

La creación del proyecto comenzó en febrero de 2015. Primero el robot la línea de "Antei" era "Domovenok", un cepillo robot. Más tarde apareció "Antei 1".
La plataforma Anteya es un estuche equipado con un controlador Arduino Uno, sensores e instrumentos para diversas funciones. Antei también puede convertirse en una aspiradora, una cosechadora doméstica, un robot vigilante, etc.
Pero la característica principal de Antey es el desprendimiento de "hormigas" que mueven a Antey.
El principio de funcionamiento de nuestro complejo fue tomado de la naturaleza misma. Cada llamada hormiga puede moverse de forma independiente, pero también puede realizar un trabajo colectivo. Al mismo tiempo, no solo pueden levantar una carga mucho más pesada que su peso, sino que también pueden mover cargas increíblemente grandes para ellos.
Cada una de nuestras hormigas está equipada con un motor de vibración. Esta es una forma de propulsión bastante inexplorada. Sus ventajas son obvias. En primer lugar, este tipo de propulsión es más económico en consumo de energía. En segundo lugar, es compacto a diferencia de otros tipos de motores, pero ofrece un rendimiento decente.
Descubrimos que cada "hormiga" con un peso de 8 gramos. puede arrastrar 89 g., lo que indica que puede cargar peso 11 veces más que el suyo.
Desde la creación de Antei, ha habido una pregunta sobre la cantidad de motores de vibración, cómo se ubican en la plataforma del robot y de qué deben estar hechas las patas de las hormigas (un cepillo de dientes o patas de goma). Se han probado muchas opciones.
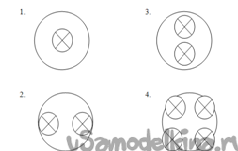
Pero se decidió establecer 2 hileras de 3-4 hormigas con patas de goma a cada lado de la plataforma, mientras que deben estar en acoplamiento rígido entre sí.
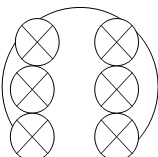
En esta realización, se logra un movimiento seguro hacia adelante, y cuando ciertos motores se apagan, giran hacia un lado.


Nuestro antey
