


Buen dia a todos! En este artículo me gustaría contar cómo usar Arduino, un conjunto de LED y un sensor ultrasónico, puede ensamblar un dispositivo que determine la distancia desde el observador al objeto, en otras palabras, telémetro. Y entonces vamos!
Que necesitamos
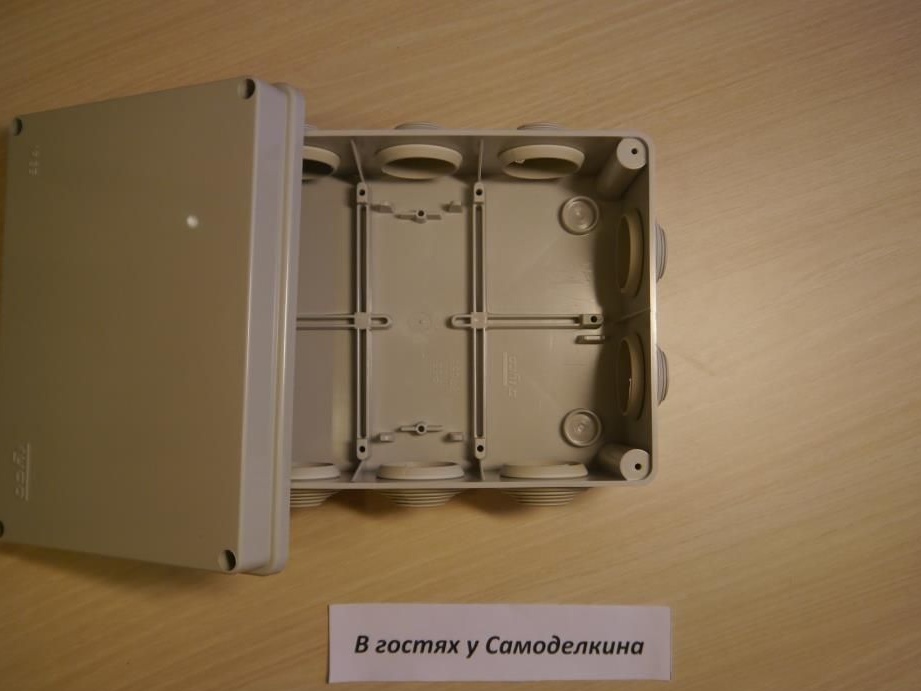
Llano caja. Es deseable que sea de tamaño pequeño, ya que contendrá un solo microcontrolador.
Utilizando transductor ultrasónico HC-SR04 Podemos determinar la distancia.

Indicador de cuatro dígitos Necesitamos generar los valores obtenidos.

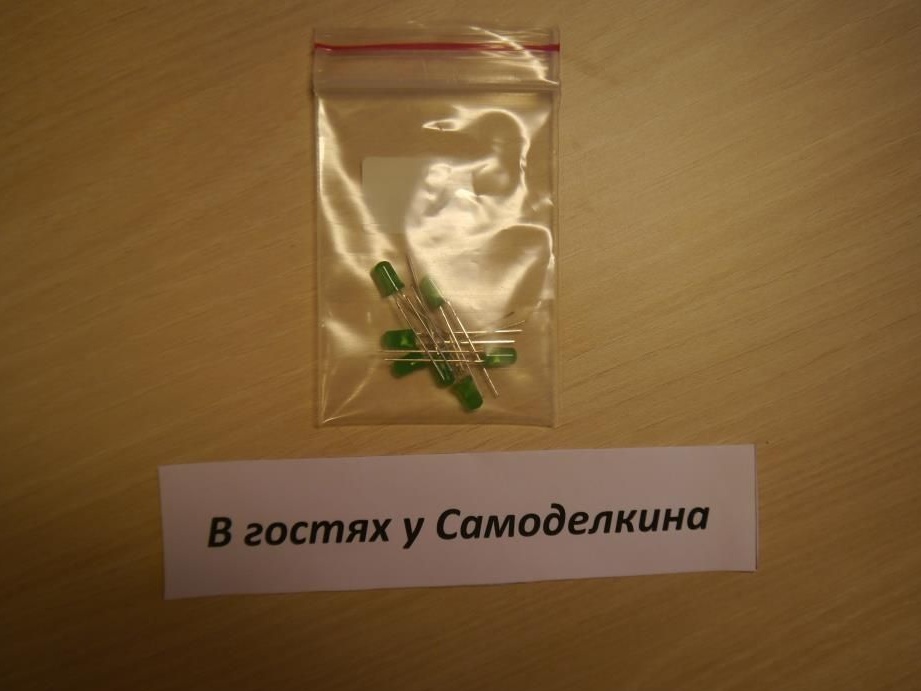
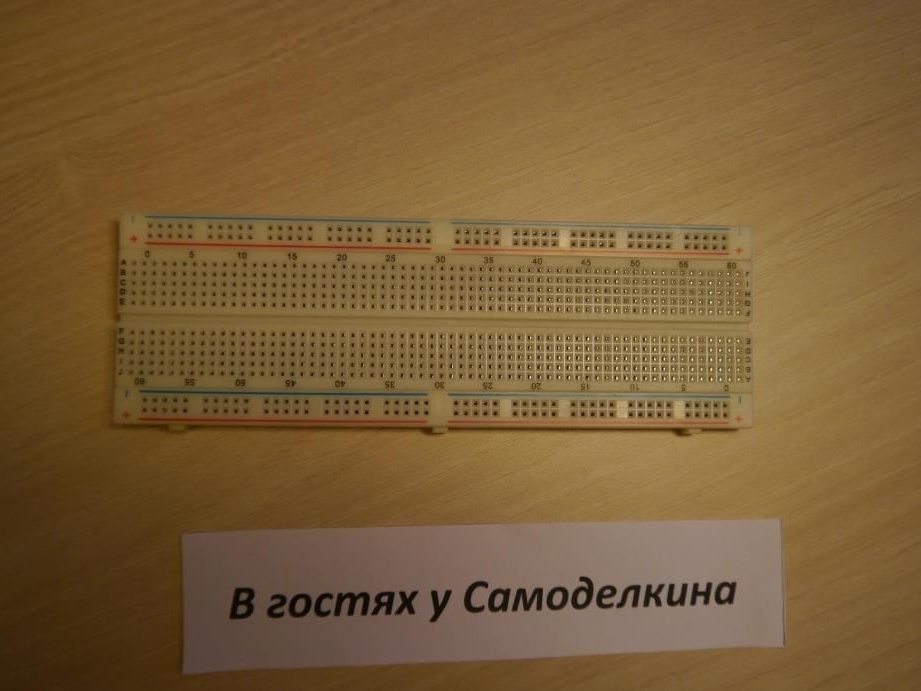
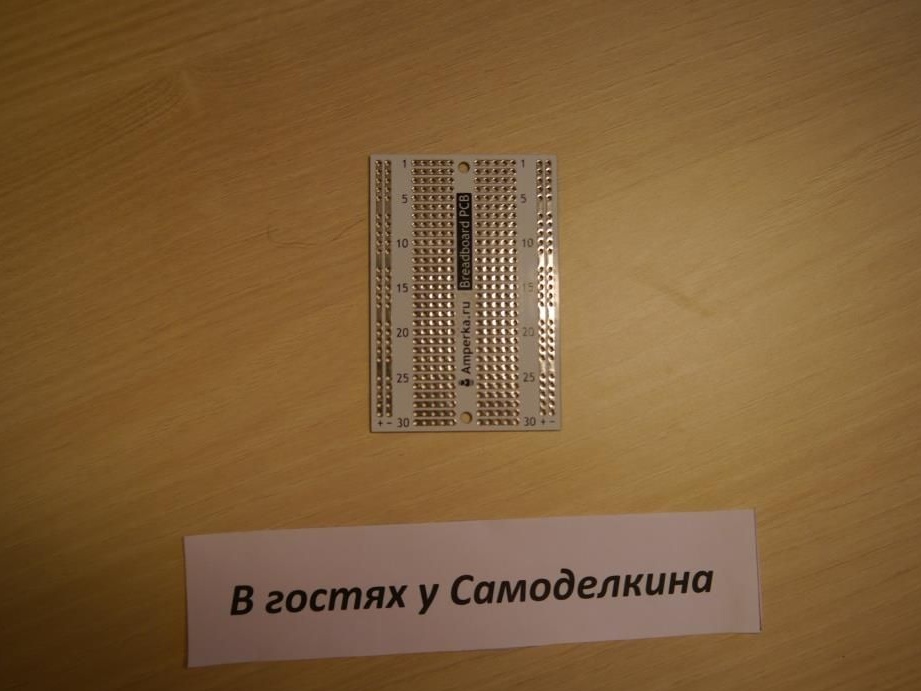
Set LEDs cualquier color (usé verde, ya que son más brillantes), resistencias a 220 ohmios alambres o puentes también protoboard

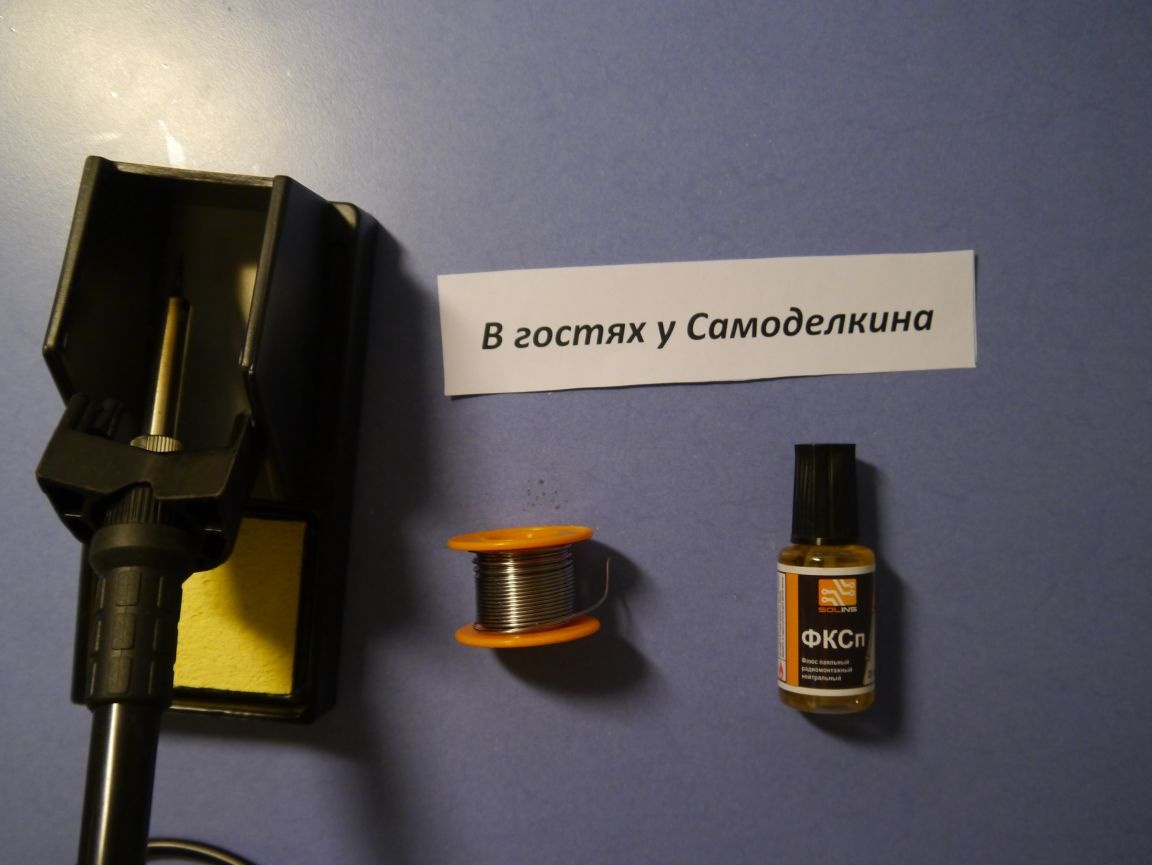
Para que los componentes de nuestro dispositivo estén bien sujetos, los soldaré.
Para esto necesitamos soldador, fundente, soldaduratambién tablero para soldar.
Y claro, sin Arduino no podemos hacer! (Puedes elegir cualquier microcontrolador, prefiero Arduino Leonardo o su equivalente Iskra Neo)

De las herramientas necesitamos un soldador, como dije anteriormente, Cuchillo y pinzas.
Ahora comencemos a ensamblar el dispositivo.
Paso # 1
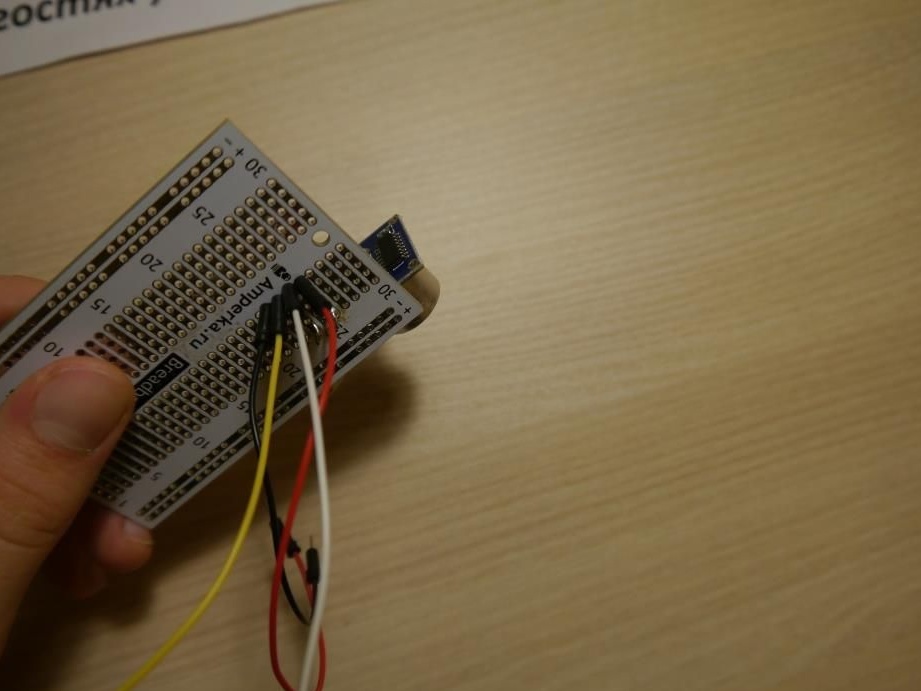
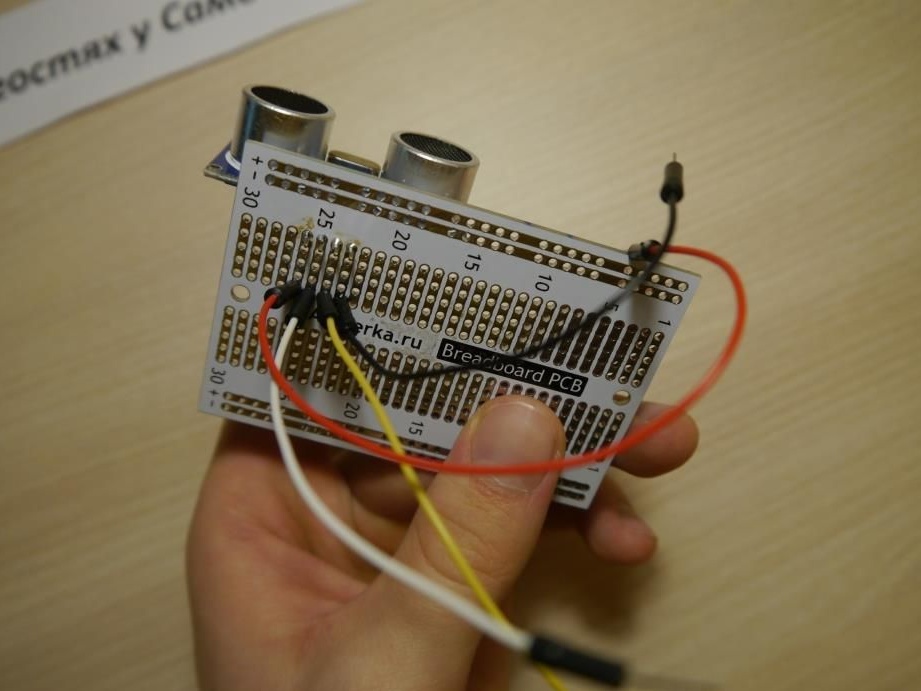
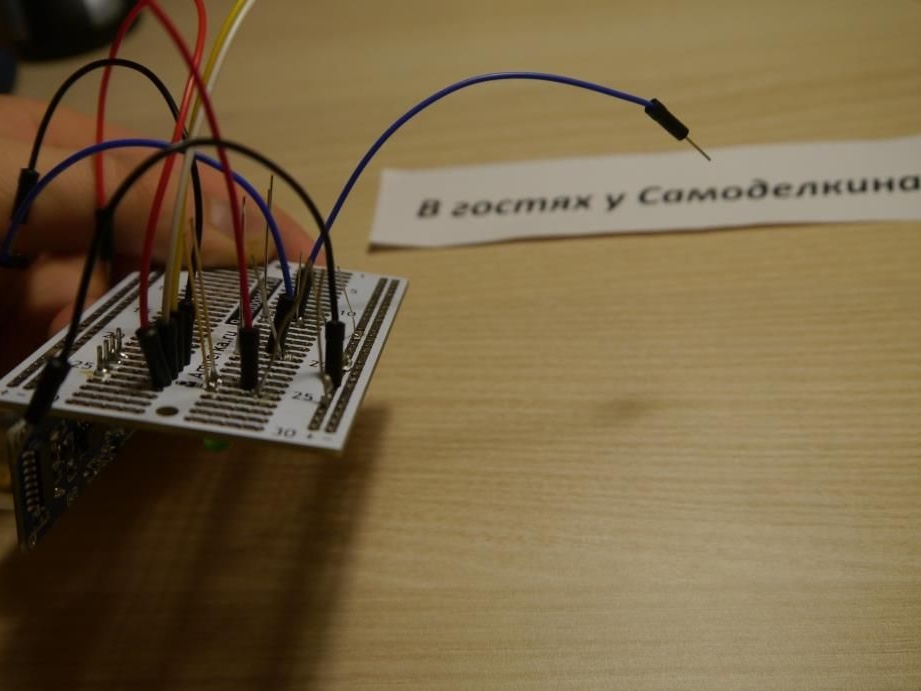
Para comenzar, utilizando una placa de pruebas, armaremos un prototipo de nuestro futuro dispositivo. Se verá algo así ...

No te preocupes! ¡No hay nada terrible en este lío de cables!
El sensor HC-SR04 tiene cuatro contactos: más, menos (que pegamos en los 5V y GND del controlador), Trig y Echo (insertamos los pines arduino en 12 y 11, respectivamente)
El indicador de cuatro dígitos tiene 3 cables: alimentación, tierra y señal. Este último está conectado al Arduino de 9 pines.
Conectamos tres LED a 6, 5 y 4 contactos del controlador en serie con resistencias. No te olvides de la polaridad. La corriente fluye de una pierna más larga a una más corta.
Eso es todo, cuando ensamblamos nuestro dispositivo en una placa de pruebas, subimos el boceto (estará al final del artículo) y nos aseguramos de que todo funcione, siéntase libre de comenzar a soldar.
Paso número 2
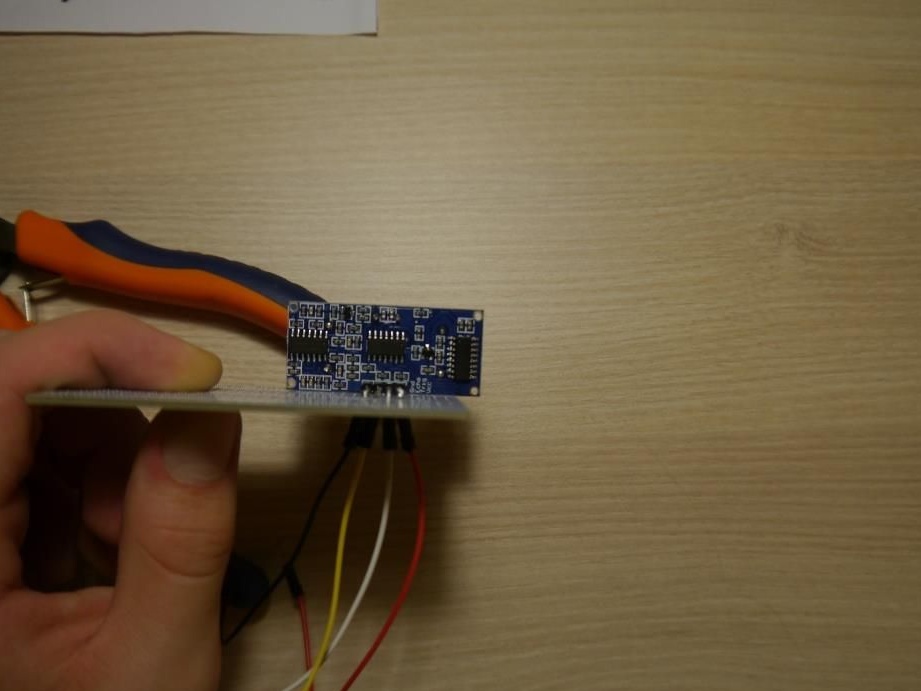
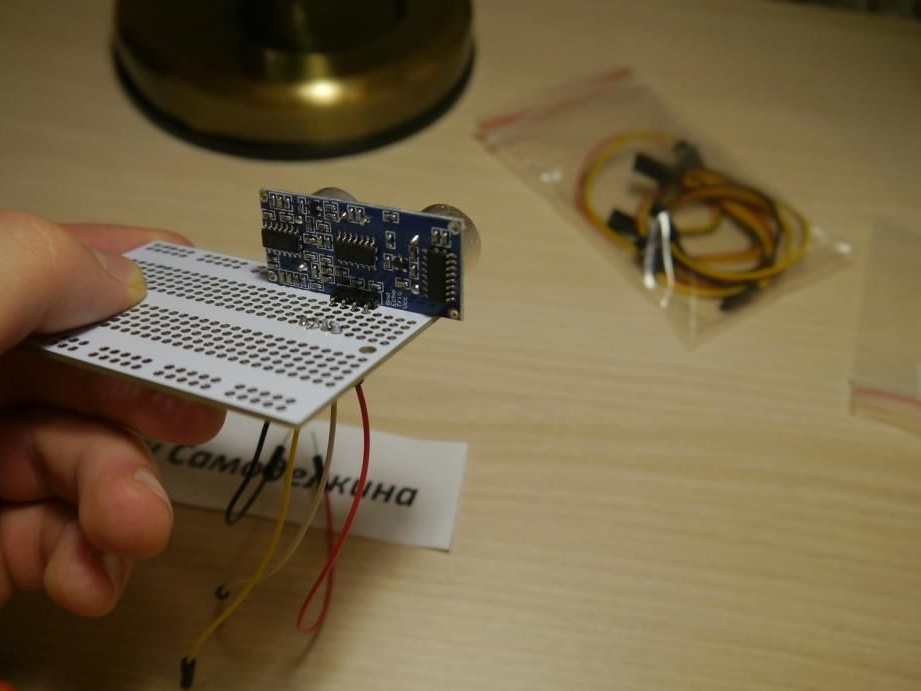
Primero, suelde el sensor ultrasónico a la placa de pruebas. Utilicé una tabla pequeña de tamaño, ya que el número de elementos no supera los 7.

Después de eso, con la ayuda de pinzas, muerda las piernas (pido disculpas por la tautología), ¡haciéndolas más cortas para que no interfieran y se vean más bonitas!

Después de eso, suelde los cuatro cables contra los contactos del sensor.
Además, no te olvides de las pinzas!
Paso 3
El sensor está en su lugar, queda soldar los tres LED junto con las resistencias.
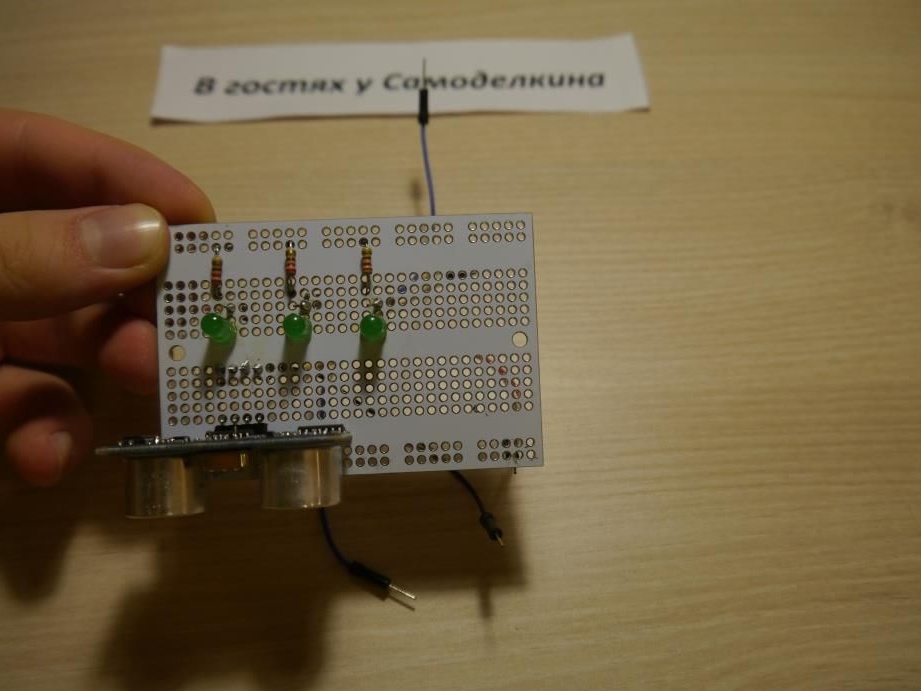
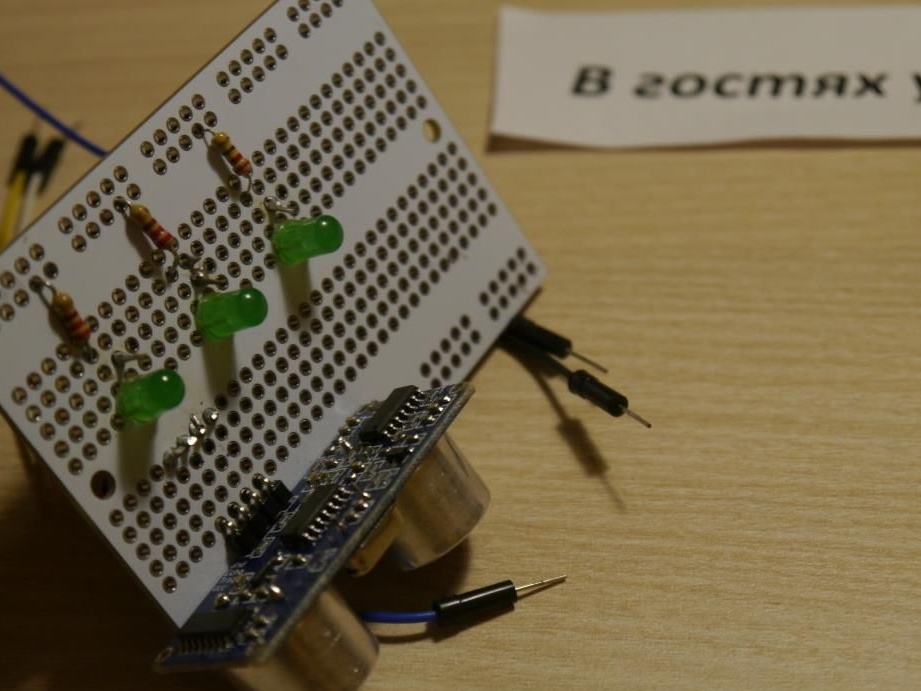
En el reverso, se ve así:
Paso 4
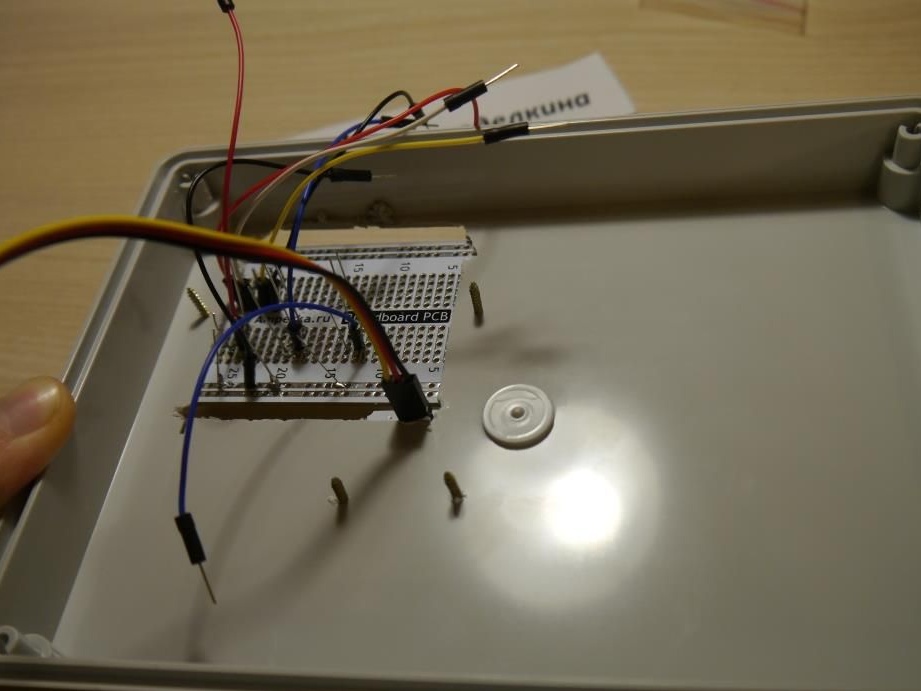
En el lado de la caja, corte un agujero redondo para la comida.

En la tapa, debe cortar una cavidad del tamaño (un poco más pequeño en longitud) de su placa de prueba, y también perforar agujeros para tornillos.


Ahora, si atornillamos un tablero vacío sin elementos (lo hice solo para demostración ...), obtenemos algo como lo siguiente:

Paso 5
Entonces, para hacerlo más conveniente, propongo conectar primero los cables al arduino, y solo luego atornillar la placa a la tapa de la caja. Además, no se olvide de nuestro indicador, que coloqué encima del diseño.



¡Todo en este dispositivo está terminado!
Solo queda descargar el siguiente bosquejo y disfruta el juguete!
#include
#include
Sonda NewPing (12.11, 400);
int a, j, b;
sin signo largo t = 0;
int masiv [] = {1,0,0,0,1,0,0,0,1};
configuración nula ()
{
para (int i = 4; i & lt; 7; i ++)
{
pinMode (i, SALIDA);
}
displayClear (9);
para (int i = 4; i & lt; 7; i ++)
{
digitalWrite (i, 0);
}
}
bucle vacío ()
{
j = 7;
para (int i = 0; i100) tono (2,70);
digitalWrite (j, masiv [i]);
while (millis () & lt; = t + b)
{
retraso (50);
a = sonar.ping_cm ();
displayInt (9, a);
b = a;
}
t = millis ();
si (j == 4) j = 7;
si (i == 8)
{
digitalWrite (4.1);
while (millis () & lt; = (t + b) + (b * 2))
{
retraso (50);
a = sonar.ping_cm ();
displayInt (9, a);
b = a;
}
digitalWrite (4.0);
t = millis ();
}
}
Unas pocas palabras código de programa. Gracias a él, nuestros tres LED parpadearán alternativamente uno tras otro, y la velocidad de su parpadeo dependerá de la distancia al objeto, que se calcula mediante el sensor ultrasónico. Pero para que los LED parpadeen, no es del todo lógico usar la función delay (), ya que cuando se usa, el controlador se congela y no se realizan cálculos. Hay varias formas de resolver este problema. En particular, uno de ellos es el uso de la función millis (), que devuelve un número en milisegundos desde el momento en que funciona el controlador. ¿Y cómo retrasamos unos 100 milisegundos condicionales? Para hacer esto, creé un ciclo esencialmente vacío, cuya salida será solo después de estos 100 milisegundos, y luego el programa procederá a encender / apagar los LED.
Bueno eso es todo! Gracias por leer este artículo hasta el final. Espero que no solo te haya gustado, sino que también hayas inspirado un nuevo mar manualidades e inventos!