


Casi todos los equipos modernos para controlar modelos de radio (como Futaba, Hitec, Multiplex, FlySky, etc.) tienen un conector TRAINER a bordo, con una salida PPM (principio de codificación analógica), que se utiliza para conectar un transmisor (panel de control) a la computadora en el modo de joystick habitual, para que pueda entrenar virtualmente en virtual modelo aviones, helicópteros, etc. sin arriesgarse a romper el modelo real. Para conectar el control remoto a la computadora, se utilizan cables adaptadores especiales comprados,
Tipo de tales

Pero nosotros los habitantes de nuestro sitio podemos hacer un análogo casero del adaptador, una de las mejores opciones de circuito es un cable USB en el microcontrolador atmega8, diseñado por Oleg Semenov, Vadim Kushnir, Vitaliy Puzrin. Este software hecho a sí mismo puede funcionar con cualquier cantidad de pulsos de canal desde el control remoto (transmisor) y no depende de su polaridad, no todos los adaptadores comprados pueden hacerlo.
Paso 1. Lo que necesitamos.
•
• BC 547 (o KT315, KT3102)
• Dos diodos zener para 3.3-3.6v. (por ejemplo, 1N5226, 1N5527, KC133)
• Resistencias 68 Ohm-2 pcs., 2.2k., 4.7k., 10k., 200k., Condensador 0.22
• Cerámica o cristal de cuarzo a 12 MHz.
• Cable de extensión USB de 1 m. o más (para piezas), cable de S-video (para piezas)
• Accesorios para soldar, placa PCB.
Paso 2. Hacer un enchufe para el conector "ENTRENADOR".
El enchufe para el cable de S-video es ideal para el conector TRAINER.
Solo debe primero ser soldado correctamente.
En la foto: Este es el cableado estándar del cable de S-video.
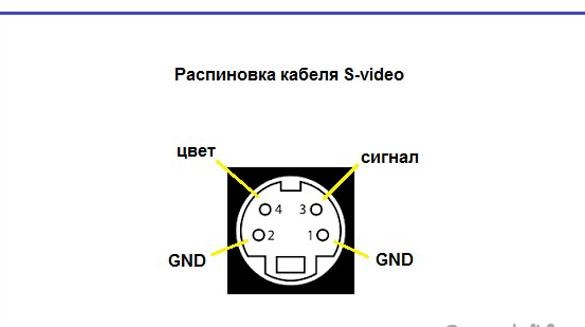
En la foto: Y tenemos que rehacerlo de acuerdo con el siguiente esquema a continuación.

Esta opción es adecuada para los controles remotos FlySky, para otros fabricantes de controles remotos, el pinout puede ser diferente, por lo que primero debe buscar y verificar en Internet.
Para trabajar con el simulador, solo se usará 1 pin: señal PPM y GND.
Tomamos el cable de s-video y cortamos el enchufe que necesitamos.

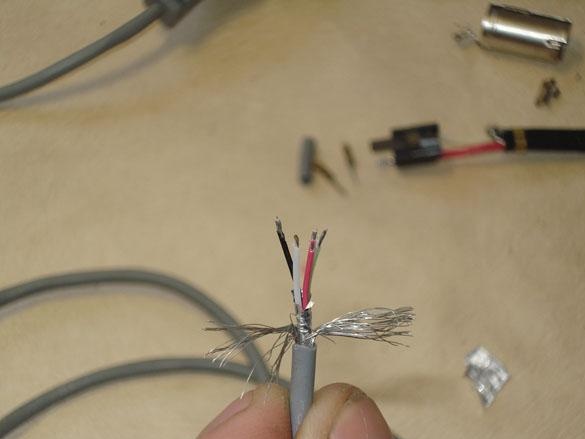
Retiramos la carcasa de plástico (caja), si no es extraíble, haga un corte con un cuchillo y retírela.
En el interior, está claro que los dos cables de entrada están soldados a los pines incorrectos para nuestro circuito, y los otros dos pines están conectados al cuerpo, lo que tampoco nos conviene. Por lo tanto, sacamos todos los interiores.



Sacamos las patas GND y las desconectamos.


Tomamos el cable de extensión USB preparado, cortamos el conector Tipo A con un trozo de cable de 20 cm y lo dejamos a un lado para una mayor conexión a la placa.

Tomamos el resto del cable, de al menos 80 cm de largo., Cortamos los extremos para conectarlo al enchufe.
Ponga inmediatamente la funda en el cable.

Los cables pelados se ennoblecen con una pieza de termocontracción.

Servimos los extremos de los cables.

Suelde las patas del conector e insértelos en su lugar de acuerdo con el diagrama de conexión del control remoto.

Ensamblamos el conector, fijamos todo al adhesivo termofusible y colocamos la carcasa de la carcasa en su lugar.






Para reparar el estuche cortado, colocamos varios tubos termocontraíbles y lo engarzamos con calentamiento.





Verificamos la operabilidad del cable recibido por el probador, si el circuito suena, no hay cortocircuito, entonces el cable está listo.

Ahora debe insertar el enchufe con el cable en el conector TRAINER, encender el control remoto (transmisor) y medir la presencia de voltaje en la salida del cable de señal PPM, debe ser de aproximadamente 3 voltios, si no es así, debe verificar el voltaje directamente en la salida de la consola y configurar la salida en el menú.



Paso 3. Fabricación de la placa adaptadora.
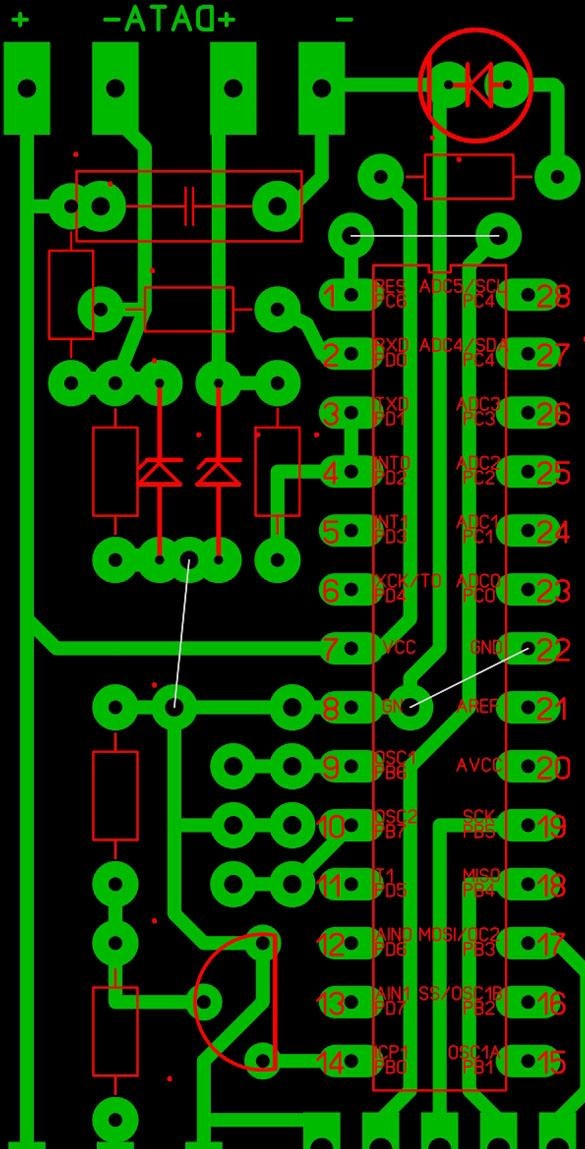
El circuito principal del adaptador.
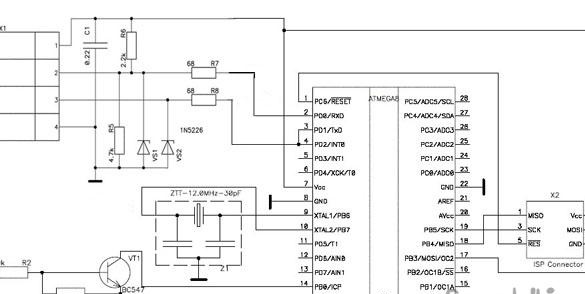
De acuerdo con este concepto, diseñamos una placa de circuito.
Obtuve una placa tan pequeña que se hizo en el programa Sprint-Layout.
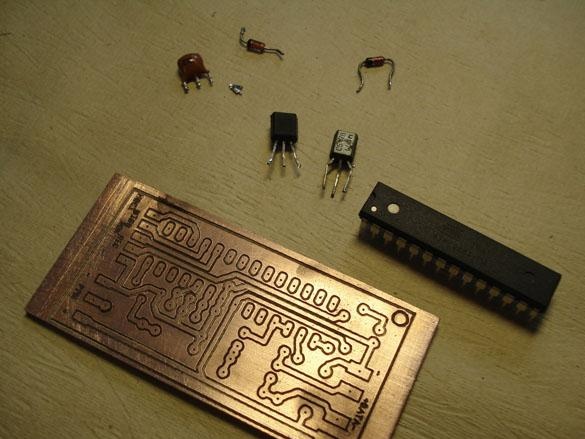
Ponemos a su disposición la placa en una de las formas disponibles para usted, LUT, CNC, etc.
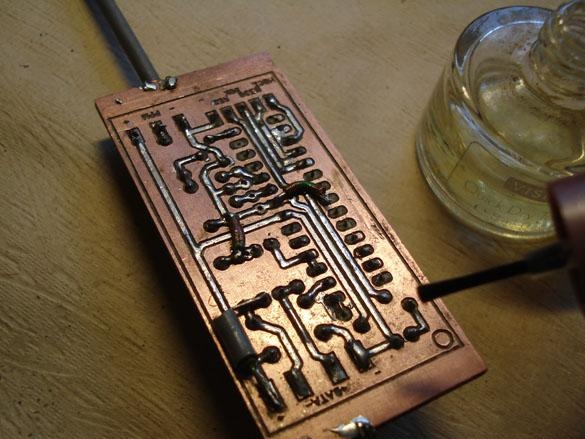
Me divierto en el CNC.


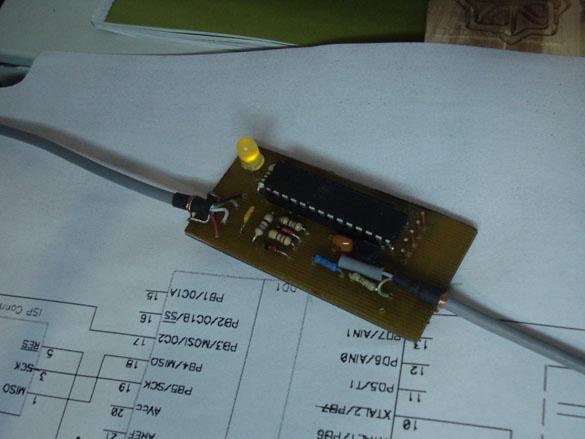
El resultado fue una bufanda.
Paso 4. Cableado del tablero.
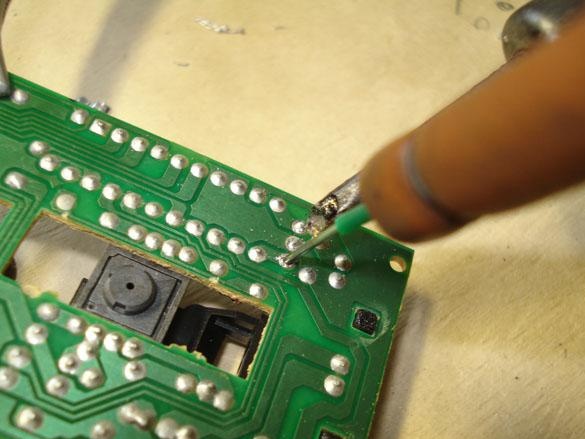
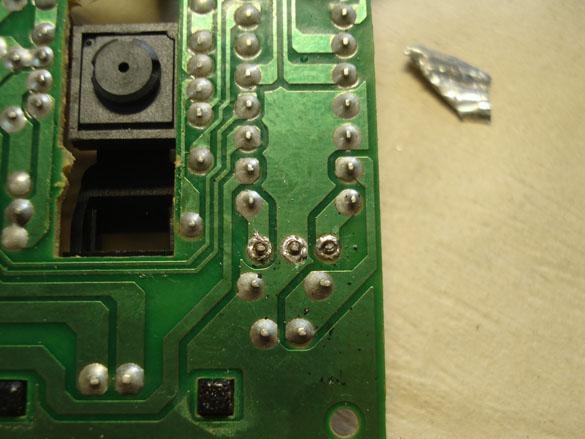
No se apresure a comprar cuarzo de inmediato a 12 MHz, cada casa tiene un mouse de computadora usb innecesario, una unidad flash vieja u otros dispositivos USB innecesarios, revíselos adentro, para asegurarse de que haya lo que necesita.

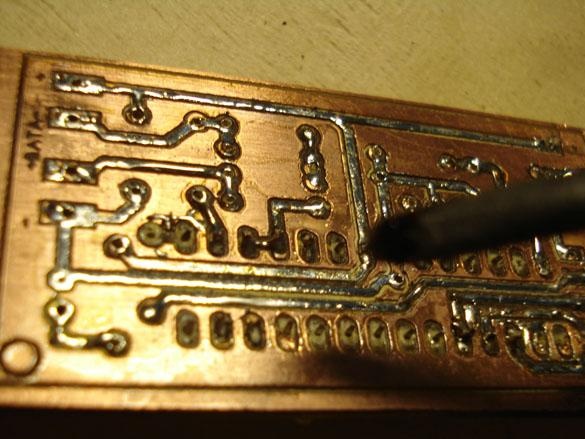
La succión falló, así que utilicé el viejo método del abuelo, la aguja del Spitz.

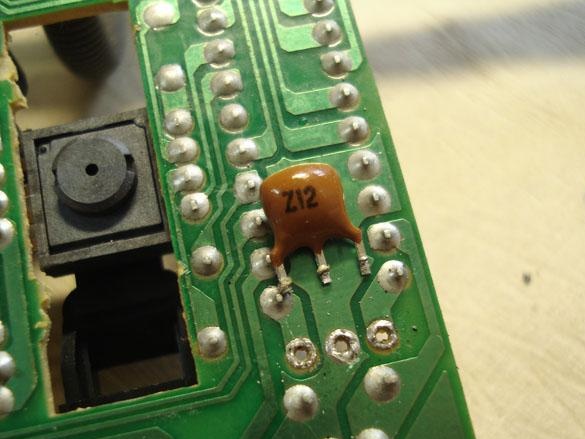
Soldamos todos los detalles en la placa, soldamos nuestro cable fabricado con un conector de s-video y 20 cm de cable USB previamente preparado.
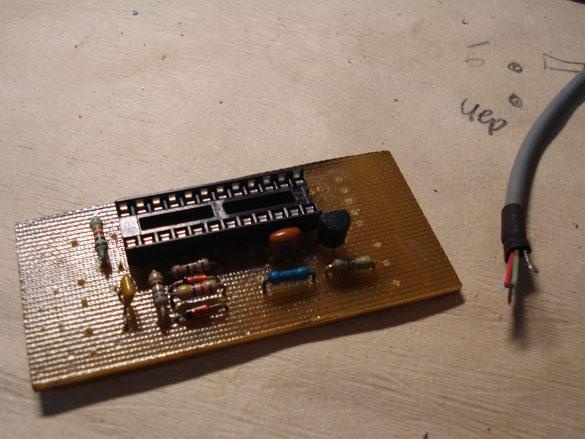
Cubrimos el tablero terminado con barniz.
Paso 5. Microcontrolador de firmware.
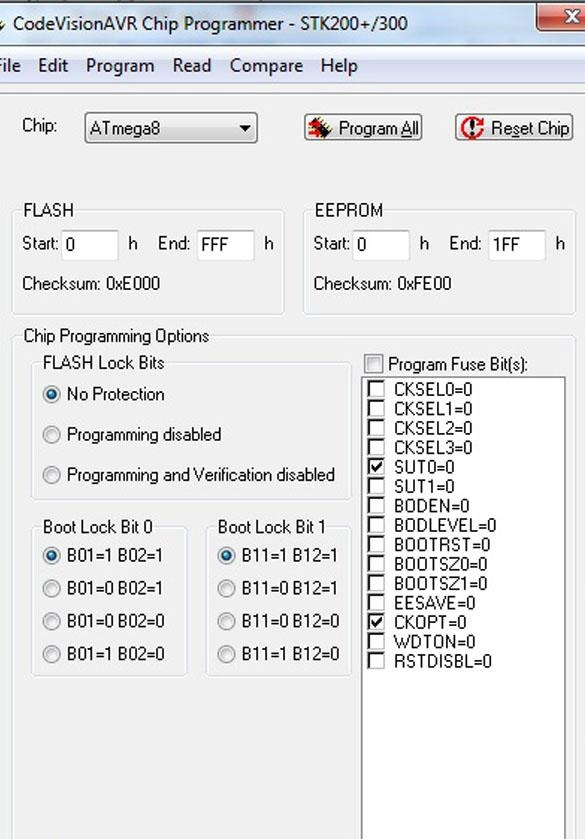
Para el firmware a través del programa CodeVisionAVR, exponemos los fusibles como en la foto a continuación, para PonyProg, viceversa, respectivamente.
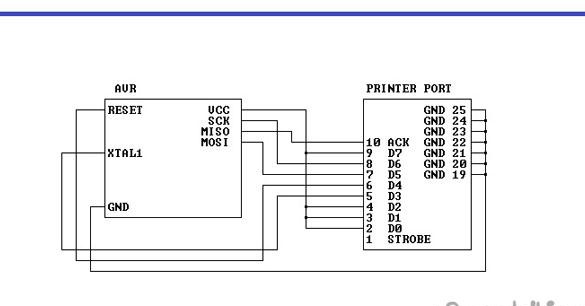
Destellamos MK a través del programador o simplemente a través del puerto LPT de acuerdo con el siguiente esquema.
Proceso de firmware.
Paso 6. Verificación del dispositivo terminado.
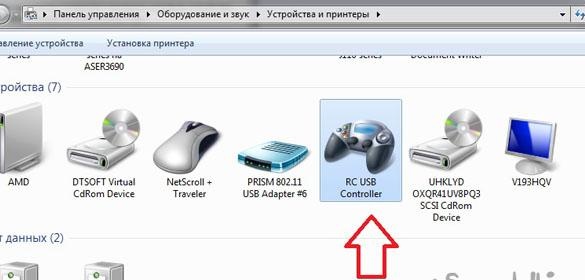
Conectamos el dispositivo terminado al puerto USB de la computadora, debe definirse como un dispositivo de juego (joystick), si tiene una conexión a Internet, probablemente sucederá antes de la instalación del controlador del dispositivo.

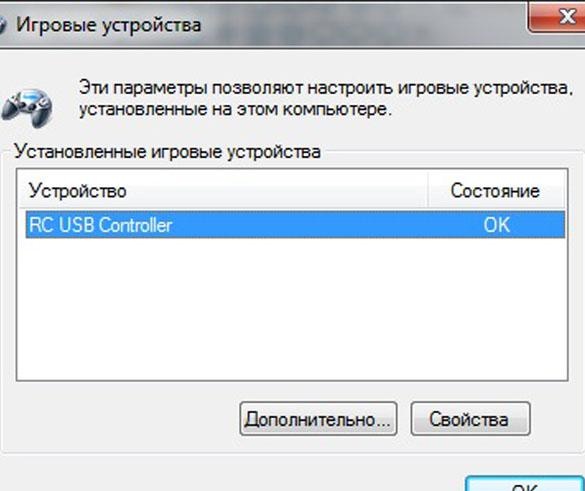
Después de que aparezca la notificación de que el dispositivo está listo para usar, puede ir a INICIAR DISPOSITIVOS E IMPRESORAS, allí veremos la imagen del joystick.
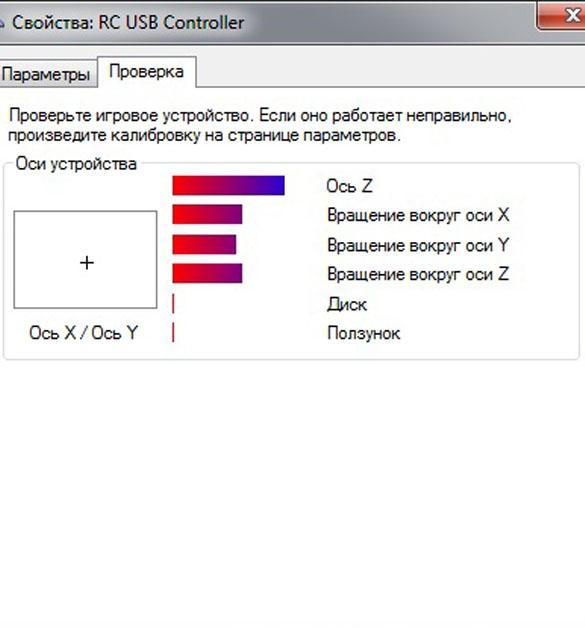
Entramos en las propiedades y verificamos el funcionamiento de los ejes, si todo funciona, queda por ejecutar uno de los muchos programas de simulador, configurar, asignar los ejes y ¡puedes volar!
Si la computadora no detecta el adaptador, debe verificar el diagrama de cableado.
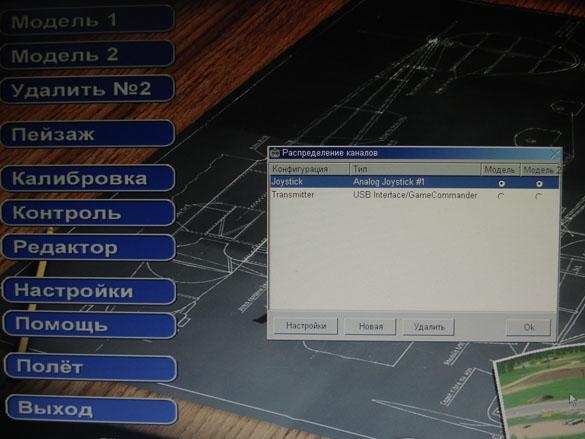
Ejemplo de simulador AeroFly Professional Deluxe
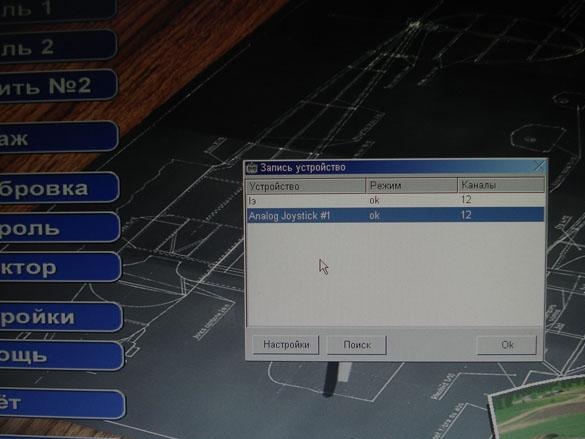
Seleccionamos nuestro joystick.
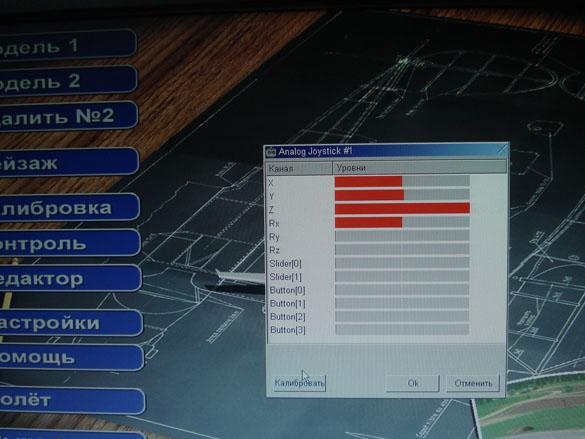
Calibramos el eje.
Ajuste el eje a los canales deseados.
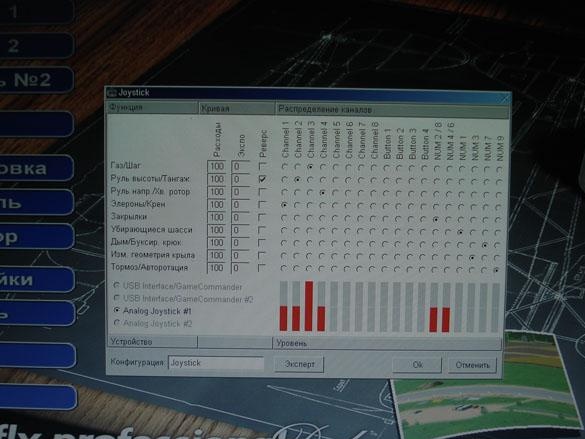
Hurra, voló!



Firmware, esquema, etc.