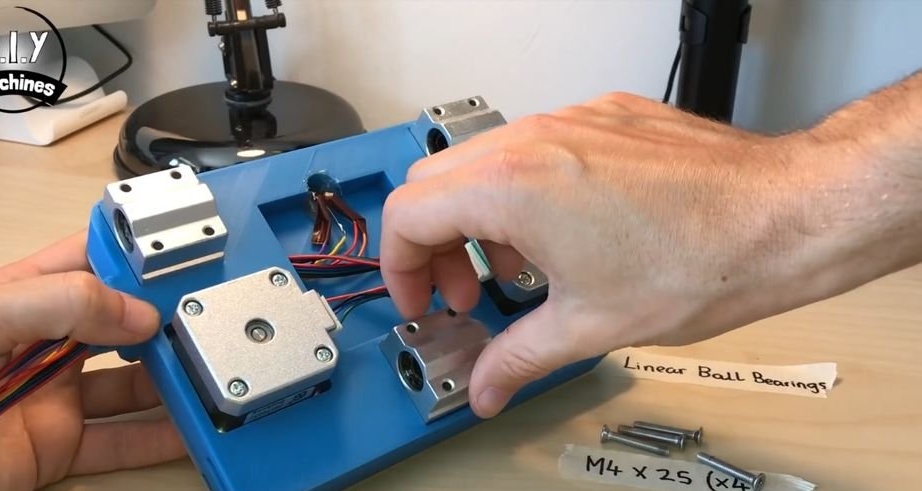
Instala rodamientos lineales.
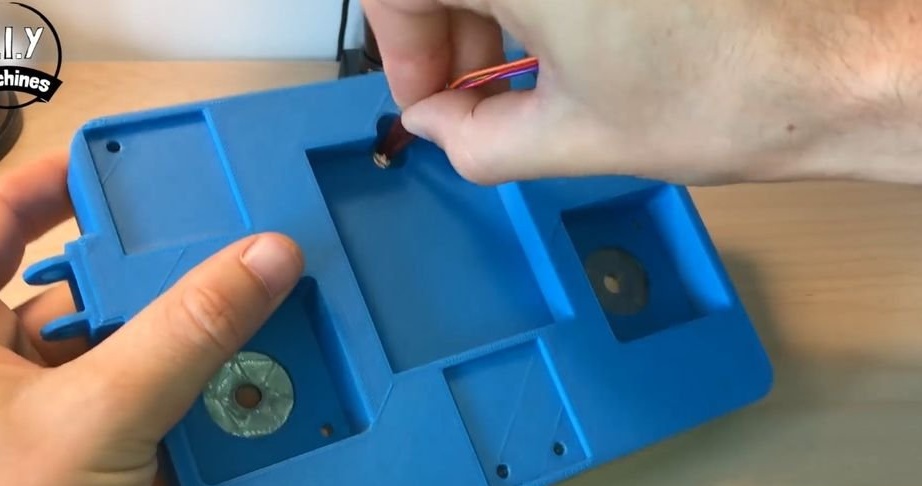
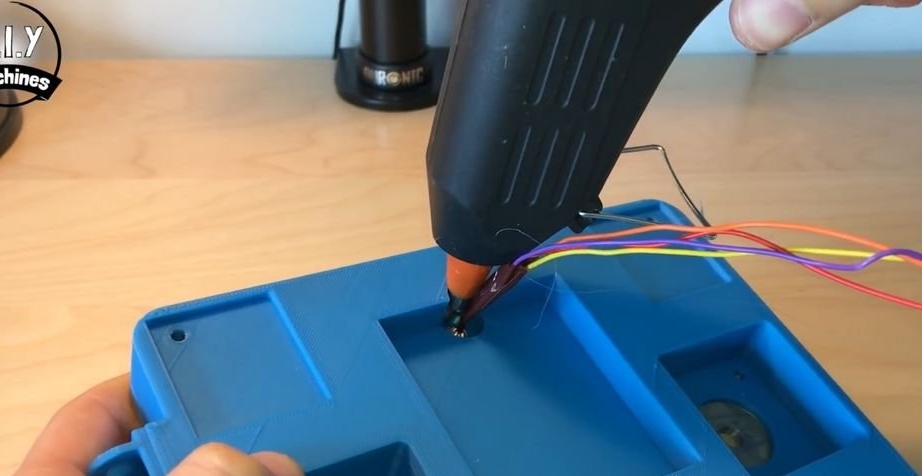
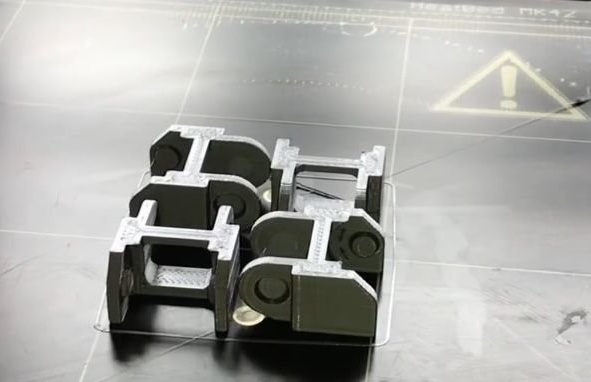
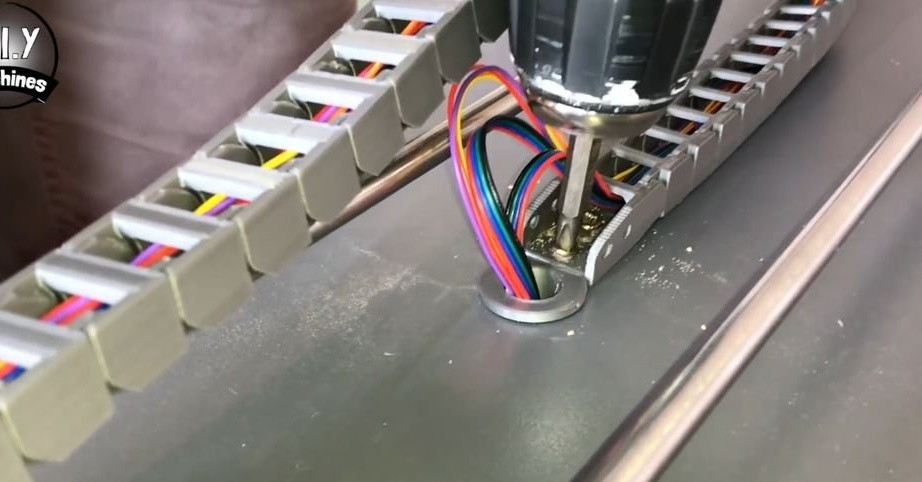
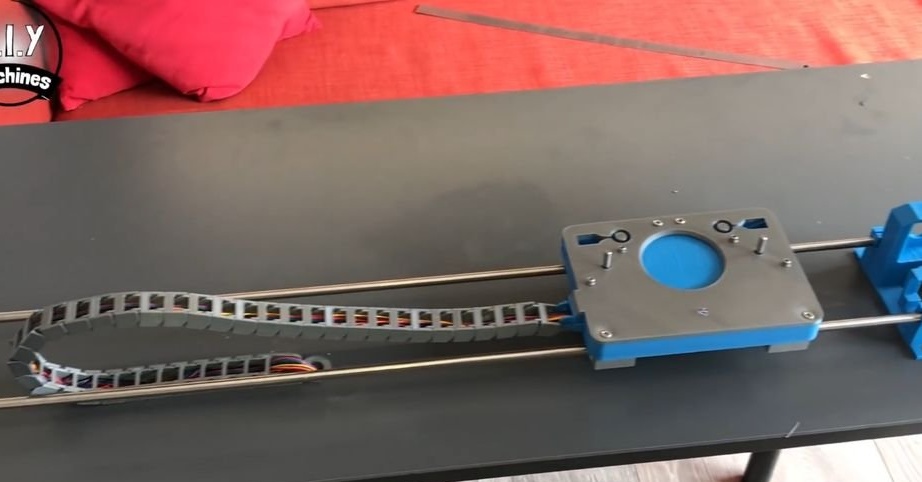
Paso seis: canal de cable
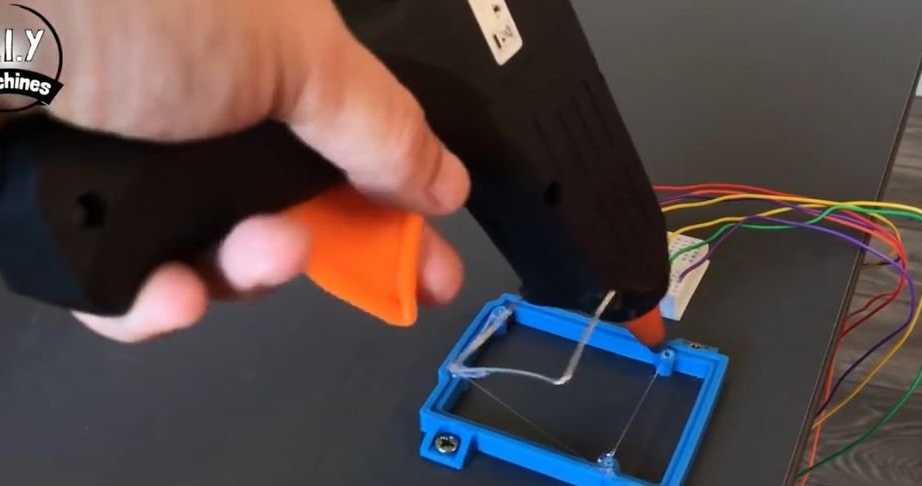
El canal de cable para el dispositivo consta de segmentos separados conectados en un solo circuito.Dentro del circuito, se colocan cables. La cadena es móvil y se dobla si es necesario. Los segmentos de cadena también se imprimen en la impresora.


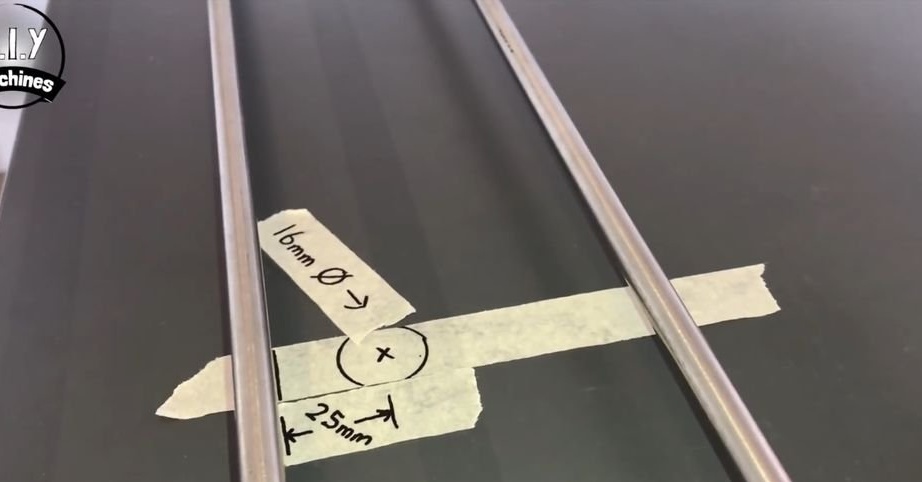
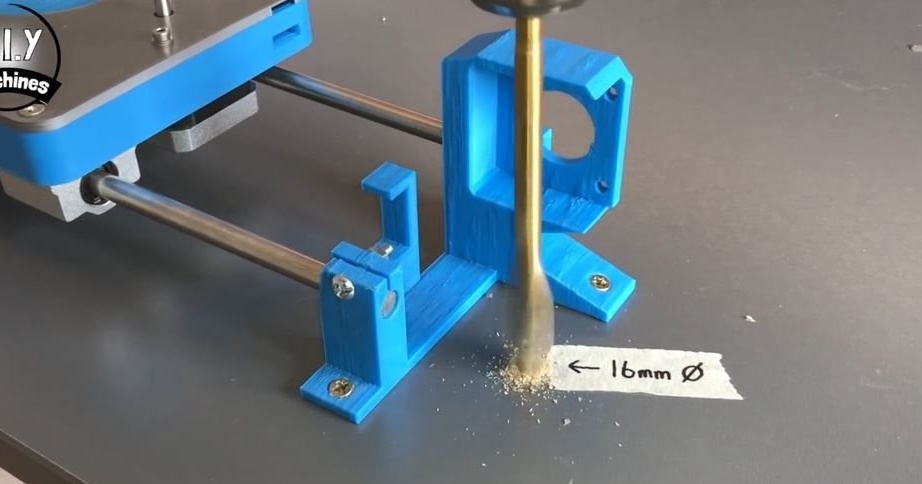
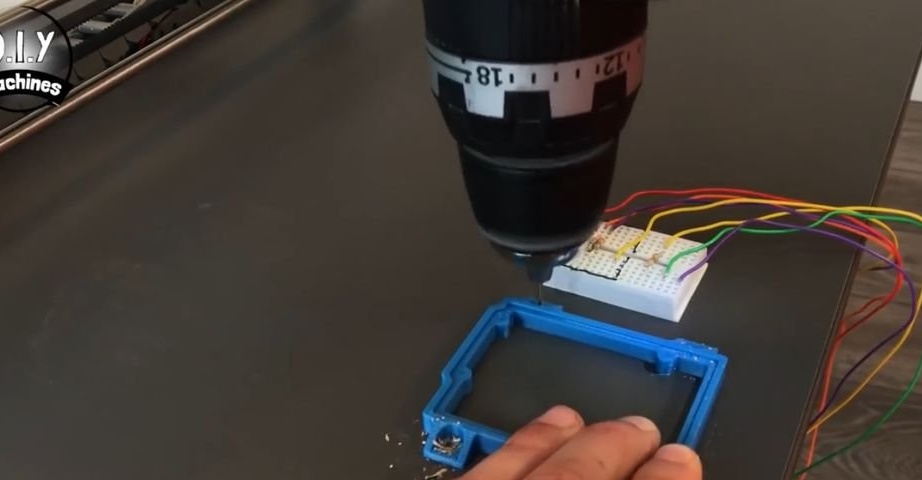
A una distancia de 25 mm de la guía extrema y 47 cm del tensor, taladra un agujero de 16 mm. Inserta la manga "Table_Tidy.STL" en el orificio. Sujeta el canal del cable en un extremo de la plataforma, el segundo en la encimera al lado de la manga. Estira los alambres.



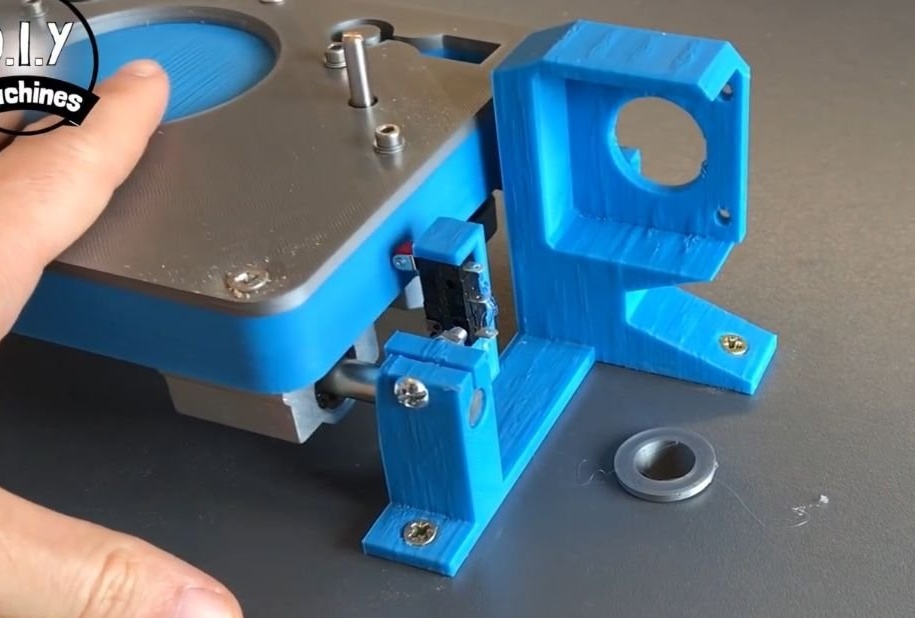
Séptimo paso: cambiar
Junto al soporte del motor, se perfora otro orificio de 16 mm. Inserta una manga en él. Fija el remolque al soporte. Suelde a sus contactos por 1 metro de cable.

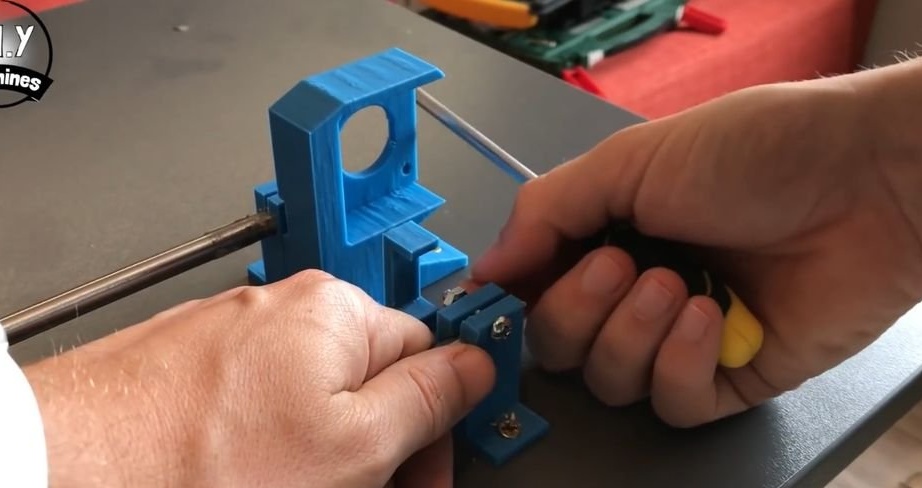
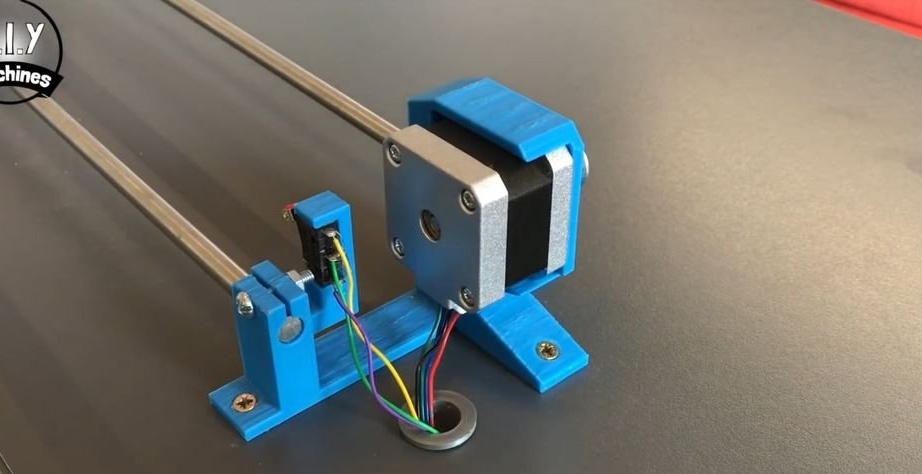
Paso ocho: motor del eje X
Asegura el motor para montar.

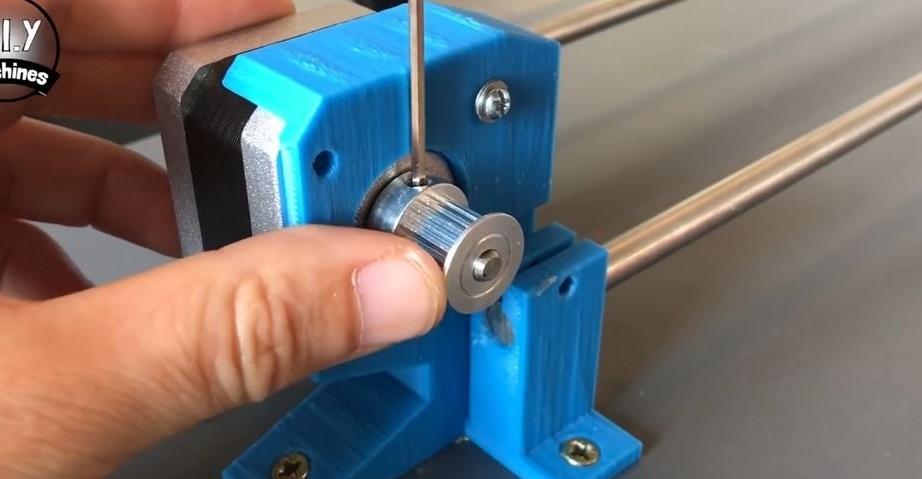
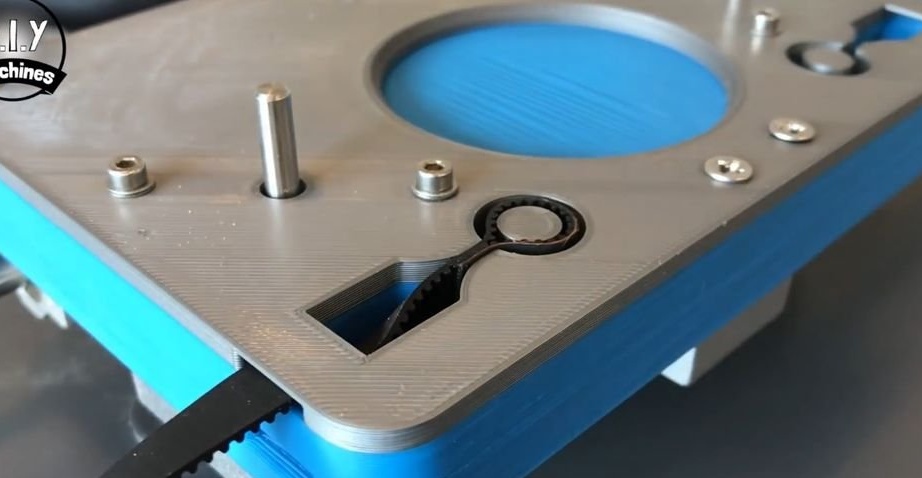
Paso nueve: cinturón
Asegura la polea al eje del motor. Abrocha el extremo del cinturón a los soportes de la plataforma. Tira de la correa a través de la polea y a través de la polea tensora. Sujeta el segundo extremo a los soportes. Si es necesario, la tensión de la correa se puede ajustar apretando o desenroscando el tornillo.







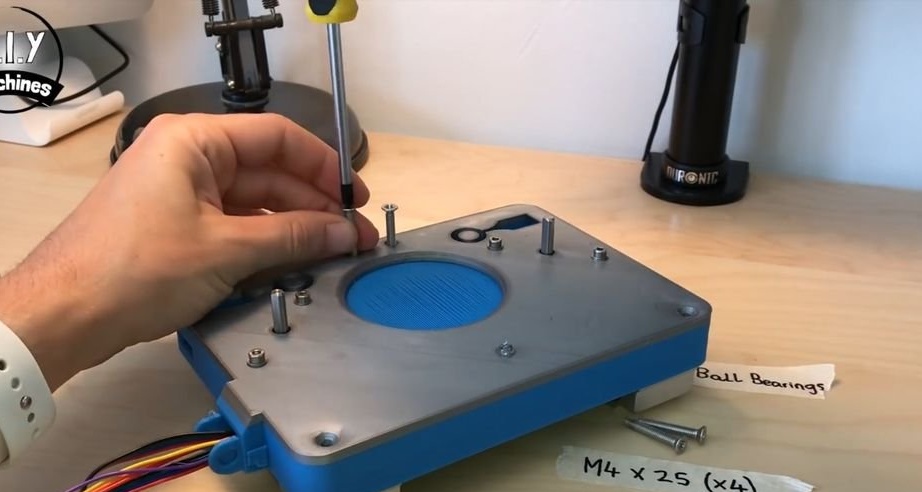
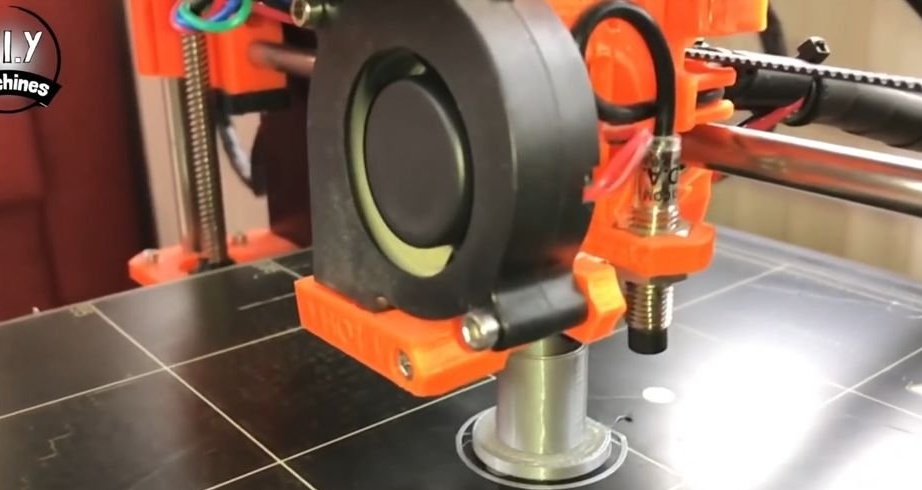
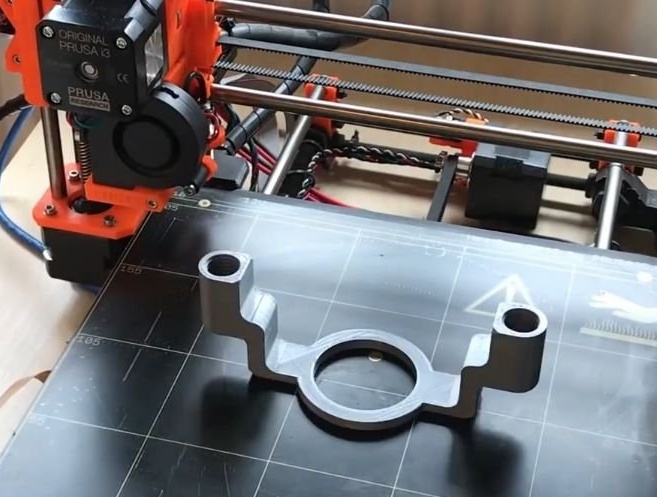
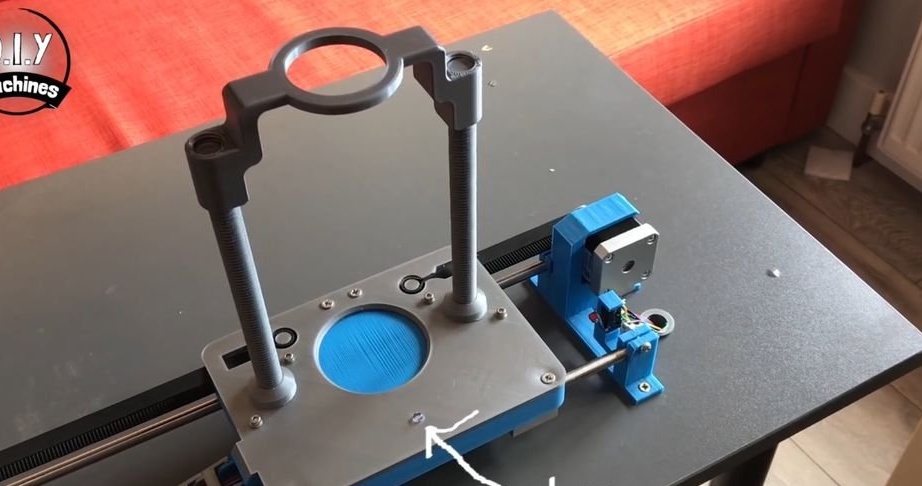
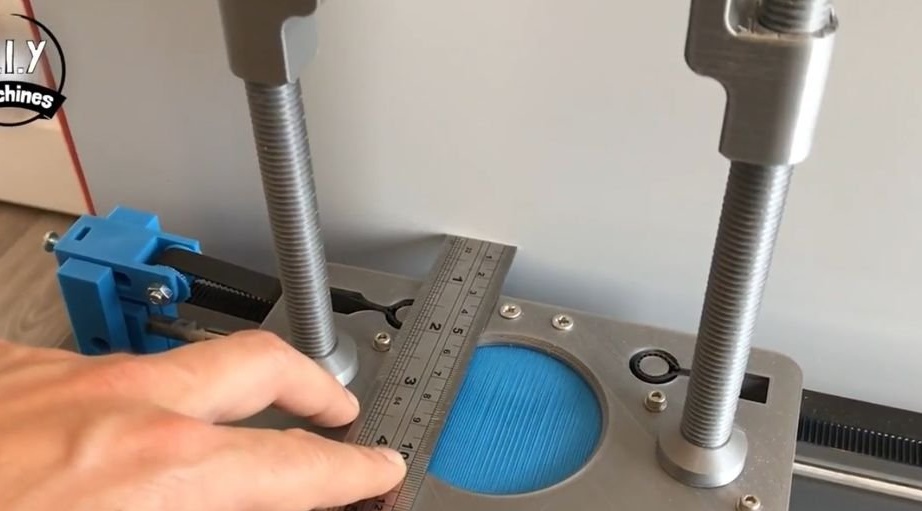
Paso diez: portavasos
Imprime dos varillas roscadas main_rod2.3.STL y el soporte Dispenser_Paddle_V2.STL. Se abrocha en una plataforma.



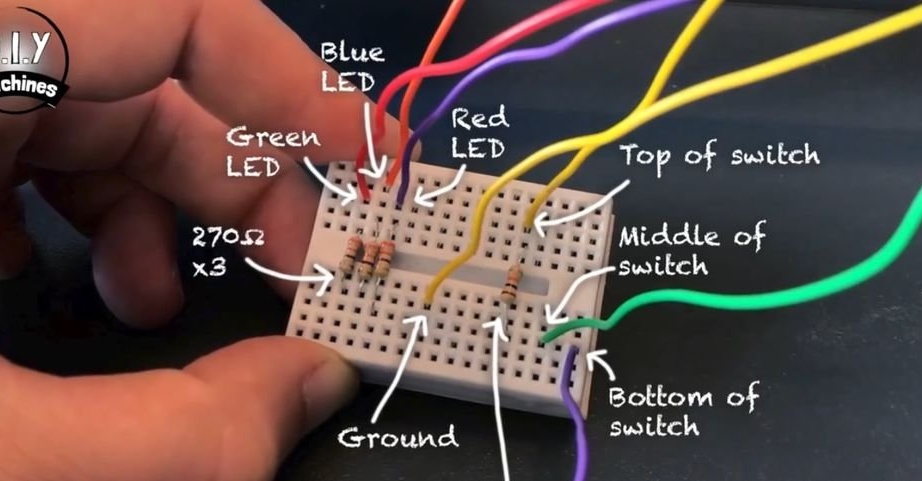
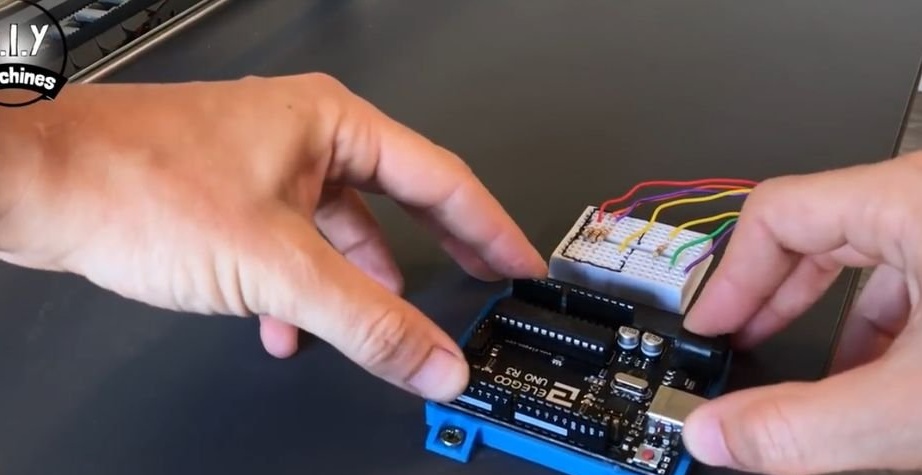
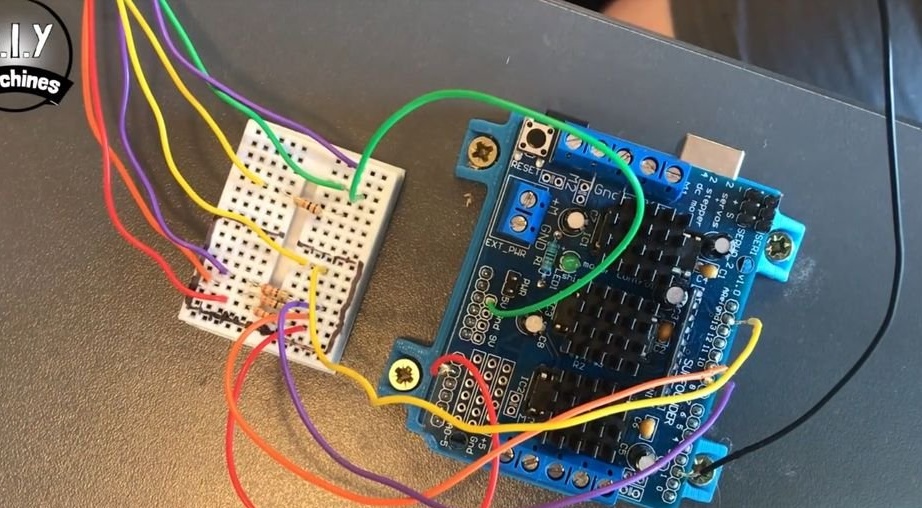
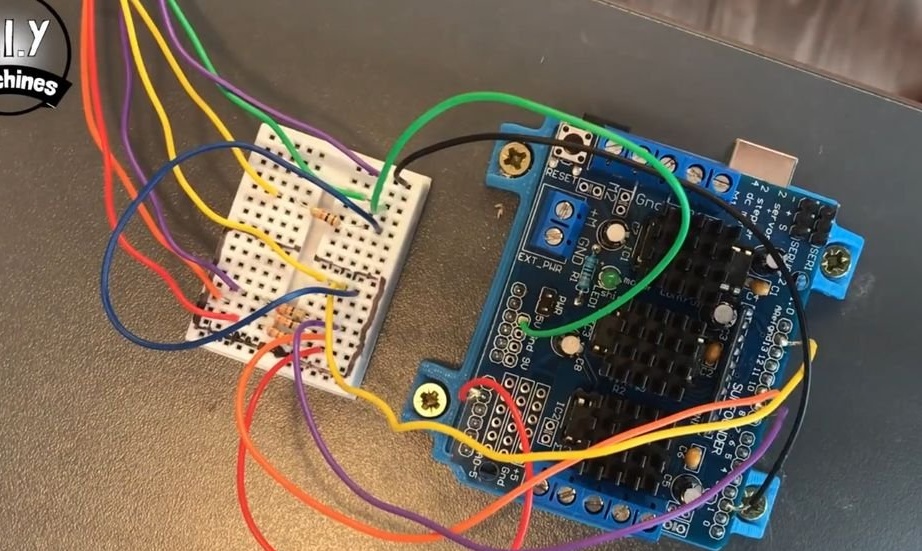
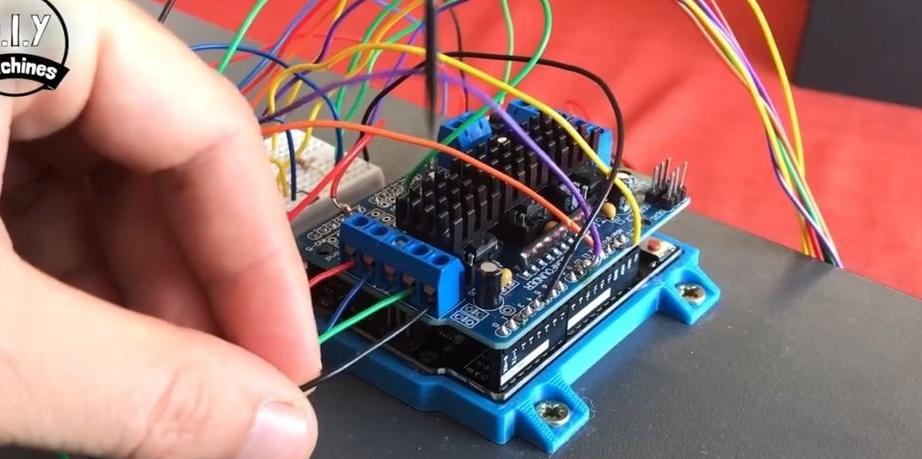
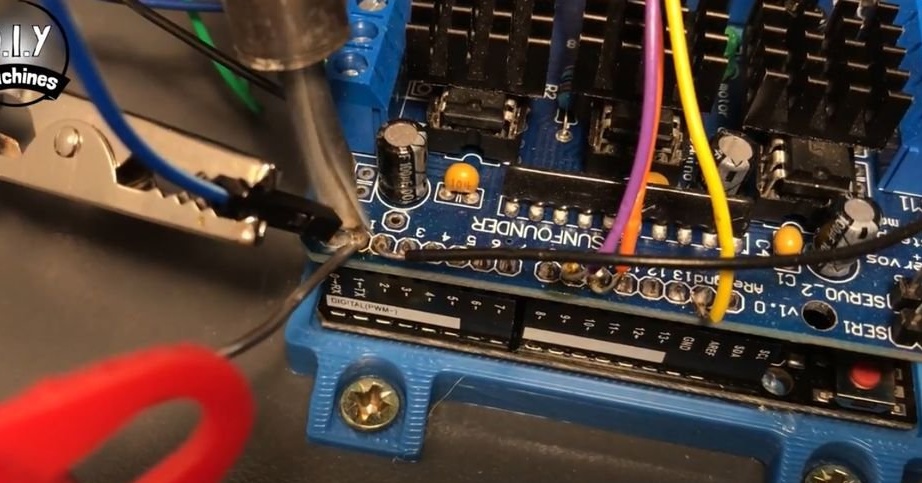
Paso once: indicador, remolque, placa de pruebas
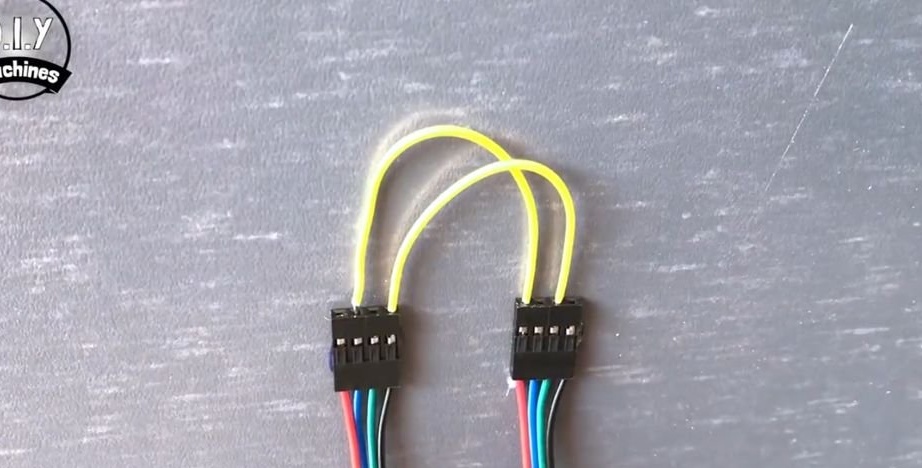
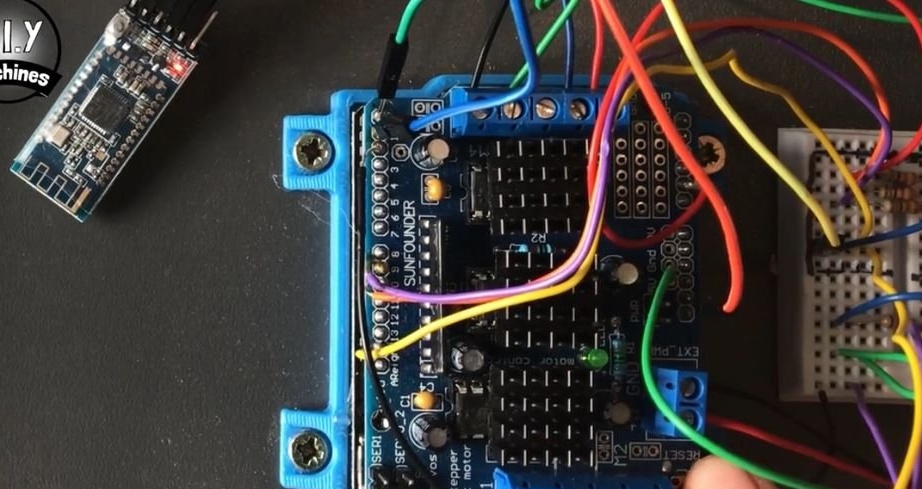
LED RGB, tiene cuatro patas. Una pierna es común y tres de color. El maestro toma cuatro cables más, cada uno de unos 15 cm de largo, y los suelda de la siguiente manera (por los colores del brillo del LED) al módulo del controlador del motor:
Rojo al pin D9
Azul al pin D10
Verde al pin A1
El cátodo al pin GND.
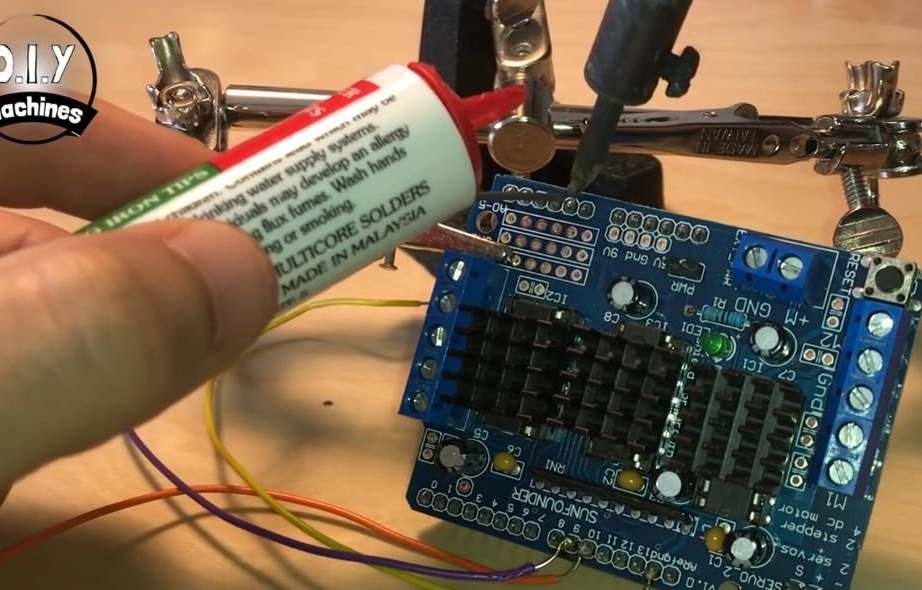
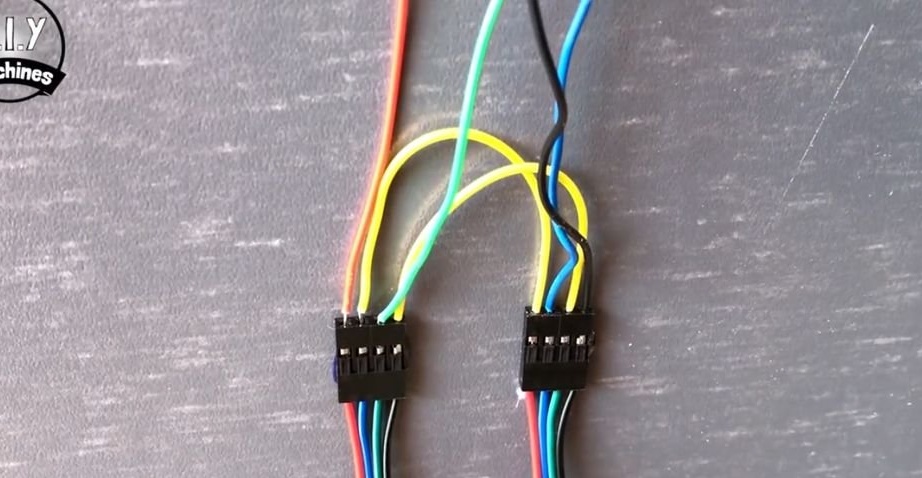
Conecta el remolque: el contacto superior es GND, el contacto central es de 5 V, el contacto inferior es la salida n. ° 2.
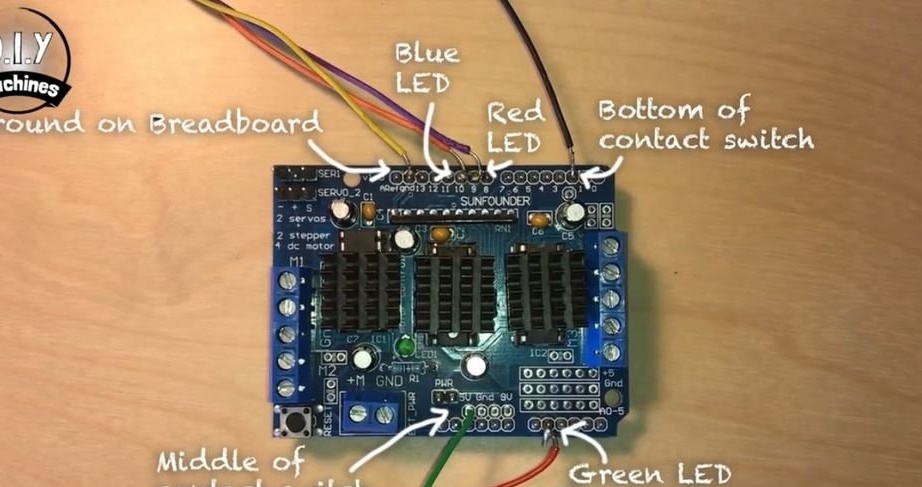
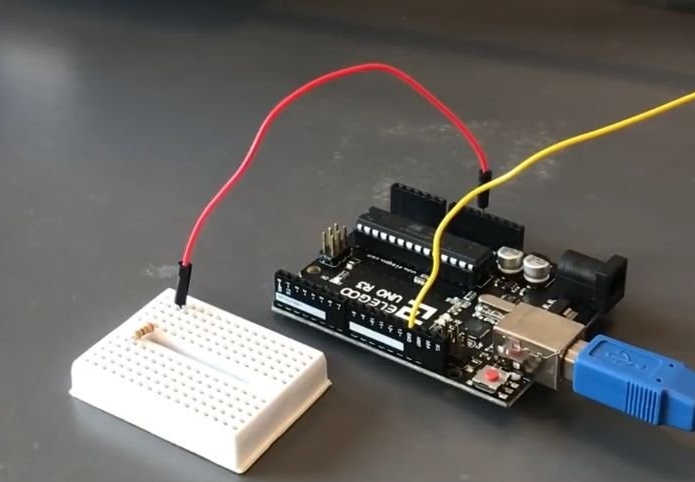
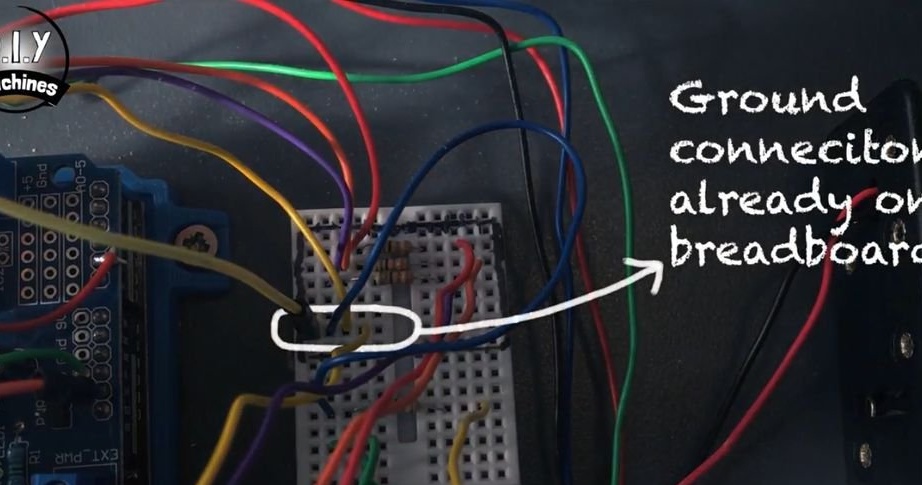
Luego monta todo en una placa de prueba (ver foto). Asegura el tablero a la mesa.
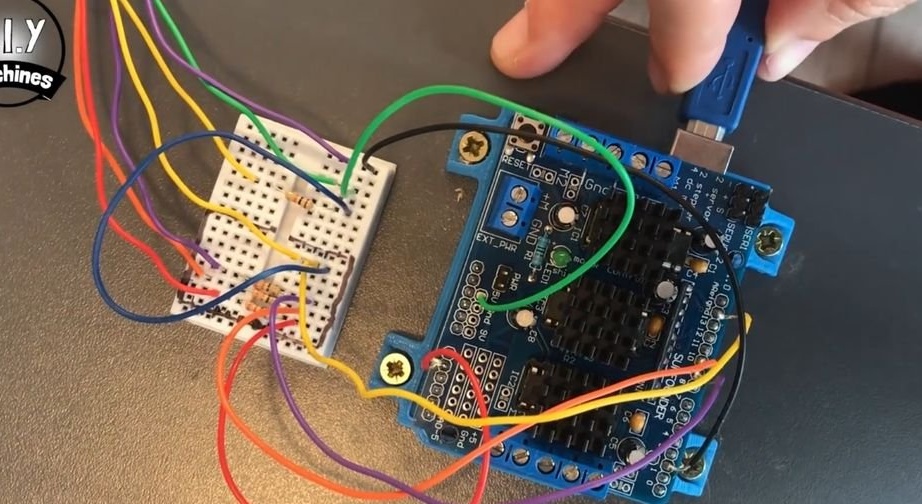
Paso Doce: Arduino
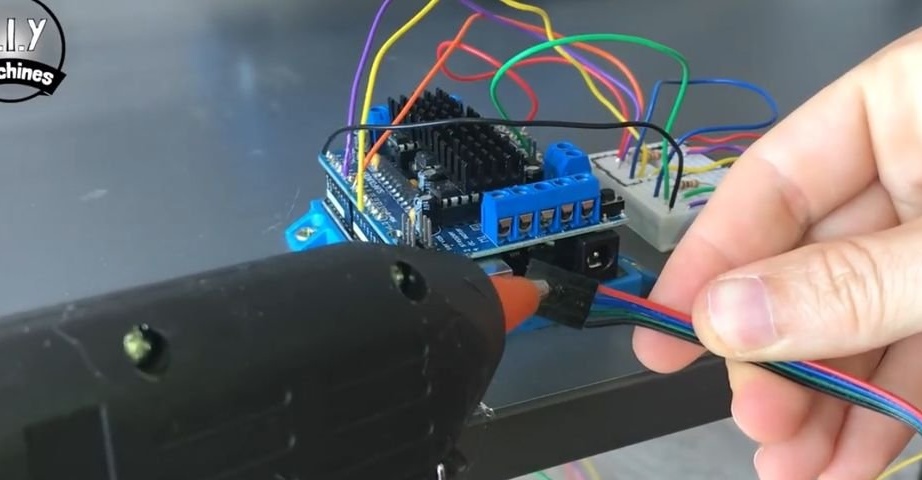
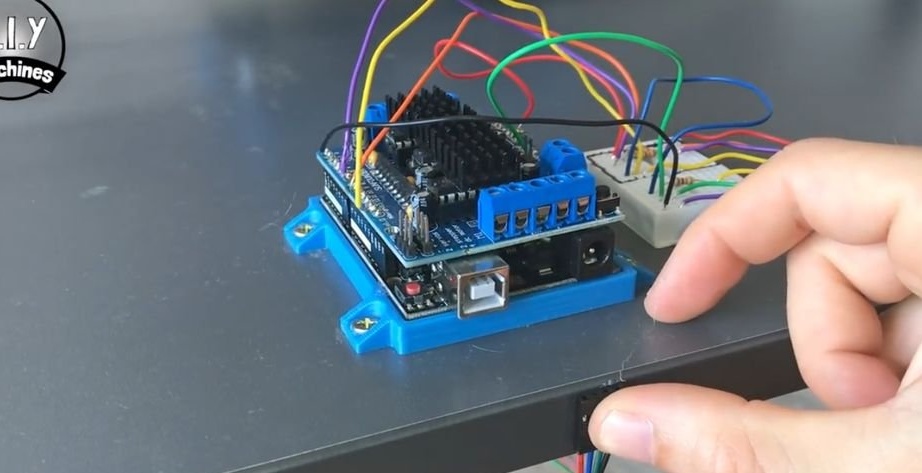
Imprime placa de montaje para Arduino. Asegura el plato a la mesa. Se abrocha en un plato de Arduino. Instala un módulo de controlador de motor en el Arduino.
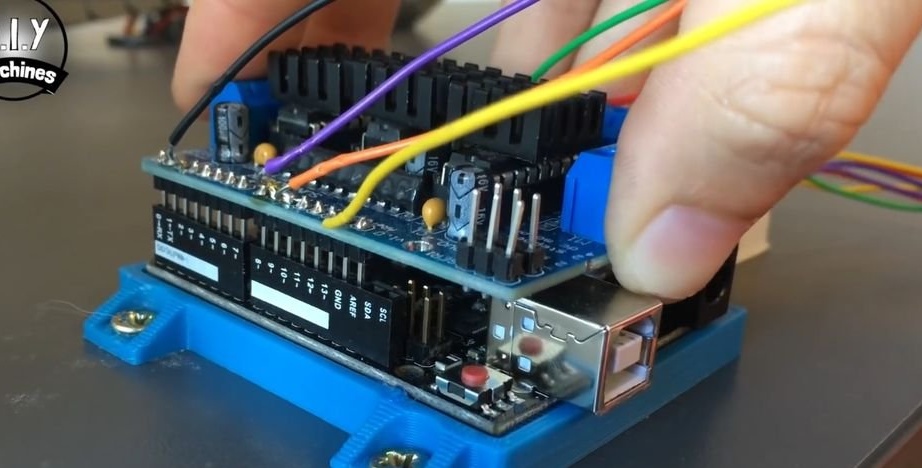
Conecta los cables del controlador a la placa de pruebas, como en la foto.
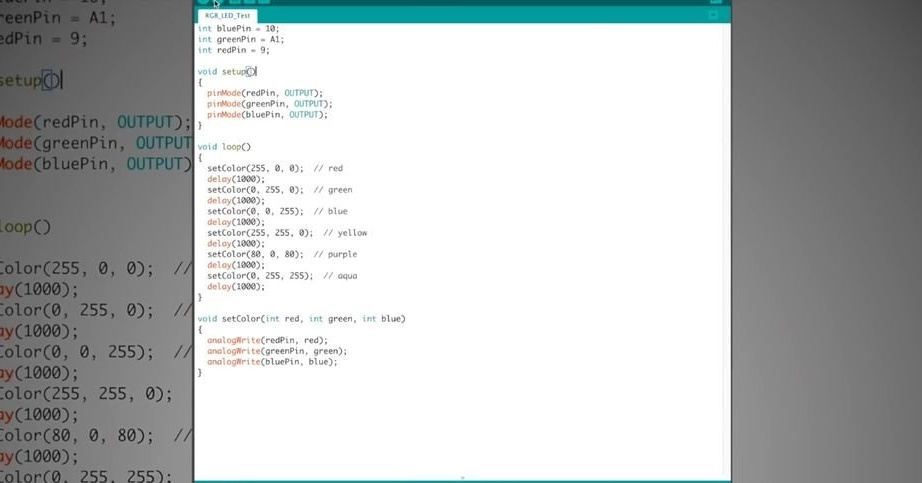
Paso trece: descarga el código
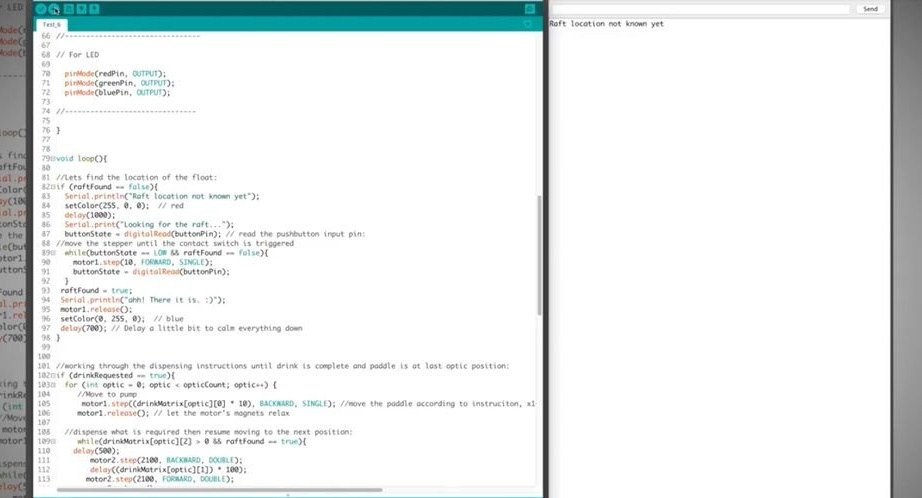
Conecta Arduino a una PC y descarga el código. El código se puede encontrar aqui.
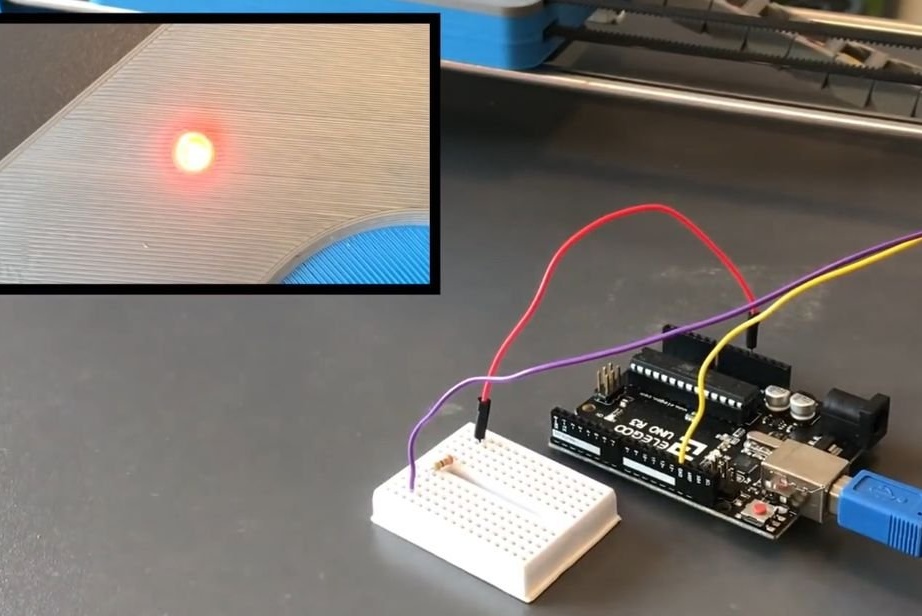
Ejecuta el código de prueba de LED. El LED debe iluminarse en diferentes colores.
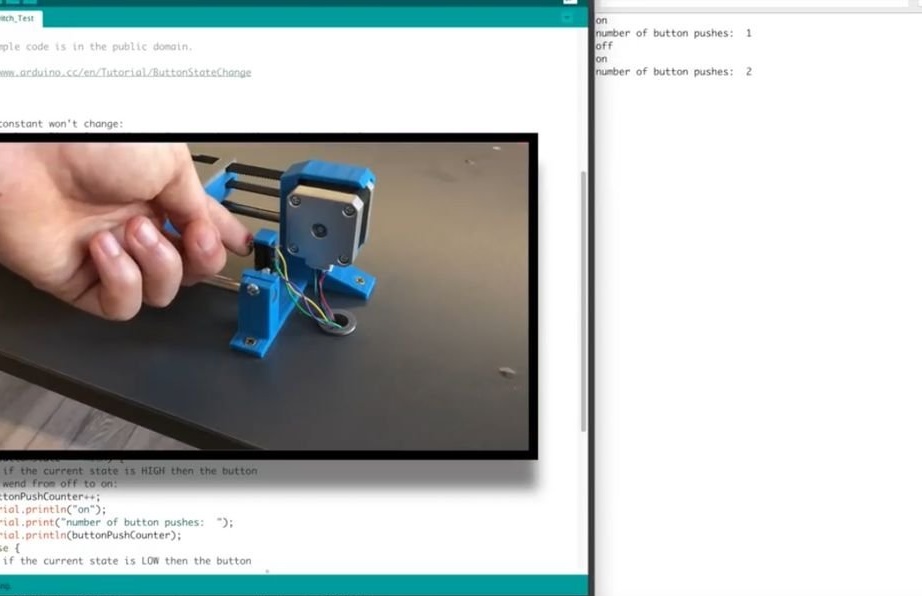
El siguiente script para descargar es "Contact_switch_test". Tan pronto como se cargue, cada vez que presione el interruptor de límite debe mostrarse en el monitor.

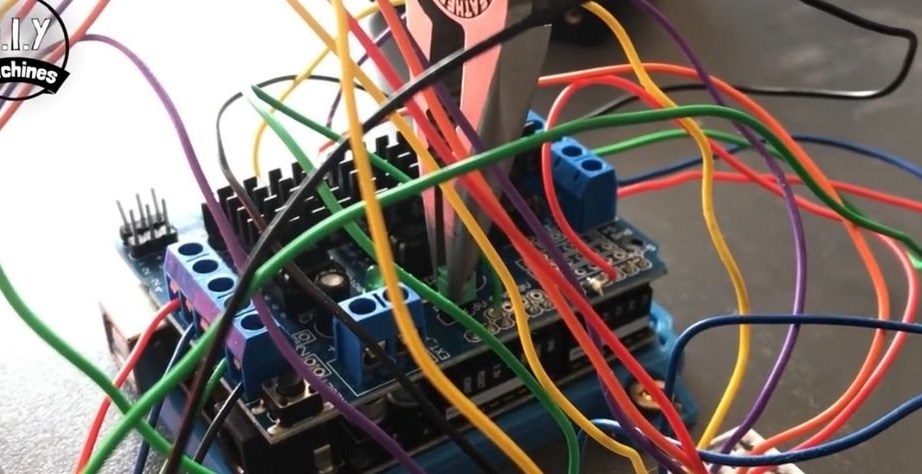
Paso catorce: conectando los motores X y Z
Asegura el conector que viene del motor X a través de la placa de pruebas en la mesa. Se conecta con los cables del controlador.
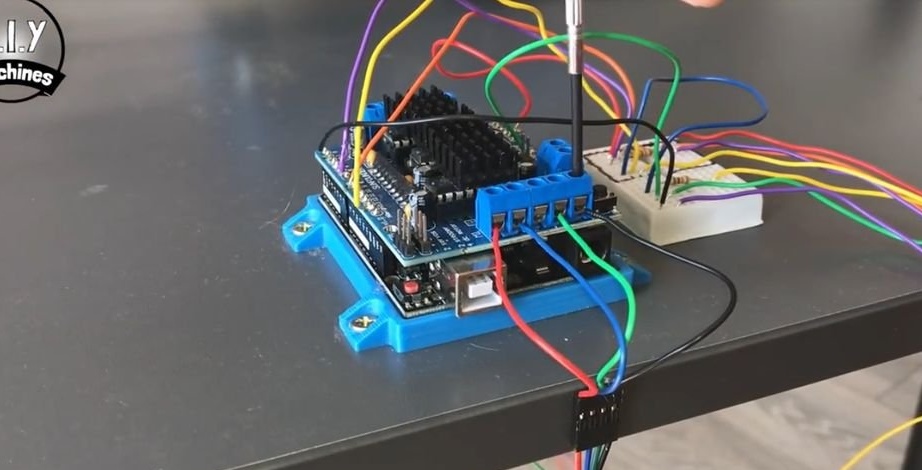
Conecta motores paso a paso del eje Z.
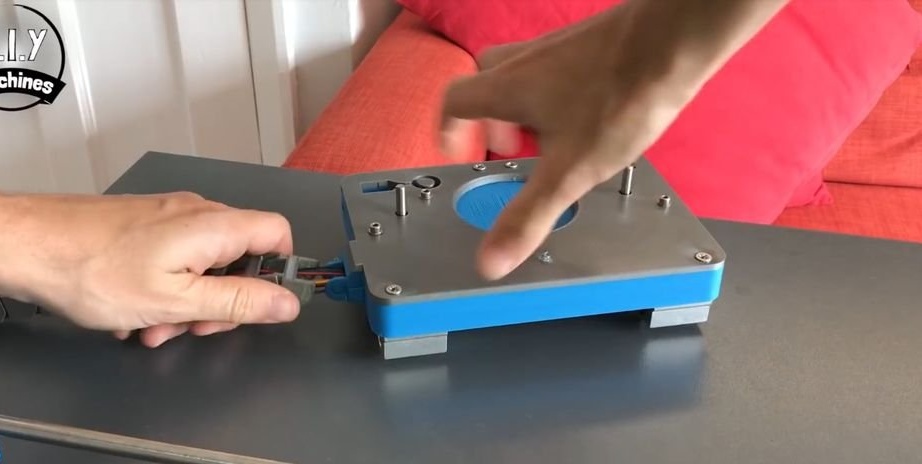
Paso quince: compartimento de la batería
Elimina un puente en un módulo. Conecta el compartimento de la batería.
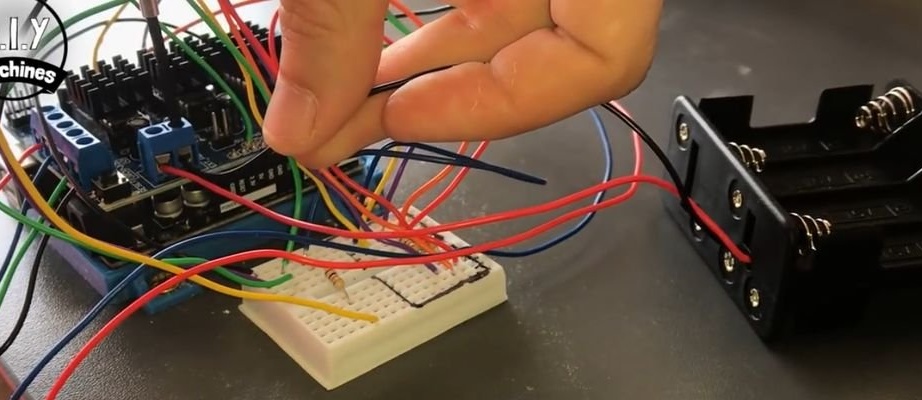
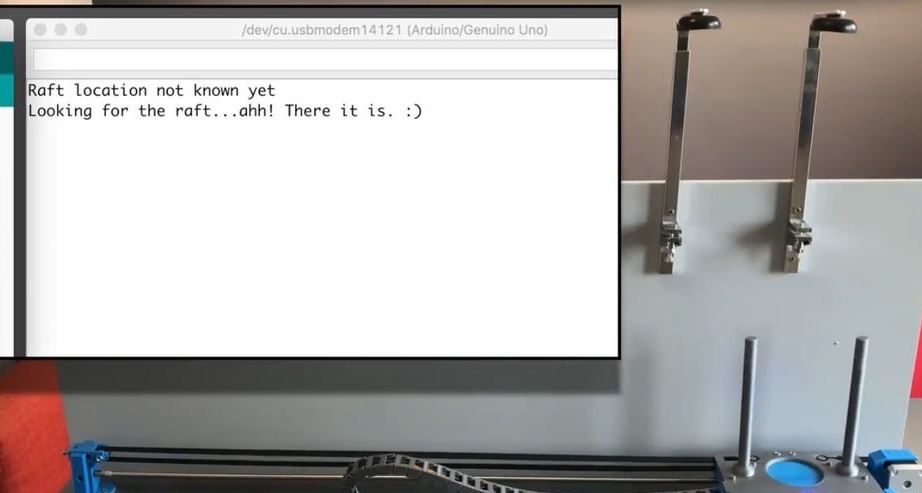
Ahora puede ejecutar la "prueba 1". El LED rojo debería encenderse y la plataforma debería alcanzar el interruptor de límite. Entonces el LED se volverá verde.
Paso dieciséis: portabotellas
El uso de soportes asegura la pared posterior del MDF.




Además mueve la plataforma 1 cm desde el interruptor de límite. Alinea el soporte de vidrio y asegura el soporte de la botella con el dispensador (desafortunadamente el maestro no dio una descripción para la fabricación o compra del soporte). Siguiente Los soportes se sujetan cada 12 cm.



Paso diecisiete: código, calibración, prueba
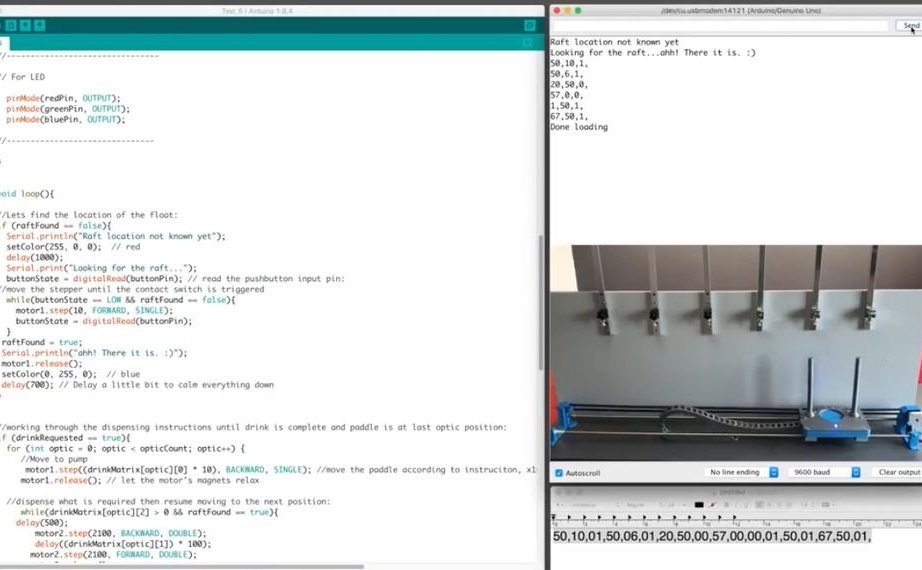
Carga el código principal en https://www.thingiverse.com/thing:2478890
Los siguientes valores se establecen en la configuración: 50,10,01,50,06,01,50,50,00,57,00,00,50,50,02,50,50,00. El maestro tiene seis dispensadores. En la configuración hay seis grupos de tres, donde el primer dígito es la distancia desde el interruptor de límite, el primer dispensador, el segundo dispensador, etc., el segundo dígito es el momento en que se vertió la bebida en el vaso, el tercero es el número de vertido. Todos estos valores se pueden cambiar según sea necesario.


La primera bebida que preparó el dispositivo fue ginebra y cola. Para igualar la presión en la botella con cola, debe hacer un agujero. Luego, el asistente establece los parámetros necesarios.



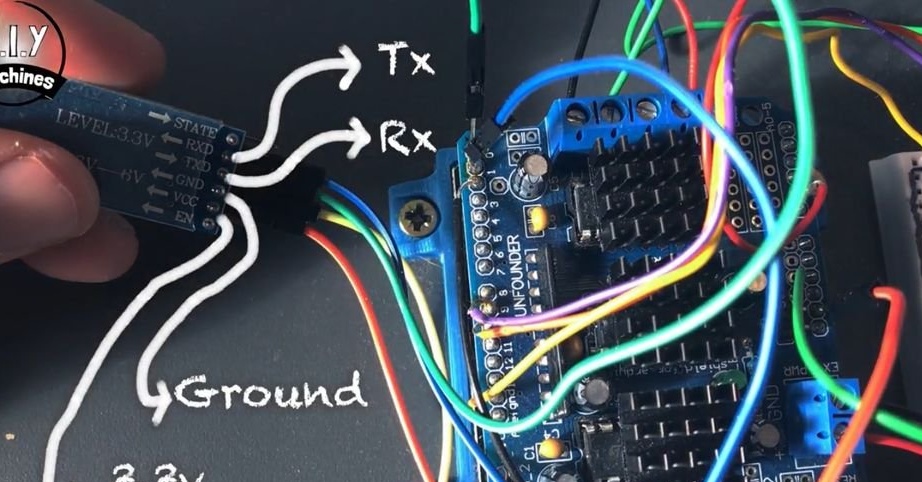
Paso dieciocho: módulo bluetooth
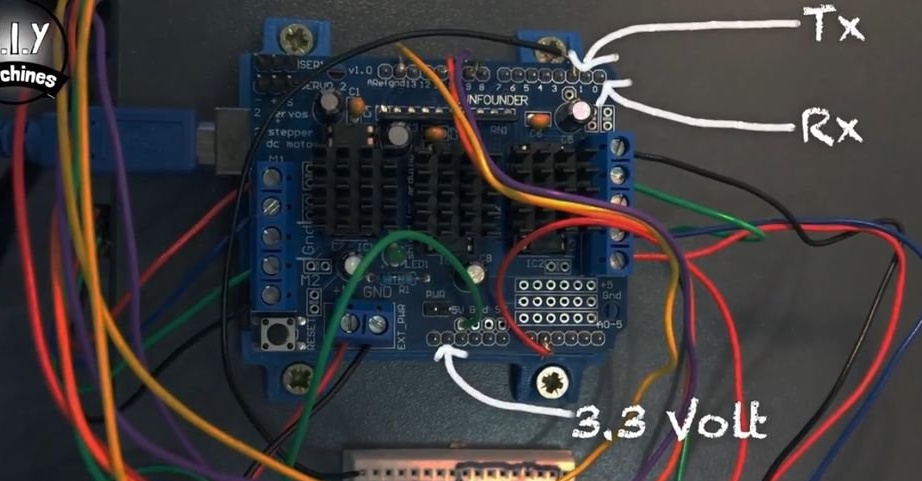
Para controlar al camarero desde el dispositivo, el maestro instaló un módulo Bluetooth. El módulo se conecta de la siguiente manera.
HM10 -> Escudo Arduino
RXD ------> TX
TXD -------> RX
GND ------> Tierra
VCC ------> 3.3V

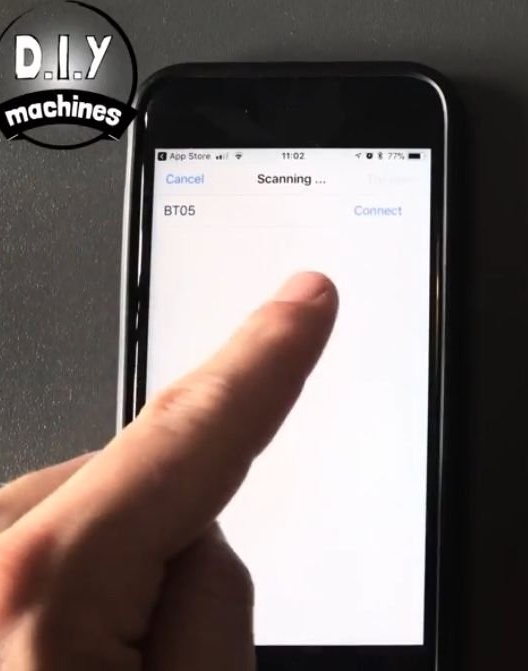
El maestro tiene un teléfono inteligente con iOS. Para este sistema, descarga "hm10 bluetooth serial lite" de la tienda de aplicaciones. Luego establece conexiones y entra en la configuración.

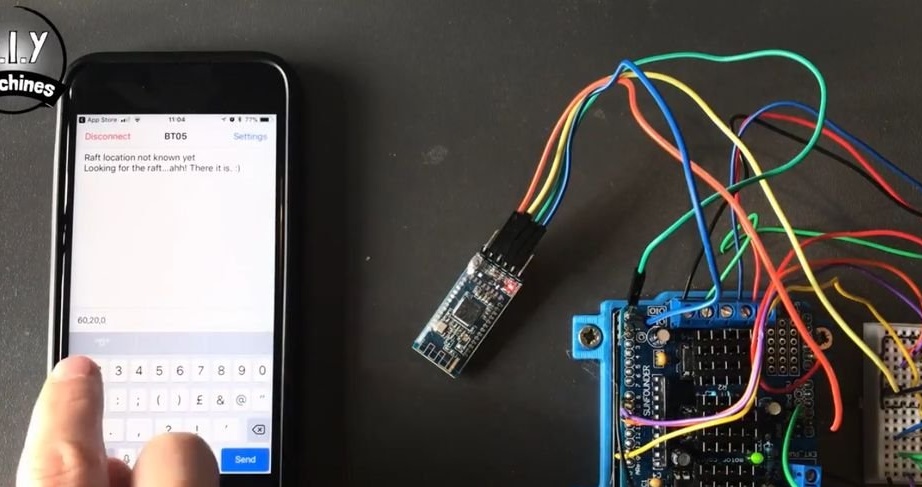
Todo está listo y para obtener información más completa, algunos videos.