
Recientemente he construido docenas de robots, en su mayoría inspirados por las maravillas de la robótica BEAM. Si no está familiarizado con esta tecnología, BEAM es un método especial para construir robots con énfasis B - biología, E - electrónica (electrónica), A- estética (estética) y M - mecánica (mecánica). Este es el acrónimo BEAM. Lo que separa esta tecnología de otros enfoques es el uso de solo energía de radiación para la nutrición (principalmente energía solar), la eliminación de diversos materiales (reutilización) y el minimalismo. Aunque he adoptado estos principios, el mío robots no estaban del todo en el espíritu de BEAM (estaban alimentados por una batería).
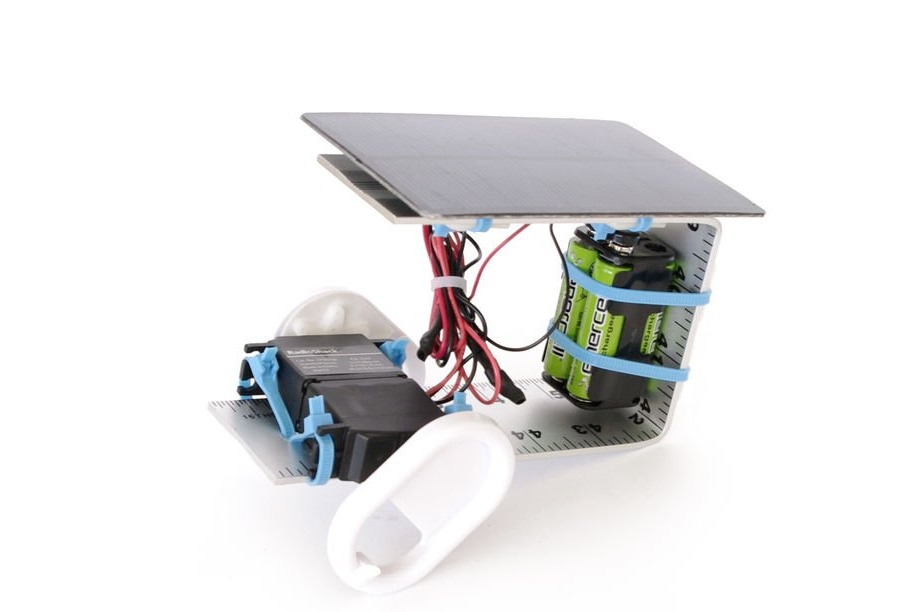
Como la robótica BEAM me inspiró en serio, quería hacer un robot con energía solar. Pero en lugar de simplemente hacer un robot BEAM, decidí integrar un panel solar en el robot de mi estilo habitual. En lugar de estar totalmente alimentado por el sol, decidí construir baterías recargables. Es decir, mi robot puede alimentarse con una batería o con un panel solar, dependiendo de la fuente de alimentación que sea más potente actualmente. El panel solar también carga las baterías cuando la luz del sol lo golpea. Esto permite que el robot se mueva tanto a la luz como a la sombra.
Creo que este enfoque combina con éxito dos estilos, y este es un experimento interesante en la construcción de robots.
Paso 1: materiales
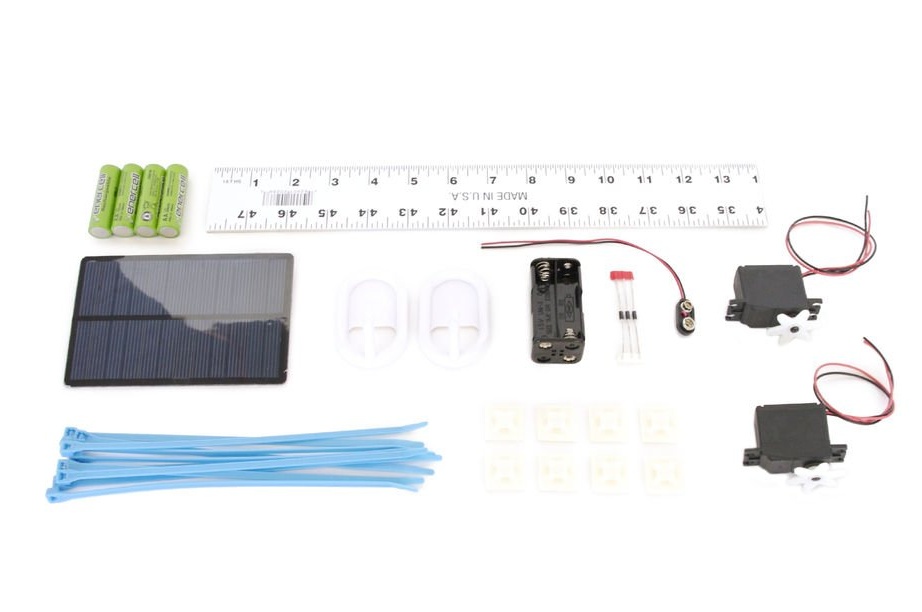
Necesitarás:
(x1) Panel solar
(x2) Servomotores estándar
(x3) Diodos Schottky 1N5817 - NTE578 equivalente
(x1) batería de 9V
(x8) Baterías AA recargables
(x1) 8 x batería AA
(x12) Base para abrazaderas
(x1) Regla (30-50 cm)
(x2) Ganchos adhesivos de pared
(x1) abrazaderas de plástico
(x1) Tubo termorretráctil
Paso 2: modifica el servo

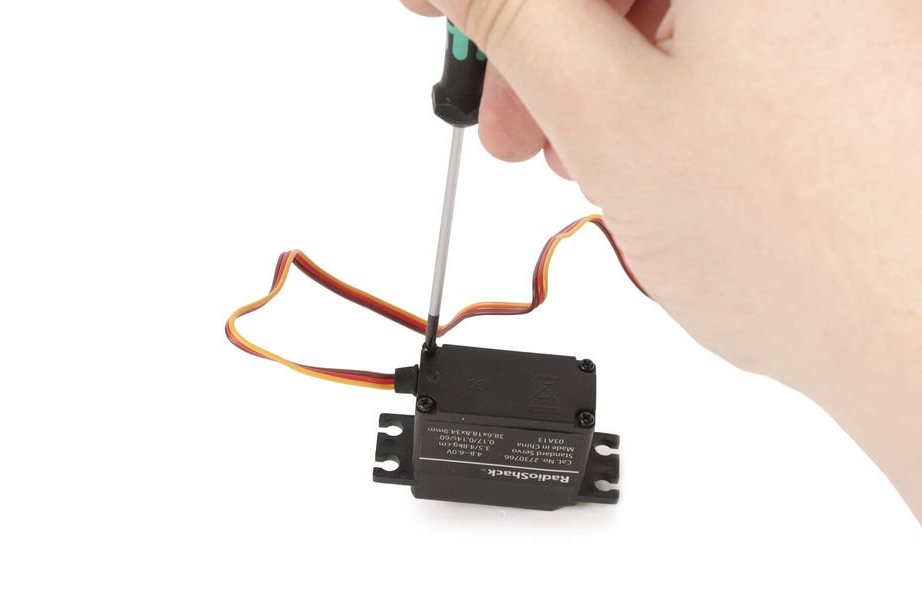
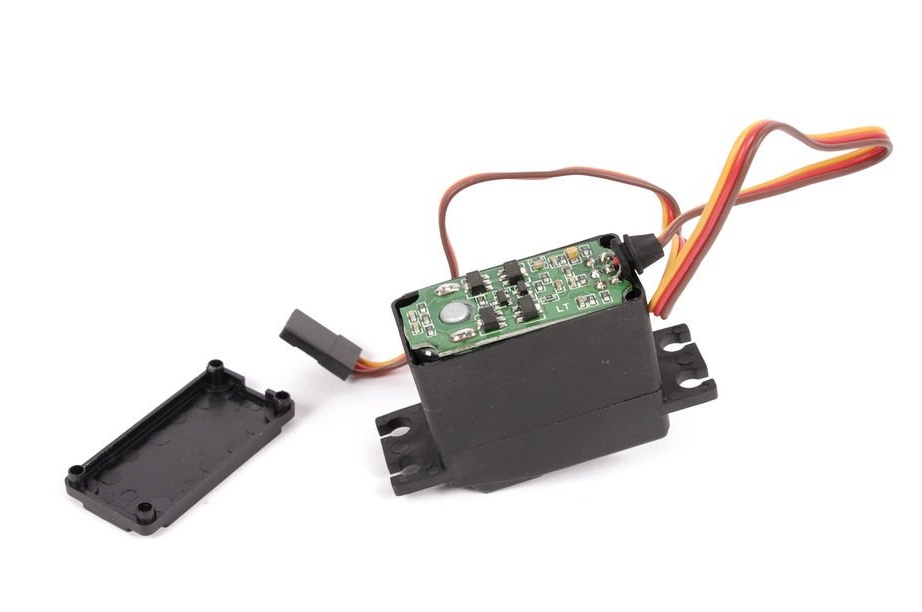
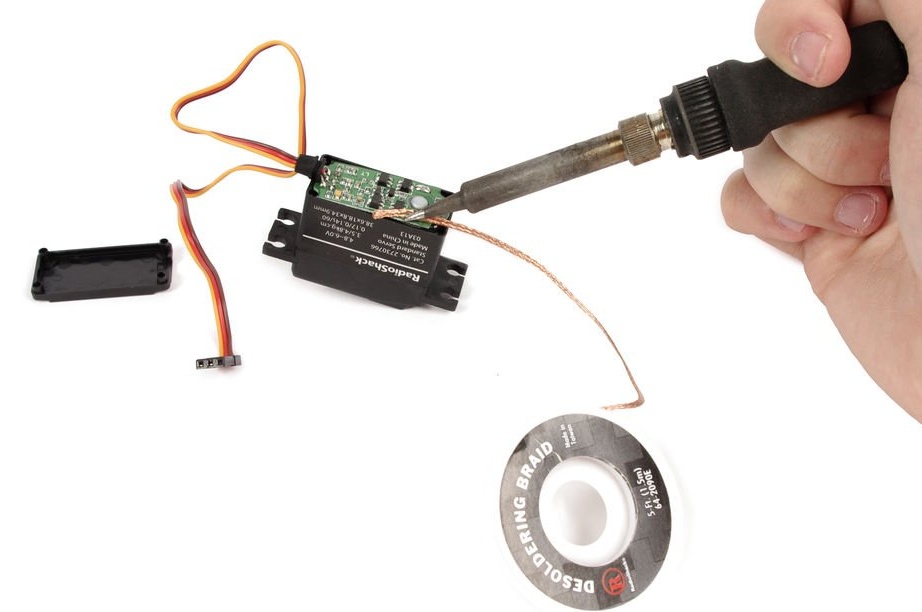
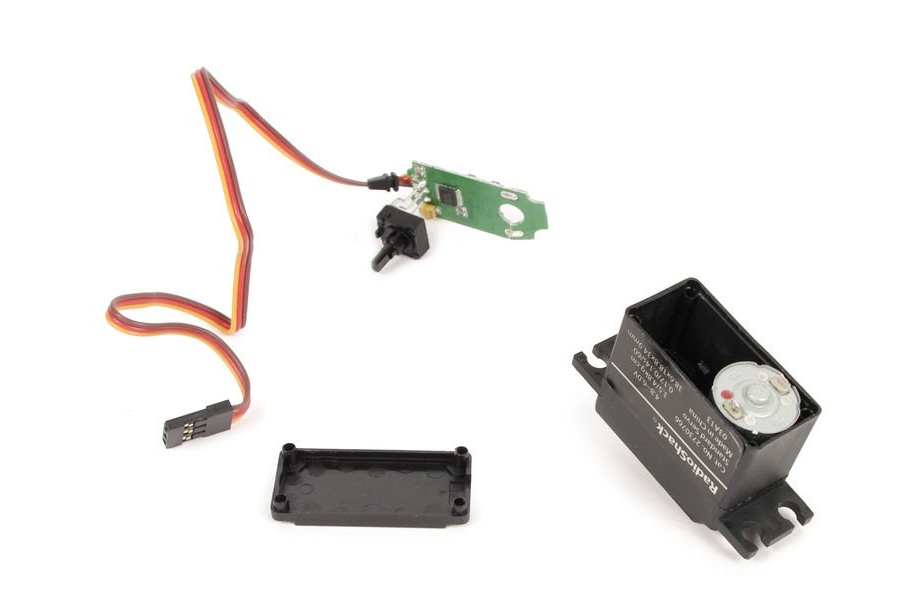




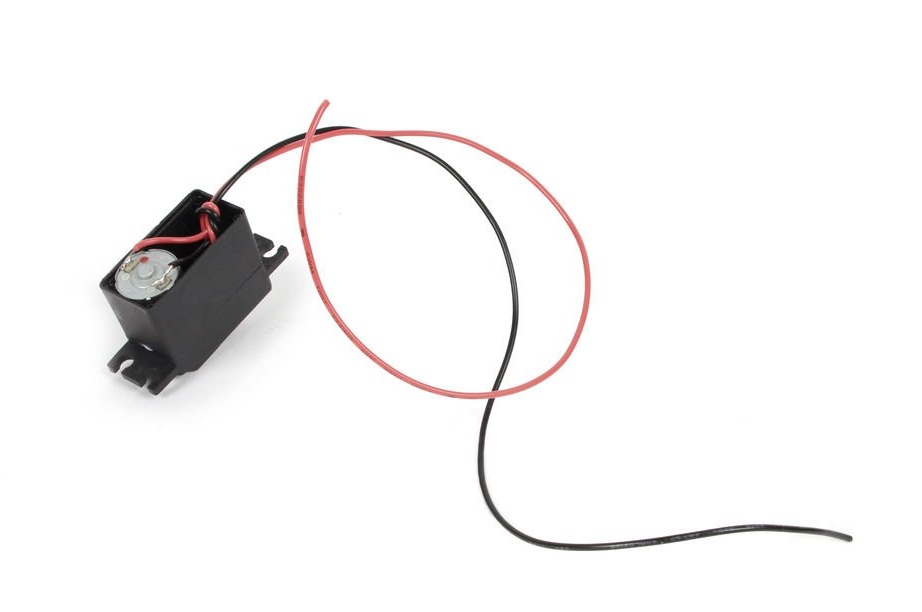

Abra la carcasa del servo destornillando 4 tornillos en el panel inferior. Descomprima la placa dentro y conecte el cableado rojo y negro a cada terminal de la unidad.
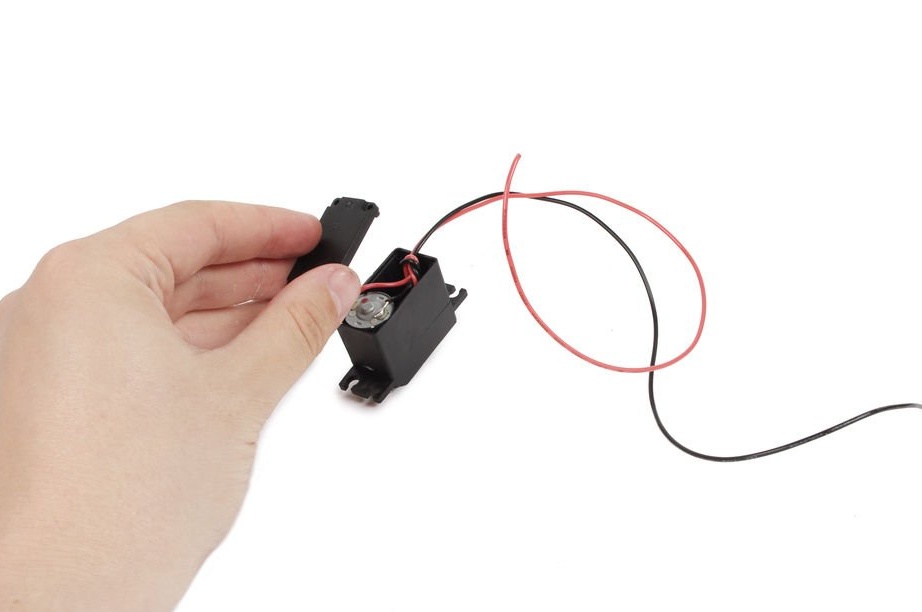
Abra el engranaje y encuentre el engranaje con una pequeña tapa de plástico que evita la rotación continua. Cortar la tapa del engranaje.
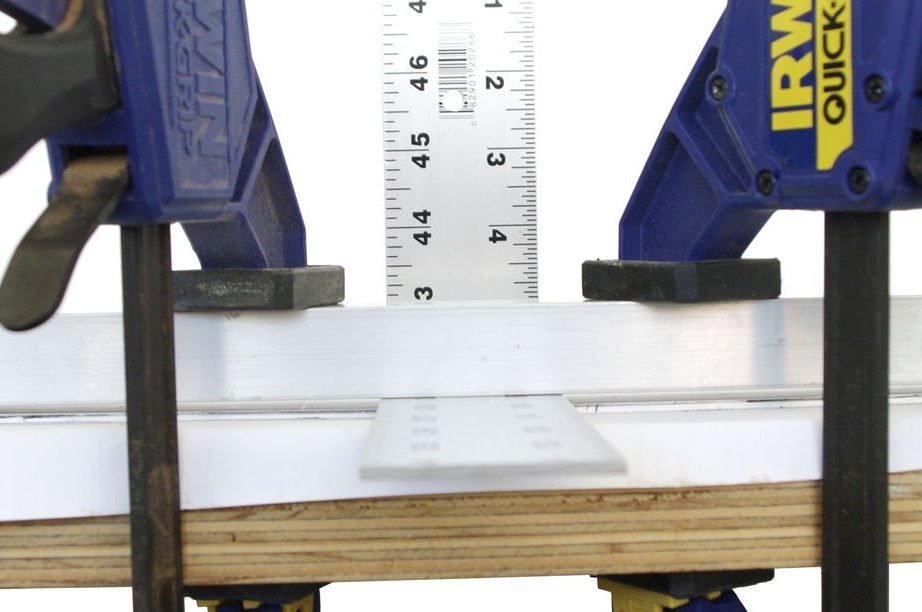
Paso 3: taladro
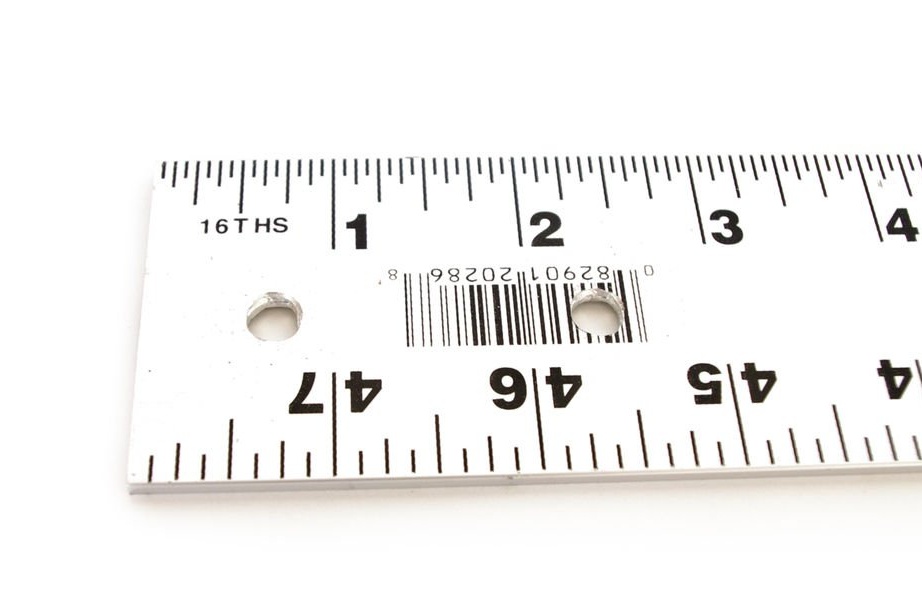



Taladre un agujero de un cuarto de pulgada (6,3 mm) en el centro de la regla, a unos 15 mm del borde corto. Taladre un segundo orificio a unos 60 mm del mismo borde.
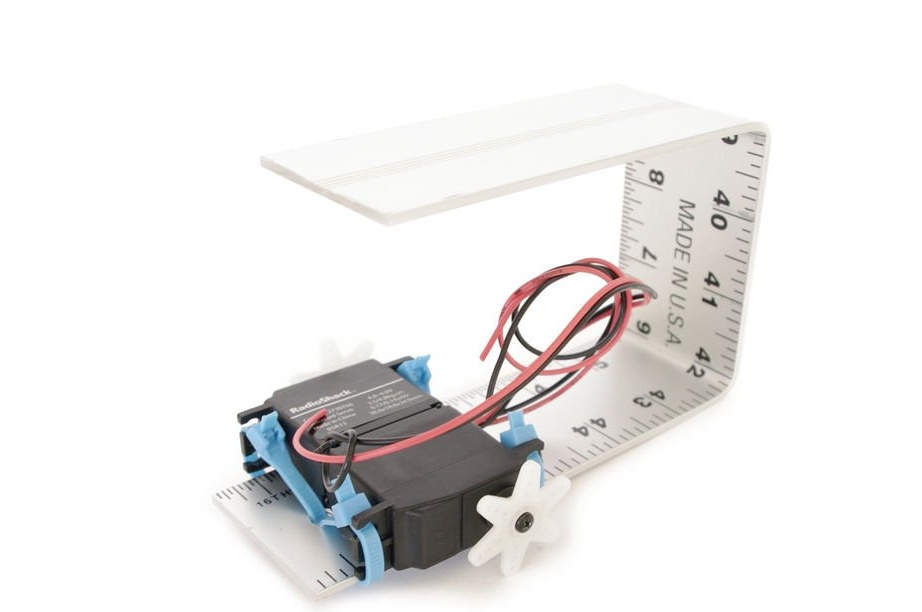
Paso 4: doble

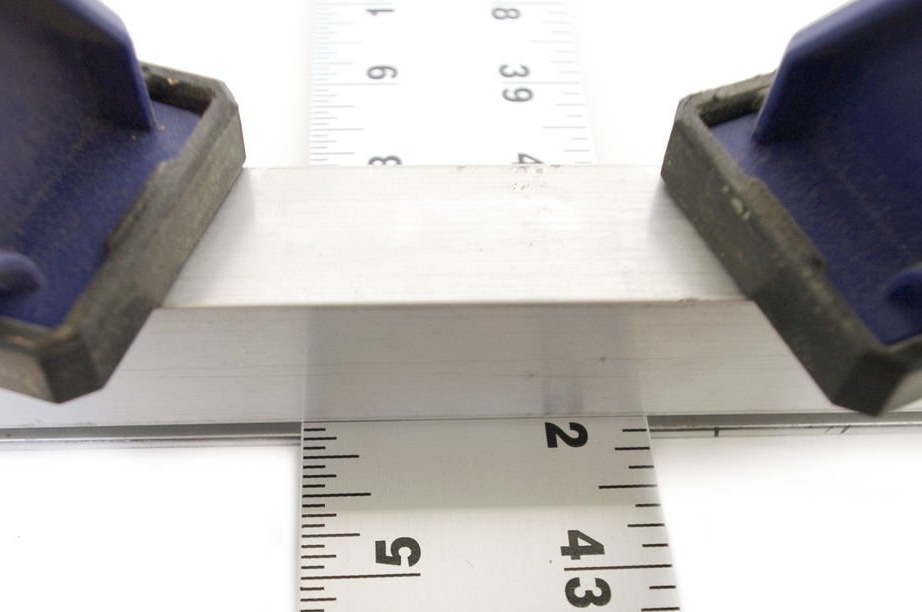
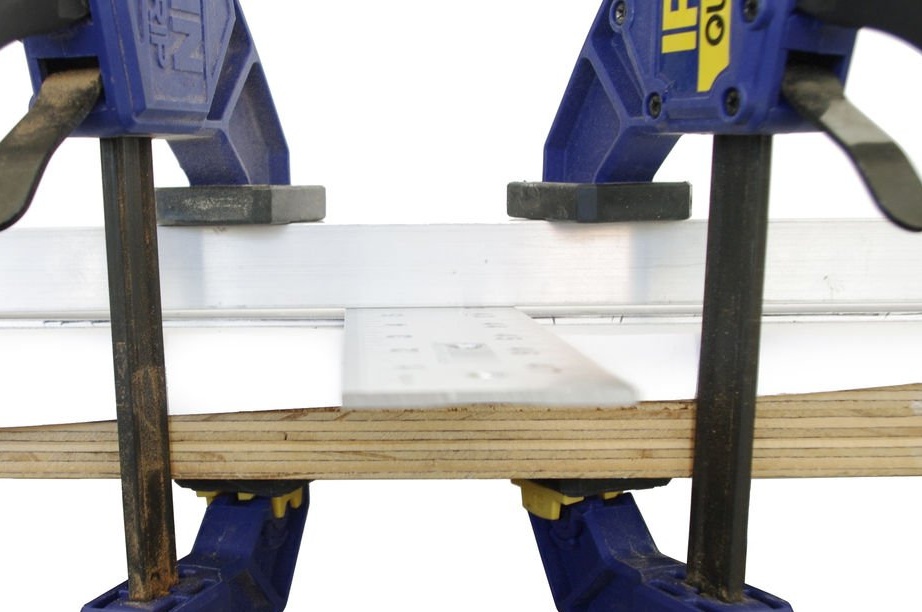
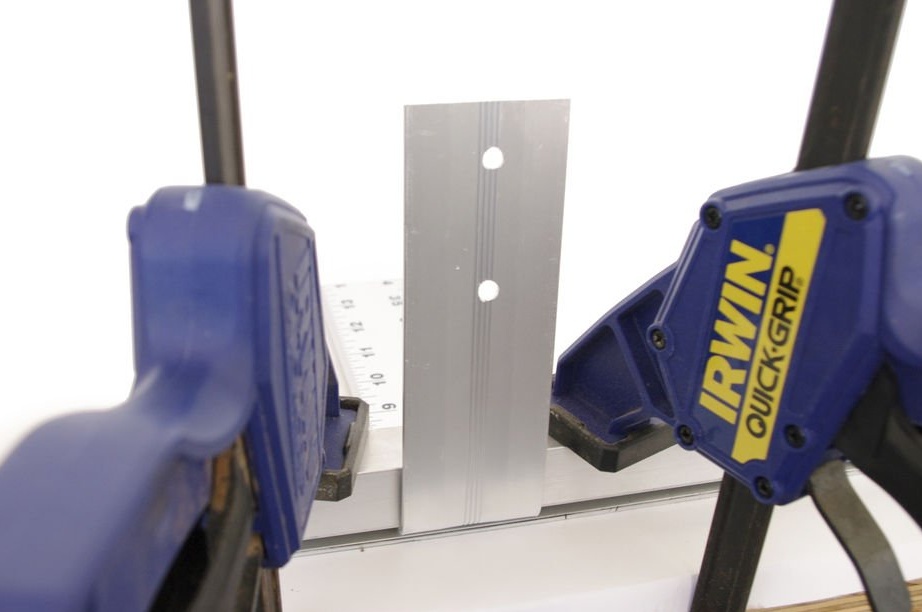

Usando un tornillo de banco o dos placas de metal fijadas en el borde de la mesa, doble la regla en un ángulo de 90 grados a una distancia de 15 cm del borde en el que se perforaron los agujeros.
Haga la misma curva en un ángulo de 90 grados a una distancia de 15 cm del otro borde. Obtendrá una figura en forma de letra P.
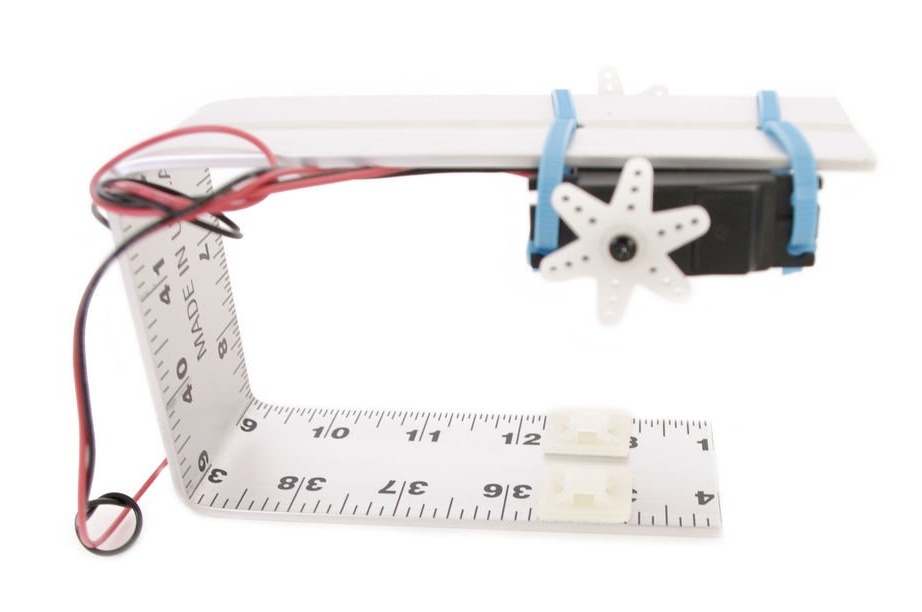
Paso 5: conexión

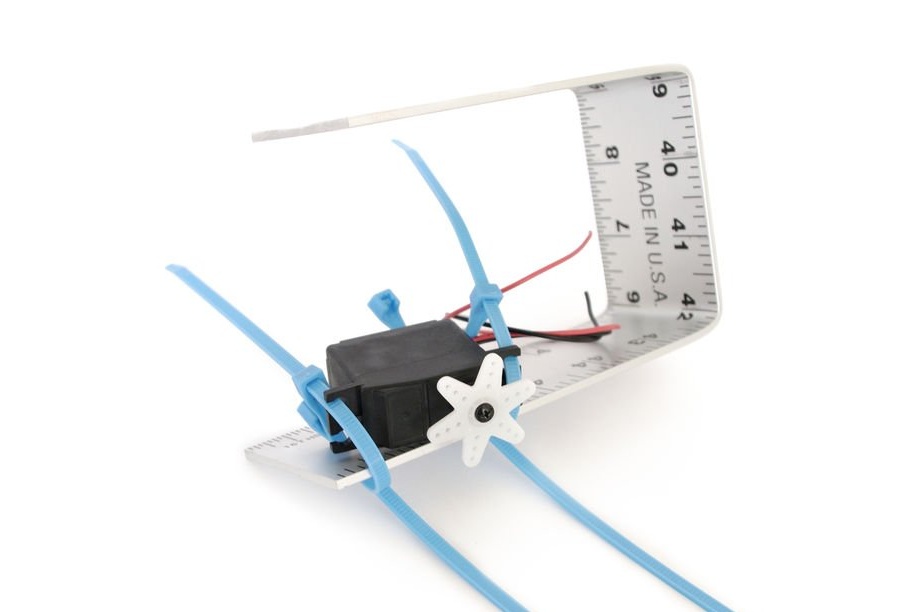
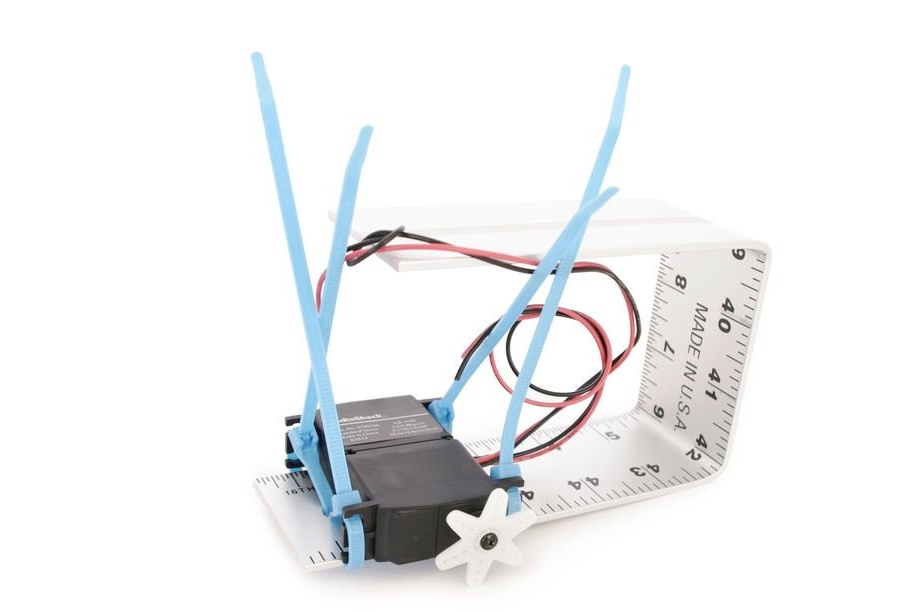
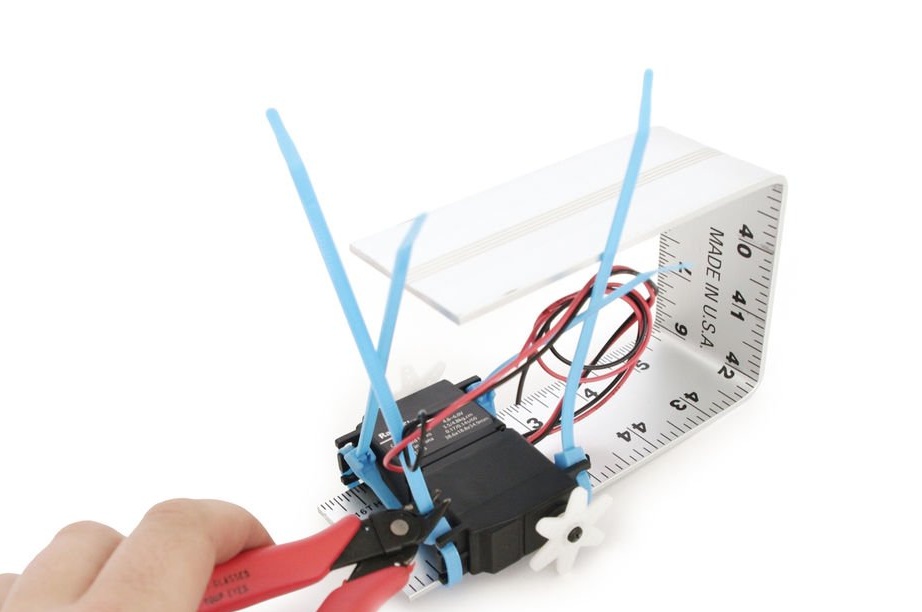
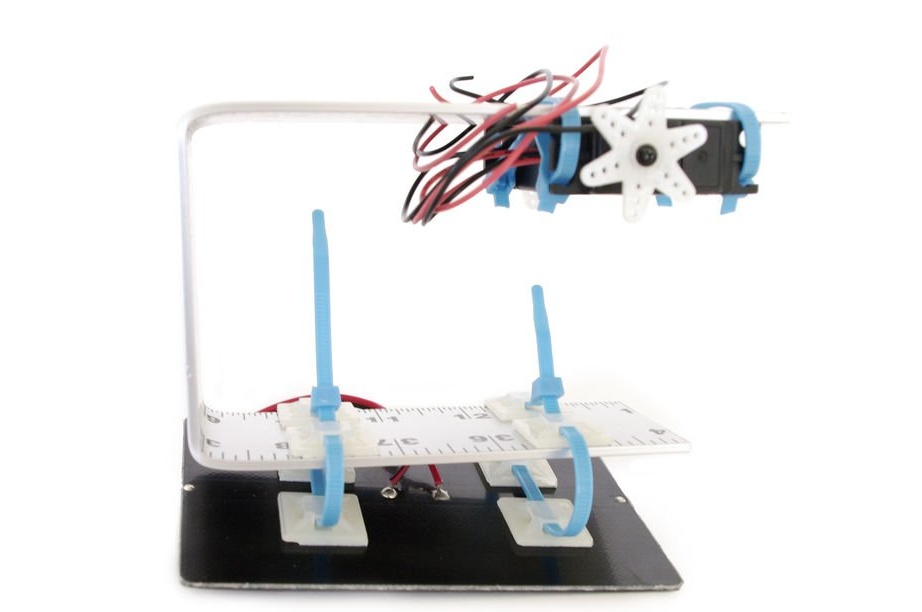
Es necesario fijar los servos en la línea con abrazaderas de plástico, a través de agujeros perforados. Los servomotores deben sentarse de espaldas el uno al otro.
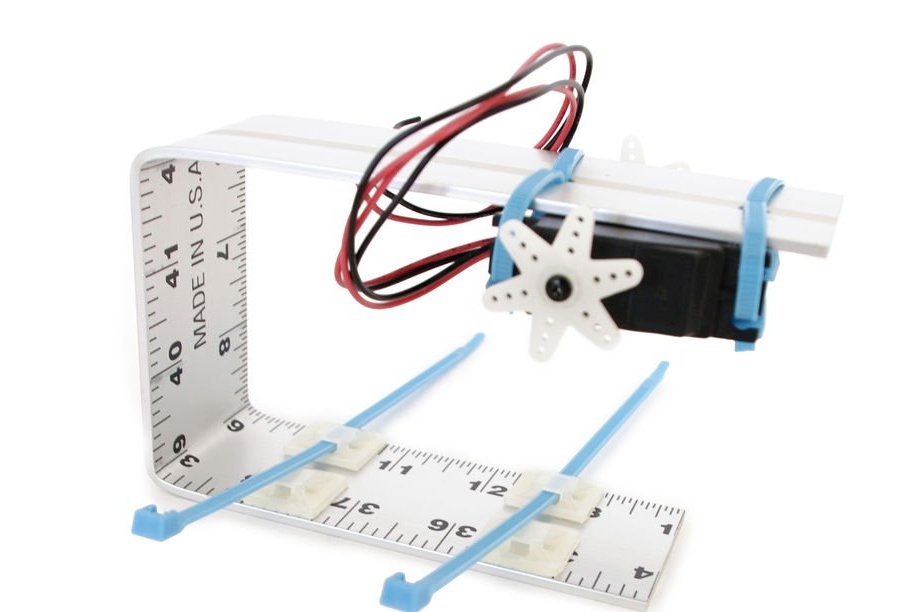
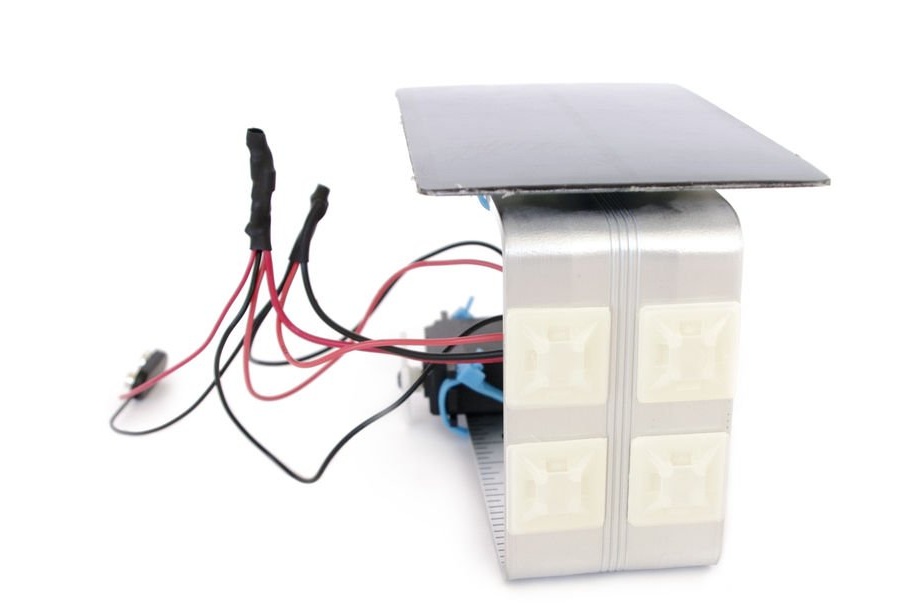
Paso 6: Base para abrazaderas
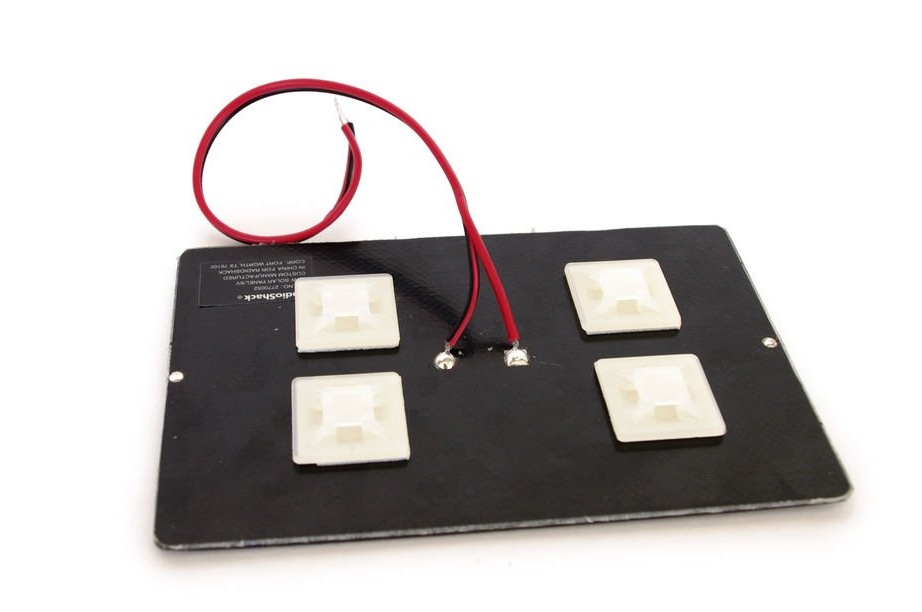

Coloque dos pares de bases de abrazadera una al lado de la otra en la parte posterior del panel solar. Es importante que los canales de cada par estén en la misma línea.
Paso 7: más razones
Adjunte dos bases más al interior de la barra en U, al lado opuesto a los servos.
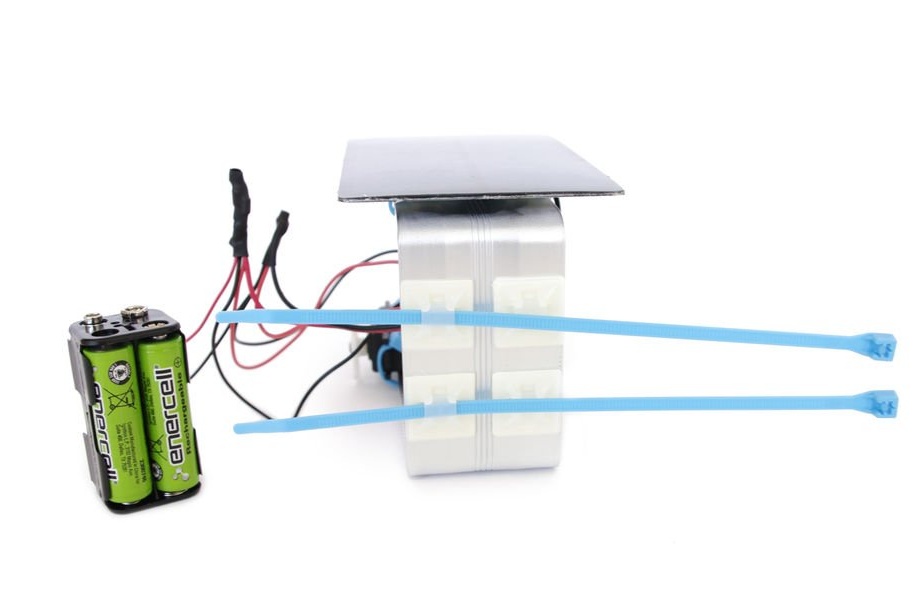
Paso 8: conexión
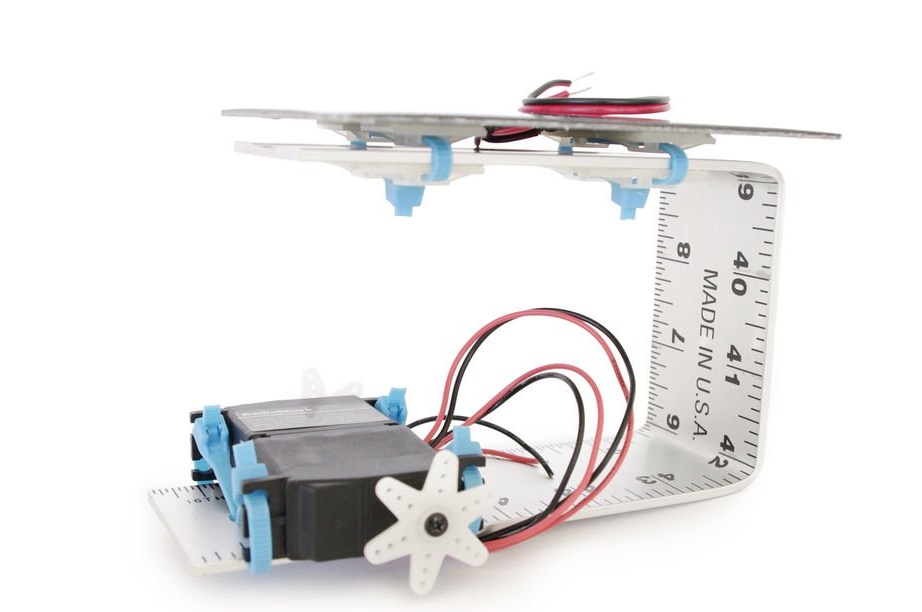
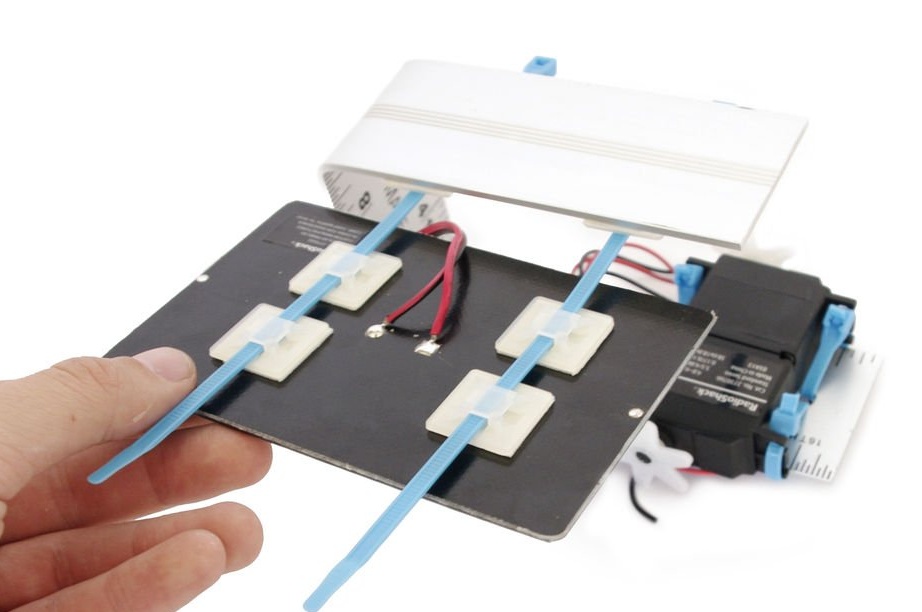
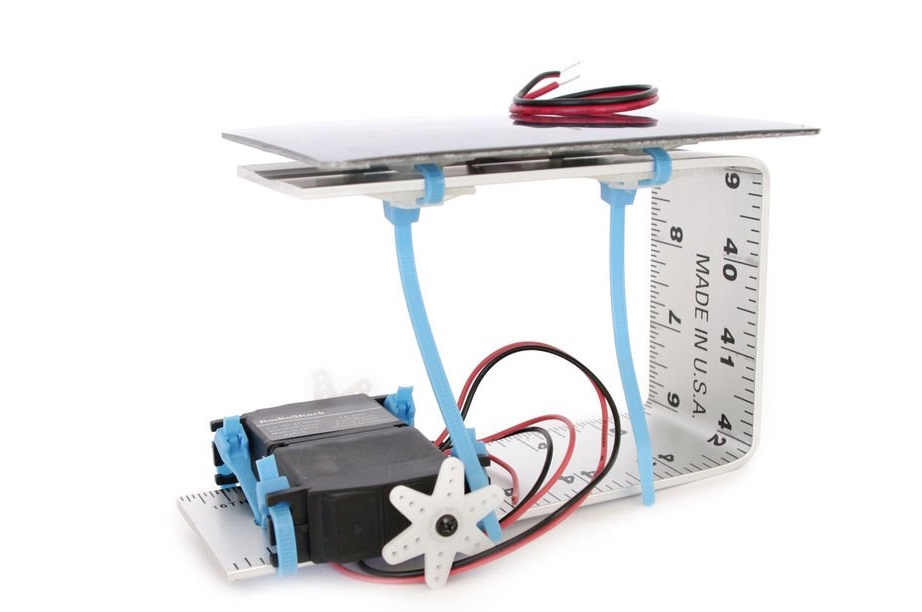
Fije el panel solar con abrazaderas a través de bases fijas.
Paso 9: inserte las baterías


Inserte las baterías en la batería.
Paso 10: diodos

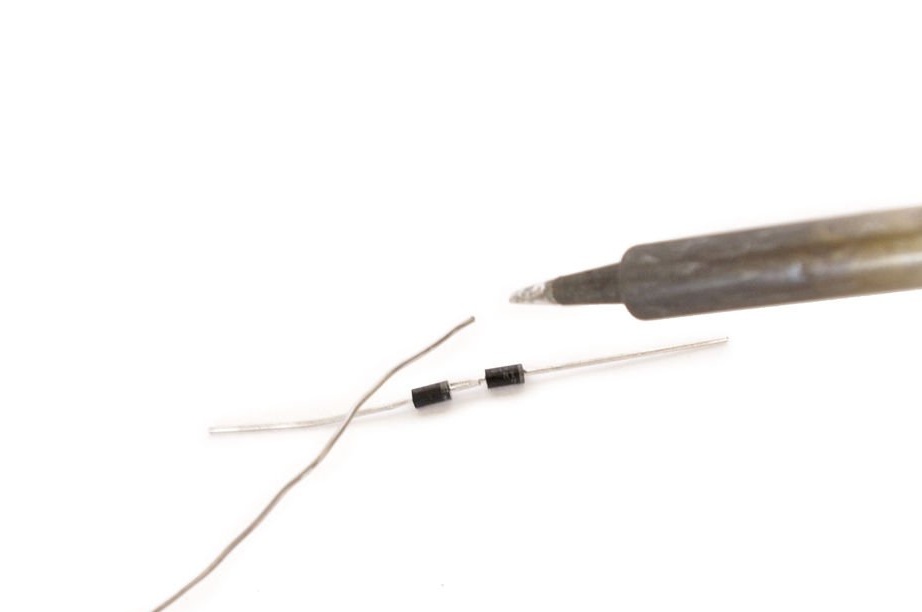
Suelde los dos diodos junto con los cátodos (lado de los diodos con la pista).
Paso 11: montaje de la cadena
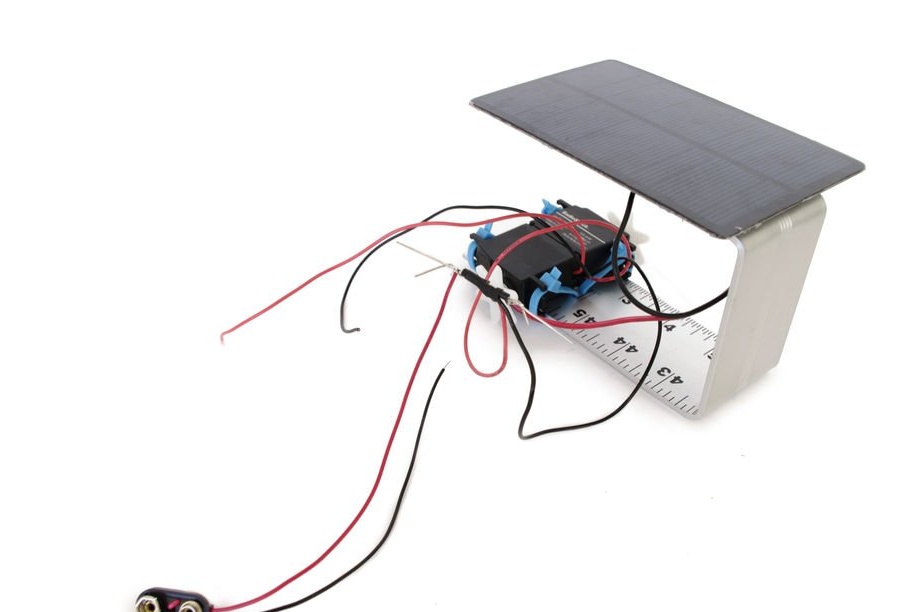
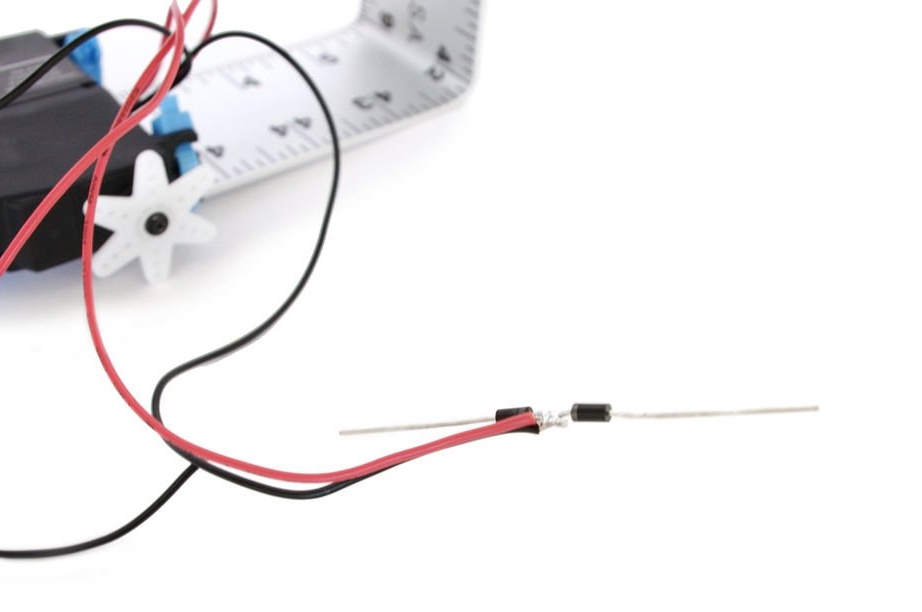
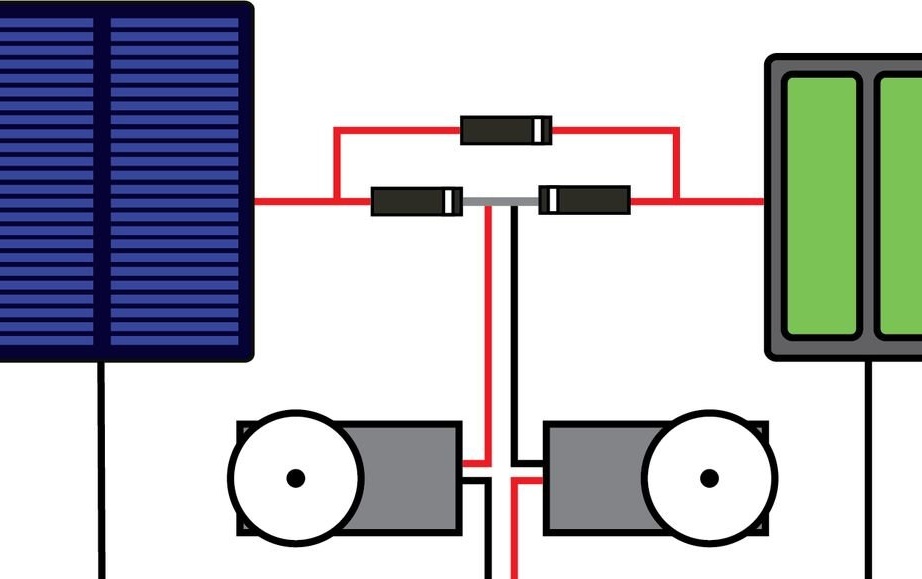
El circuito de este robot se basa en el sencillo circuito de carga solar de David Cook. El circuito contiene dos diodos Schottky conectados al cátodo a cátodo, un diodo conectado al panel solar y una de las baterías. Esta configuración le permite recibir energía tanto de las baterías como del panel solar, según las condiciones.
Como las baterías son recargables, un tercer diodo Schottky está conectado directamente desde el panel solar al compartimento de la batería para cargar las baterías del sol.
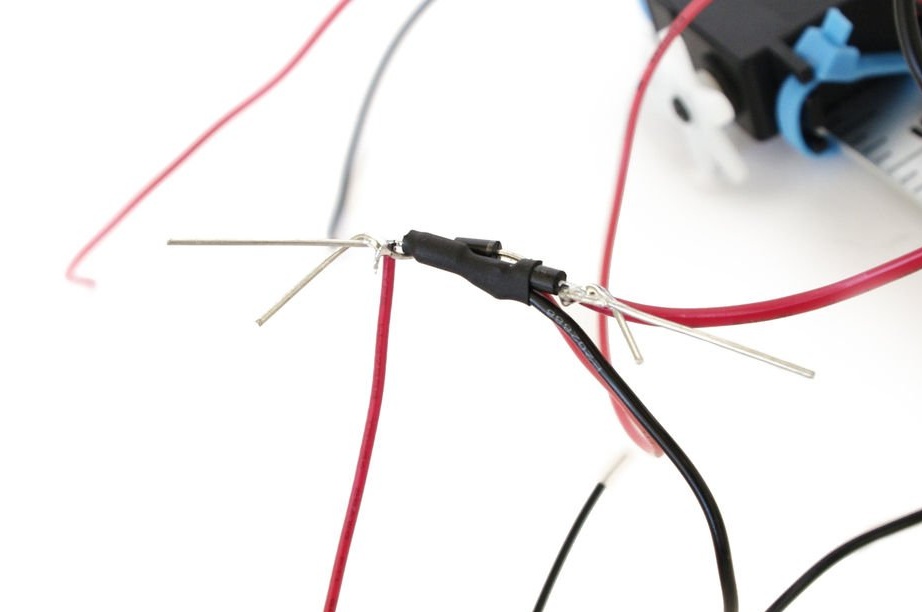
Para conectarlo todo, conecte el cable rojo de uno de los servos y el cable negro del otro al punto central de la conexión del cátodo.
A continuación, conecte el cable rojo desde el terminal de la batería al ánodo de uno de los diodos Schottky. Conecte el cable rojo del panel solar al ánodo en otro diodo.
Ahora suelde el ánodo del tercer diodo al cable rojo que está conectado al panel solar, y el cátodo al cable rojo desde el terminal de la batería.
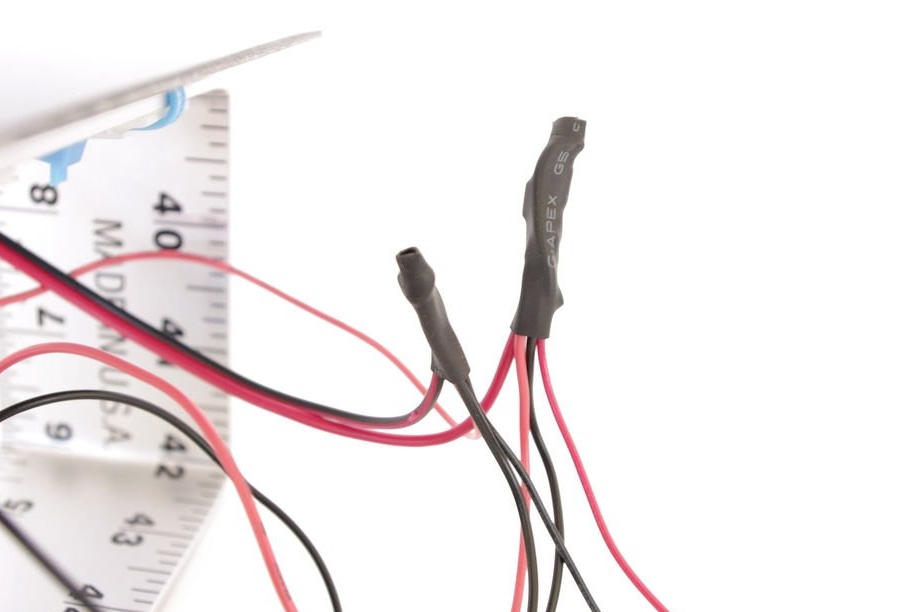
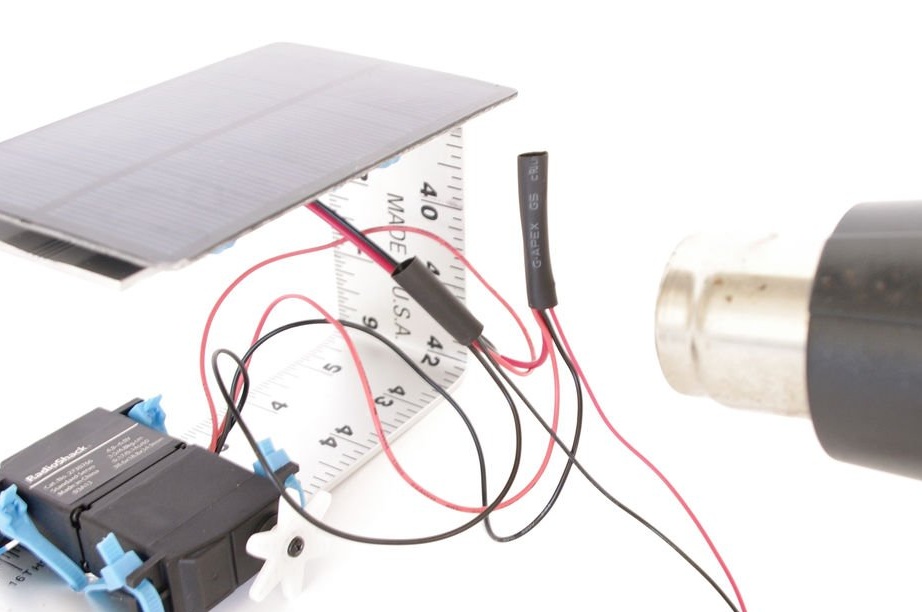
Envuelva todos los cables con tubos termocontraíbles para proteger el circuito de cortocircuitos.
Paso 12: algunos cables más
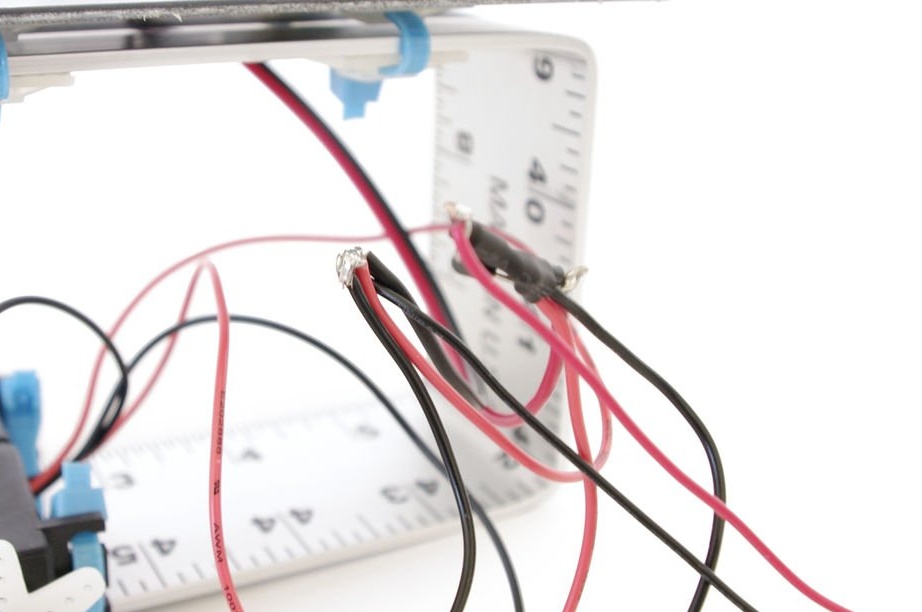
Suelde todos los cables negros y los cables rojos libres restantes de los servos.
Consigue dos juntas soldadas; uno para el poder y otro para la conexión a tierra. Envuelva ambas juntas con tubos termocontraíbles o cinta aislante.
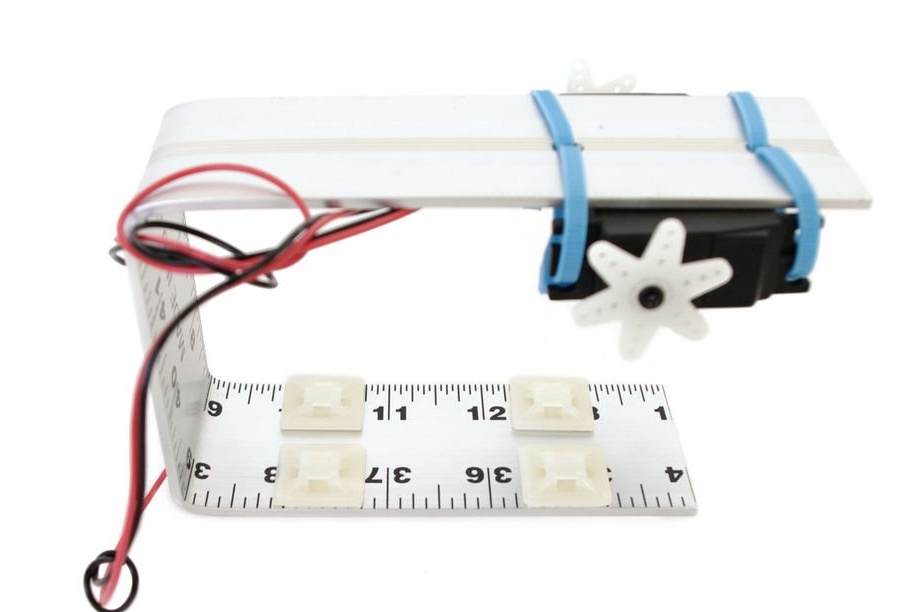
Paso 13: y algunas razones más para las abrazaderas
Sujete dos pares de bases a la parte inferior de la regla curva en forma de U.
Paso 14: Asegurar las baterías
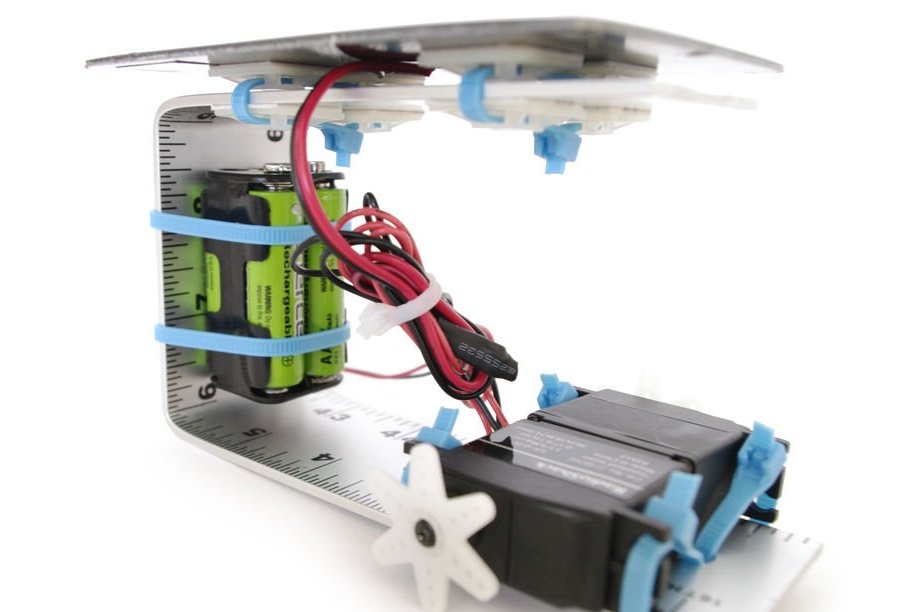
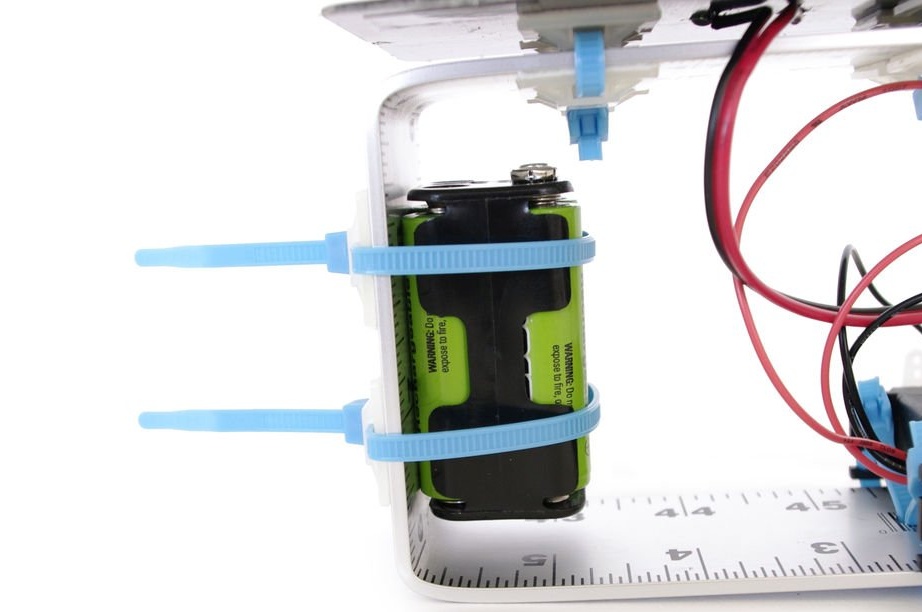
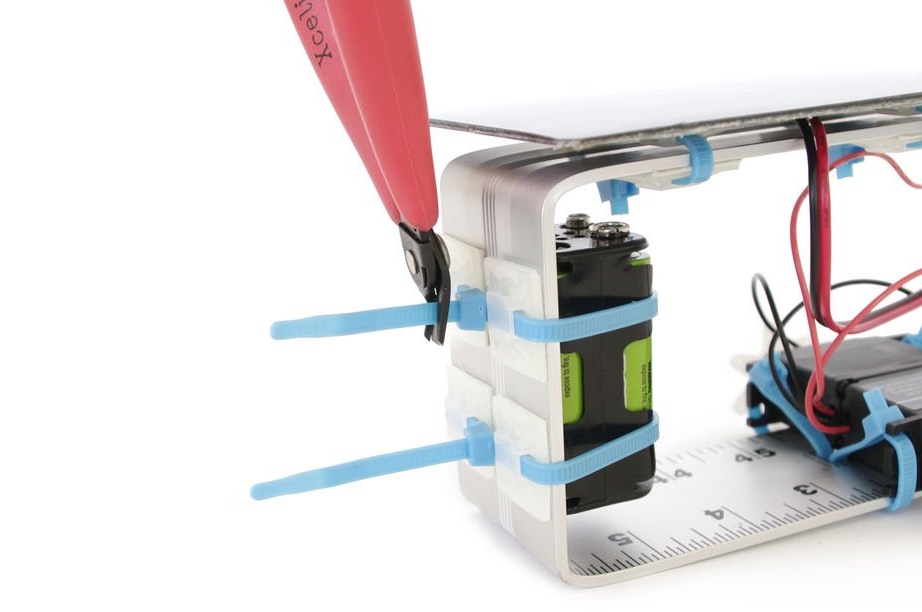
Asegure las baterías con abrazaderas dentro de la regla en forma de U para que se asienten firmemente e inmóviles en su lugar.
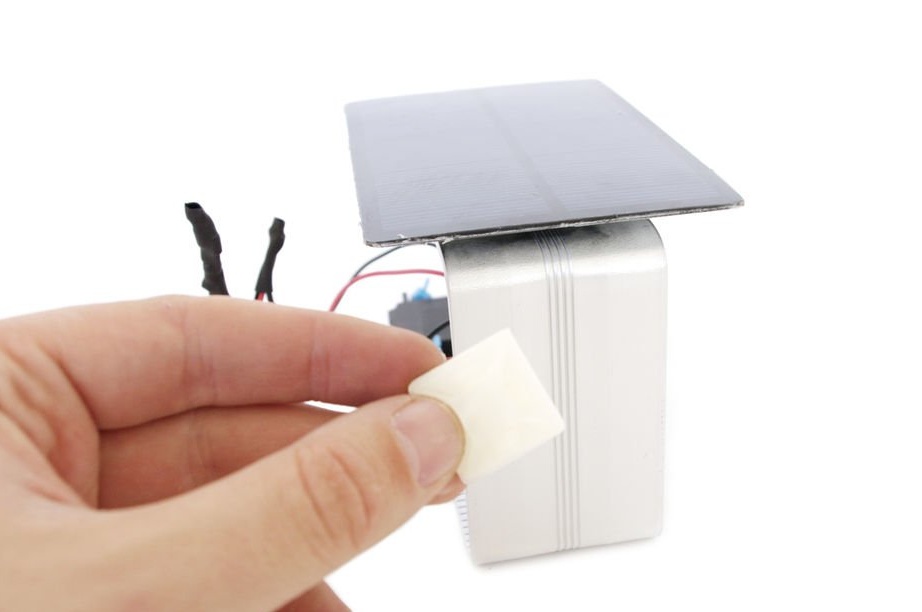
Paso 15: Recorte


Cortar los ganchos en los soportes de plástico de la pared.
Paso 16: ruedas
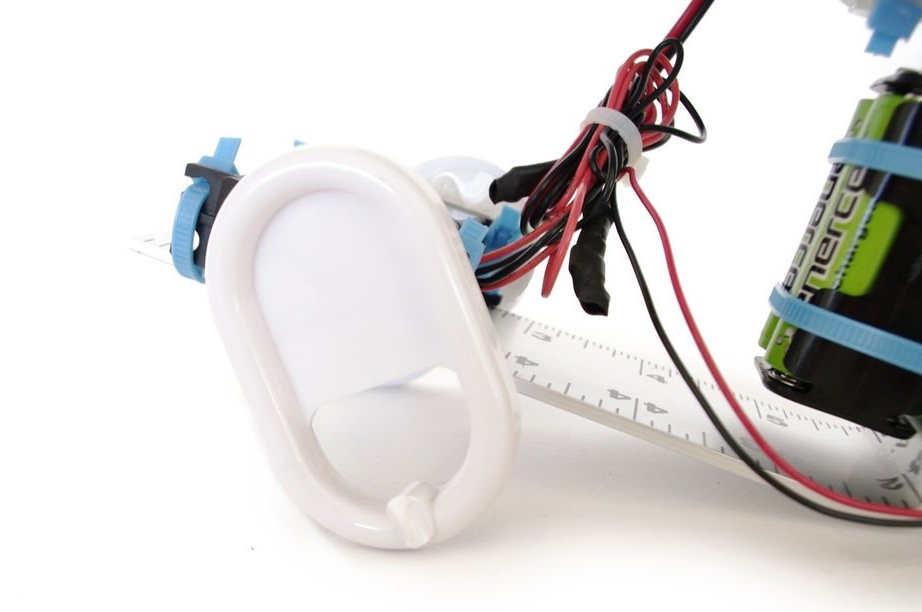
Pegue los soportes de pared a los engranajes exteriores de los servos (esto será algo así como ruedas).
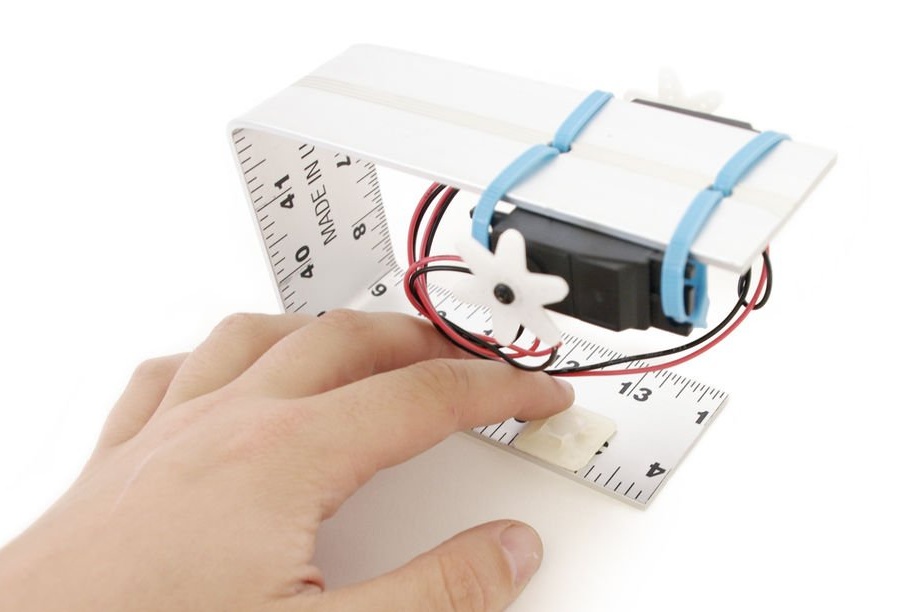
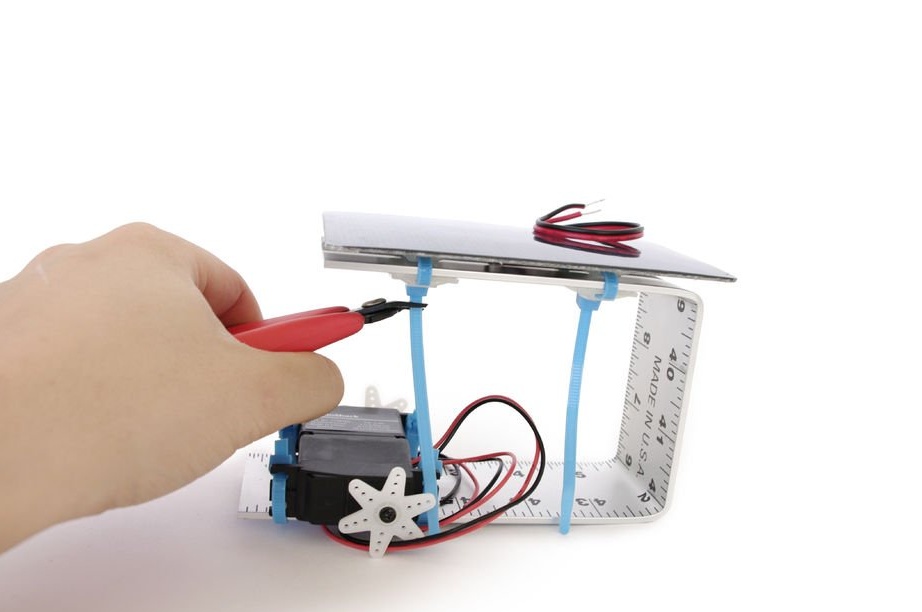
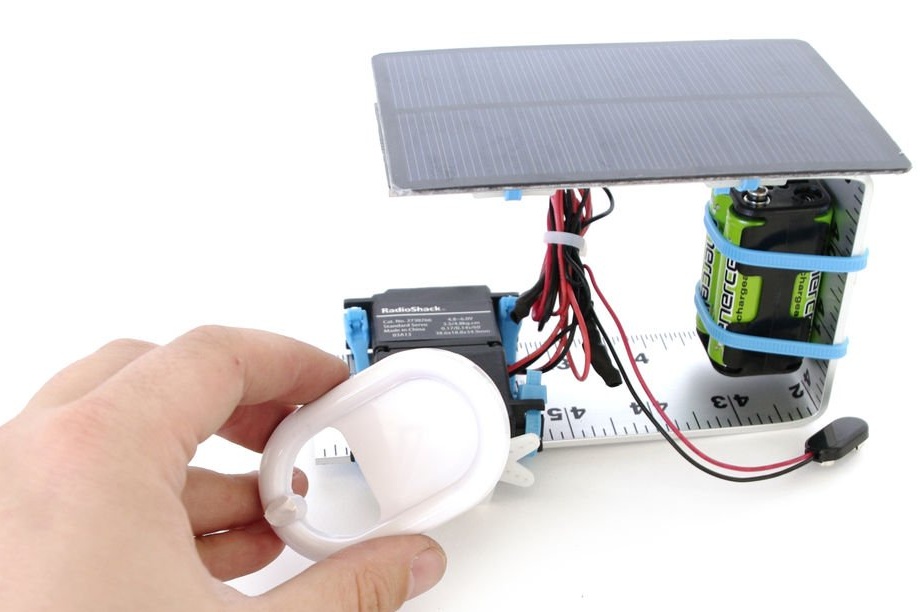
Paso 17: ¡Enciéndelo!

Conecte el cable a la batería y el robot comenzará a moverse.