

Este proyecto es ideal para aquellos que a menudo olvidan alimentar a sus peces. O simplemente no siempre puede hacerlo a tiempo. Después de haber hecho un comedero de este tipo, no puede preocuparse por sus pequeñas mascotas, e incluso puede irse por un tiempo.
Materiales:
- Arduino UNO u otro microordenador compatible.
- Adaptador de corriente 9V o 12V.
- Un motor paso a paso de 5V de una vieja unidad de disquete.
- Partición lisa (utilizada desde la caja de herramientas).
- Interruptor de palanca desde un teléfono fijo.
- El estuche del disco duro (sirve como contenedor para la alimentación).
- Placa lisa (por ejemplo, regla de plástico).
- Trípode de una cámara CCTV.
- Resistencia 10 kOhm.
- Temporizador mecánico de corriente alterna.
Primer paso Asamblea de caja:
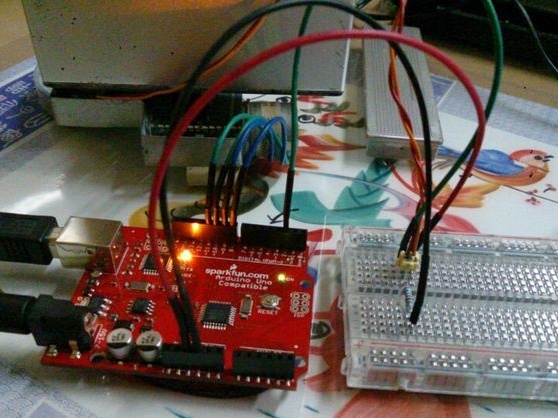
El diseño del ensamblaje se muestra en la primera figura. Se corta un orificio en un lado de la carcasa del disco duro. Para esta parte del alimentador, incluso puede usar una botella de plástico, sin embargo, deberá encontrar un soporte para mantenerlo boca abajo.
El autor utiliza un trípode de una cámara CCTV, ya que tiene una altura ideal para instalar un motor paso a paso debajo de él. Todo lo que quedaba era perforar un agujero en la carcasa.
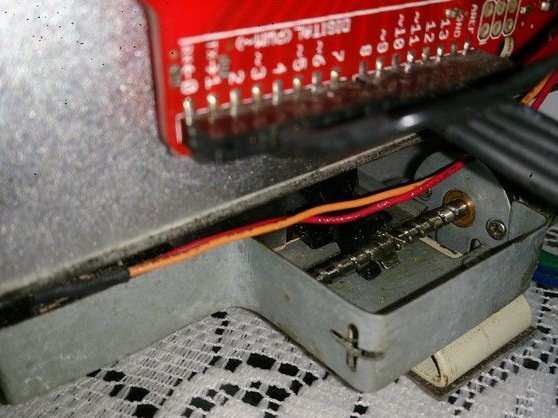
Para mover la cubierta, se utilizó un motor paso a paso de 5V con un mecanismo de accionamiento para mover las lentes de accionamiento. Se colocó una partición lisa de la caja en la parte superior del soporte de la lente, debajo del orificio donde deberían salir los gránulos de alimentación. Para esto, también se recomienda usar una regla rota. Deje un milímetro desde el fondo del casco para que los gránulos de alimentación puedan pasar a través de la tapa cerrada.
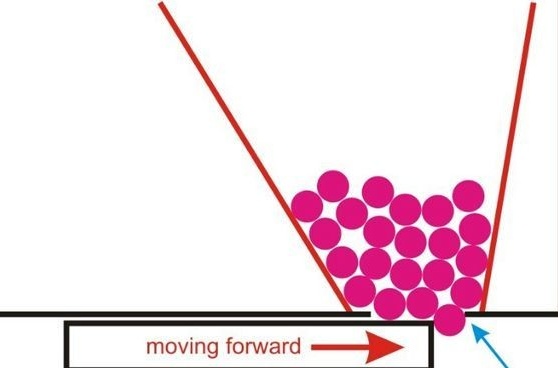


Paso dos Modificación del cuerpo:
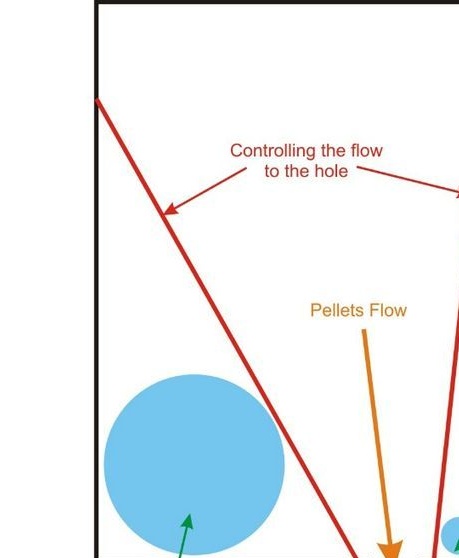
El siguiente diagrama muestra cómo la alimentación debe pasar a través del orificio correctamente para que los gránulos no permanezcan en los ángulos de salida de la alimentación.
Después de dos días de uso, el autor se dio cuenta de que parte de la alimentación estaba atascada, pero no salió como se esperaba. Es por eso que necesitábamos una regla o cualquier placa lisa que encaje en el contenedor y tenga la forma de la letra V.

Paso tres Electrónica parte del alimentador:
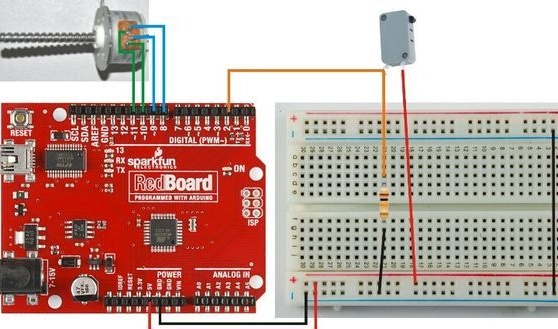
Se instalan un motor paso a paso, una resistencia de 10 kΩ y un interruptor como se muestra en el siguiente diagrama. Para facilitar la comprensión del funcionamiento del circuito y las pruebas, se utiliza una placa de prueba, en el ensamblaje final falta (un ejemplo en la última foto).
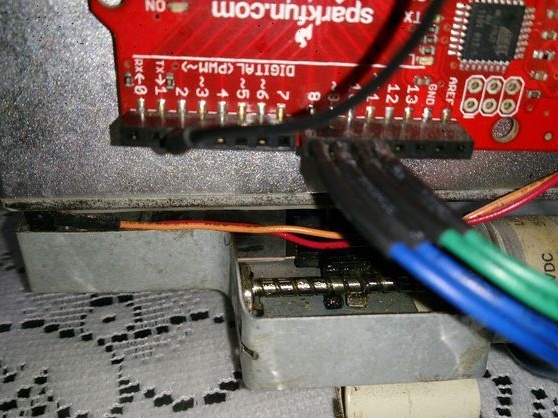
Cuatro cables del motor se conectan a los pines digitales 8-11. Un pie del interruptor a la salida de potencia de 5V. El segundo tramo, a su vez, está conectado a tierra usando una resistencia de 10 kΩ, y también está conectado al pin digital 2.
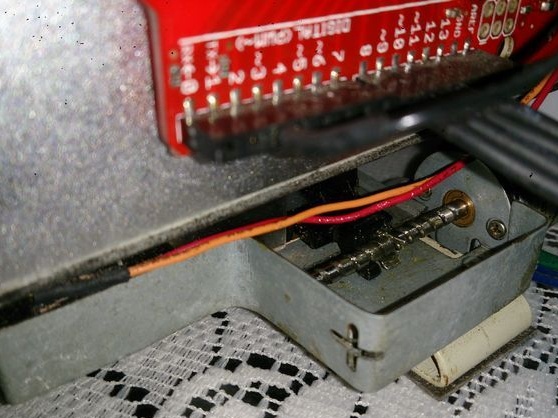
El interruptor se coloca frente a la cubierta móvil, y la parte metálica se dobla, formando así un tope (cable rojo y naranja en la tercera foto). Cuando el interruptor se mueve hacia adelante y presiona la parada, el Arduino registrará un valor ALTO y detendrá el motor.
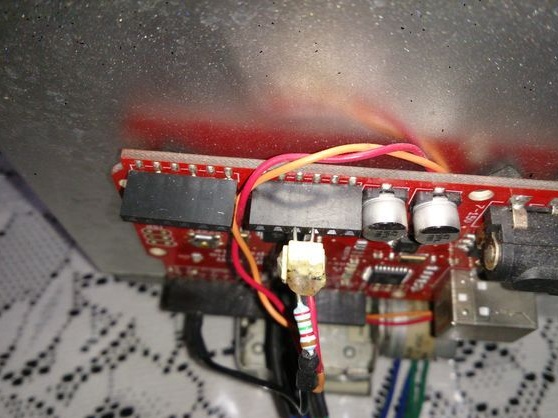
La placa está unida a la parte posterior de la caja con cinta aislante y el enchufe con un temporizador a su lado. Se utilizan para equilibrar la carcasa para que permanezca en la posición correcta.
Prueba de trabajo hecho en casa sin contenedor de comida:
El siguiente video muestra el funcionamiento de un dispositivo completamente ensamblado. Como puede ver, la primera salida de alimentación es correcta. En la segunda salida de la alimentación, se puede ver que si los gránulos están atascados y la tapa no se cierra correctamente, se moverá hacia adelante y hacia atrás hasta que se cierre correctamente.
Código de programa: