

Hola amigos Hoy tenemos otro artículo muy interesante, es decir, hoy veremos cómo hacer un dron Mikor con una cámara FPV. Este hecho en casa perfecto para aquellos que quieren aprender a conducir en micro cuadricópteros de carreras y no quieren destruir drones caros en un par de minutos. Resultará ser un excelente simulador tanto para guías de drones con experiencia como para niños. El producto casero en sí consistirá en los componentes más económicos, especialmente para permitir que todos puedan hacerlo. También debe tenerse en cuenta que al final del artículo puede encontrar enlaces a los componentes principales del producto casero. Bueno, bueno, creo que no deberías demorarte con una larga presentación, manejamos.
Y así, para este dron necesitamos:
- Marco (comprado o cortado de un material ligero y duradero).
- Motores microeléctricos 4 piezas.
- Controlador de vuelo.
- Formato de conector "madre" para la batería.
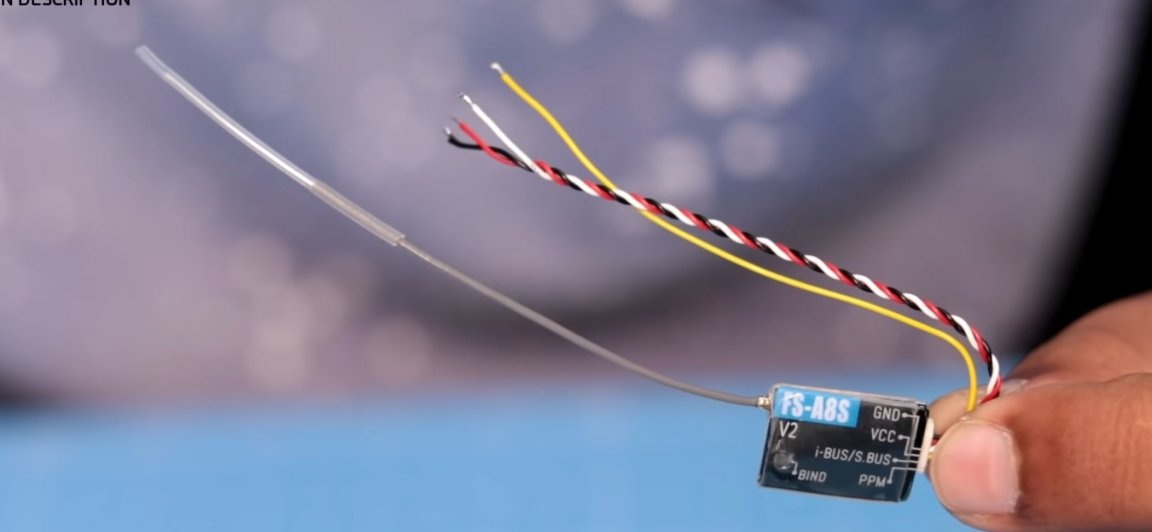
- Un receptor para equipos de radio control (en este caso, de Fly Sky).
- Equipos de radio control
- Cámara FPV.
- Tornillos y bastidores para placas de circuito impreso.
- Hélices 4 piezas.
- Batería
- Receptor para cámara FPV (por ejemplo, casco FPV).
De las herramientas también necesitarás:
- soldador
- soldadura
- Doble cinta adhesiva
- cinta aislante
- Pinzas
- destornillador
- cuchillo de papelería
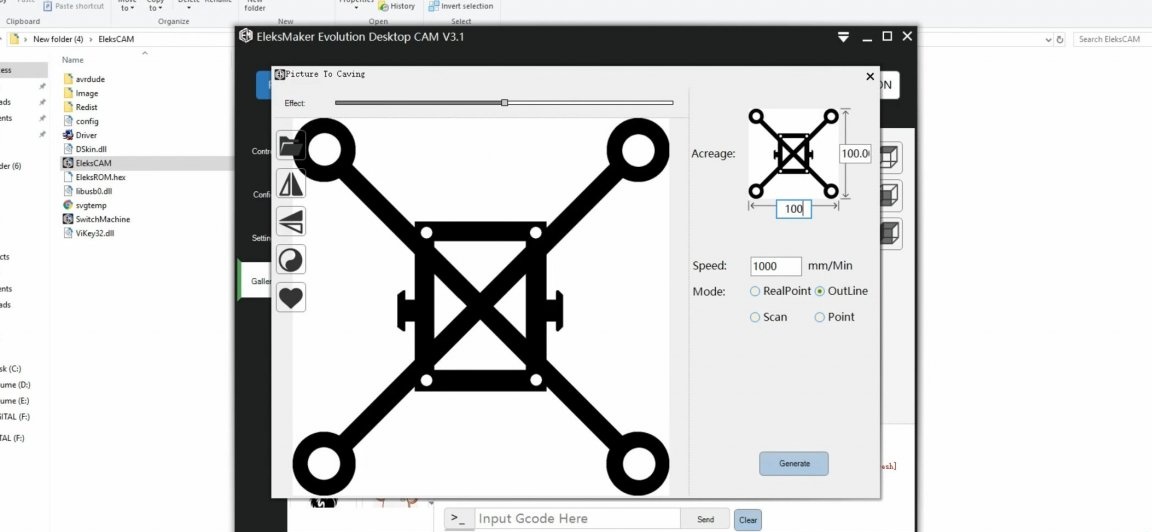
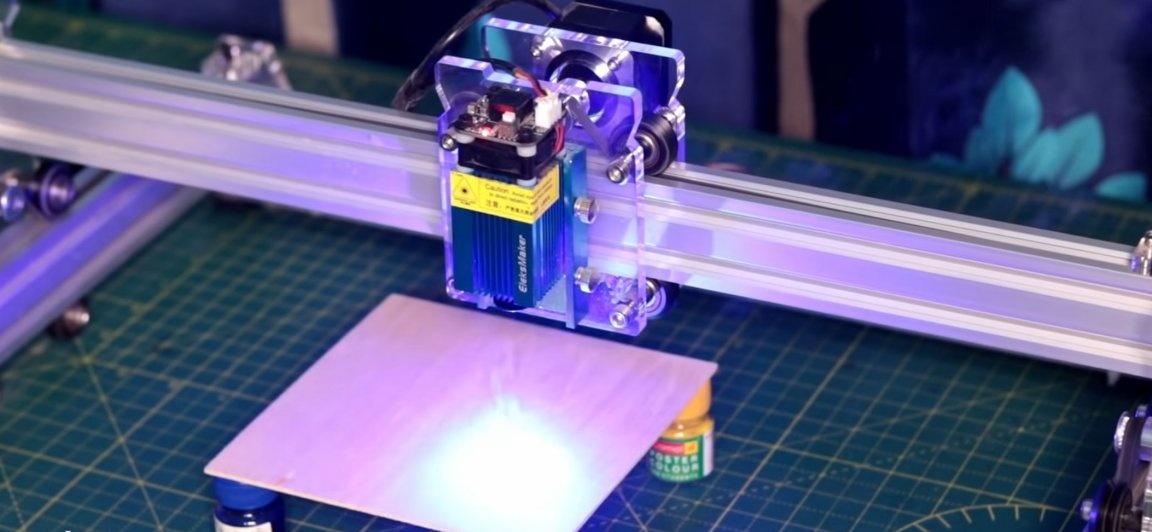
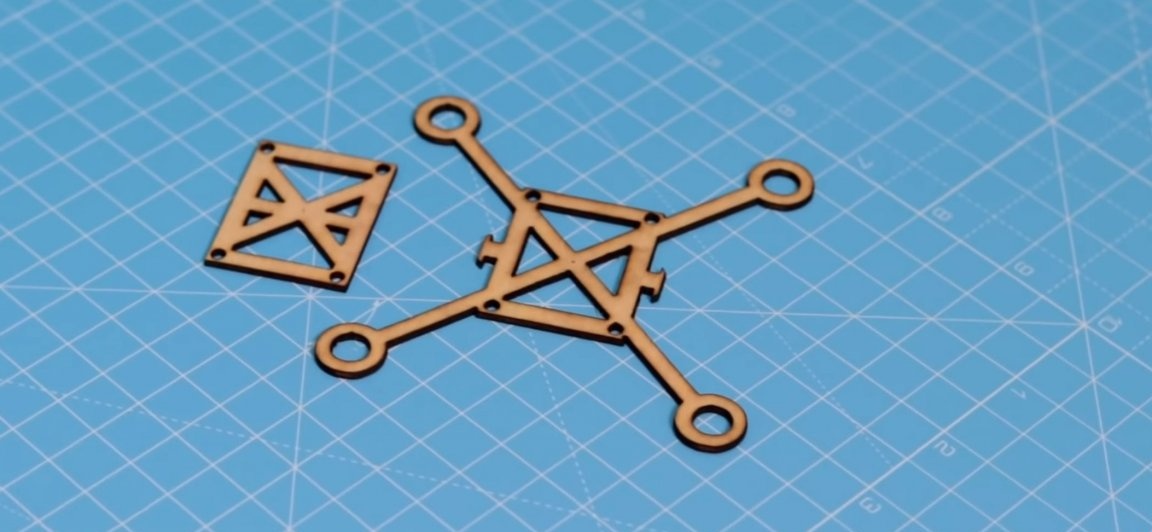
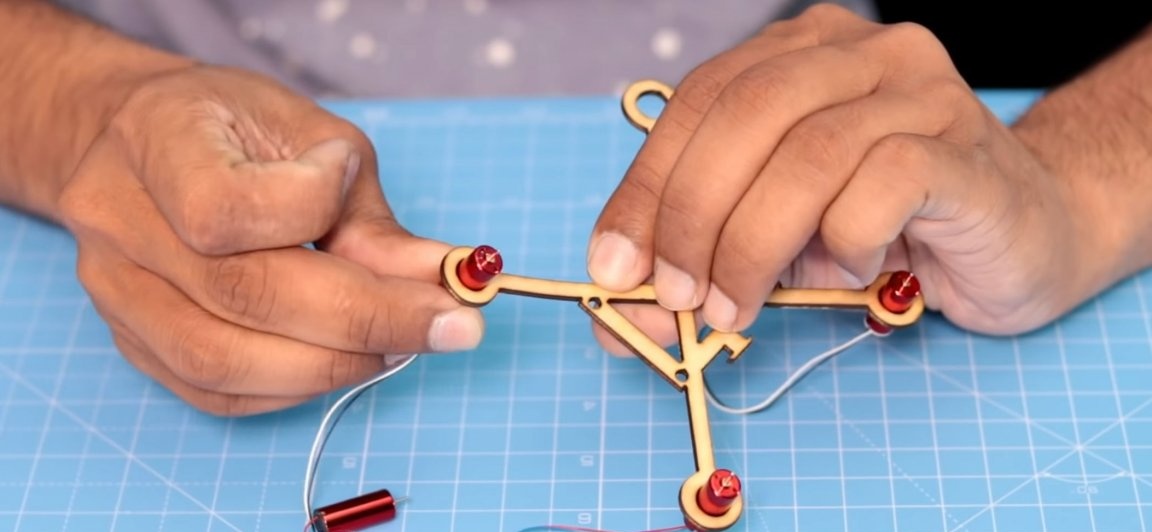
Para empezar, probablemente deberías comenzar con lo más importante, es decir, con el marco del quadrocopter, ya que es sobre él donde se ensamblará toda nuestra estructura. Cabe señalar que hay una gran cantidad de marcos prefabricados, pero no es necesario comprarlo, ya que puede tomarlo y cortarlo de algún material duradero y lo más importante, ligero. Por ejemplo, de una lámina de plástico ABS. Todo depende de su interés en el pasatiempo en sí, personalmente recomendaría comprar un marco listo de inmediato para que en el futuro cuando ajuste el dron no tenga que cambiarlo. El marco en sí se puede cortar con sus propias manos, encontrando en Internet diagramas y dibujos (imprimiéndolos y pegándolos al material del que va a cortar el marco). O puede utilizar los servicios de corte por láser, como lo hizo el autor.



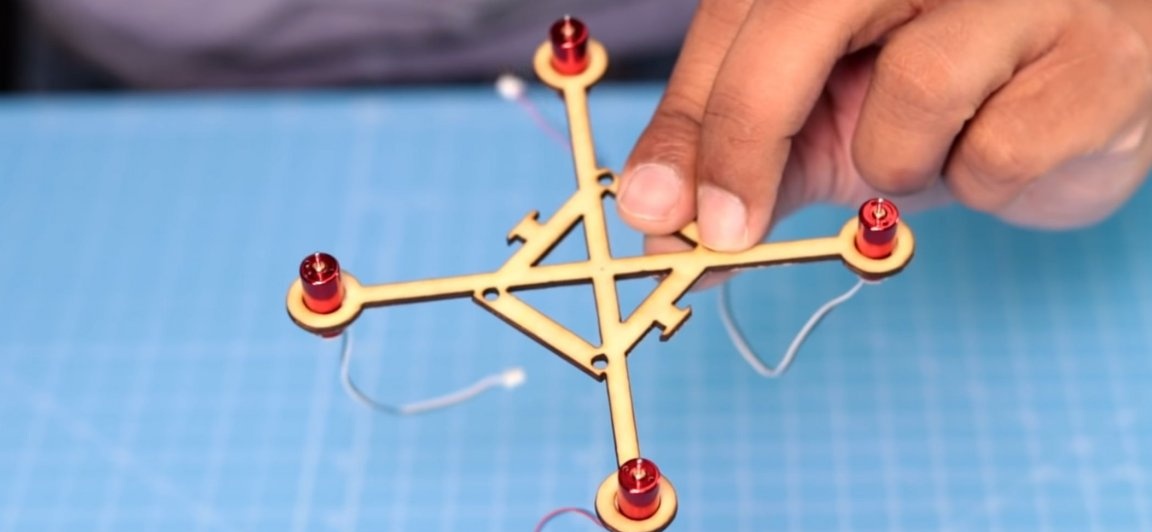
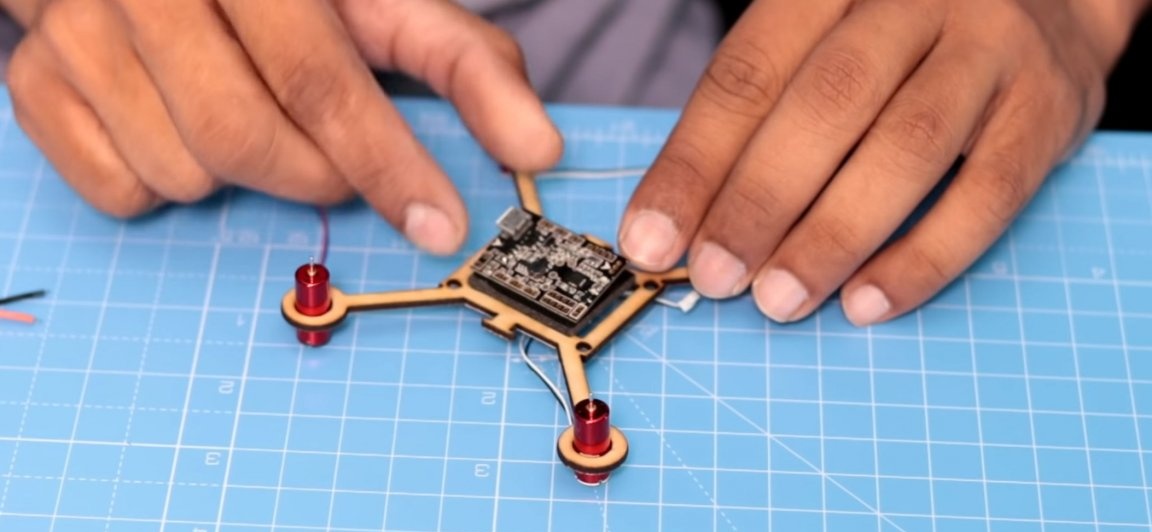
Para el siguiente paso, debemos comprar 4 motores eléctricos; para esto, los motores Racerstar 8520 8.5x20mm, que se venden como un conjunto, son perfectos. Los propios motores deben instalarse en el marco en sus agujeros de aterrizaje, lo que debería haberse hecho antes. Idealmente, cuando los motores se sientan apretados en su lugar, sin ningún sujetador adicional.Pero si corta el marco usted mismo y no pudo hacer los agujeros exactos, entonces puede usar superpegamento o pegamento caliente, pero debe hacerlo de tal manera que no altere la distribución del peso.
Además, al instalar motores, uno no debe olvidar que el conjunto incluye dos tipos de motores, uno que gira en sentido horario y el otro en sentido antihorario. Instalar tales motores deben estar uno frente al otro.

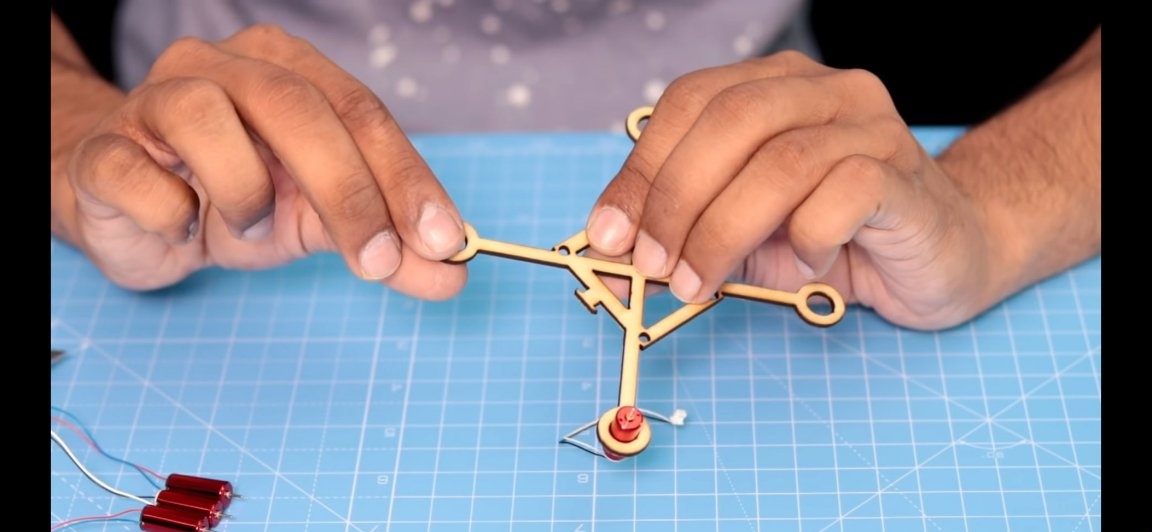
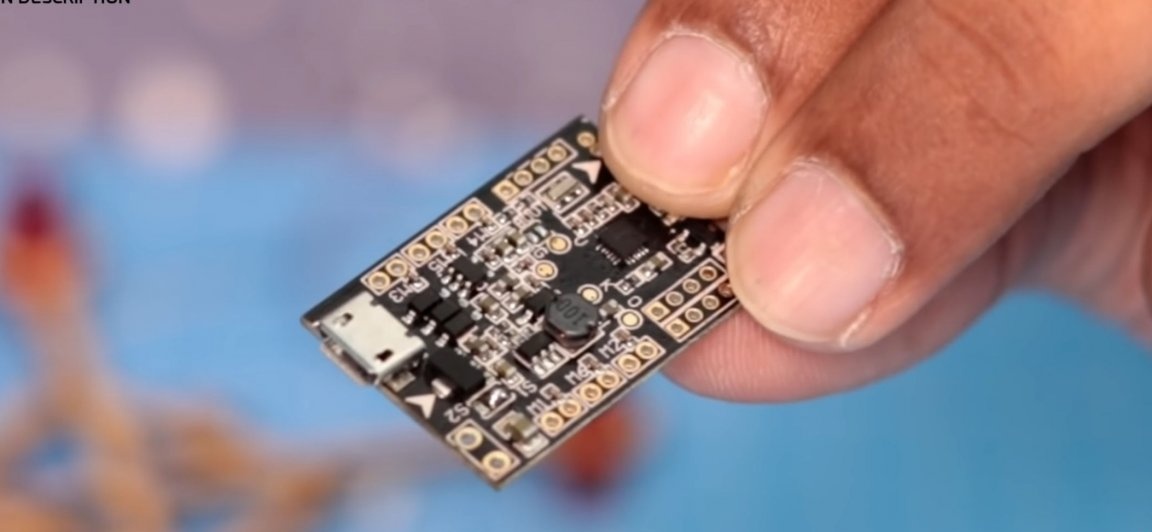
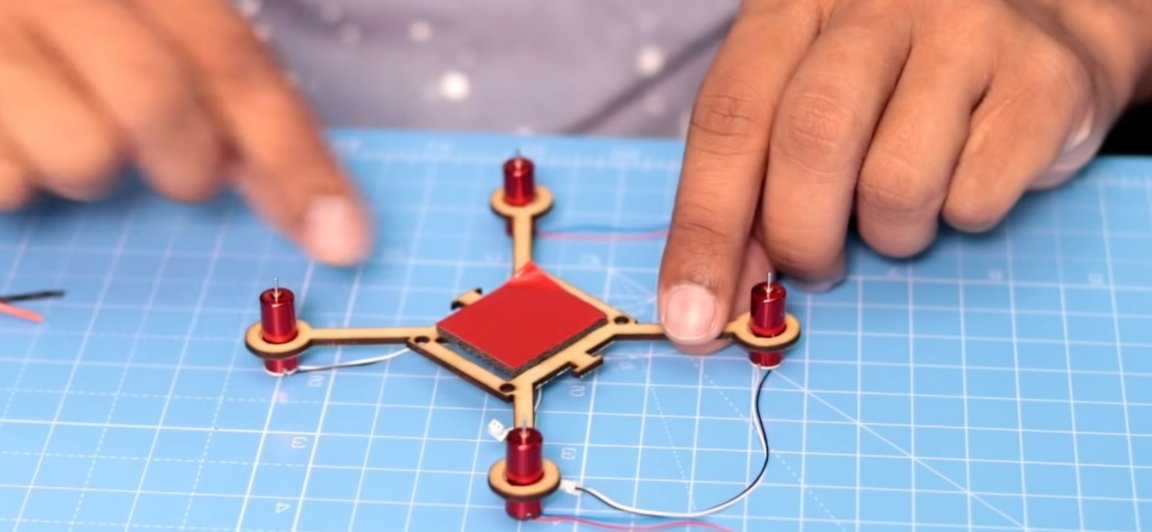
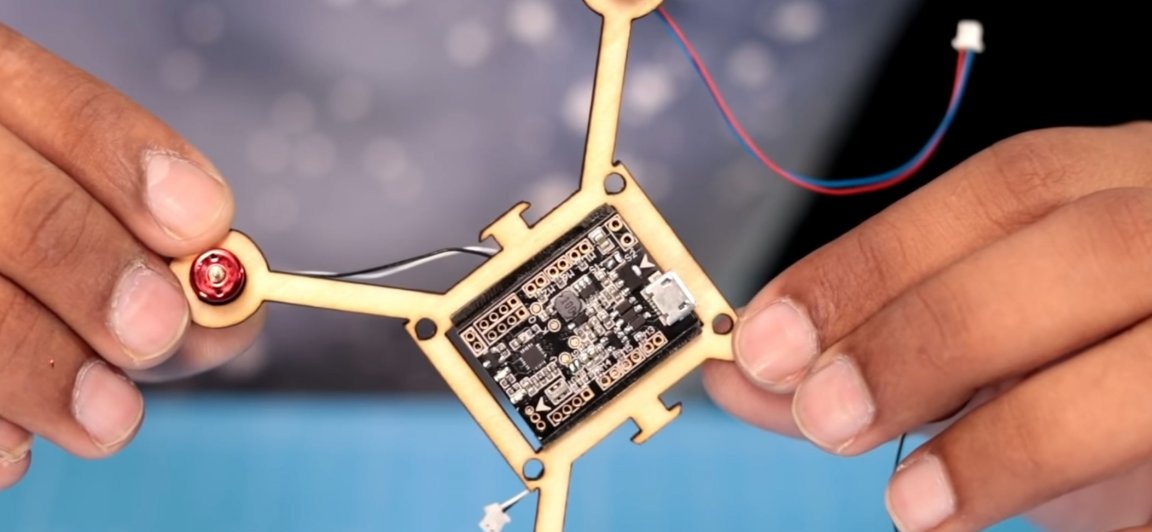
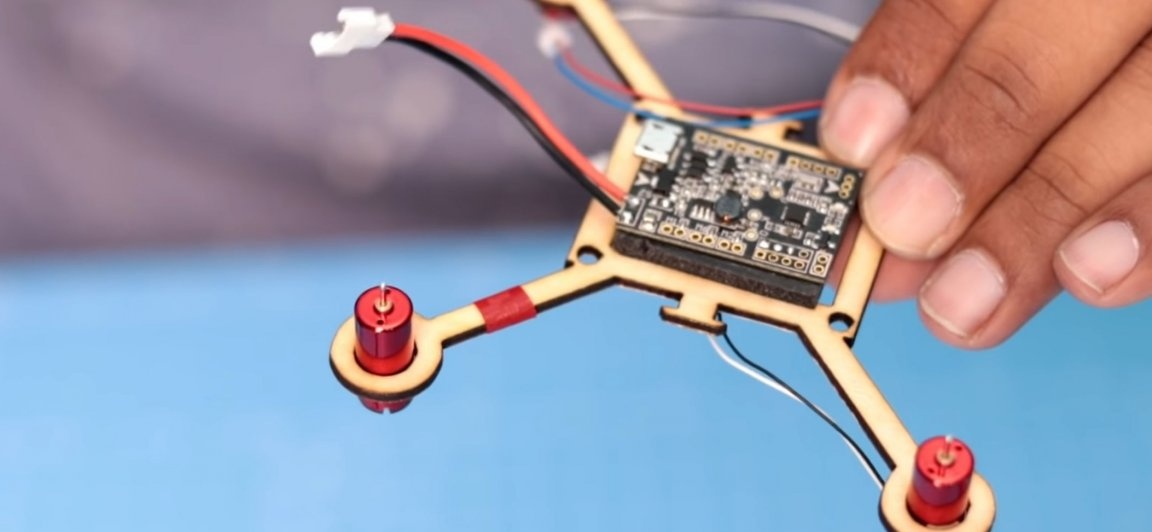
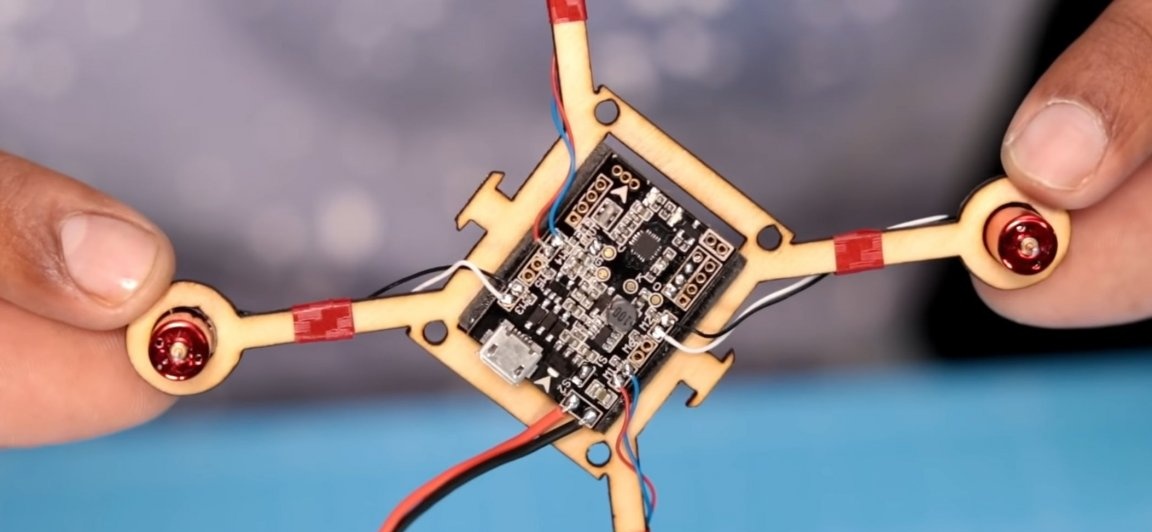
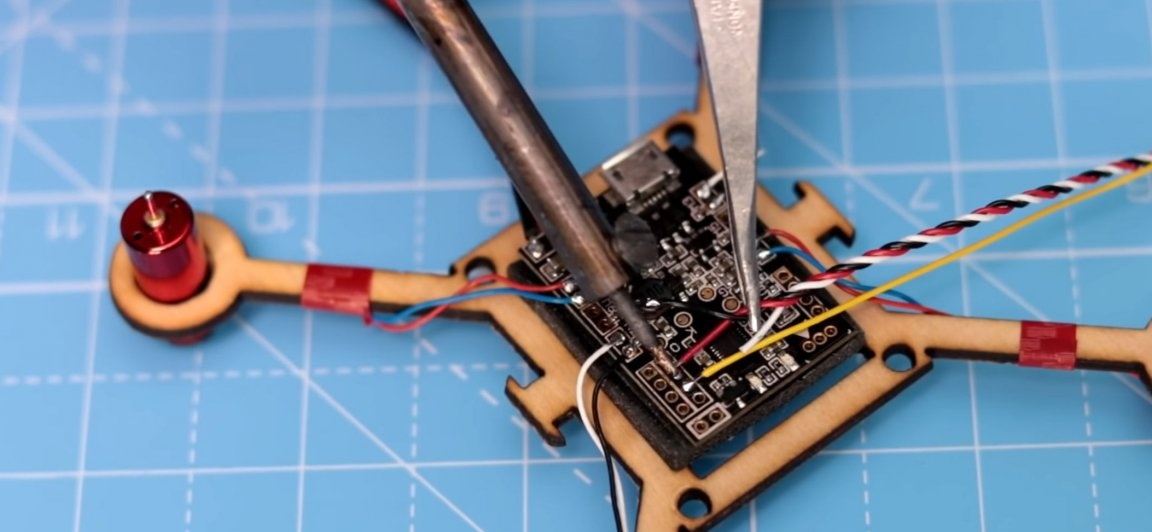
Entonces necesitamos tomar el controlador de vuelo. En este caso, el controlador de vuelo incluye funciones como un controlador de velocidad, una fuente de alimentación para la batería y el propio controlador de vuelo. El controlador de vuelo debe estar conectado exactamente en el centro del cuadro, pero no en un soporte rígido, ya que el exceso de vibración, que en este caso es casi imposible de eliminar, creará interferencia de control adicional. Por lo tanto, una cinta adhesiva doble sobre un sustrato blando es perfecta para esto.

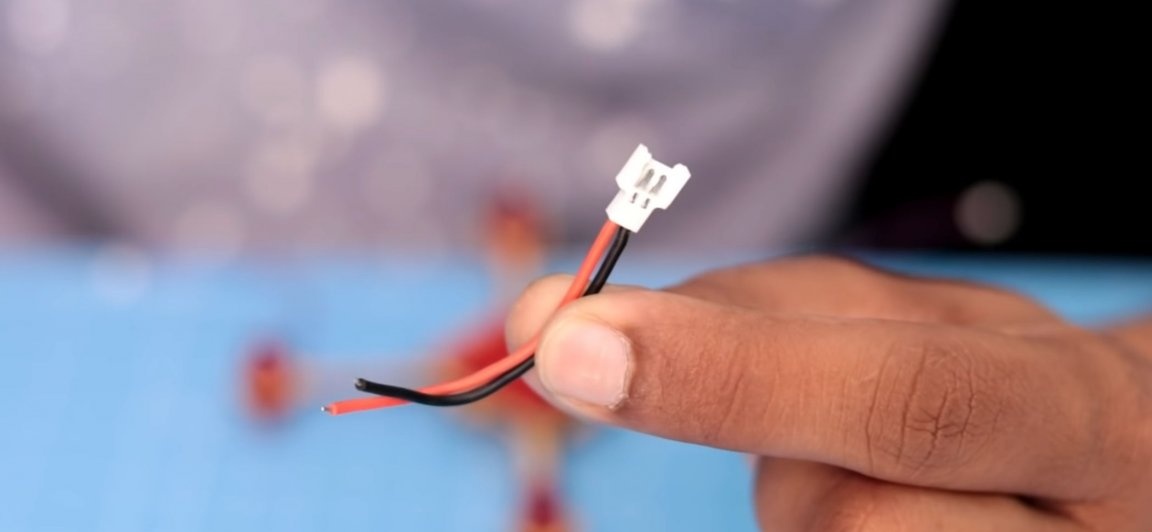
Después de eso, comenzamos a conectar los cables al controlador de vuelo, primero tomamos el conector del formato "madre" (como en la foto a continuación) y lo soldamos a los contactos del controlador de vuelo, es decir, a los contactos seleccionados en el conector de alimentación (más el cable al conector de alimentación).
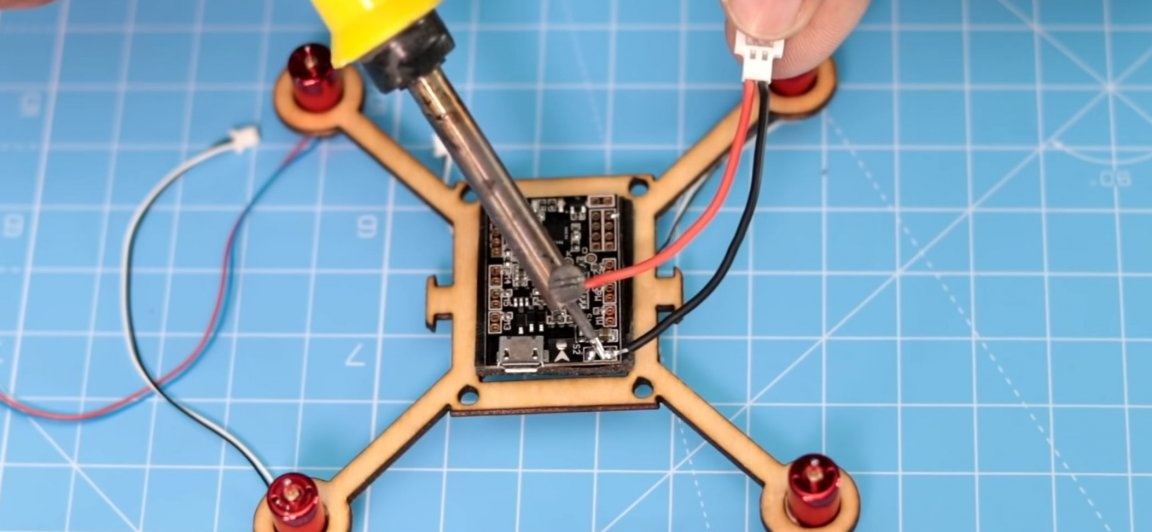
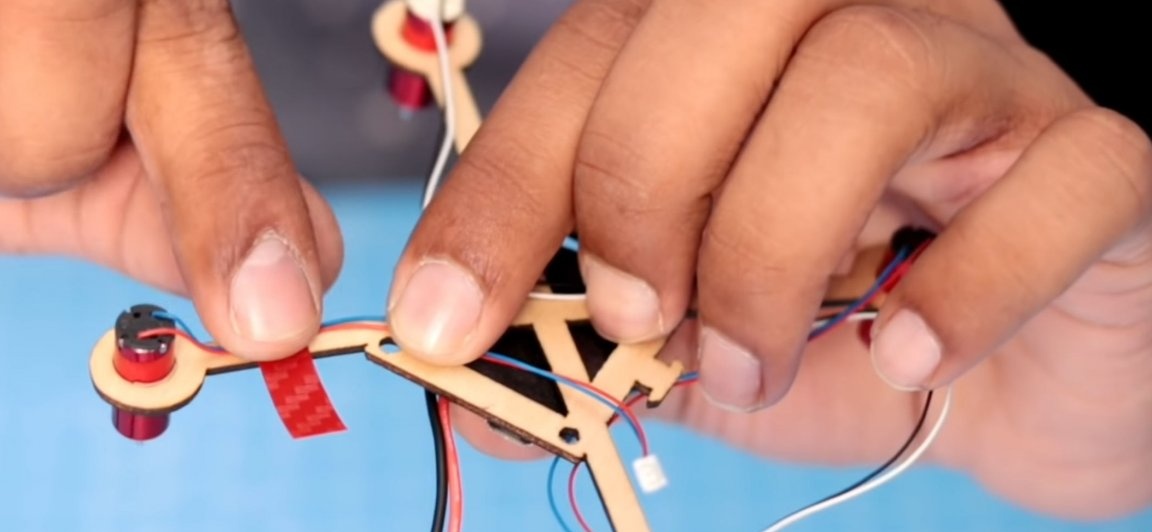
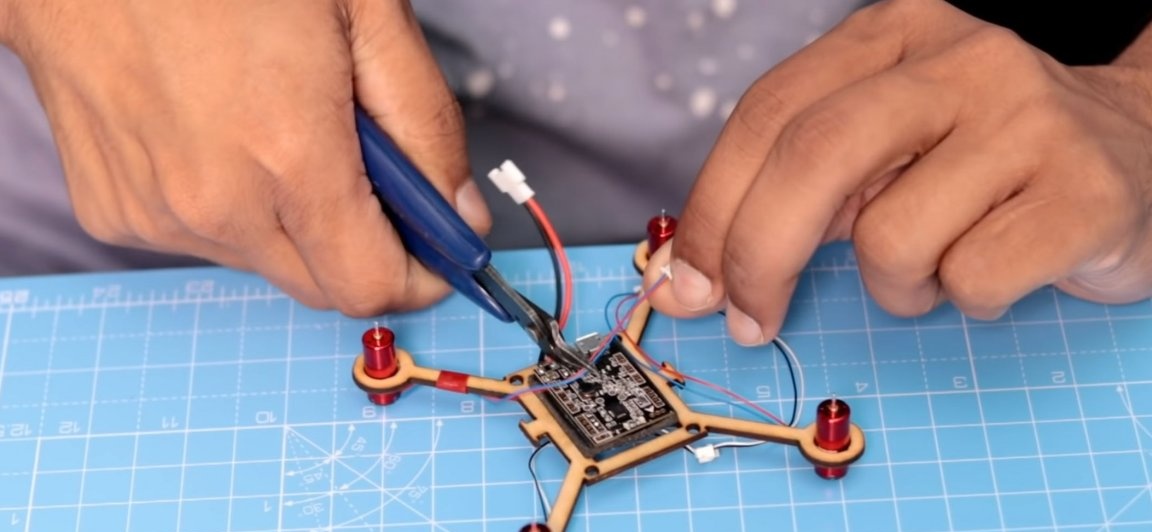
A continuación, los motores previamente instalados deben conectarse al controlador de vuelo. Pero antes de eso, los cables que provienen de los motores eléctricos deben dibujarse cuidadosamente a lo largo del marco y fijarse con pequeños trozos de cinta aislante. Luego, usando los cortadores de alambre, cortamos la longitud extra de los cables y los conectamos a los contactos del controlador de vuelo, que se muestran a continuación. Es importante soldar los cables exactamente como se muestra a continuación.
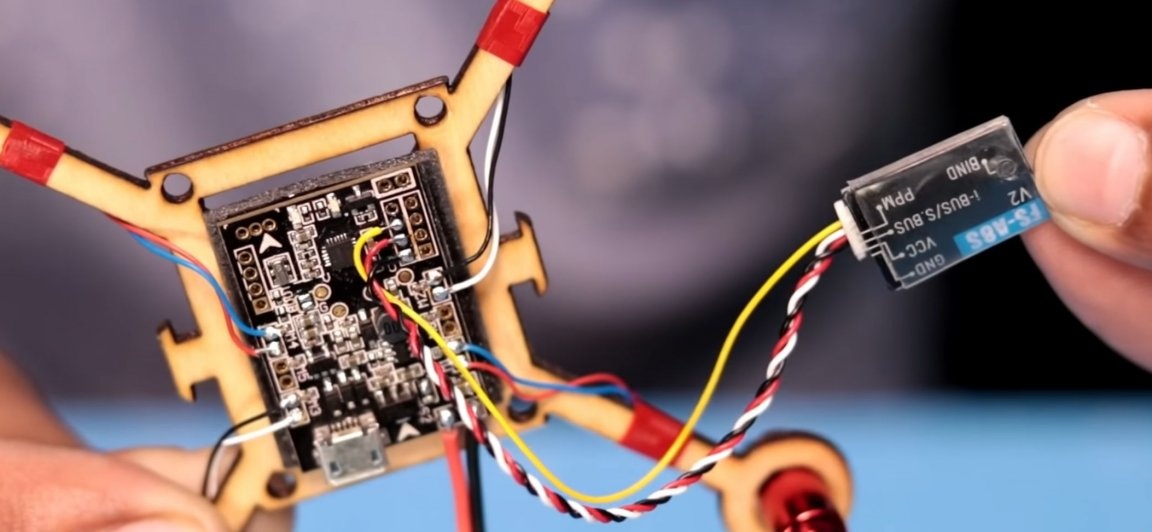
El siguiente paso es tomar el receptor del equipo de control de radio, que también debe estar conectado al controlador de vuelo. (Ver foto a continuación). El receptor, así como el controlador de vuelo, se montan con doble cinta.

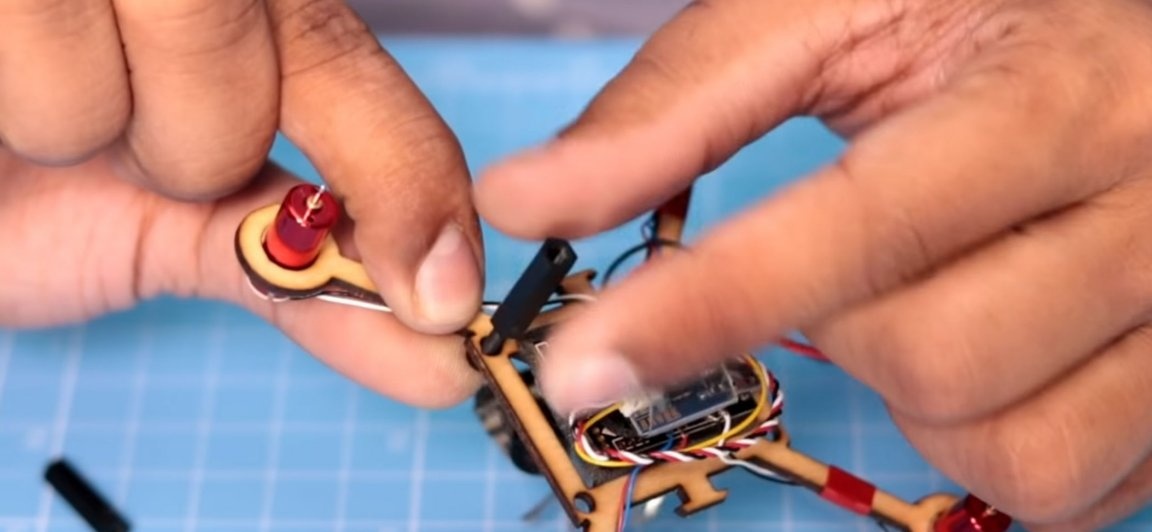
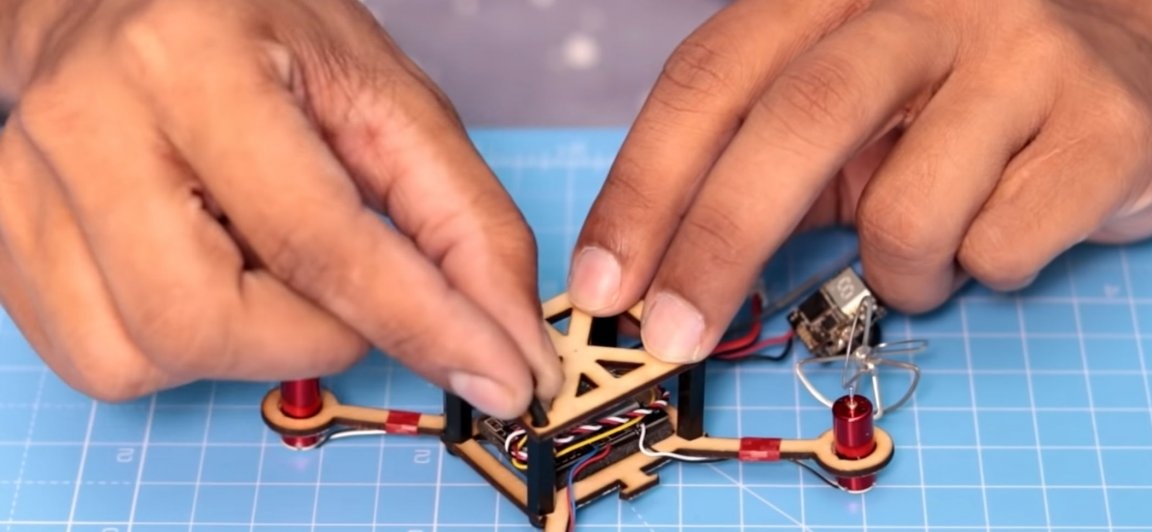
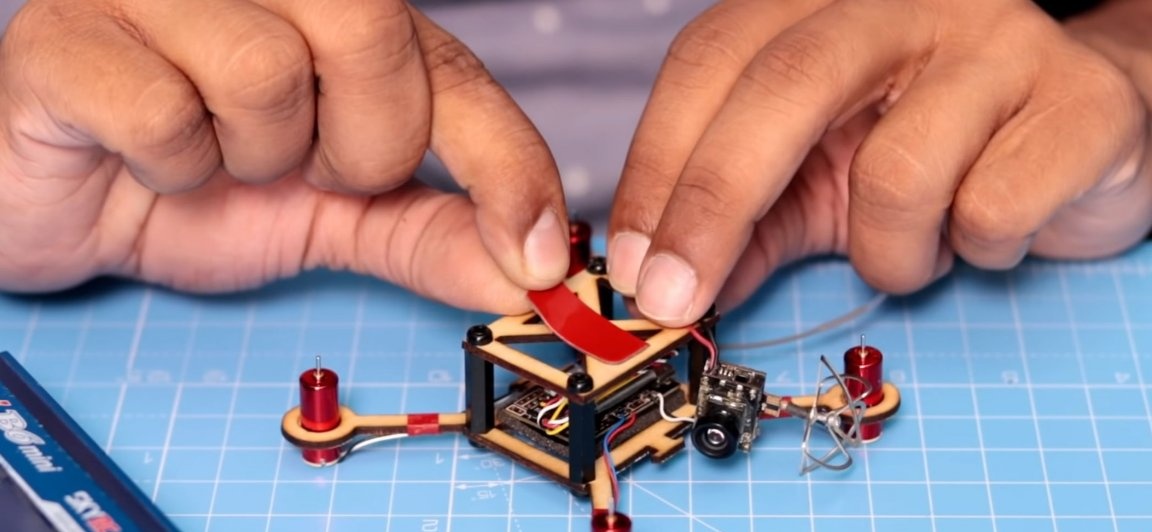
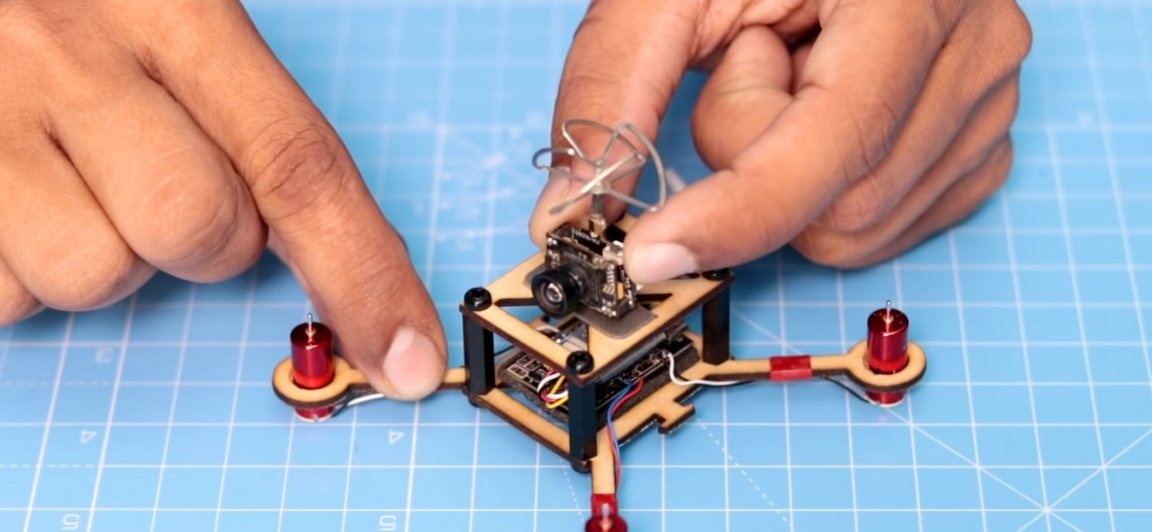
Entonces deberíamos tomar la cámara FPV e instalarla en nuestro quadrocopter. Para instalar la cámara FPV, debemos hacer una plataforma especial para ella sobre el controlador de vuelo. El sitio en sí está cortado del mismo material que el marco para el quadrocopter fue cortado. Para asegurar la almohadilla, se pueden utilizar bastidores para placas de circuito impreso. Atornillándolos y apretándolos primero al marco, y luego uniendo la plataforma, asegurándola con tornillos. Arreglamos la cámara FPV y otros componentes del producto casero con cinta adhesiva doble, en el sitio que acabamos de hacer. Los cables de la cámara están conectados a los cables que provienen de la batería de acuerdo con la polaridad "+" a "+", y "-" a "-".


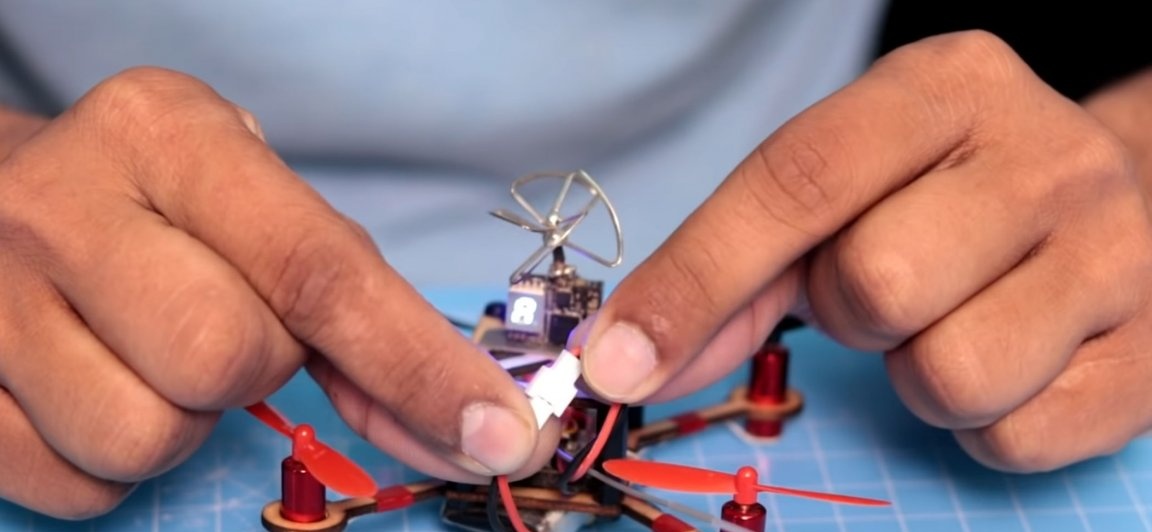
Entonces necesitamos hélices. Es deseable, pero no necesario, que sean de diferentes colores, por ejemplo, dos rojos y dos negros. Esto es necesario para que pueda determinar el "frente" y la "parte trasera" del quadrocopter.




Bueno, al final del ensamblaje, debe fijar la batería en el marco del quadrocopter. Esto también se puede hacer en cinta adhesiva doble o originalmente asegurado con goma, como lo hizo el autor.
Bueno, eso es todo! Has ensamblado tu micro dron. Después del ensamblaje, debe ir inmediatamente a su configuración. Es decir, conectamos la batería al controlador de vuelo, y luego al equipo de control, si el receptor es "legítimo" con el equipo, inmediatamente después de encenderlo deben encontrarse, si no, entonces las instrucciones para su equipo deben describir en detalle cómo hacerlo.


Una vez conectado el equipo con el receptor, procedemos a la configuración. Es decir, debe elevar ligeramente el dron, agregando cuidadosamente gas. Y si se desvía en cualquier dirección, entonces debe aumentar la velocidad del motor específico en qué dirección vuela, y esto debe hacerse hasta que el dron esté lo más estable posible en un espacio confinado y al menos mantenga un punto.
Lo siguiente es la cámara FPV. Recomiendo encarecidamente que si es serio que realmente hará esto y construya este dron para entrenamiento, y luego compre o construya un dispositivo serio, debe comprar inmediatamente un buen casco FPV para no comprarlo en el futuro. Si esto es más un juguete para usted, entonces puede guardar y comprar el mismo receptor FPV que el autor del producto casero.Para comenzar a ver la transmisión en su teléfono inteligente, encienda el dron, luego descargue y abra la aplicación en su teléfono inteligente específicamente (el código QR para descargar la aplicación estará en las instrucciones), conecte el receptor FPV y todo debería funcionar.






Bueno, eso es todo! Como resultado, obtuvimos algo entre un juguete y un simulador para profesionales. Pero en cualquier caso, el producto casero es muy interesante y a todos les gustará.
Puede comprar accesorios que pueden ser útiles para ensamblar este producto casero aquí:
-
-
-
-
-
-
-
Aquí hay un video del autor de la casera:
Bueno, ¡gracias a todos por su atención y buena suerte en futuros proyectos, amigos!