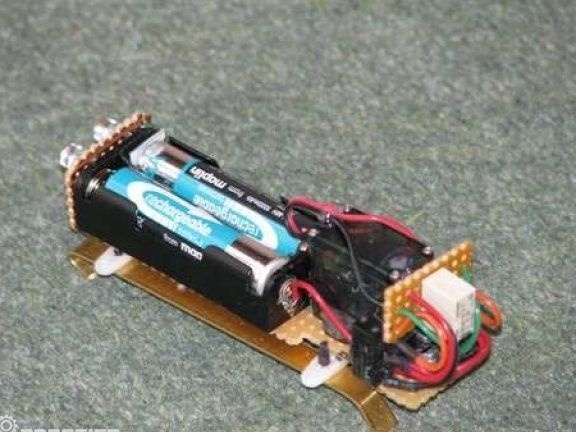
Carpet Crawler es un pequeño robot que pertenece a la clase BEAM. Tal robots incluir de inmediato dos elementos como la estética, la biología, electrónica y mecánica. Gracias a este enfoque, tales robots imitan a las criaturas vivas tanto como sea posible, a veces parece que son capaces de pensar.
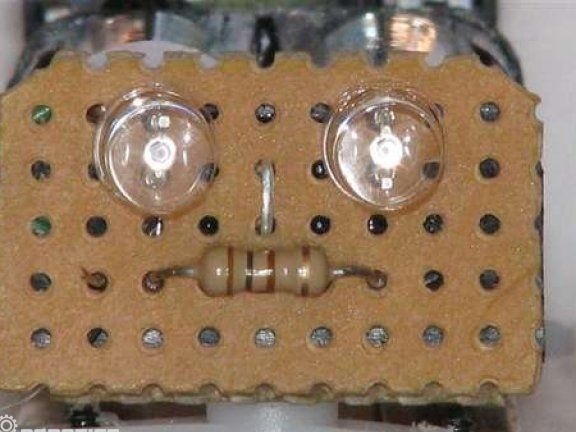
Como cerebro para tales robots, se utilizan relés, sensores e interruptores, y se mueve hecho en casa debido al servomotor. Las baterías AAA se utilizan como energía. Como los ojos que arden brillantemente, se instalan dos LED.
Materiales y herramientas para la fabricación:
- tira de latón que mide 1/32 "x 1/4" x 8 ",
- dos piezas de tiras de cobre;
- M2 nueces y bots;
- servomotor (Micro RC (7,5 g));
- dos microinterruptores (se pueden obtener de unidades antiguas);
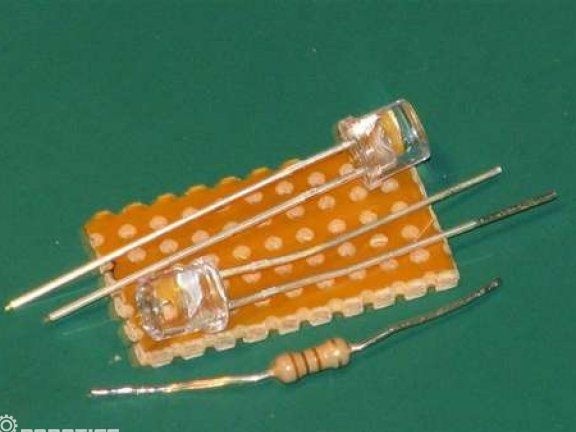
- dos LED (es mejor usar rojo, porque el blanco o el azul en este caso pueden funcionar);
- una resistencia 100R (si los LED son amarillos o verdes, entonces 47R);
- dos pilas AAA y un soporte para ellas;
- cableado delgado.




Proceso de fabricación:
Primer paso Alteración del servomotor.
El servomotor está diseñado de tal manera que durante la operación realiza movimientos impulsivos. En este caso, debe rehacerse para que funcione en rotación. Hay dos formas de hacer esto.
En el primer caso, puede guardar la velocidad y la dirección desde el control del motor, así como la electrónica de control. El dispositivo aún necesitará pulsos entrantes para funcionar.
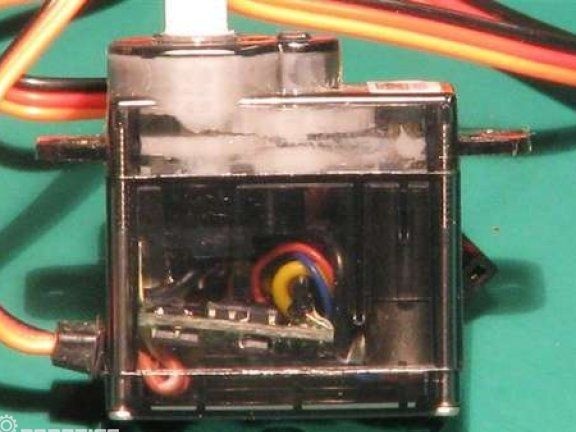
El autor fue por el otro lado. Es necesario cortar el elemento de tope de los engranajes. Luego, los engranajes deben alinearse, será difícil ensamblarlos de nuevo si se pierde la secuencia. Al desmontar, la superficie del servomotor debe engrasarse con grasa de silicona.
La imagen muestra el mecanismo de control RSV que necesita ser movido.

Después de quitar la placa, el cable rojo debe cambiarse exactamente a ese cable rojo del motor. Los cables deben envolverse cuidadosamente con cinta aislante para evitar cortocircuitos.

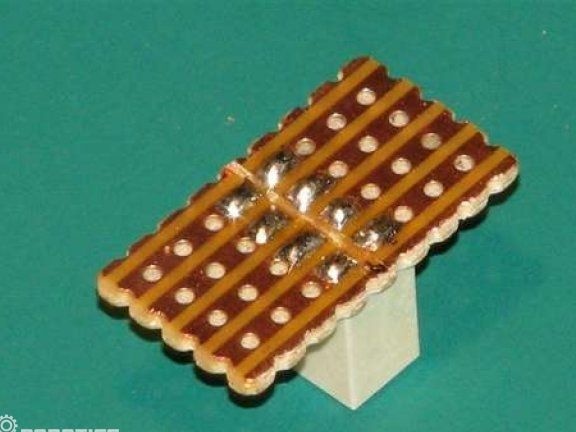
Paso dos Crea la parte mecánica
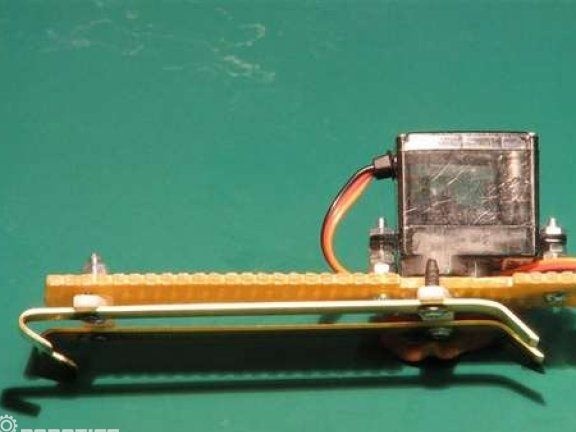
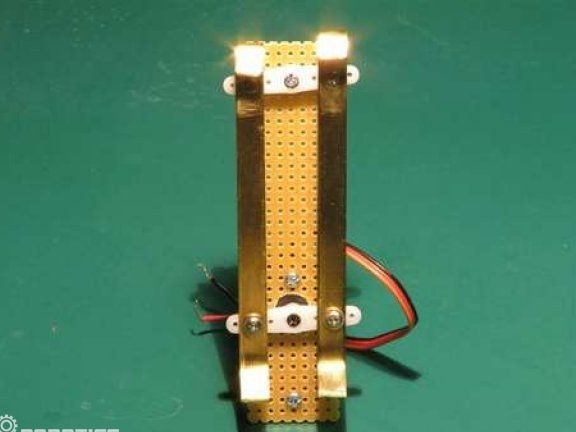
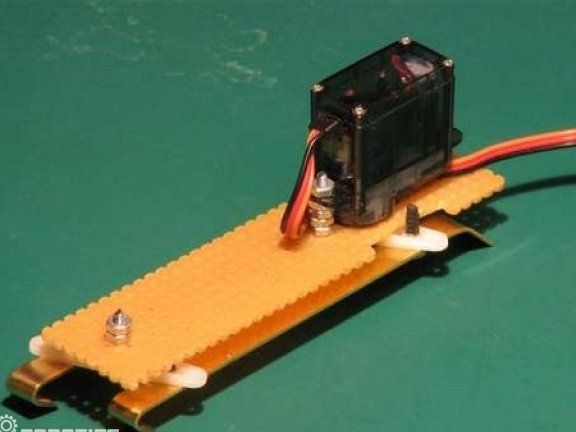
En el tablero de trabajo, debe perforar varios agujeros y luego instalar el relé en la parte posterior de la batería.Para montar el servoaccionamiento, se utilizan pernos de 2 mm.
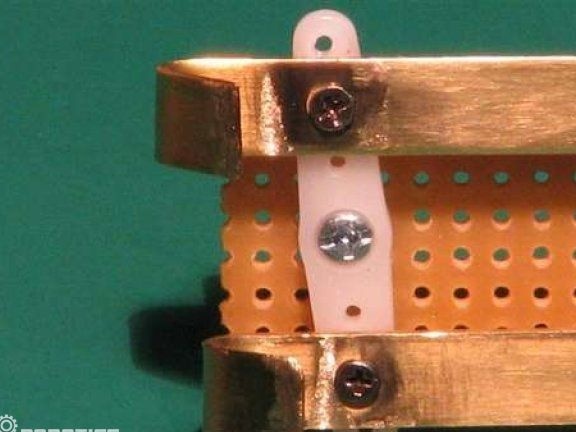
Las patas del robot están hechas de placas de cobre sólidas, para esto primero se cortan en trozos de una longitud determinada y se doblan. Gracias a tales desviaciones, el robot se aferrará a la carretera y se arrastrará. Sujete la placa con tornillos pequeños.


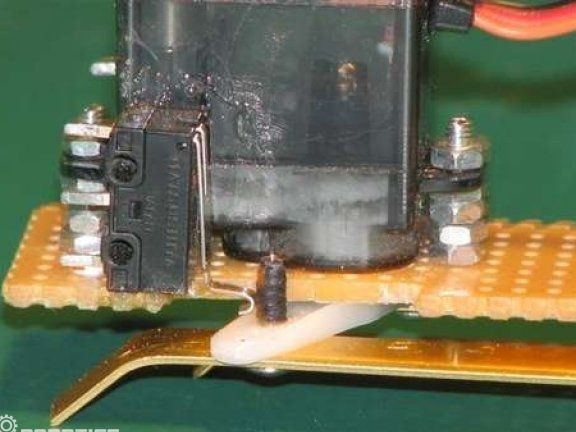
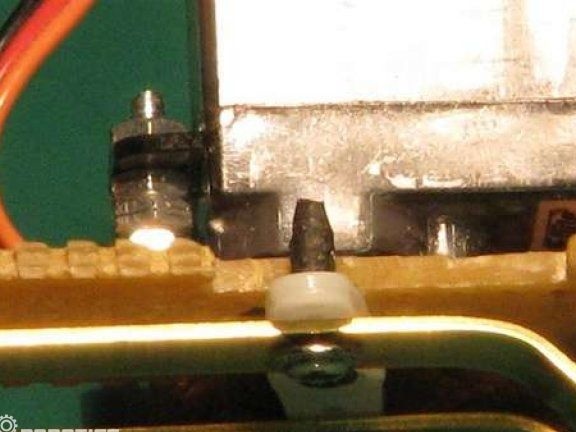
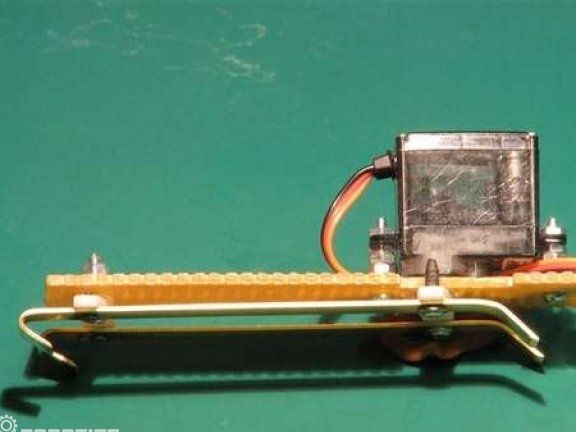
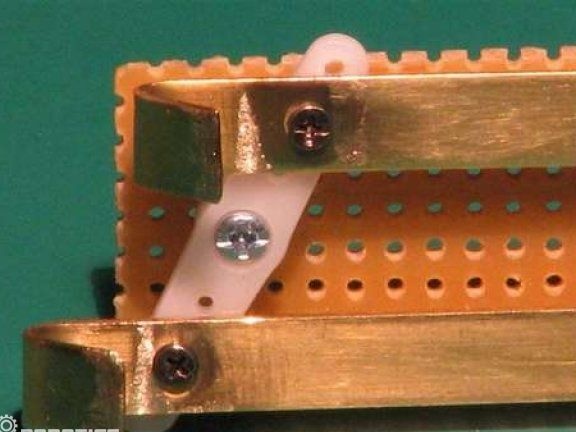
Para controlar las patas necesita configurar los interruptores. Están unidos al servomotor con pegamento.
Paso tres Circuito electrónico robot
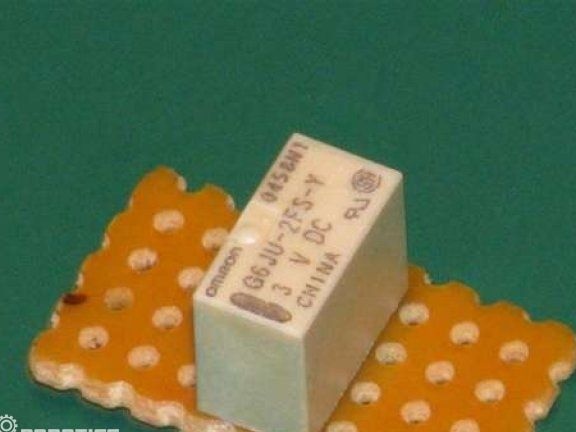
El componente principal en el trabajo de fabricación casera se puede considerar un enganche de relé, que funcionará cuando se desconecte de la bobina. El relé cambiará de movimiento, pero permanecerá en un lugar hasta el próximo turno.
Los pulsos a las bobinas vendrán de dos microinterruptores, se encenderán cuando el relé de la antena caiga en el interruptor.

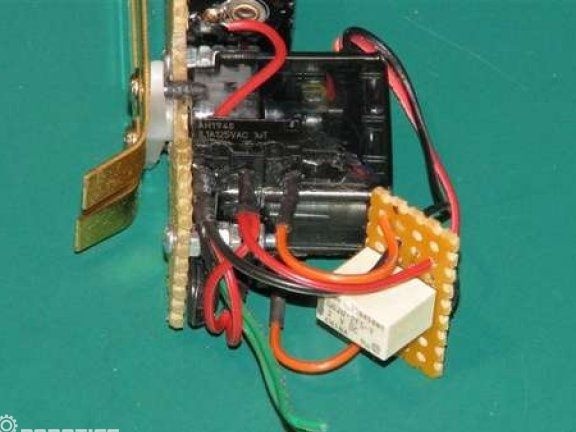
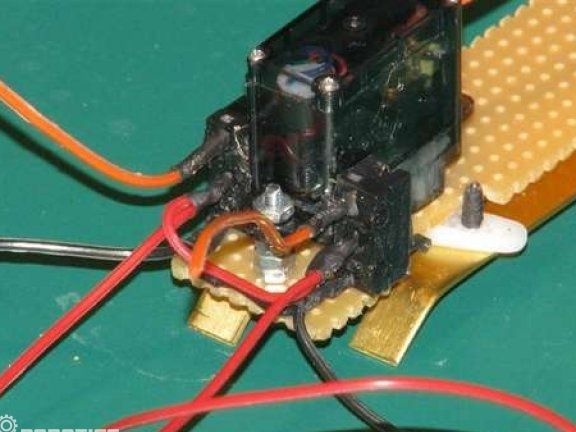
Paso cuatro Montaje de la parte electrónica.
El relé está montado en una chatarra en una placa, por lo que es más fácil de conectar. Todo el proceso de conexión de la electrónica se muestra en la foto.





Eso es todo, ahora el robot está listo. Lo mejor de todo es que se verá en la superficie de la alfombra, ya que está diseñado específicamente para tales lugares. Primero, el robot debe encender los LED, y luego se arrastrará lentamente por el suelo.