
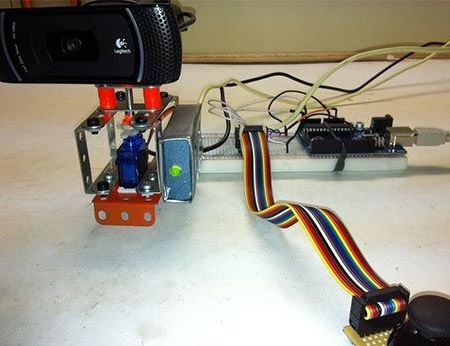
Este artículo hablará sobre cómo usar Arduino Puede controlar la cámara web. Más precisamente, el control será un servoaccionamiento, que se instala en el marco del diseñador en el que ya se conectará la cámara web.
Materiales utilizados por el autor para crear este dispositivo:
1) constructor de metal
2) soldadura en frío
3) webcam
4) servo
5) LEDs
6) Arduino
8) joystick de PS3
Considere con más detalle el diseño y los puntos principales de la creación de un dispositivo para controlar la cámara.
Desconcertado por la cuestión de cómo usar una plataforma Arduino tan conveniente además de las funciones estándar como las luces intermitentes. Una vez que tuvo una conversación por Skype con un colega en el trabajo, el autor tuvo una idea interesante. ¿Qué pasa si le das a sus colegas la oportunidad de controlar una cámara web y ver lo que sucede en la oficina? Tan pronto como lo dijo, el autor comenzó a trabajar en la implementación de esta idea.
Inicialmente, el autor estudió los principales materiales de los artículos donde se usaba un joystick para controlar las unidades creadas en la plataforma Arduino. Habiendo entendido el material de estos artículos, el autor se dio cuenta de que podía usar el viejo joystick de la PS3 para controlar los movimientos del servo desde él.
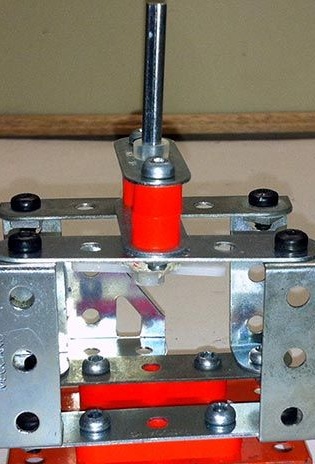
Comenzando a construir, el autor decidió construir un marco en el que se colocarán el servoaccionamiento y la cámara. Para no complicar la tarea, el autor decidió usar el constructor de metal habitual, que compró en una tienda de segunda mano.
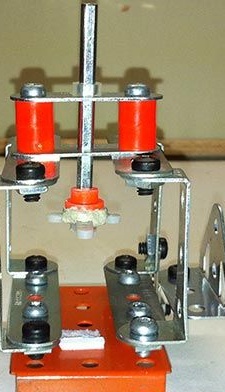
Tomando los detalles de este constructor, resultó crear tal marco del futuro dispositivo:
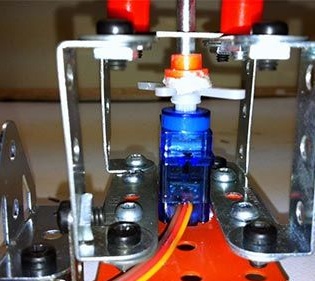
Se instaló un servoaccionamiento dentro del marco. Como se puede ver en la foto, encaja perfectamente en el marco creado. Para fijar el servo en el marco, el autor usó cinta de doble cara. Utilizando soldadura en frío, el eje del servo se conectó al engranaje, que controla el movimiento de la plataforma con la cámara.
Es importante asegurarse de que el diseño de la transmisión se realice incluso para que no haya una carga innecesaria.
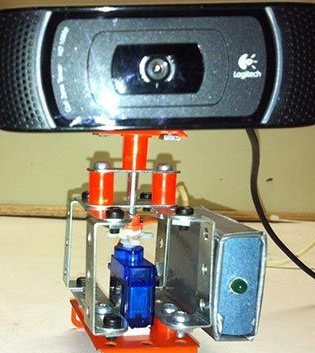
Entonces el autor comenzó a instalar la cámara web. Se utilizó una cámara Logitech, que se utiliza en la oficina de la empresa donde trabaja el autor. Por lo tanto, debido a que la cámara no pertenece al autor, no la desmontó ni quitó el contrapeso, aunque esto simplificaría el diseño del futuro dispositivo.

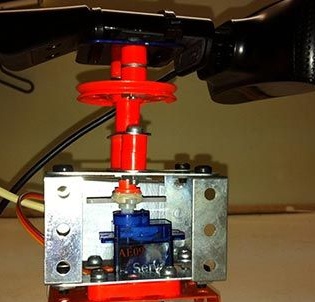
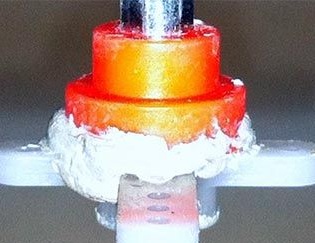
Para compensar de alguna manera el peso de la cámara y distribuirla en el centro de la estructura, el autor usó 2 juntas gruesas. Le permiten cambiar el peso de la cámara desde el servoeje al bastidor principal, y también evitan la presión del eje sobre la propia cámara.
La cámara está montada en una plataforma redonda especial, que se basa en un eje que proviene del servoaccionamiento. De esta forma, el control de la cámara se realiza mediante una transmisión cruzada.
Una vez que la parte mecánica de la estructura estuvo lista, el autor la retomó. e relleno
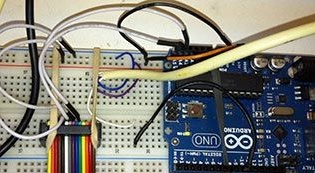
Para empezar, decidió conectar servos y LED que mostrarán el estado del sistema.
El servo en sí tiene 3 cables: -GND, + 5V y señal. El autor usó 9 pines para darse cuenta de la capacidad de controlar la unidad. Para hacer un indicador de activación de la unidad, el autor instaló un diodo que está conectado a dos cables: + 5V y GND con una resistencia en la línea + 5V.

Luego, basándose en artículos en Internet, el autor preparó un joystick roto de la PS3 para controlar la unidad.

Luego, el autor eligió un programa para Arduino, gracias al cual es posible usar el joystick y el puerto USB para controlar el servo. Para comunicarse con un puerto USB, el autor utilizó el control de módem y un emulador de terminal de aplicación como Minicom o Putty.
Este programa proporciona varias funciones para controlar la cámara.
Para instalar la cámara en el centro 90 grados, debe presionar "m", la cámara también se colocará automáticamente en esta posición cuando se encienda el servo. Para girar la cámara hacia la izquierda, presione la tecla “F” y, al presionar el botón “J”, la cámara se gira hacia la derecha.
Puede descargar el programa al final del artículo.
Dado que el autor no resolvió particularmente el diseño del dispositivo de rotación de la cámara, comenzó a tener algunas desventajas.
Por ejemplo: como la cámara no está fija en el marco, cuando está inclinada, puede caerse de la plataforma; Como el servo es bastante pequeño, el par de la cámara crea una rotación adicional, que a su vez deforma el servo; Los orificios para el eje del servo son demasiado grandes, por lo que no es estático y también está sujeto a tensiones.
Por lo tanto, en el futuro, el autor desea actualizar ligeramente el dispositivo de la siguiente manera: asegúrese de que la rotación de la cámara esté controlada por las flechas del joystick y no por los botones; aligerar la carga en el servo al girar.