

El autor basó este proyecto en una versión más simple. hecho en casa barcos, y lo perfeccionó. Se colocan sensores en el bote para evitar obstáculos y moverse hacia la luz. Cómo se usa el controlador en el bote Arduino, se instala un sensor ultrasónico en la parte delantera y los sensores de luz se encuentran a los lados. Este simple barco no choca contra las paredes, y es controlado por una linterna.
Materiales y herramientas:
- Cinta aislante / cinta adhesiva
- Termoglue con pegamento caliente
- Motores de corriente continua 2 piezas
- Botellas de plástico 2 piezas
- cables
- Pequeñas hélices 2 piezas
- Arduino, computadora y cable USB
- caja de plástico
- Batería de 9V y conector
- Diodos de potencia (tipo 1N4004)
- Resistencias
- Transistor MOSFET o TIP 120
- Dos fotocélulas y dos botones.
- tijeras
- Soldar con un soldador

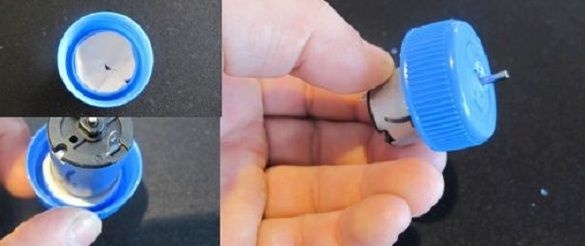
Paso 1. Instalación de motores.
Se quitan las tapas de las botellas y se hace un agujero en cada una de ellas. Dentro de la cubierta, el autor aprieta pegamento caliente sin cerrar los agujeros. Colocó el eje del motor en el orificio y lo puso sobre el pegamento. Después de que el pegamento se seque, el eje gira libremente. El mismo procedimiento ocurre con la segunda cubierta.
Paso 2. Colocando las botellas.
Las botellas se unieron por el principio de una balsa con la ayuda de tres tiras de cinta adhesiva.

Paso 3. Soldar a los motores.
Como los motores montados en los enchufes no tenían cables, era necesario soldarlos, la longitud de los cables era de unos 25-30 cm.

Paso 4. El corte en las botellas.
Para que los cables caigan en el casco del bote, se hace una pequeña ranura desde su lado superior.

Paso 5. Asegurar los motores.
Además, el autor tuerce las tapas de las botellas, ya que no giraban bien; tuve que usar pegamento caliente. Los cables se empujan a través de los agujeros preparados en las botellas.

Paso 6. Caso.
Una caja de plástico se pega a dos botellas. En esta capacidad para la electrónica, puede hacer agujeros para los cables, o sostener los cables a través de la parte posterior de la caja. Los orificios para los cables en las botellas están aislados con adhesivo termofusible.

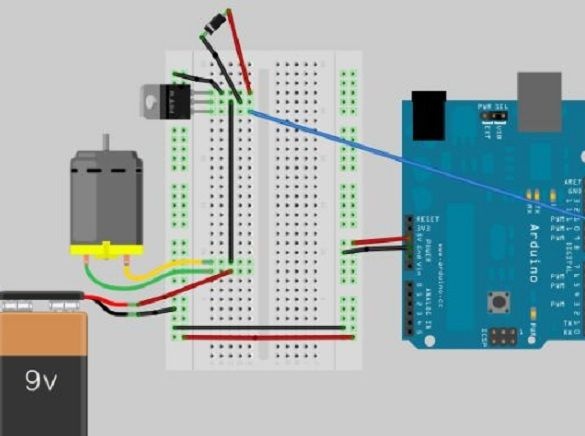
Paso 7. Diagrama de cableado.
El circuito usa un transistor TIP 120 como interruptor (puede usar transistores MOSFET o Darlington similares). Se utiliza para cambiar la carga cuando se consume una gran cantidad de corriente, ya que el Arduino no tiene suficiente potencia para los motores. Este circuito se ensambla para el primero y luego para el segundo motor (no se necesita otra batería para el segundo motor).
Paso 8. Sensores.
El sensor ultrasónico es ideal para la parte delantera de la embarcación, advierte de obstáculos en el camino. Las fotocélulas actúan como antenas y se utilizan para hacer que el bote flote hacia la luz.Los botones a los lados se usan como sensores de obstáculos. También puede modificar el código y usar otros sensores, como infrarrojos.

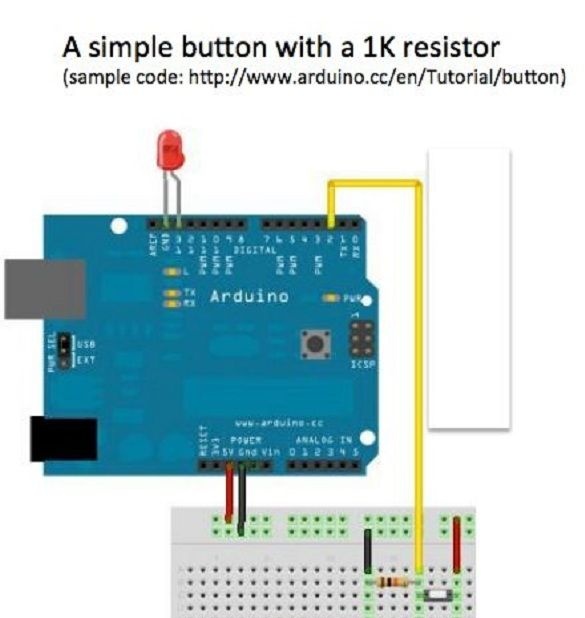
Paso 9. Esquemas para sensores.
El diagrama muestra la conexión de un botón simple y una resistencia de 1K. Se repite el esquema para ambos botones, los botones se colocan a ambos lados del bote. Serán responsables del cambio en el movimiento del barco en una colisión.
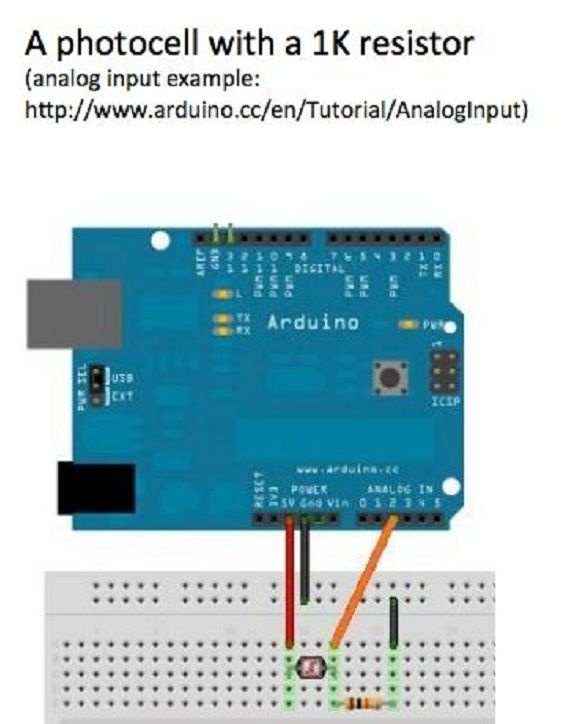
La siguiente figura muestra un circuito con una resistencia de 1K y una fotocélula. El autor lo realizó 2 veces y colocó las fotocélulas en lados opuestos del bote.
Paso 10. Código del programa.
El autor brindó la oportunidad de descargar su código para su uso, brindando así una funcionalidad básica para quienes ensamblarán dicho barco. El código incluye soporte para fotocélulas, telémetro y botones. El bote intentará evitar los obstáculos delante de sí mismo y gira en la dirección opuesta cuando encuentra obstáculos desde el costado. Si no desea utilizar el conjunto completo de sensores, pero solo algunos de ellos tienen un código para cada uno por separado. Puede descargar todos los códigos del artículo.
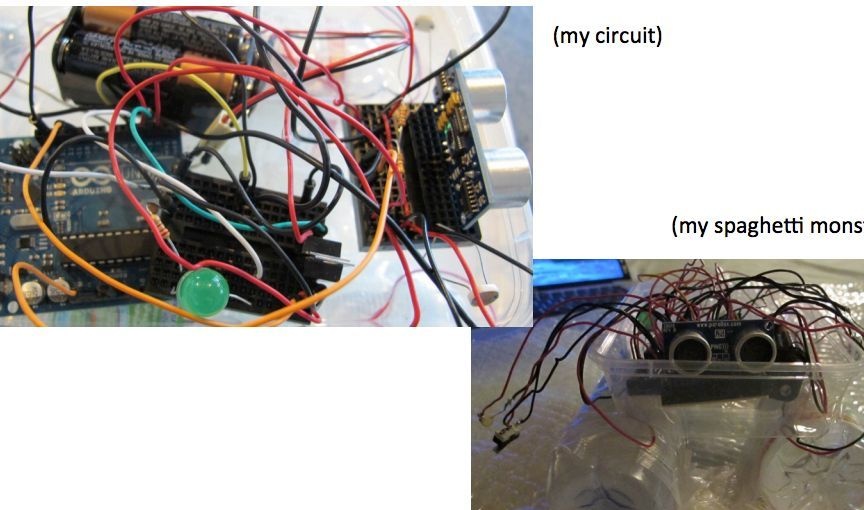
Paso 11. Montaje del bote.
Circuito ensamblado, Arduino y baterías están en caja.
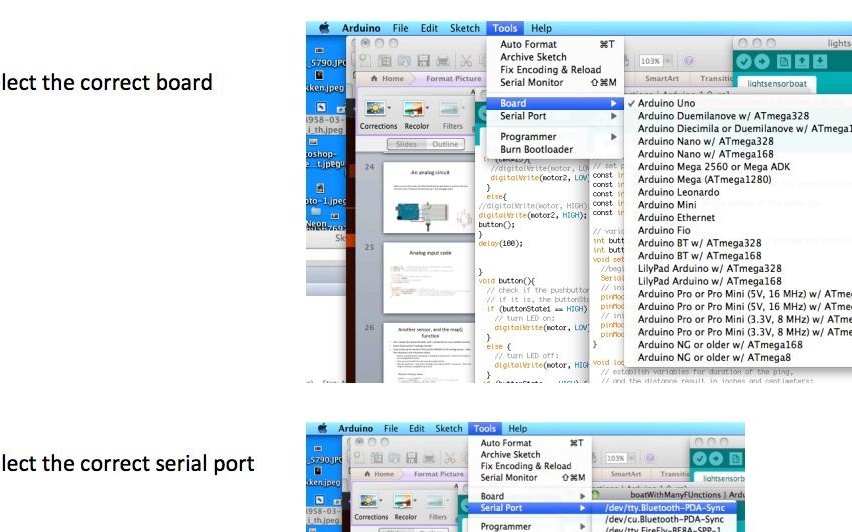
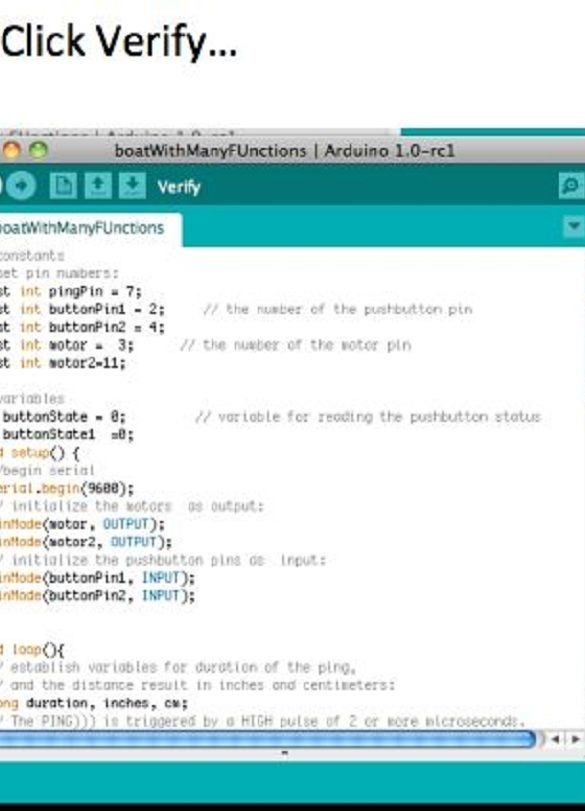
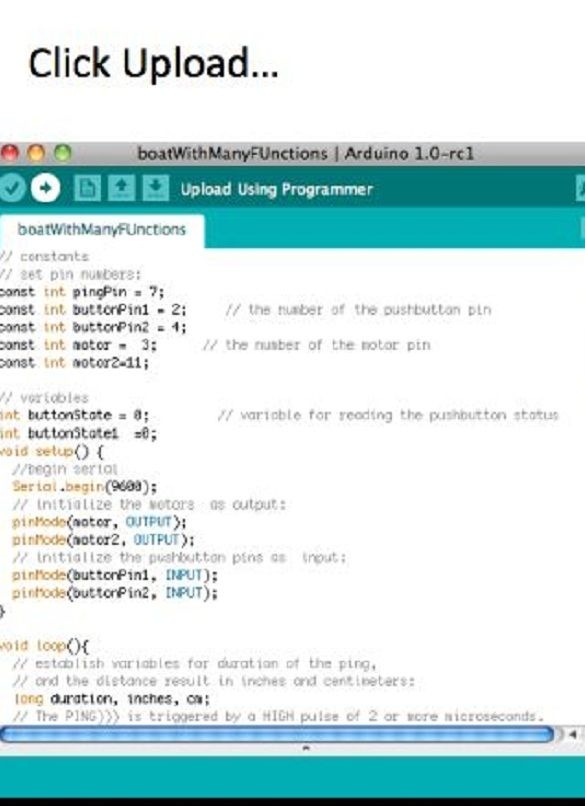
Paso 12. Descargue el boceto.
A continuación, se abre el IDE de Arduino, seleccionando el archivo y el puerto correctos, después de lo cual el autor compiló y cargó el código en el controlador.
Paso 13. Resistente al agua y prueba.
El autor además aisló todos los lugares potenciales de ingreso de agua con pegamento caliente. También aisló todos los cables de cortocircuito. El contenedor con Arduino está cubierto con la misma caja y sellado con cinta aislante. Las hélices están unidas a los motores. Aquí el bote está listo, ahora puedes comenzar a probar en el agua.



Video con una prueba preliminar del barco: