


Tomé parte de mi diseño de las instrucciones de montaje de Lego Technic 42049 y Lego Technic 42041. El resto es mi improvisación. Para el control, usaré el módulo Bluetooth asociado con el dispositivo o computadora Android. Entonces necesitamos:
- Lego Technic 42029
- Lego Technic 42033
- Arduino Pro Mini 5v AT Mega 328
- Conductor del motor L9110S
- 1 servoaccionamiento SG-90
- Módulo Bluetooth HC-05 o equivalente
- USB-UART para firmware arduino
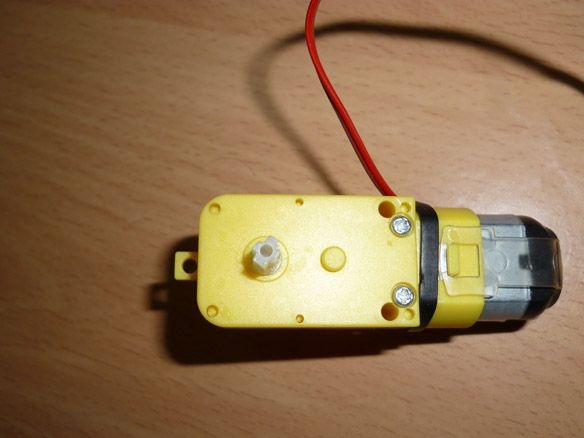
- Motor caja de cambios 6v 1: 150100 rpm
- 2 LED
- 2 resistencias 150 ohmios
- Condensador 10v 1000uF
- 2 peines de una hilera PLS-40
- Inductor 68mkGn
- 6 baterías NI-Mn 1.2v 1000mA
- Conector papá-mamá de dos pines para cablear
- Homutik
- Alambres de diferentes colores.
- soldadura
- Resina
- soldador
- Pernos 3x20, tuercas y arandelas para ellos.
- Pernos 3x40
- Pernos 3x60
Paso 1 Ensamblaje del eje trasero
Avanzar - hacia atrás se llevará a cabo por un motorreductor con un motor de 6V, una relación de transmisión de 1: 150 y una velocidad de ralentí de 100 rpm. Puedes probar otra relación de transmisión, pero, en mi opinión, esto es óptimo. El eje de la caja de cambios en ambos lados debe tener una incisión en forma de cruz y poner detalles de lego:
A continuación, recopilamos la base del eje trasero de acuerdo con las instrucciones de Lego 42029 parte 1, comenzando desde 3 páginas hasta 8 inclusive. Y agregue algunos detalles para que pueda instalar el motor y la caja de cambios.
Ver archivo en línea:
Ver archivo en línea:



Paso 2 Montaje del eje delantero
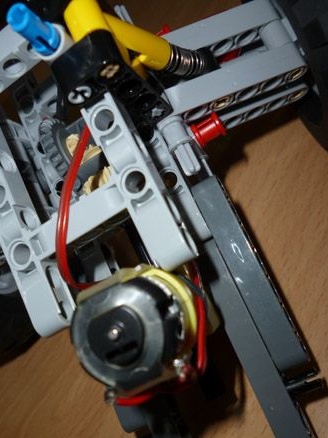
Ensamblamos la parte delantera de la suspensión de acuerdo con las instrucciones de Lego 42029 parte 1, de la página 21 a la 23. Tomamos el trapecio de la segunda parte de Lego de la página 6 a la 11. El servo SG-90 es muy adecuado para girar las ruedas. Para fijarlo en nuestro modelo, es necesario perforar cuidadosamente, para no tocar las partes internas del servo, un orificio pasante con un diámetro de 3.2 mm o simplemente cortarlo con un cuchillo de papelería. Y también cortar las partes sobresalientes ("alas" para la fijación). Insertamos un tornillo en el agujero hecho y lo fijamos con tuercas. En el servoeje ponemos una palanca con una parte atornillada de lego:





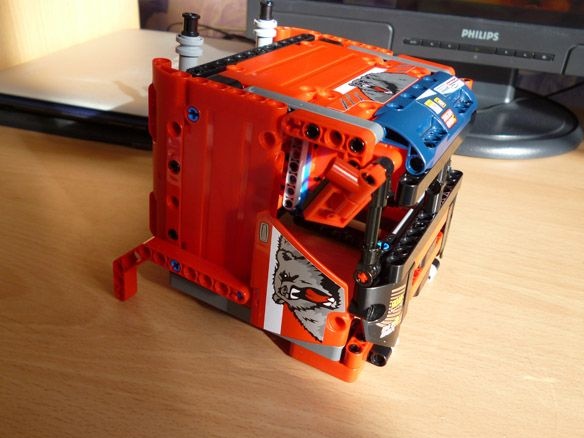
Paso 3 Montaje de la base y la cabina
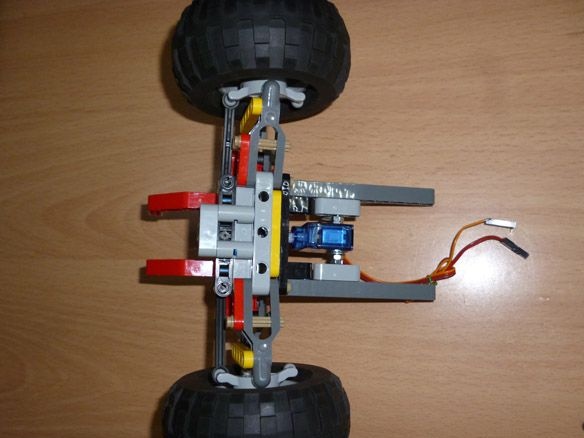
Conectamos ambos puentes como se muestra en la foto:
Montamos la cabina de acuerdo con las instrucciones de Lego 42041. A partir de las páginas 39 a 47 de la primera parte. Más allá de las páginas 5 a 28 de la segunda parte. Además del paragolpes de las páginas 38 a 43 de la segunda parte de las instrucciones.
Ver archivo en línea:
Ver archivo en línea:


Ver archivo en línea:
Ver archivo en línea:
Paso 4 electricidad
Para el control, utilizaremos el Arduino Pro Mini y el módulo Bluetooth. El Pro Mini se puede reemplazar con cualquier otra placa Arduino. Elegí el Pro Mini, por lo que es el más pequeño. Se necesita el controlador del motor para conectar el motor.
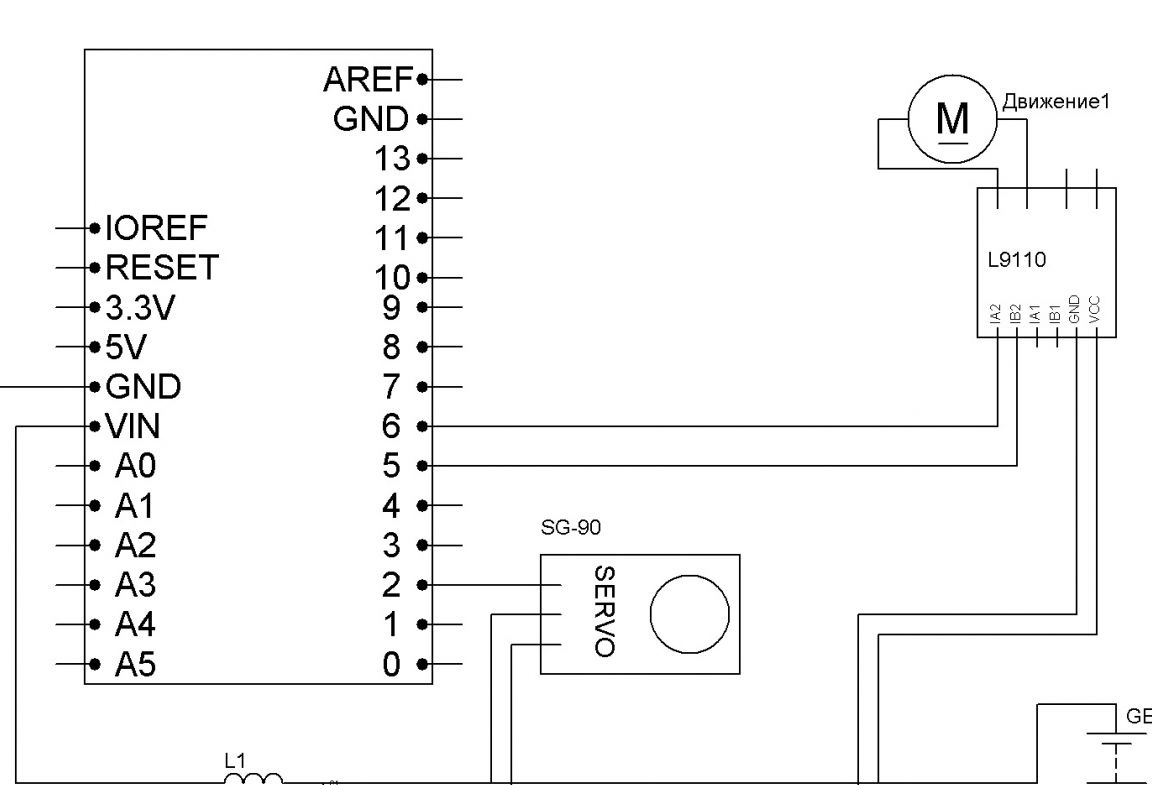
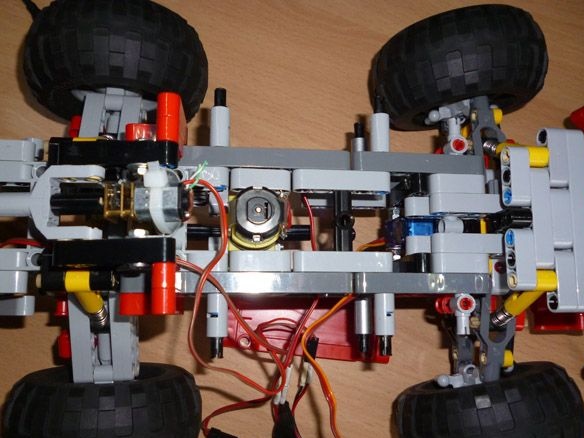
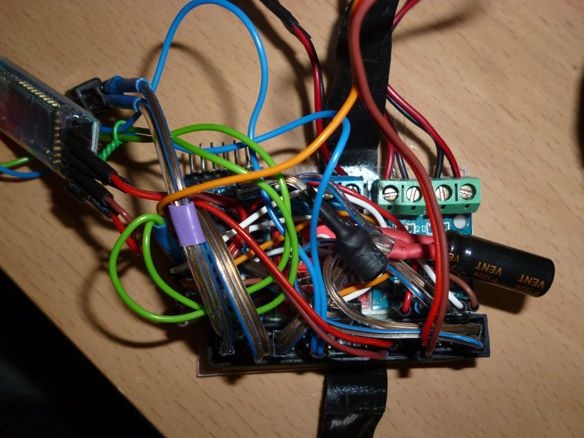
Conexión de todos los componentes con cables Dupont de madre a madre. Alimentación: 6 baterías NI-Mn 1.2v 1000mA conectadas en serie. Un condensador de baja potencia, un inductor que también encontrará, necesita estabilizar la potencia del microcontrolador. Los ánodos de los dos LED están conectados a 4 pin arduino, los cátodos a GND. Las resistencias se seleccionan para los LED utilizados. Para mayor comodidad, enrolle las baterías con cinta.

Lo pegamos todo en una cinta de doble cara en base a:
Colocamos a nuestro electricista entre las ruedas y cerramos:
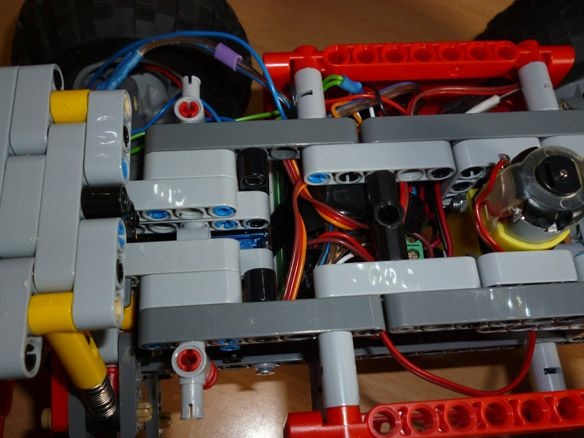
Agregue un par de trazos:


Paso 5 Configuración de Bluetooth
Los módulos Bluetooth más asequibles hoy en día son los HC-05 y HC-06. Son abundantes en las tiendas en línea chinas. Las diferencias entre ellos son que el primero puede funcionar tanto en modo maestro (esclavo) como en modo esclavo (maestro). El segundo es un dispositivo puramente esclavo. En otras palabras, HC-06 no puede detectar un dispositivo emparejado y establecer una conexión con él, solo puede obedecer al maestro.
Breves características de los módulos:
- Chip Bluetooth - BC417143 fabricado por
- protocolo de comunicación - Especificación Bluetooth v2.0 + EDR;
- radio de acción: hasta 10 metros (nivel de potencia 2);
- Compatible con todos los adaptadores Bluetooth que admiten SPP;
- La cantidad de memoria flash (para almacenar firmware y configuraciones) - 8 Mbit;
- la frecuencia de la señal de radio - 2,40 .. 2,48 GHz;
- interfaz de host - USB 1.1 / 2.0 o UART;
- consumo de energía: la corriente durante la comunicación es de 30-40 mA. El valor actual promedio es de aproximadamente 25 mA. Una vez establecida la conexión, el consumo de corriente es de 8 mA. No hay modo de suspensión.
Por lo general, los módulos se venden como dos placas soldadas juntas. El más pequeño es un módulo de fábrica, ampliamente utilizado en varios electronica dispositivos. Grande: una placa especial para bricolaje.
Así es como se ven los módulos de bricolaje HC-05 y HC-06:
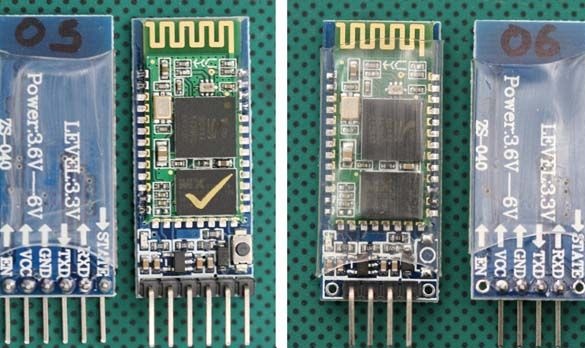
En principio, puede usar cualquier módulo que desee. Un módulo sin una placa de prueba cuesta menos, pero luego tendrá que ocuparse de la fuente de alimentación de 3.3 V para el módulo y atormentarse soldando cables al módulo. Elegí lo óptimo, en mi opinión, en la relación precio / funcionalidad HC-06.
Nos conectamos de la siguiente manera:
Arduino Pro Mini - Bluetooth
D7 - RX
D8 - TX
5V - VCC
GND –GND
Para un funcionamiento correcto, el módulo debe estar configurado. Configuraremos los comandos AT ingresados en la ventana de terminal. Doy un ejemplo de configuración del módulo HC-05. Si tiene una configuración diferente puede ser diferente. Para que nuestro módulo reciba comandos, primero flasheamos el Arduino con el siguiente firmware:
En este caso, Arduino actúa como un puente entre las computadoras y el módulo. En el firmware, uso la biblioteca SoftwareSerial. A altas velocidades, funciona de manera inestable. Si desea alta velocidad, puede conectar el módulo directamente a los contactos Arduino RX y TX y reescribir el firmware. Pero en mi caso, trabajaremos con el módulo a una velocidad de 9600. Entonces, después del firmware, abra el terminal e ingrese:
"AT" (sin comillas) debería aparecer la respuesta "OK" (significa que todo está conectado correctamente y el módulo funciona)
"AT + BAUD96000" (sin las comillas) debería aparecer la respuesta "OK9600".
Si tiene la respuesta correcta, vaya al siguiente paso.
Paso 7 Firmware
Para escribir el firmware y el firmware en sí, utilizo el IDE de Arduino. La versión actual para hoy es 1.8. En realidad firmware:
Paso 8 Configura tu teléfono.
En un teléfono Android, debe instalar un programa para controlar el robot a través de Bluetooth. Hay muchos de ellos. Puede ingresar "Bluetooth Arduino" en Google play y elegir a su gusto. Me gustó el BT Controller. Descargue e instale en su teléfono o tableta Android. Luego, a través de la configuración de Android, debe establecer una conexión con nuestro módulo. La contraseña para la conexión es "1234" o "0000". Luego, configure el programa para los comandos apropiados. La lista está abajo.
Paso 9 Configuración de la computadora (si es necesario)
Si es necesario, o solo por conveniencia para el control, puede usar una computadora o computadora portátil. Para hacer esto, la computadora debe tener Bluetooth. Establecemos comunicación con nuestro módulo a través de los controles en la computadora. A continuación, necesitamos un terminal para enviar comandos. Cualquier conveniente para ti.Una vez grabado el firmware, el control se realiza mediante los siguientes botones (comandos):
W - adelante
S - espalda
A - izquierda
D - derecha
F - parar
G - volante
K - faros
L - faro apagado
Introducir comandos constantemente es un inconveniente, por lo que recomiendo usar el programa para enviar comandos. Estoy usando Z-Controller. En el programa, seleccione el puerto (puerto com a través del cual se realiza la conexión) y configure las teclas para los comandos. Configurar inactivo e intuitivo.
