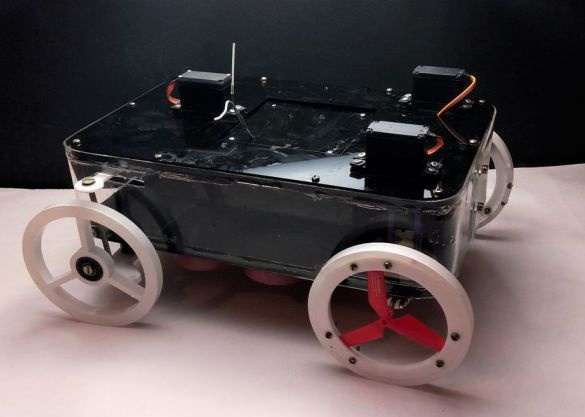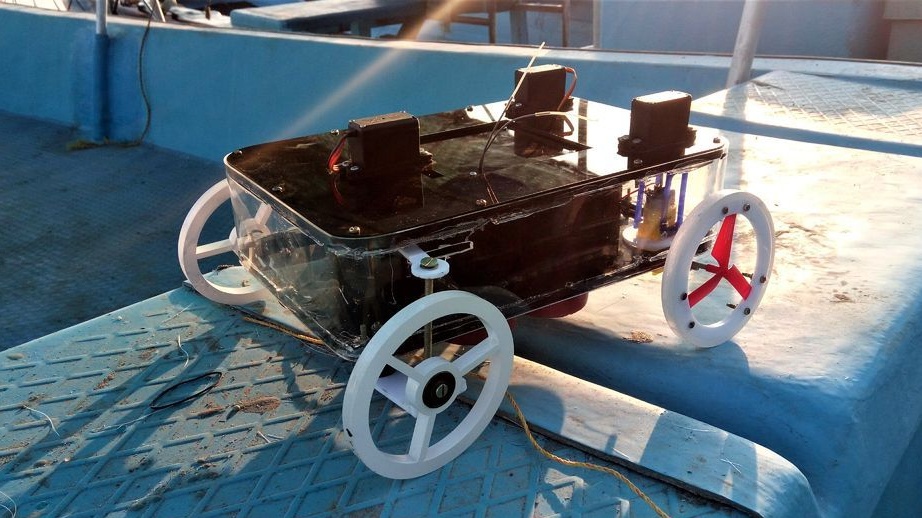



En este artículo, consideraremos la fabricación por artesanos indios de un vehículo todo terreno que se mueva tanto en tierra como en agua. Vehículo todo terreno consiste en una plataforma flotante con ruedas y una hélice. Los mecanismos se controlan por control remoto a través de Arduino UNO
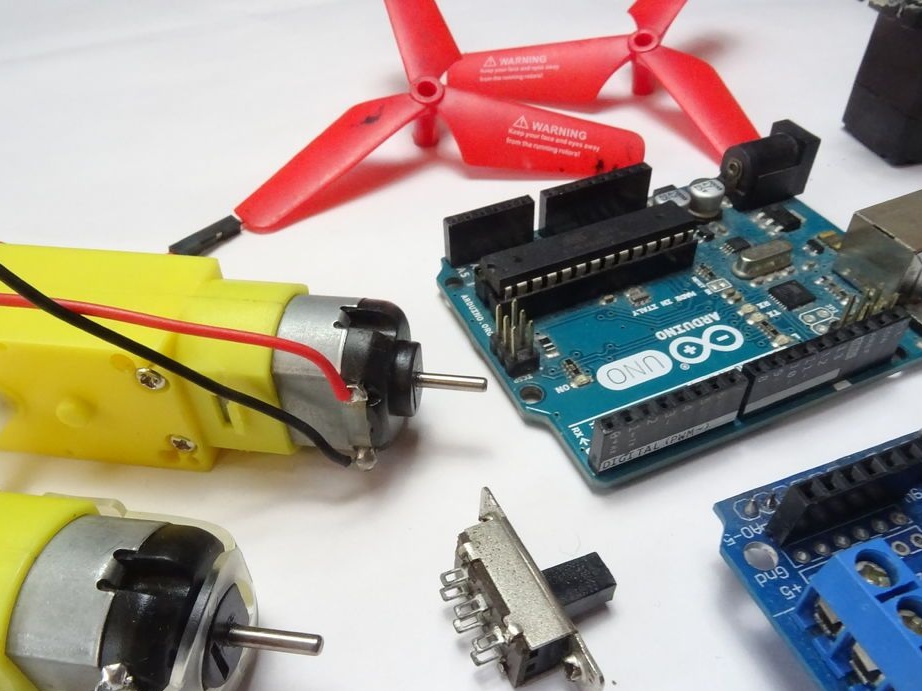
Herramientas y materiales:
-
-AKB 9V;
-Conmutador;
-Acrilo;
Madera contrachapada;
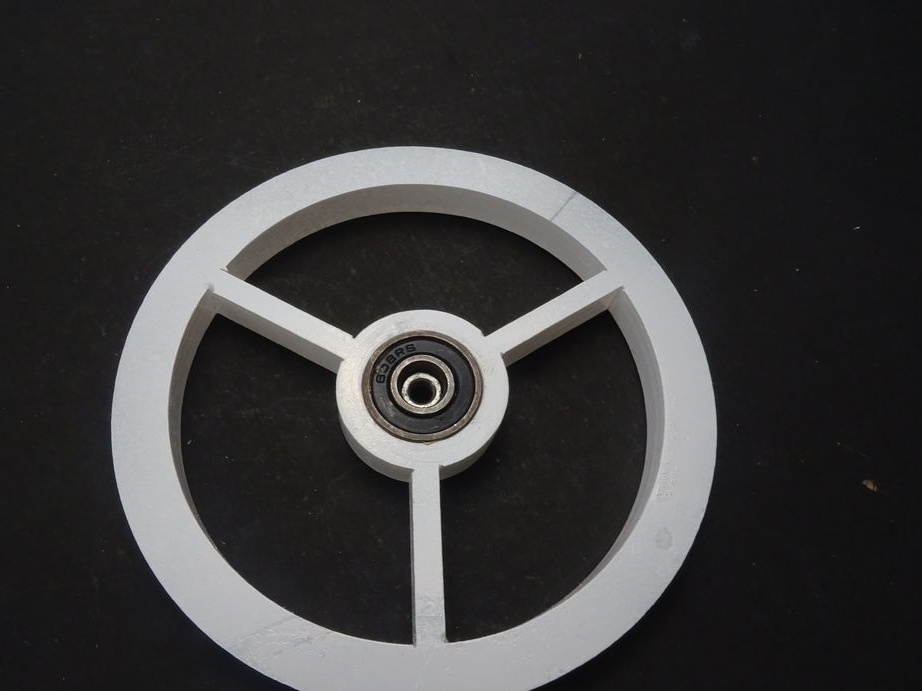
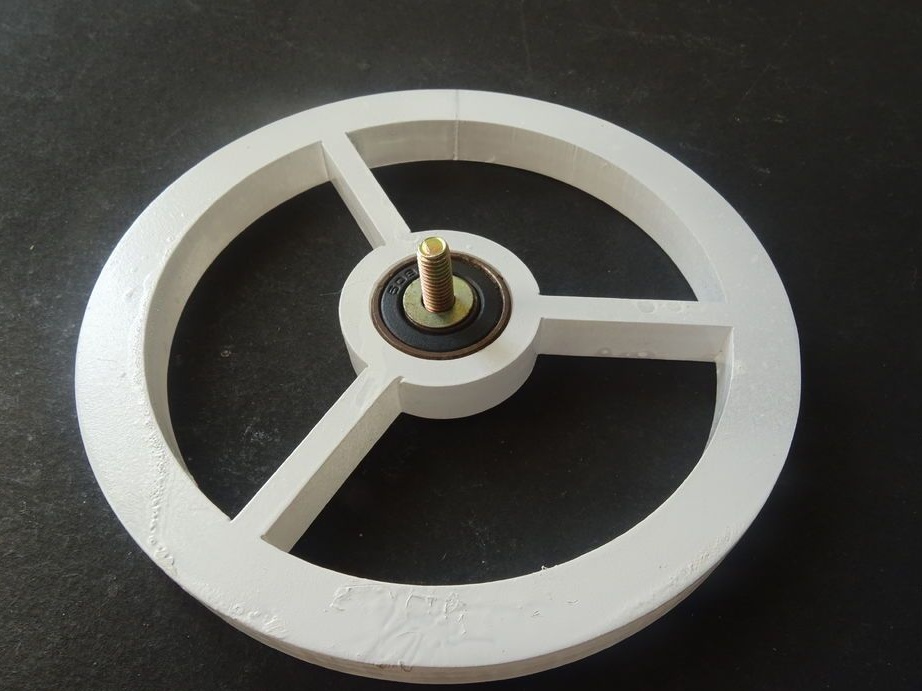
(por referencia, el rodamiento es de 8 x 16 x 5 mm, el autor indica 8 * 22 mm)
-Dos hélices;
-Sujetadores;
-Pisos;
-Pistola de pegamento;
-Super pegamento;
Resina epoxi;
-Soldador de hierro;
-Taladro;
-Cortador láser;
-Saw;
- destornillador
-Taladro;
-Soldador de hierro;
-Board;
-Ordenador con software;


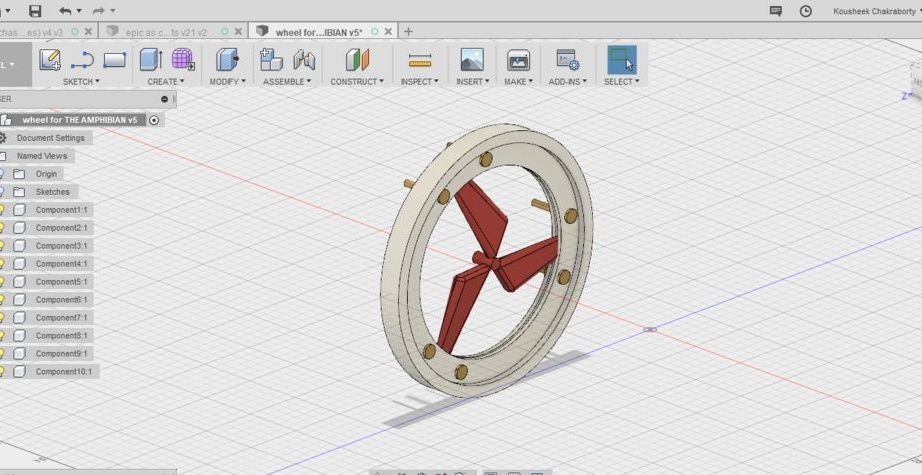
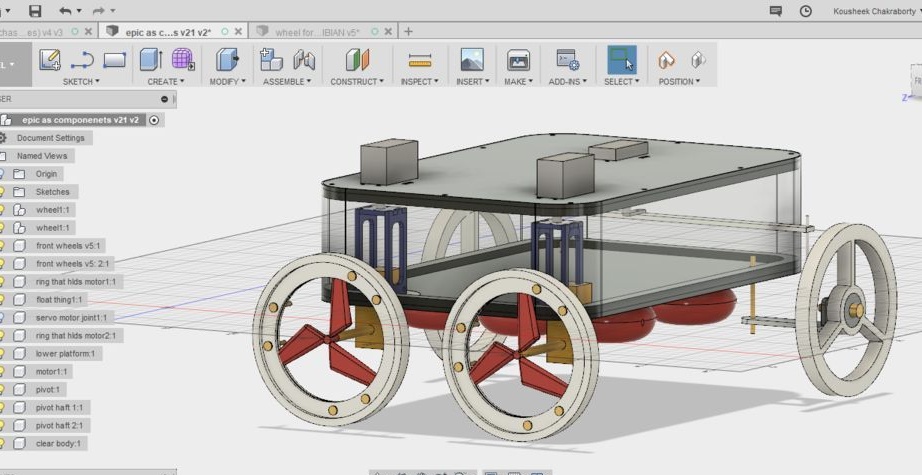
Paso uno: diseño
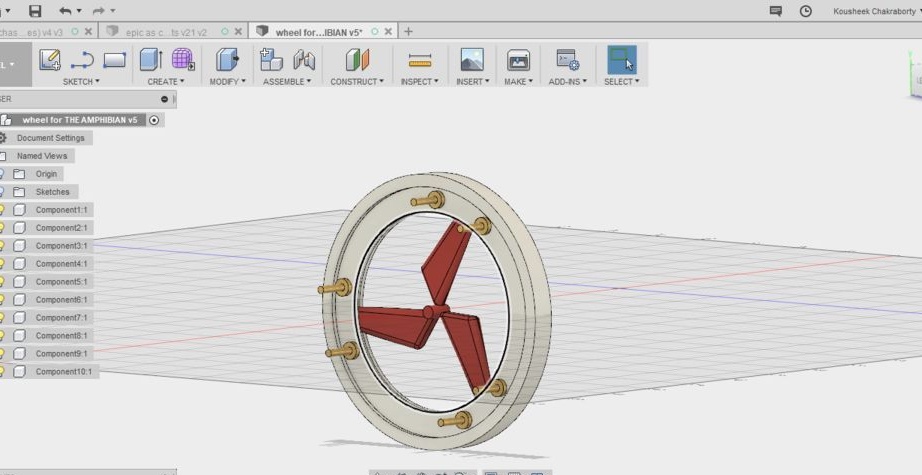
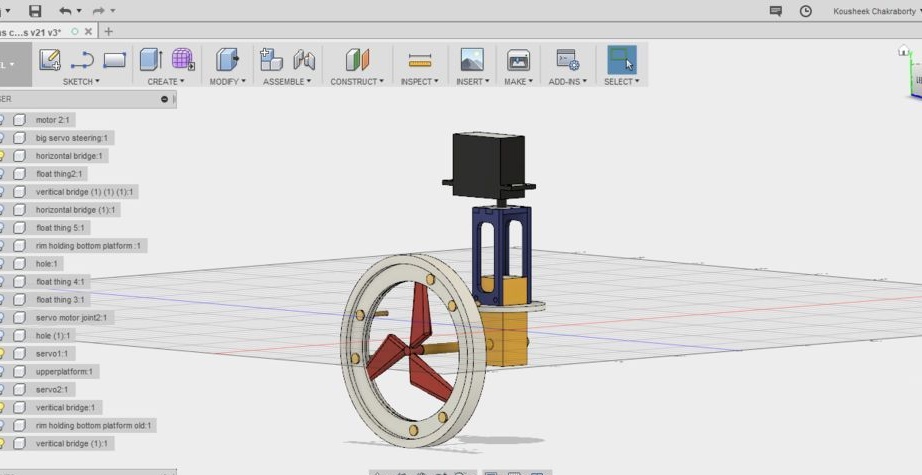
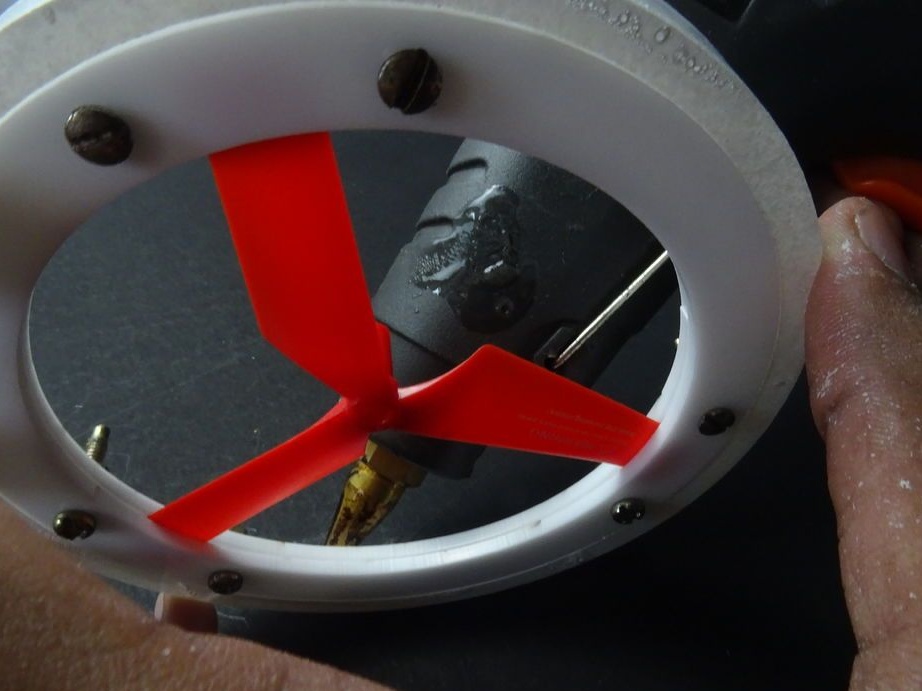
Para crear el proyecto, los maestros utilizaron el programa Fusion 360. Toda la dificultad consistía en combinar el movimiento en tierra y en el agua. Al diseñar las ruedas, los maestros desarrollaron un sistema en el que los tornillos se abrían en el agua, pero en vista de la complejidad del diseño, simplemente integraron las hélices del juguete de los niños dentro de la rueda. Esto permite que las ruedas muevan el vehículo todo terreno en tierra, y cuando entran al agua, los tornillos se encienden.
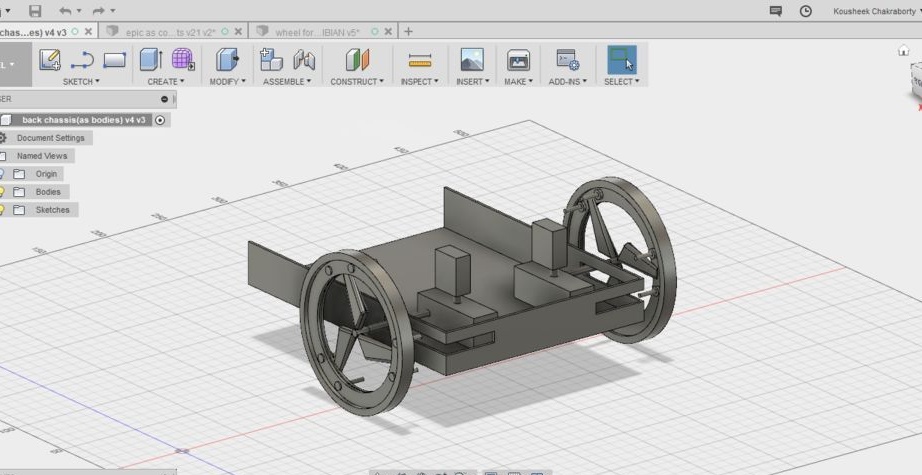
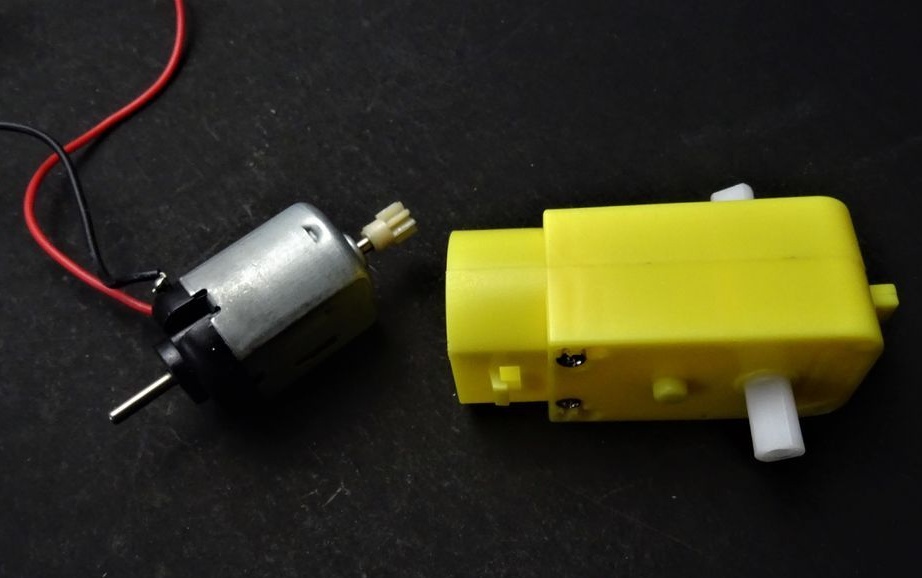
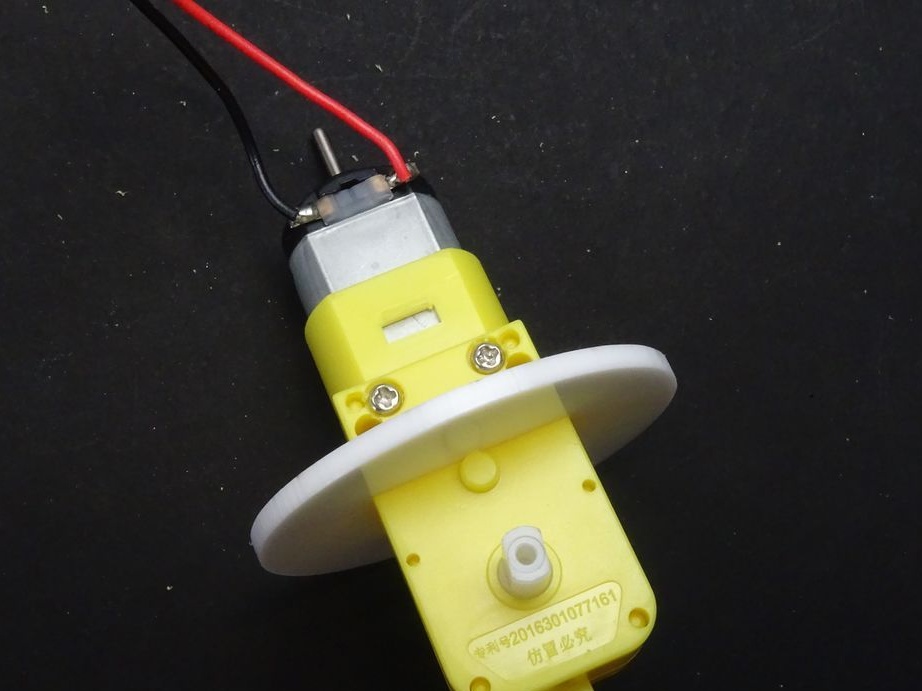
Para implementar esta idea, debe poder girar las ruedas traseras perpendicularmente al vehículo todo terreno cuando conduzca sobre el agua. Esto se hizo posible cuando se sacaron los engranajes del motor del cuadro. Las cajas de engranajes de plástico y el agua que ingresan no dañarán.
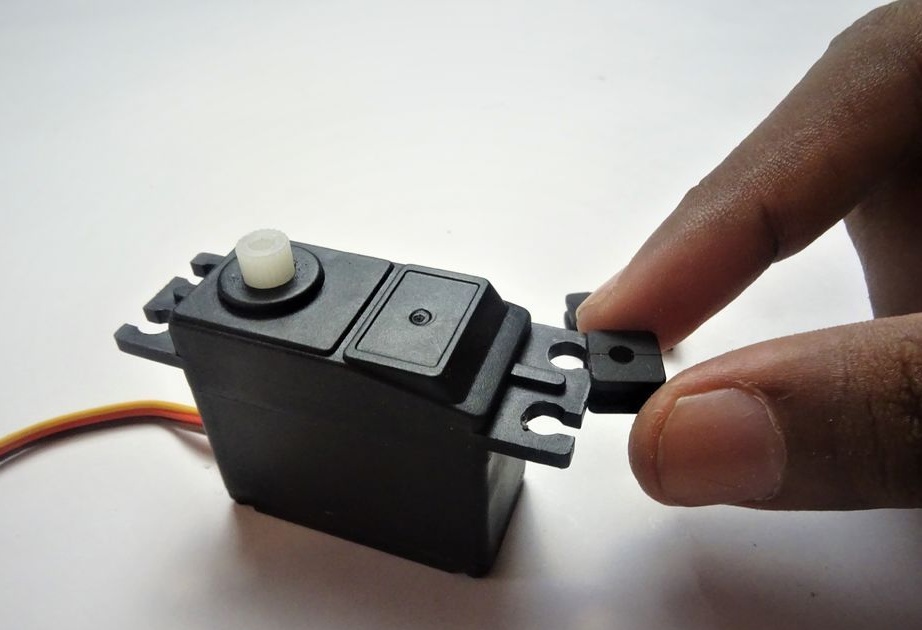
La rotación de los tornillos de las ruedas se realizará mediante un servoaccionamiento.
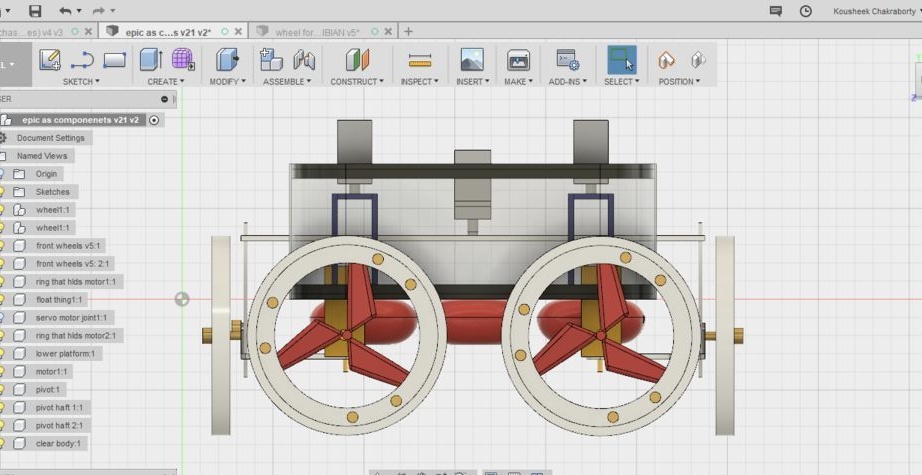
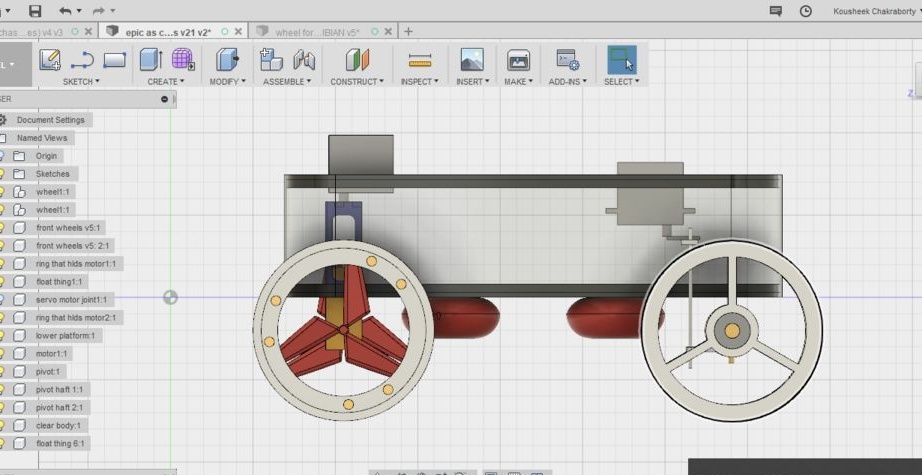
El vehículo todo terreno tiene dos mecanismos de giro. Uno para controlar las ruedas traseras de las hélices en el agua, y el segundo, para conducir en tierra, controla las ruedas delanteras. El ángulo de rotación de las ruedas delanteras es de 35 grados, lo que le permite realizar giros bruscos.
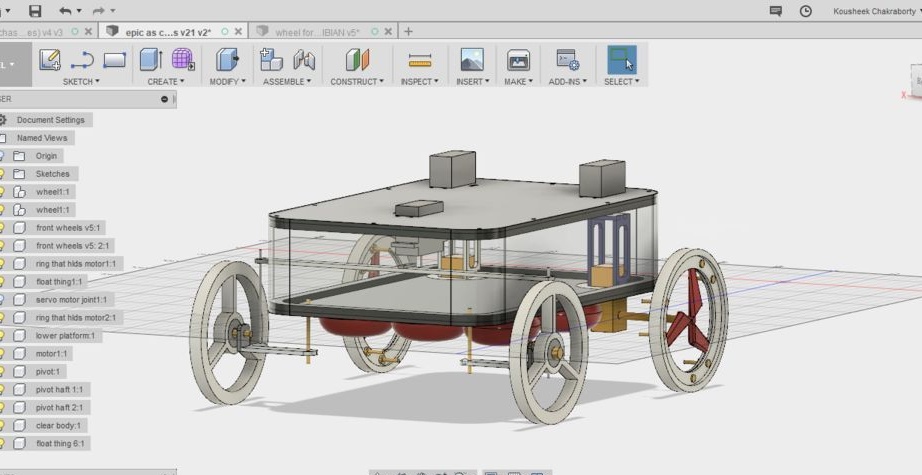
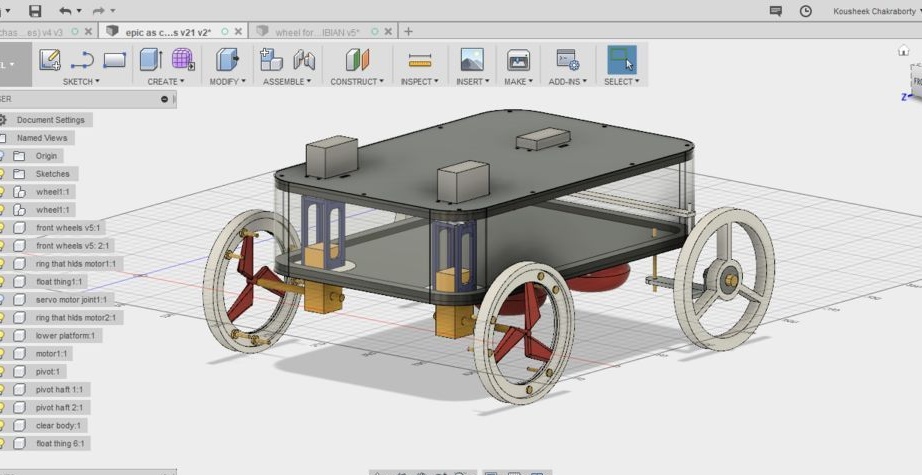
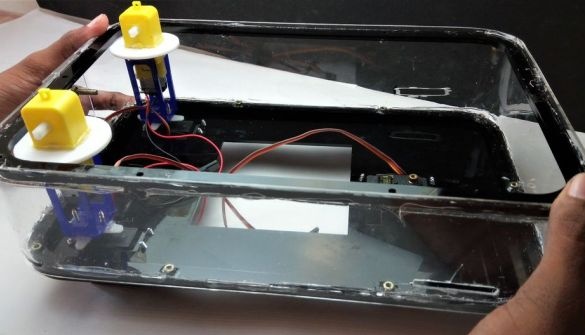
En las imágenes a continuación, puede ver la transformación del vehículo todo terreno cuando se mueve por tierra y agua.
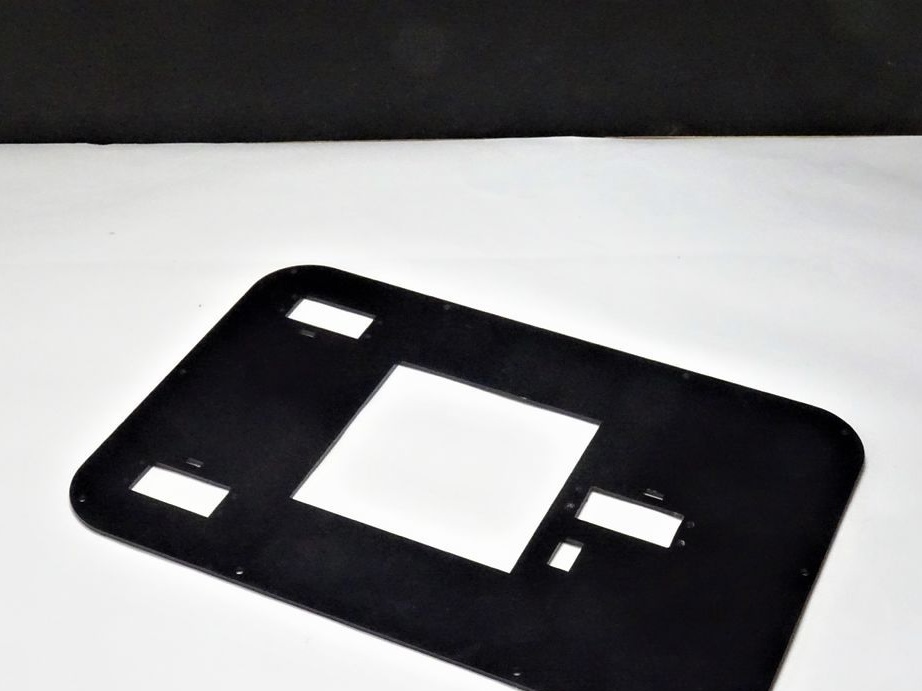
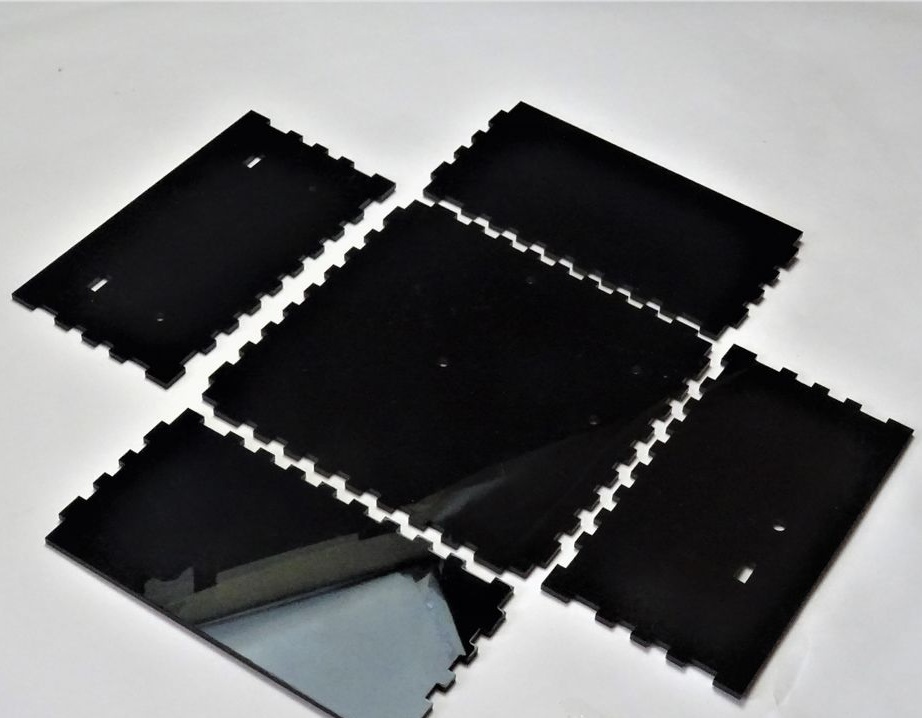
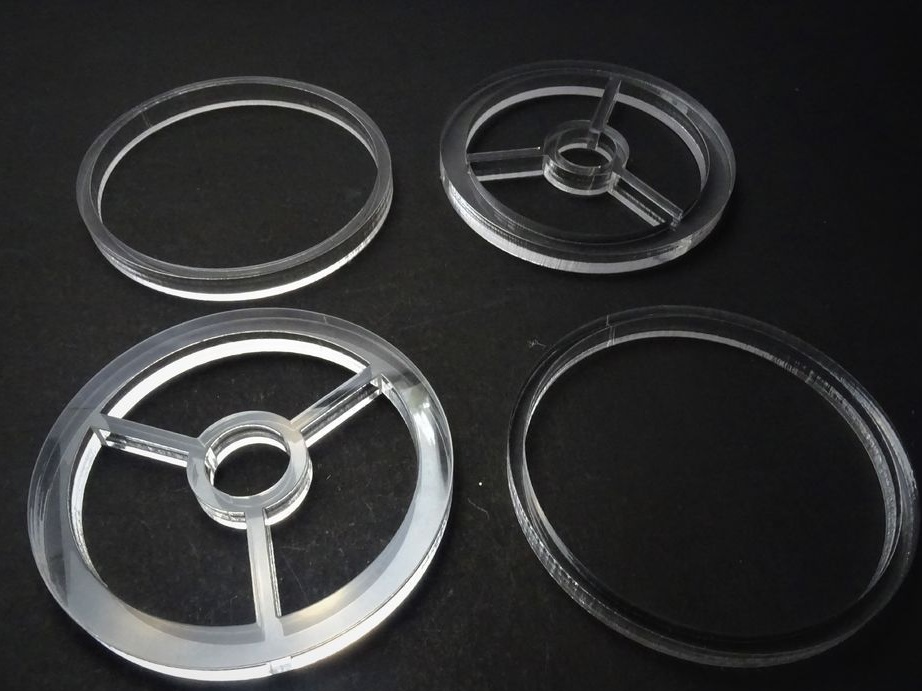
Paso dos: corte por láser
Para el vehículo todo terreno, el maestro utilizó acrílico de diferentes grosores y colores.
Capa superior negra 3 mm x 1
Capa inferior negra 3 mm x 1
Marco lateral negro 5 mm x 2
Pared lateral transparente 2 mm x 1
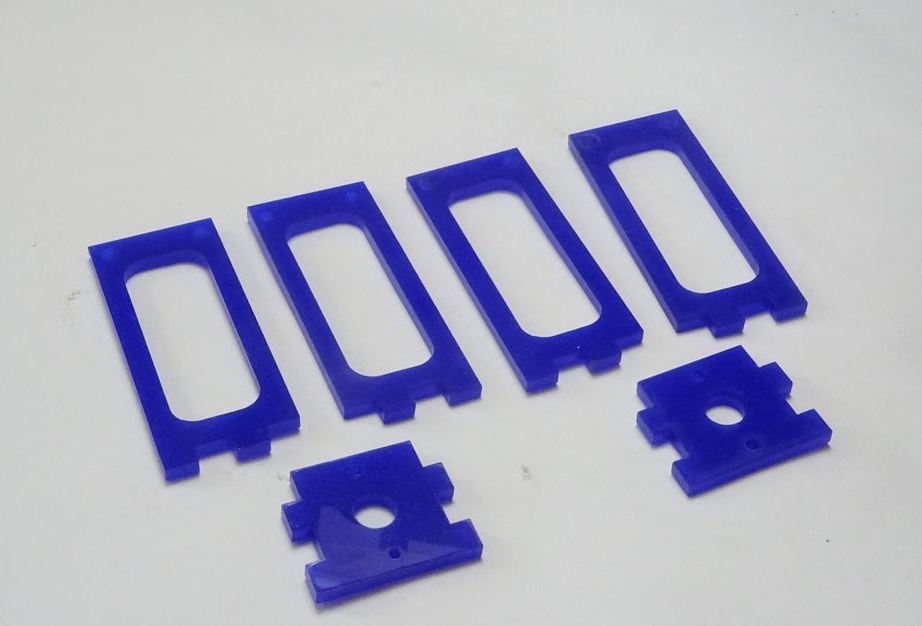
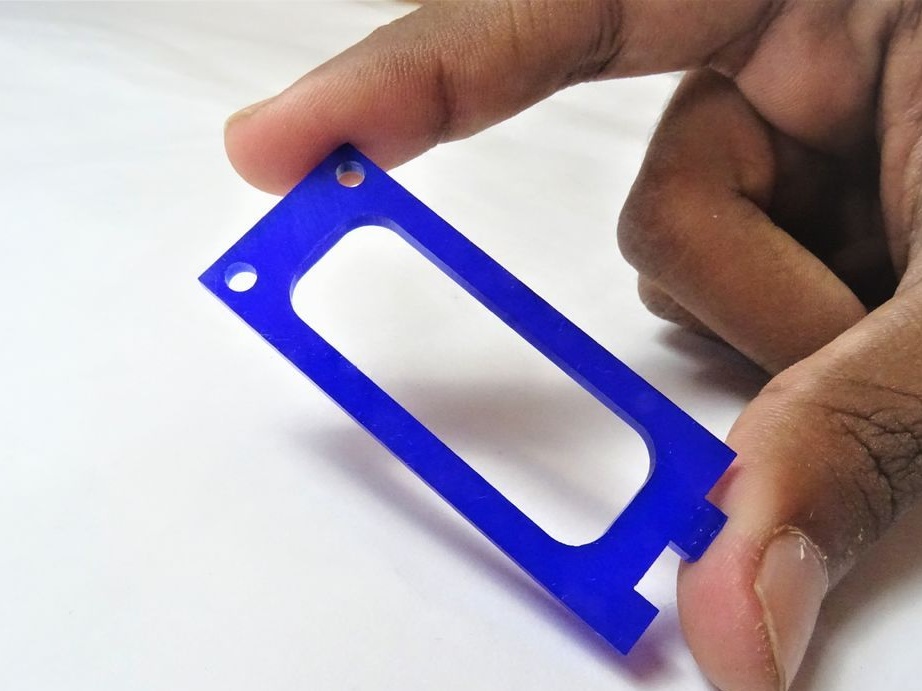
Lado de potencia azul 3 mm x 4
Pieza superior de puente azul 3 mm x 2
Motor DisK Blanco 3 mm x 2
Rueda delantera blanca 10 mm x 2
Llanta interior (rueda trasera) Blanco 3 mm x 4
Llanta exterior (rueda trasera) Blanco 10 mm x 2
Dirección blanca 3 mm x 1
Cajonera negra 3 mm x 1
Tapa compartimento negro 3 mm x 1
Eje motor trasero blanco 3 mm x 2
Panel frontal blanco 5 mm x 2



Puede descargar el archivo para el CNC desde el enlace.
Laser Cutting Rover Parts.zip
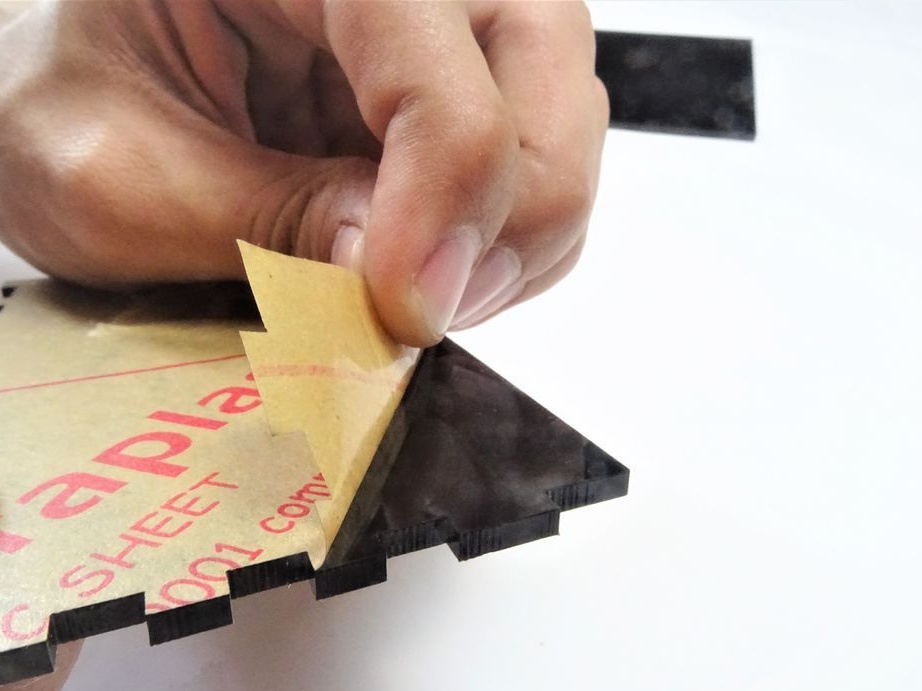
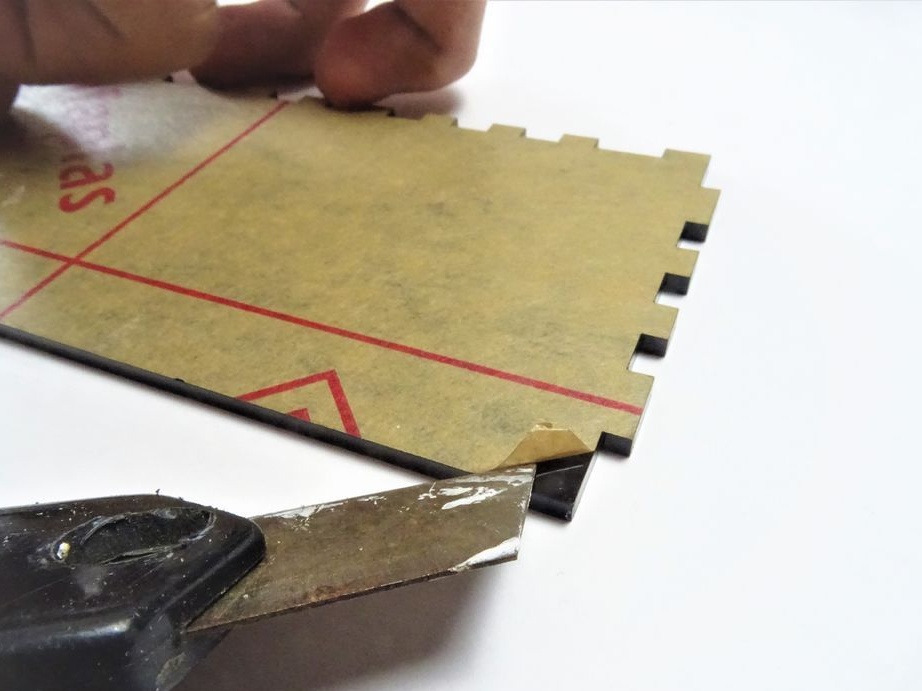
Después de fabricar las piezas, elimina la capa protectora de ellas.
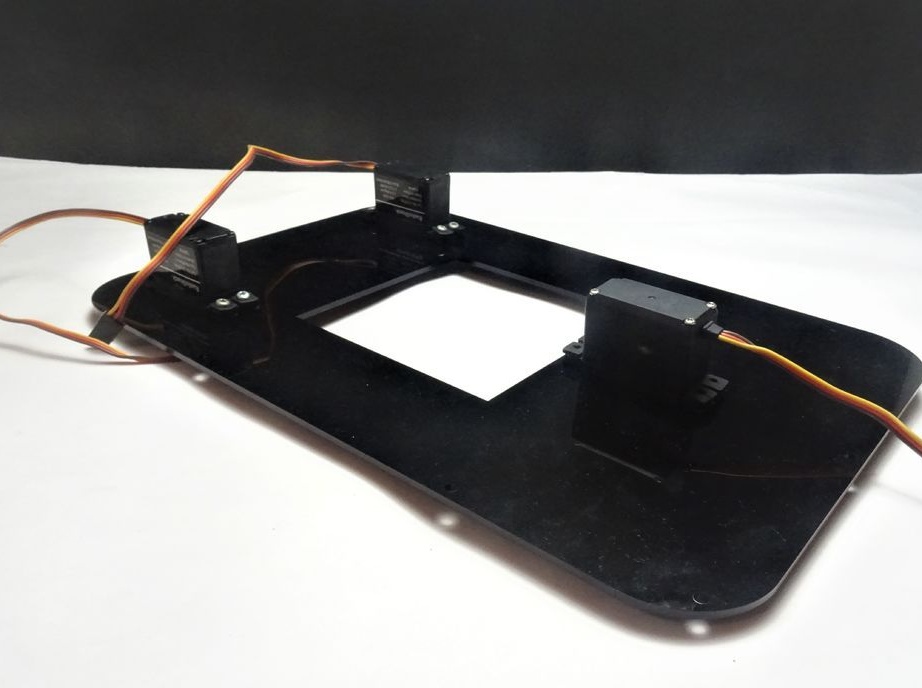
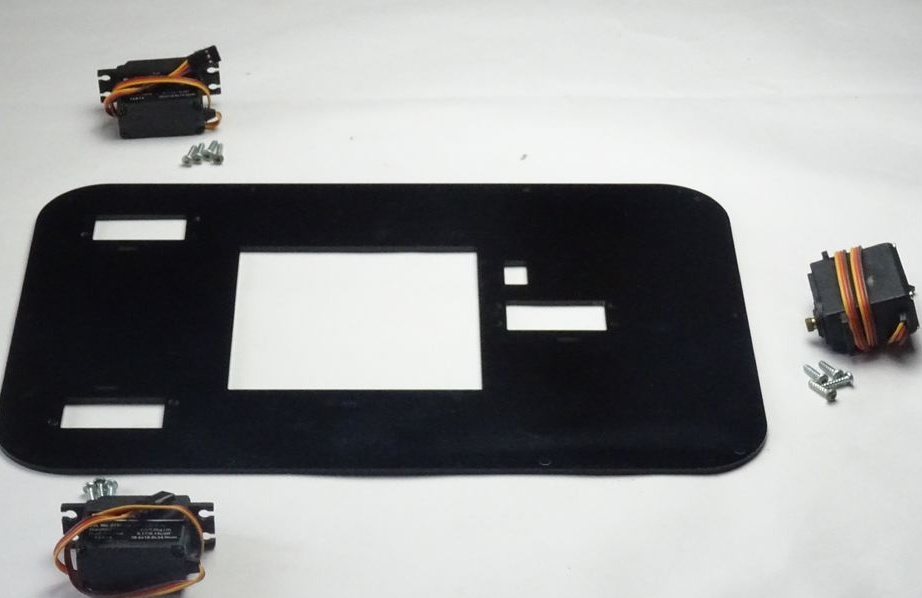
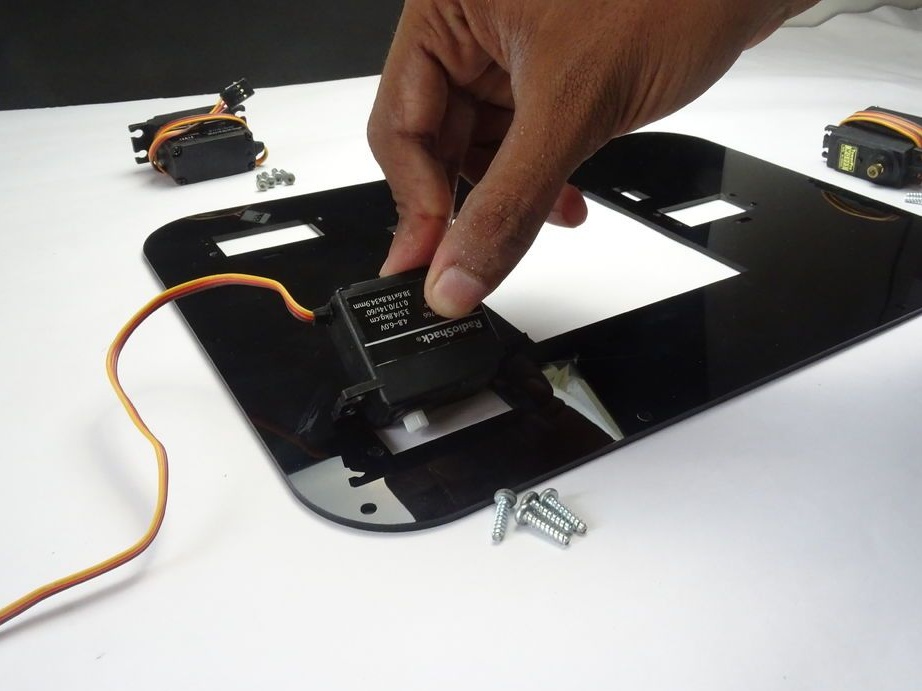
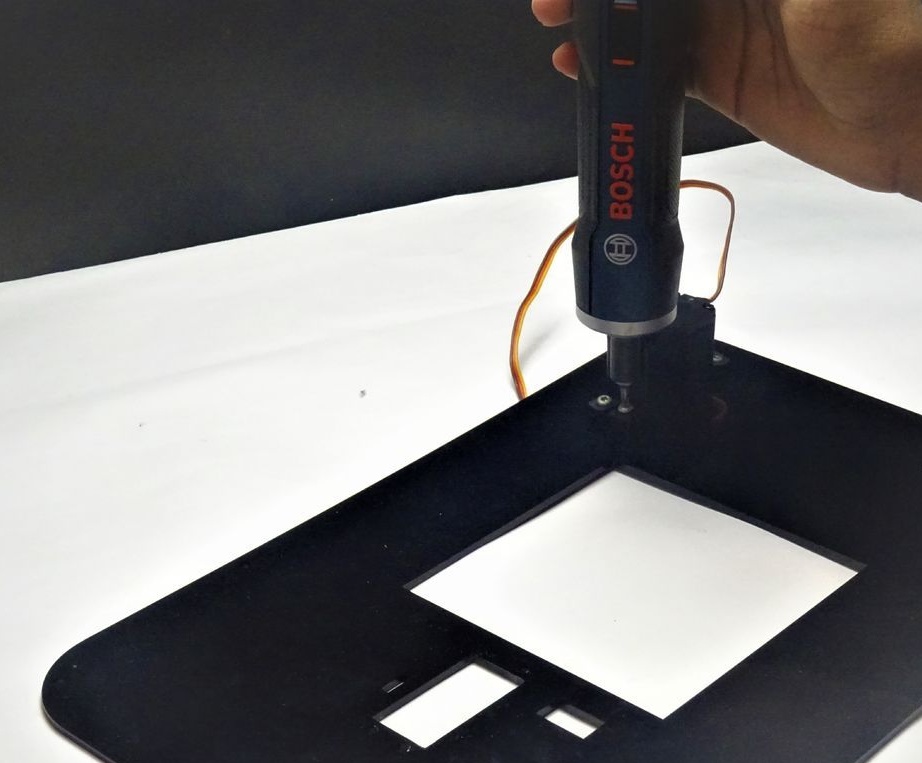
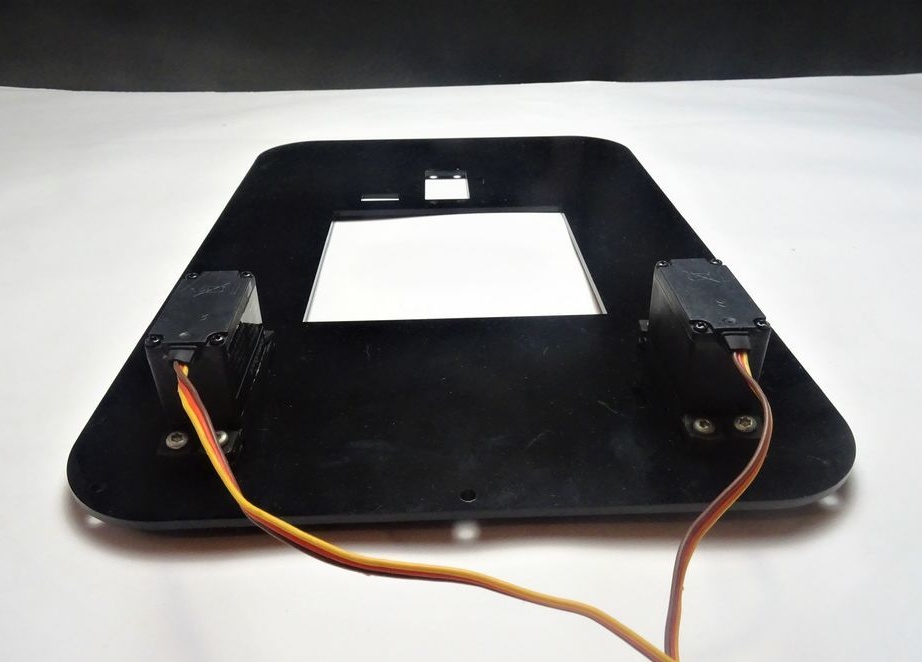
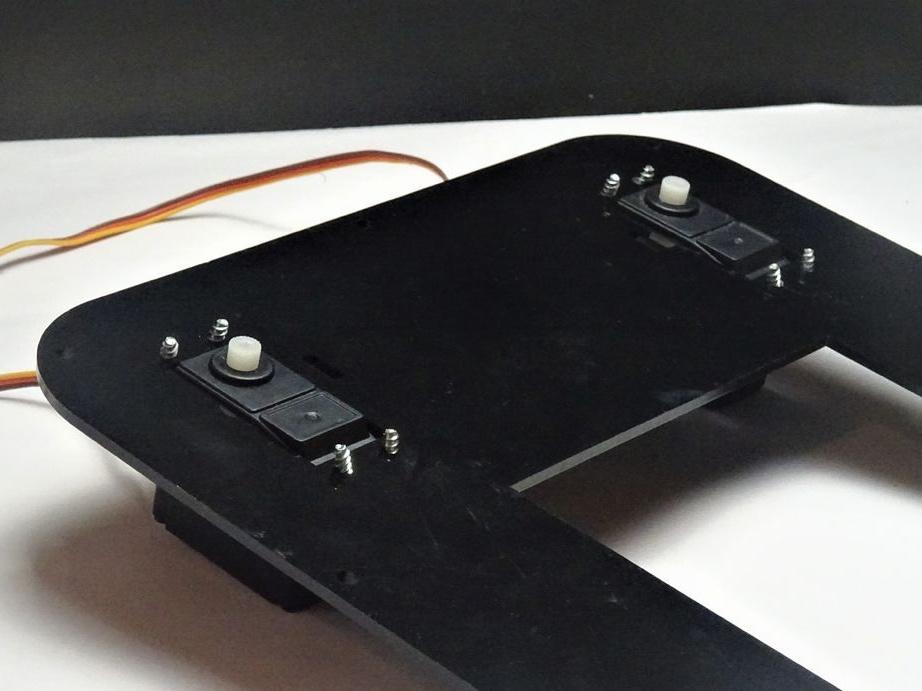
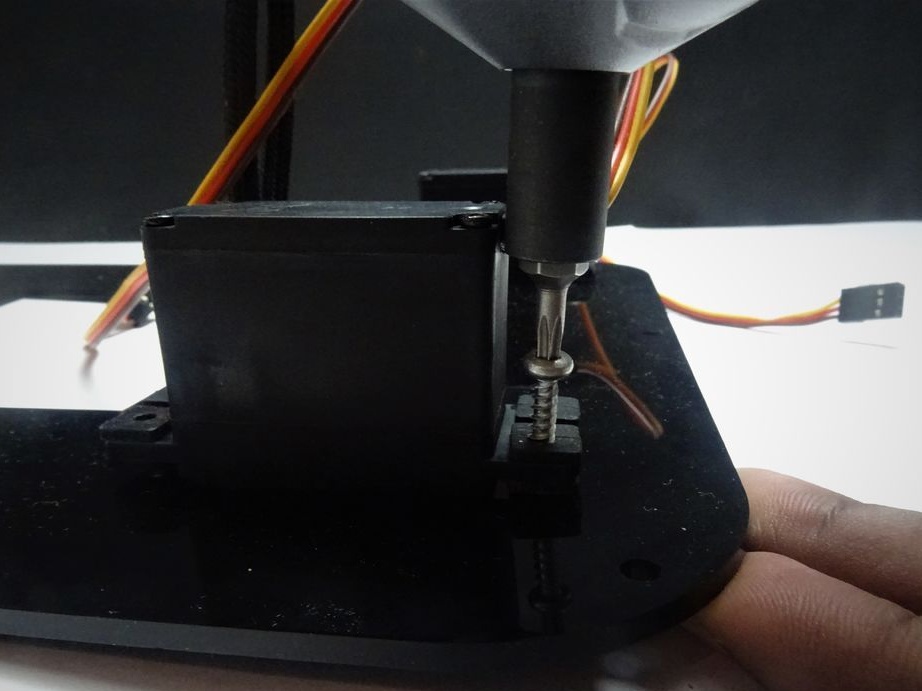
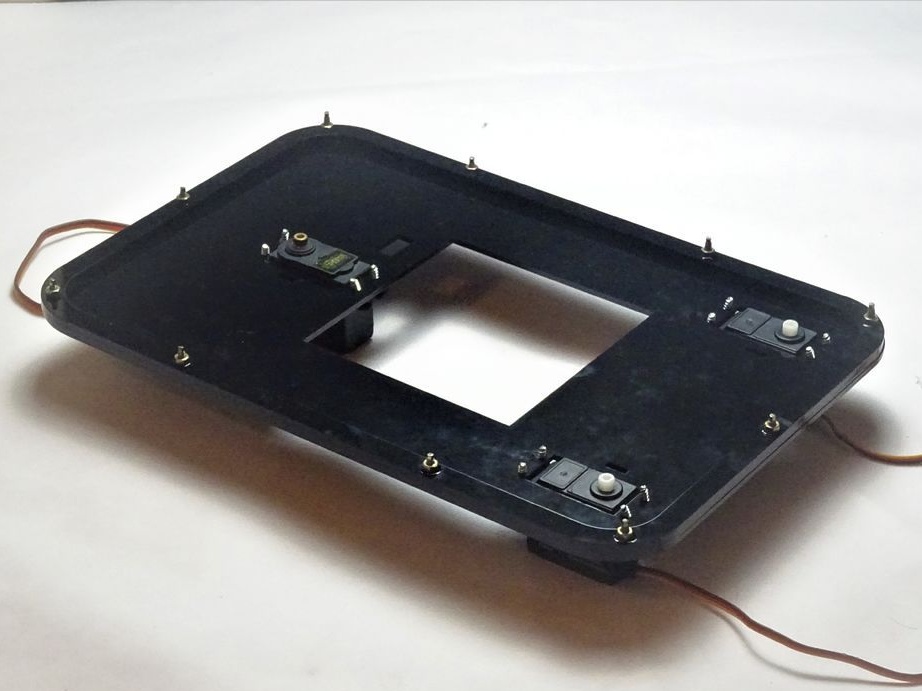
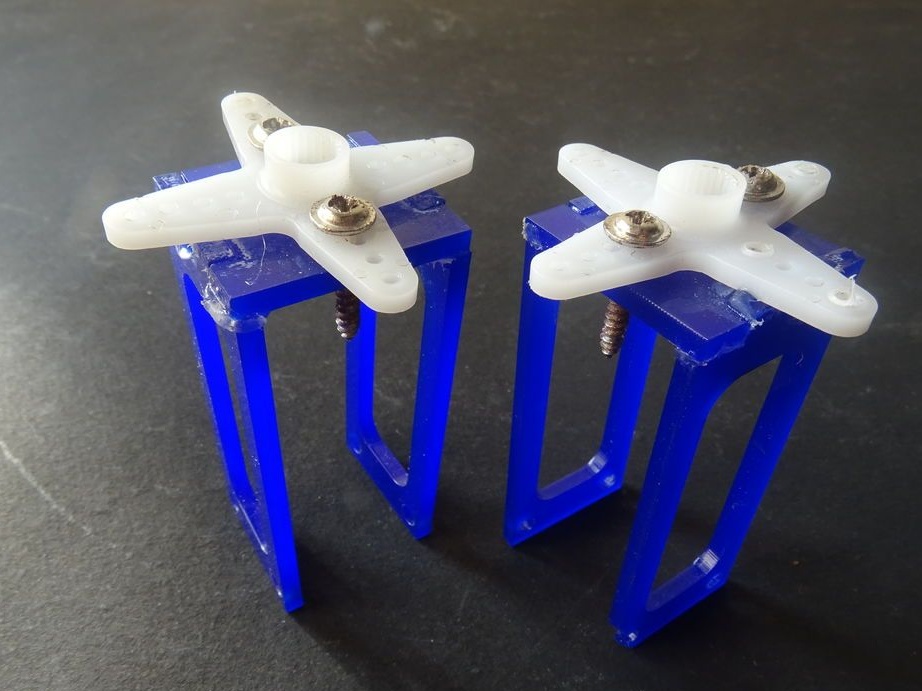
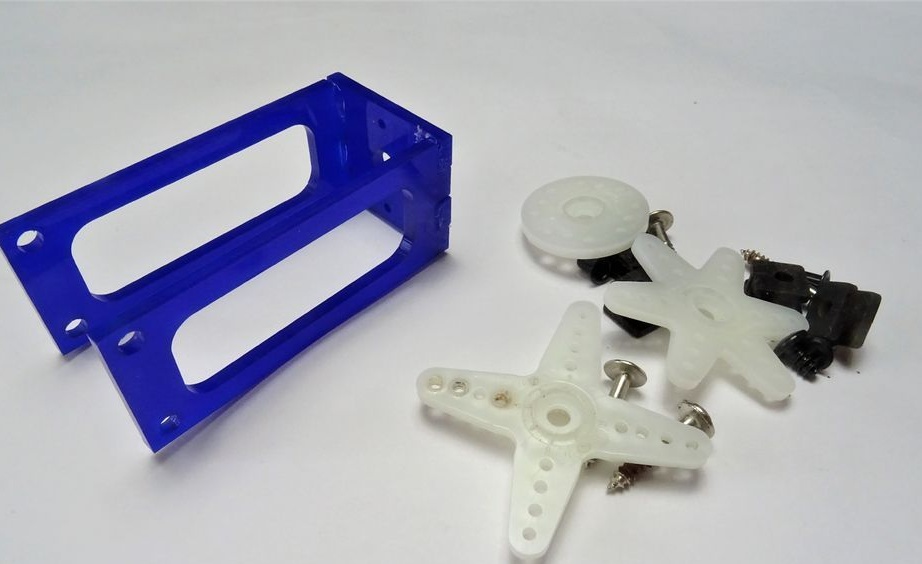
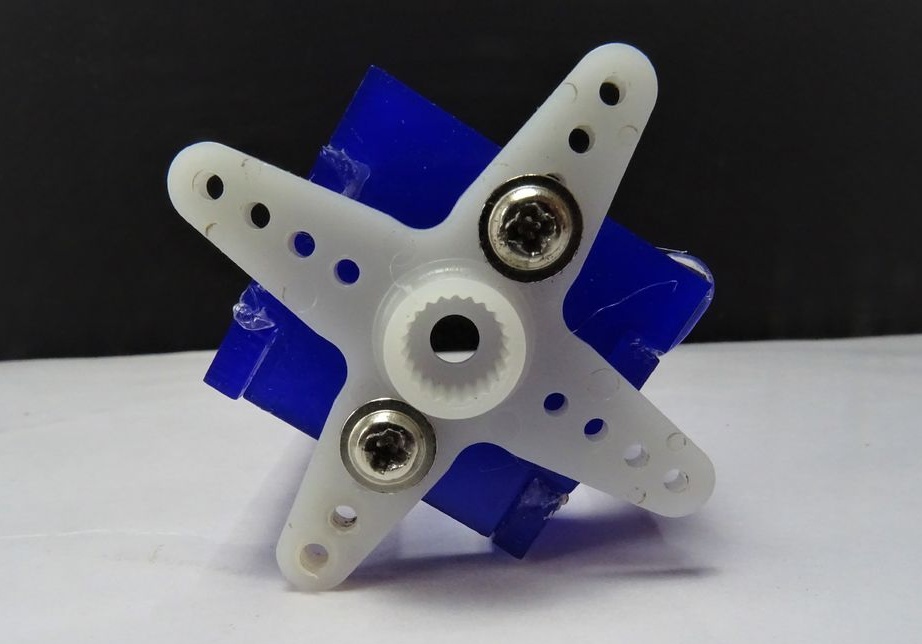
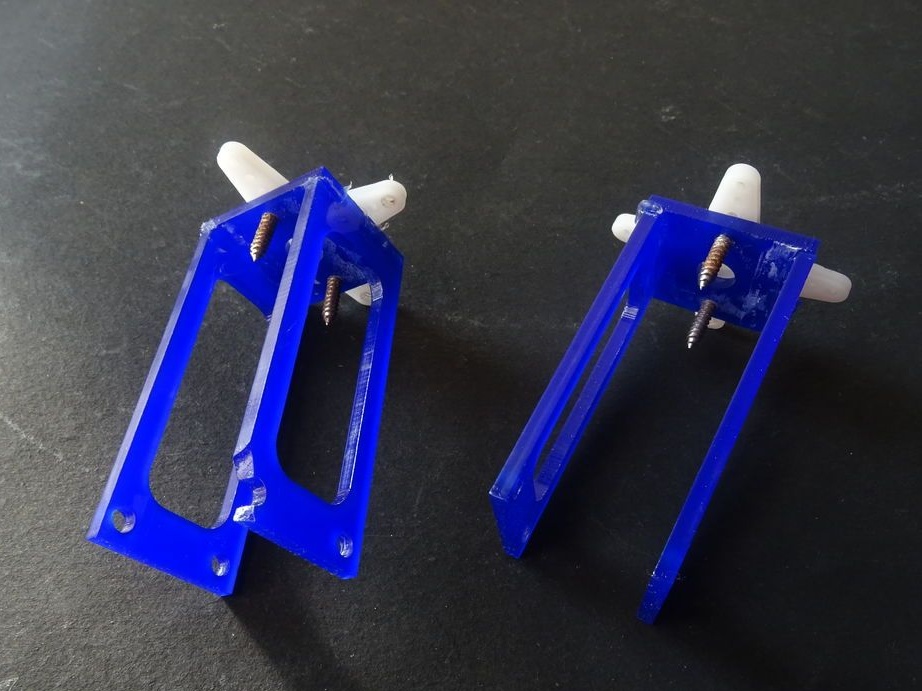
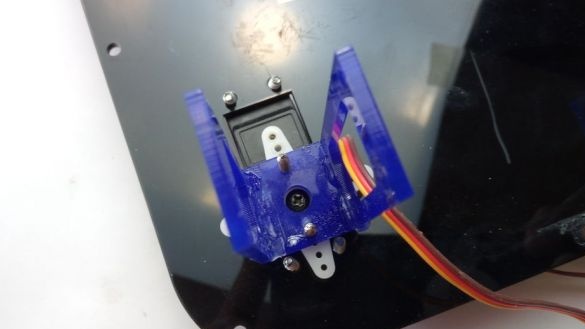
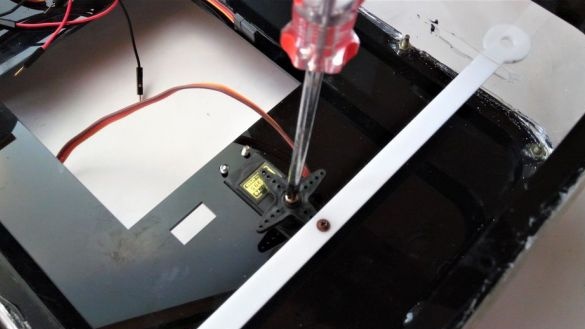
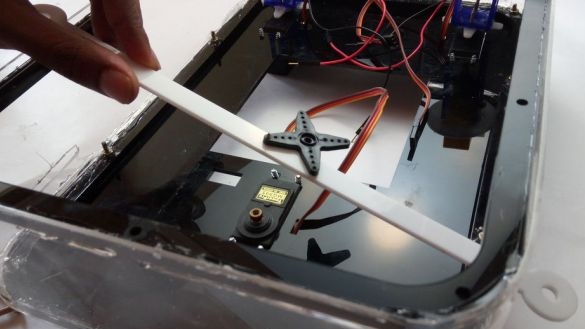
Paso tres: instalar servomotores
Los tres servomotores están atornillados a la plataforma. Dos a la espalda y uno al frente.

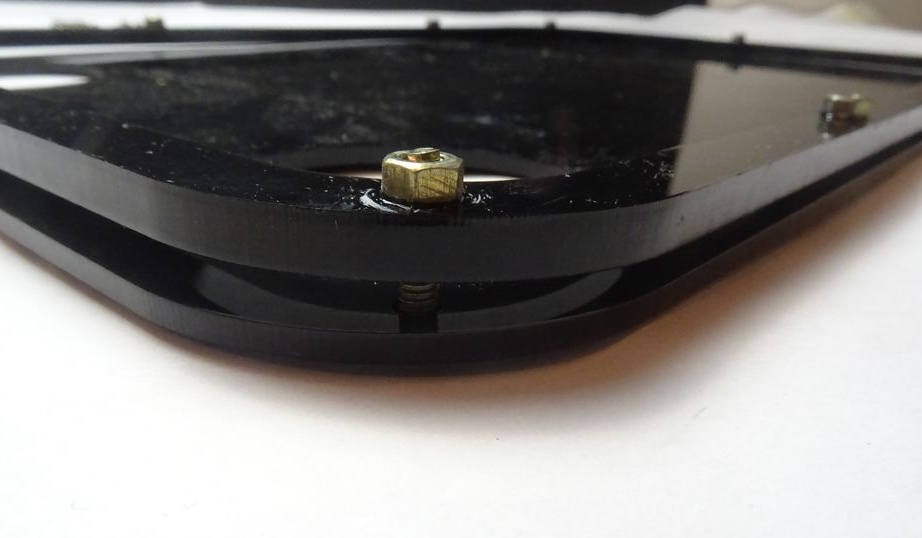
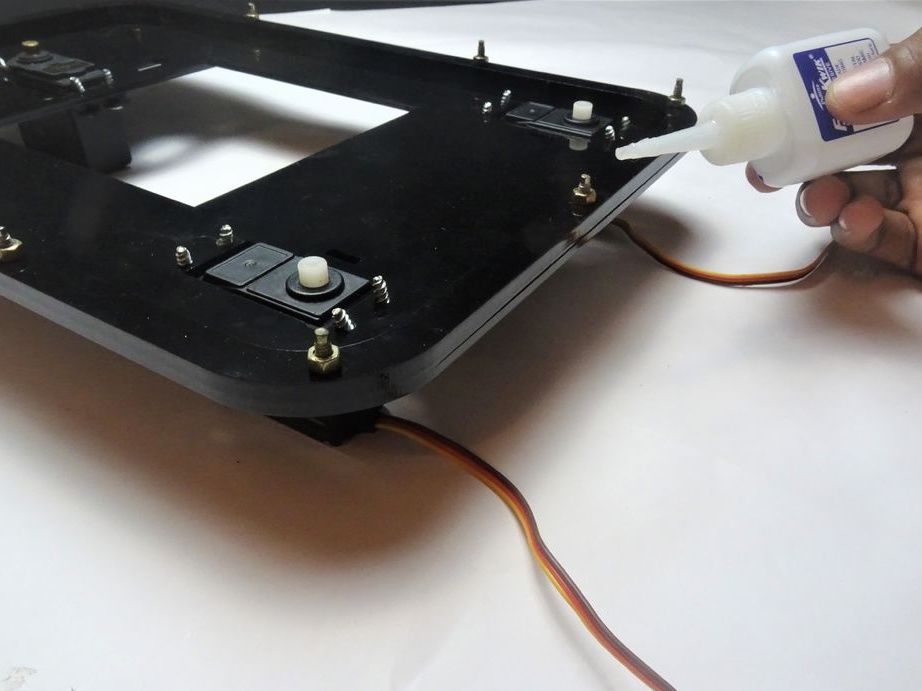
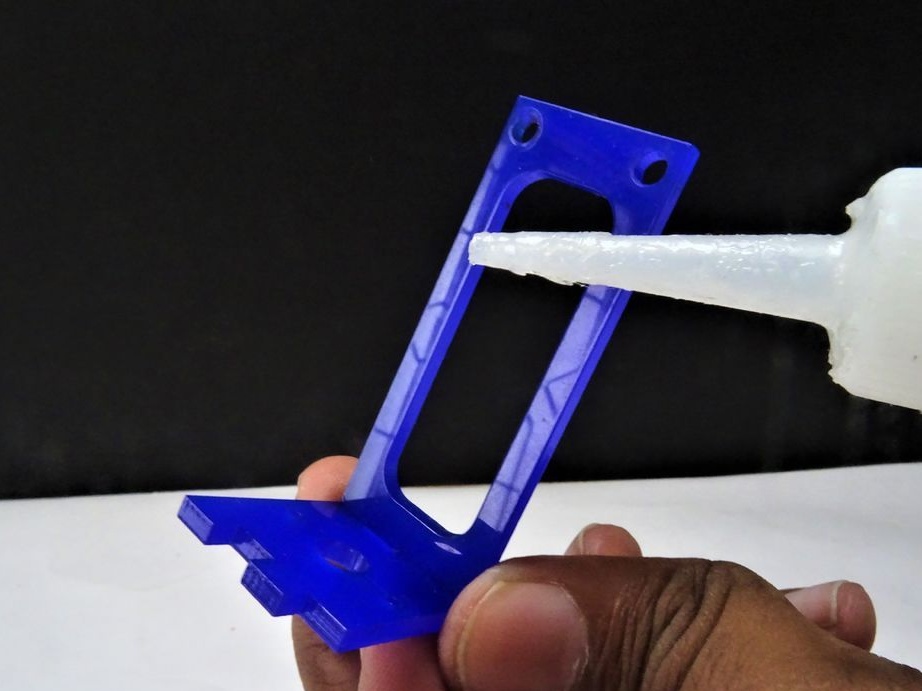
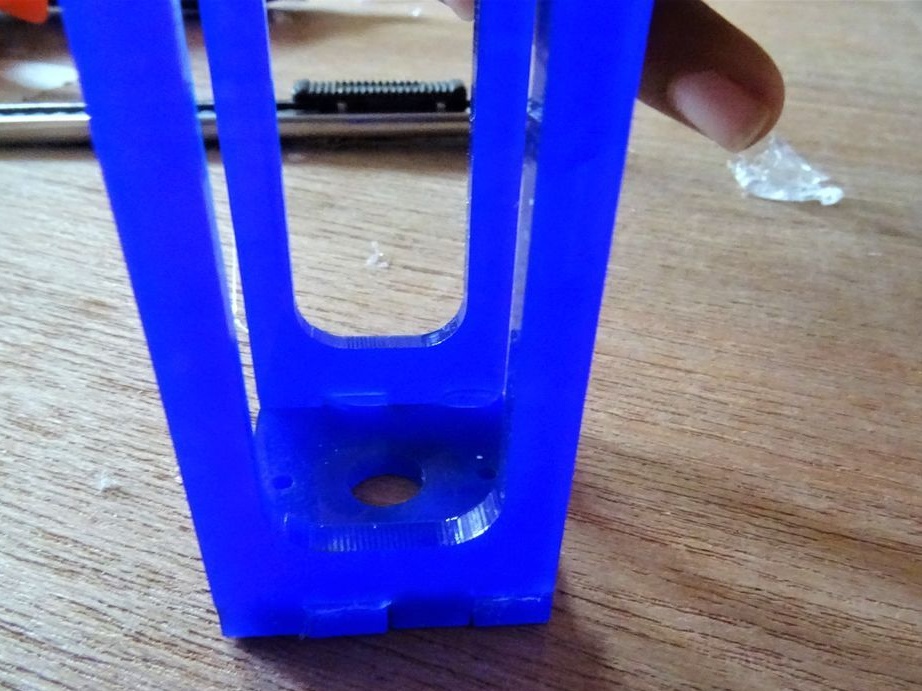
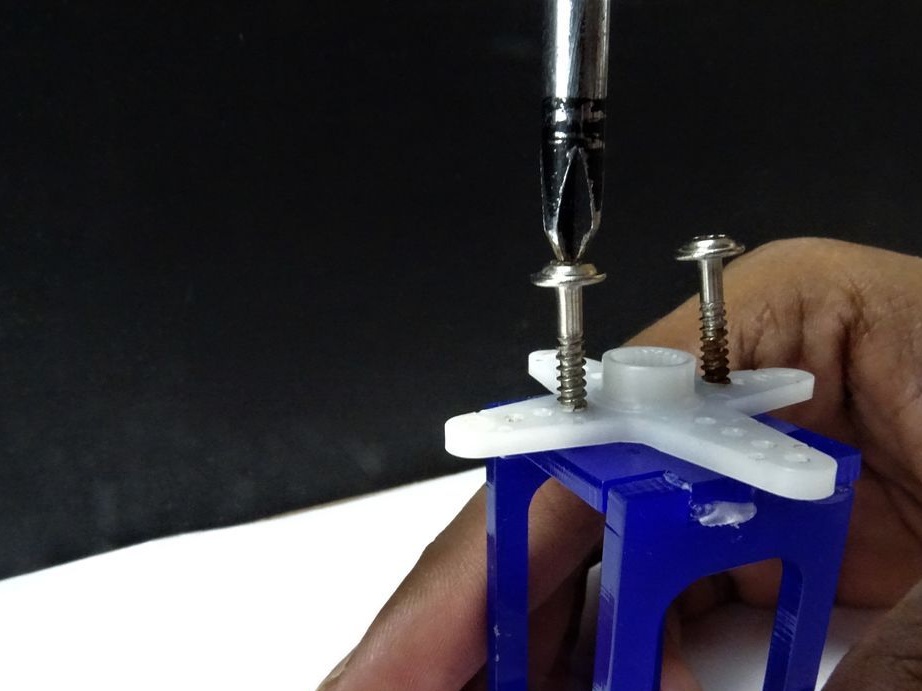
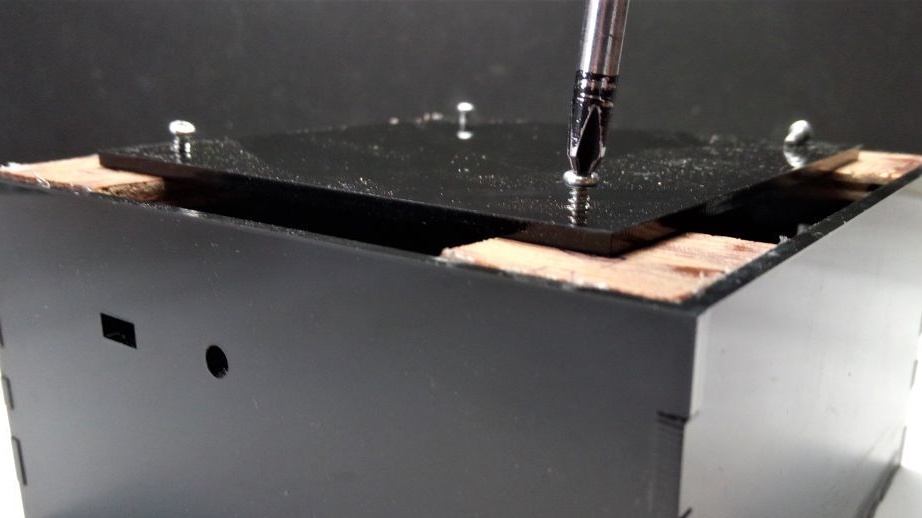
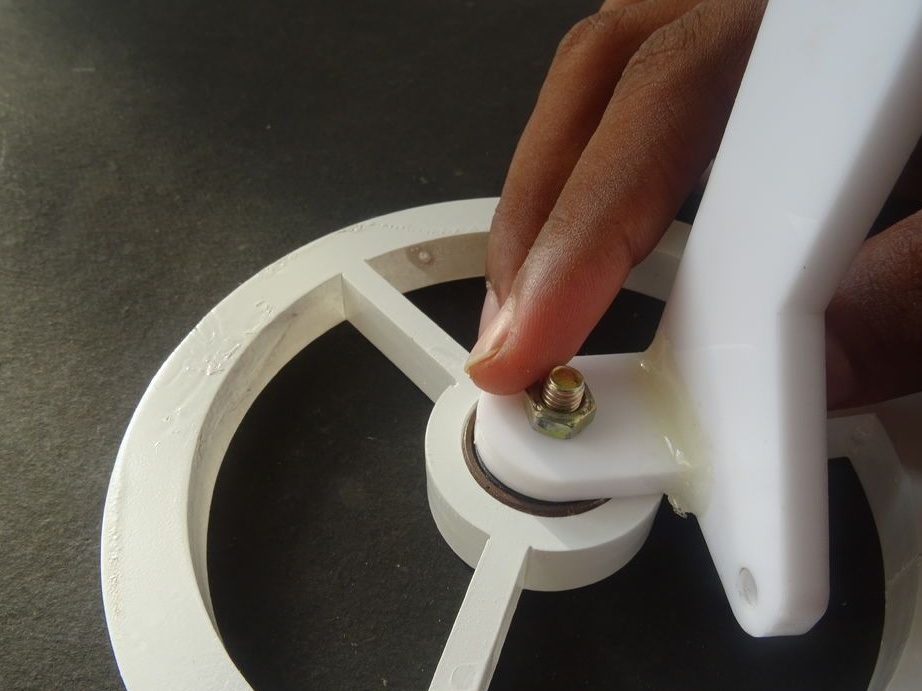
Paso cuatro: nueces
Para acceder a los mecanismos, las partes superior e inferior se atornillan juntas. Pega las tuercas del superpegamento al marco y luego lo refuerza con epoxi.


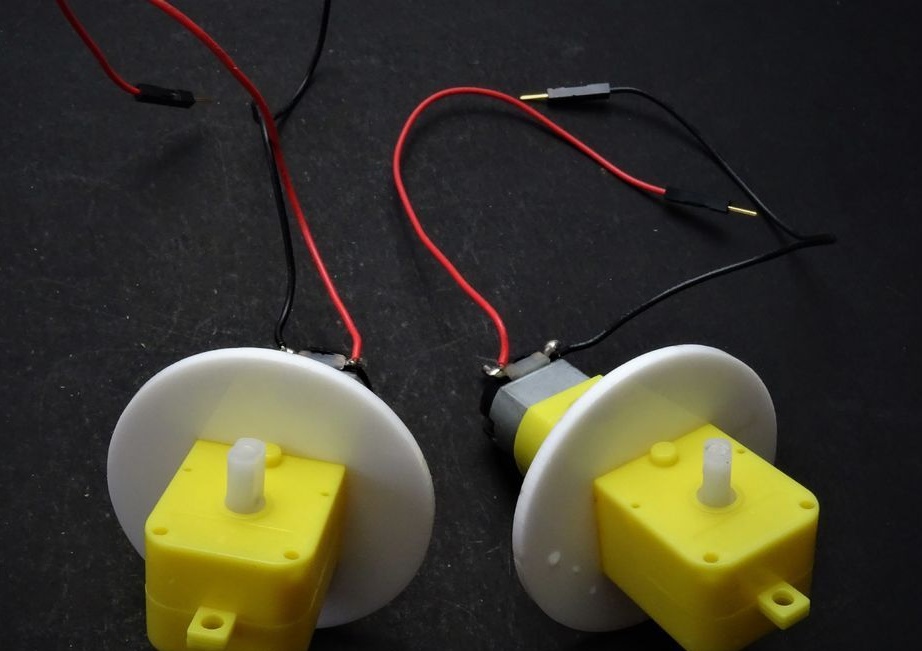
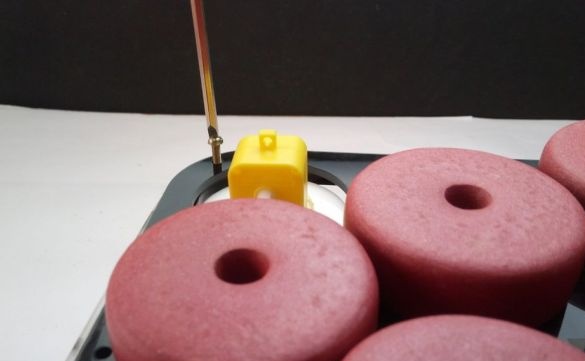
Paso cinco: flotadores
Flotadores de pegamento.



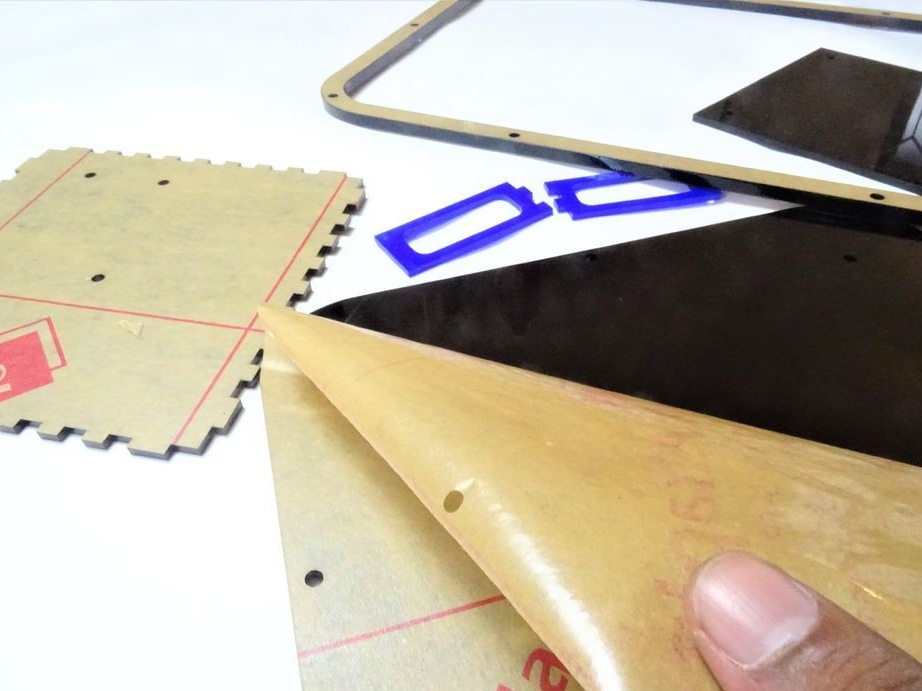
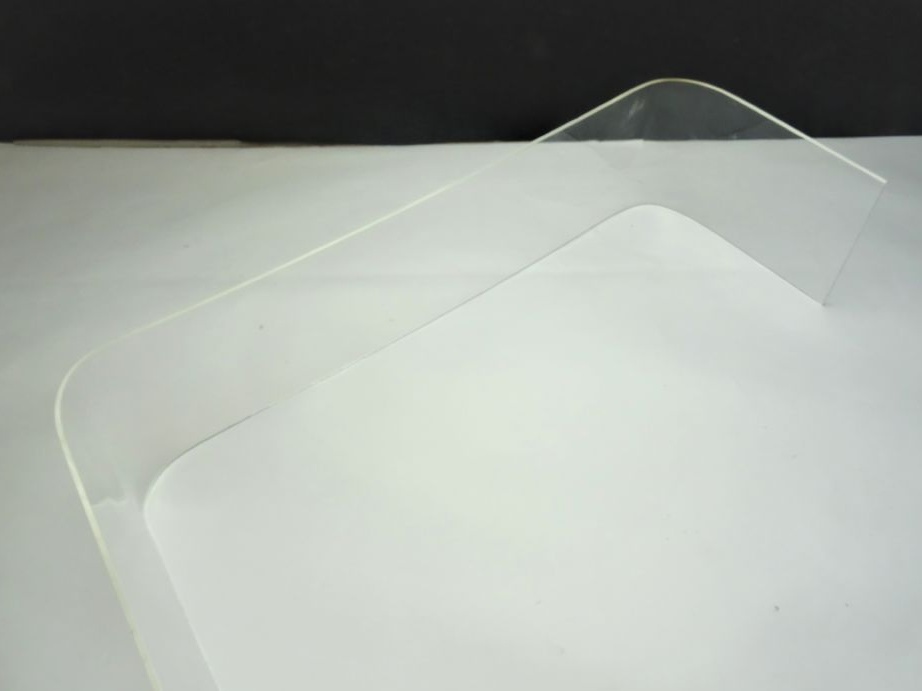
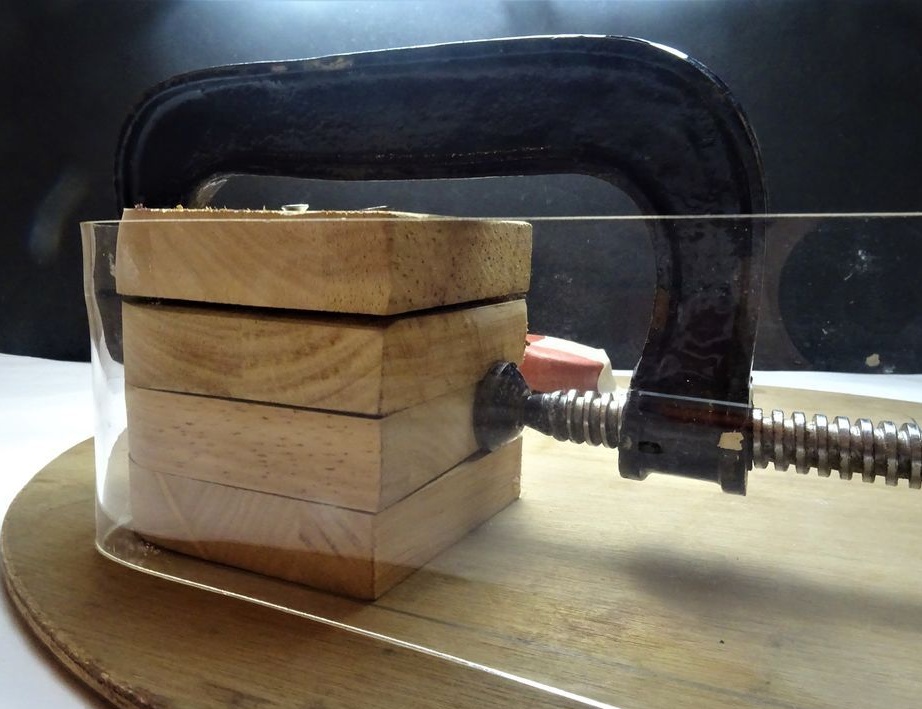
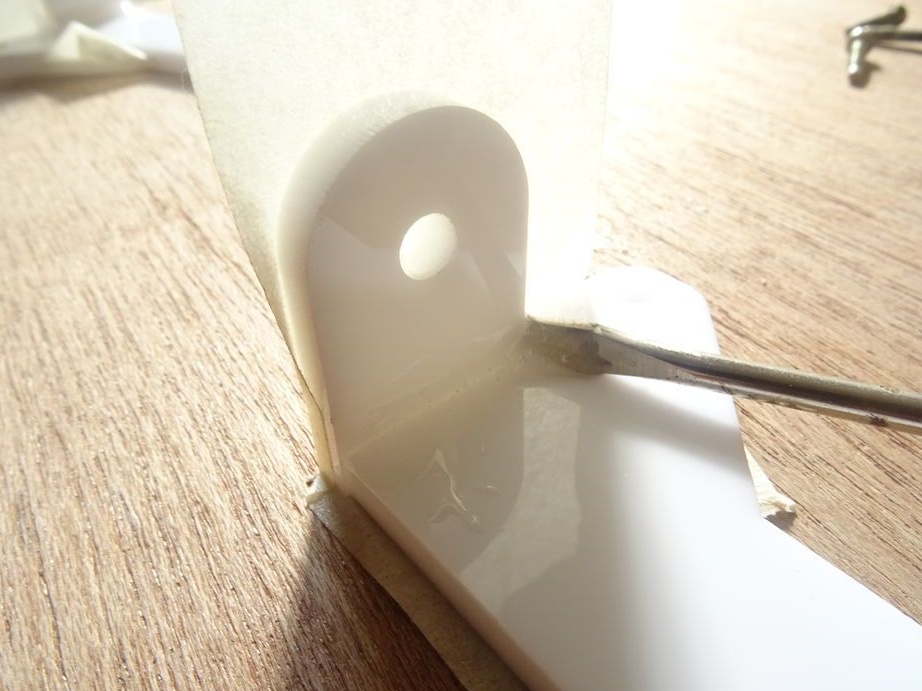
Paso seis: dar forma al acrílico
Para doblar el acrílico, un artesano hace una plantilla de madera.



Sujeta la parte con una abrazadera y, calentándola con un secador de pelo, le da a la parte la forma deseada.





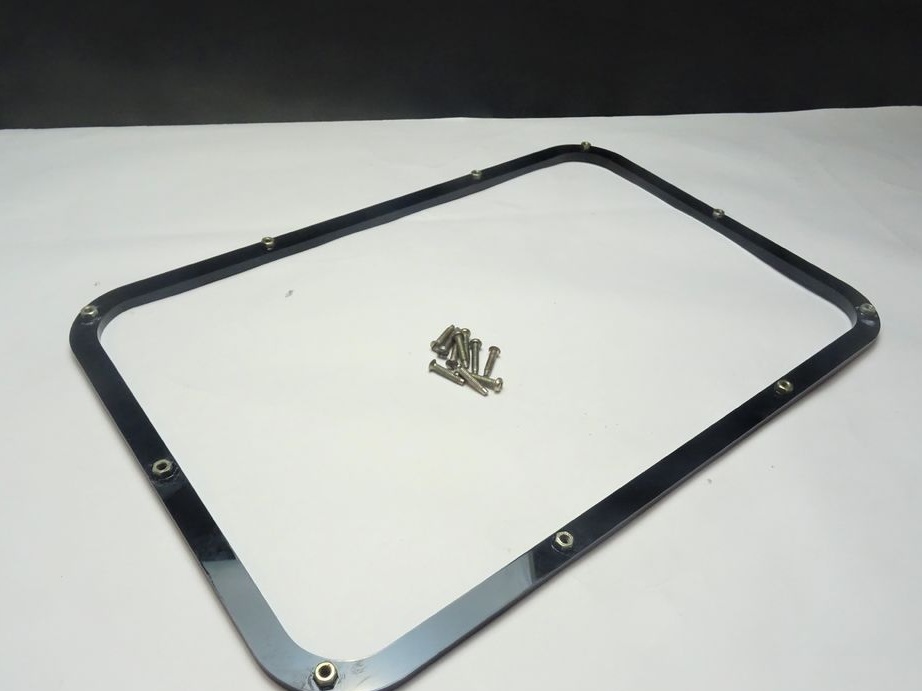
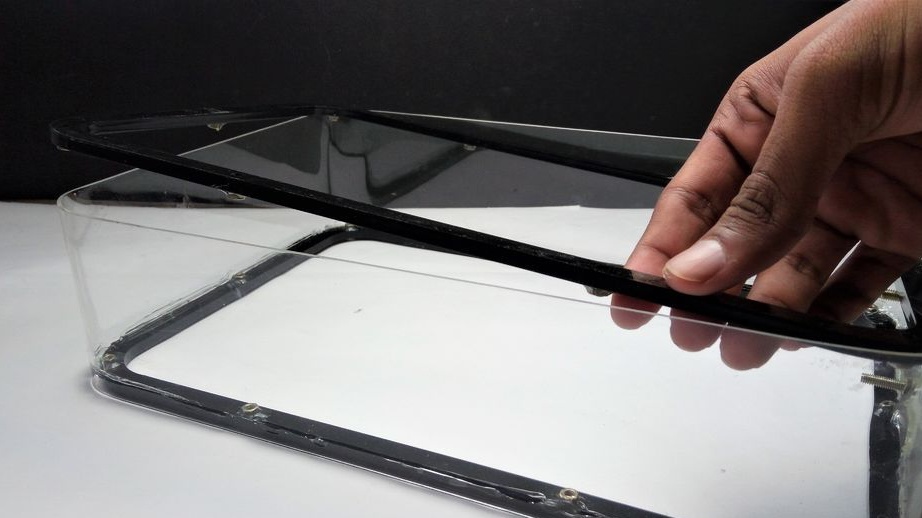
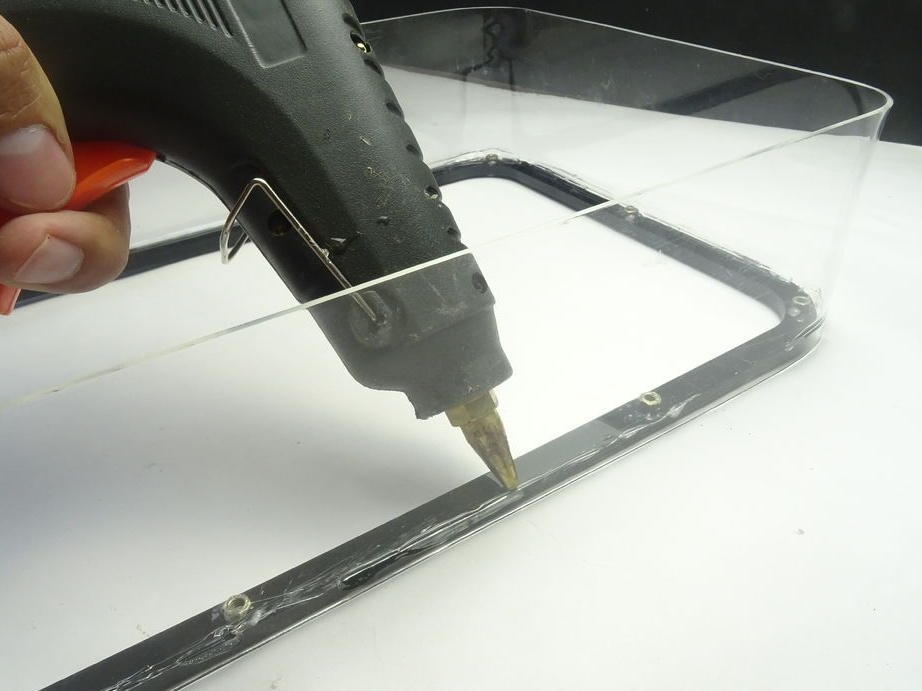
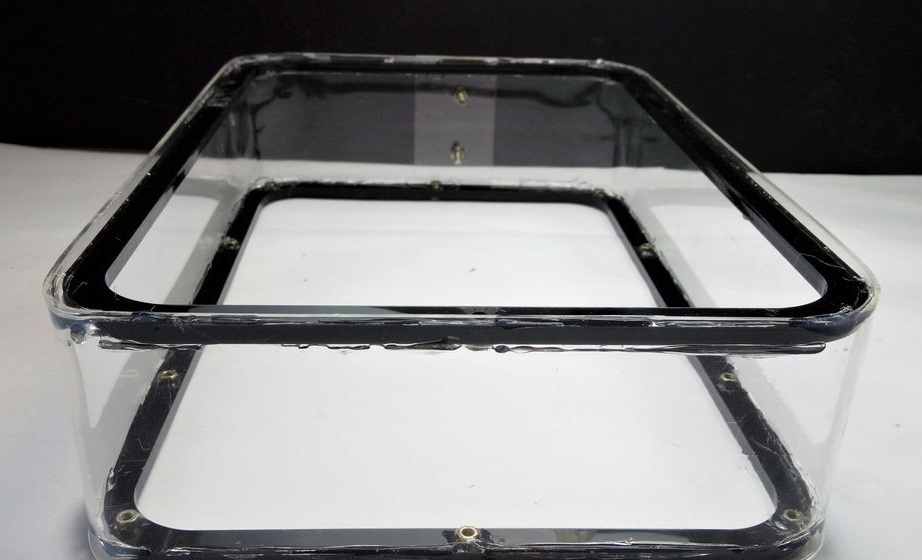
Séptimo paso: marco
Pega los marcos superior e inferior al cuerpo transparente. Las costuras se sellan cuidadosamente con pegamento caliente.







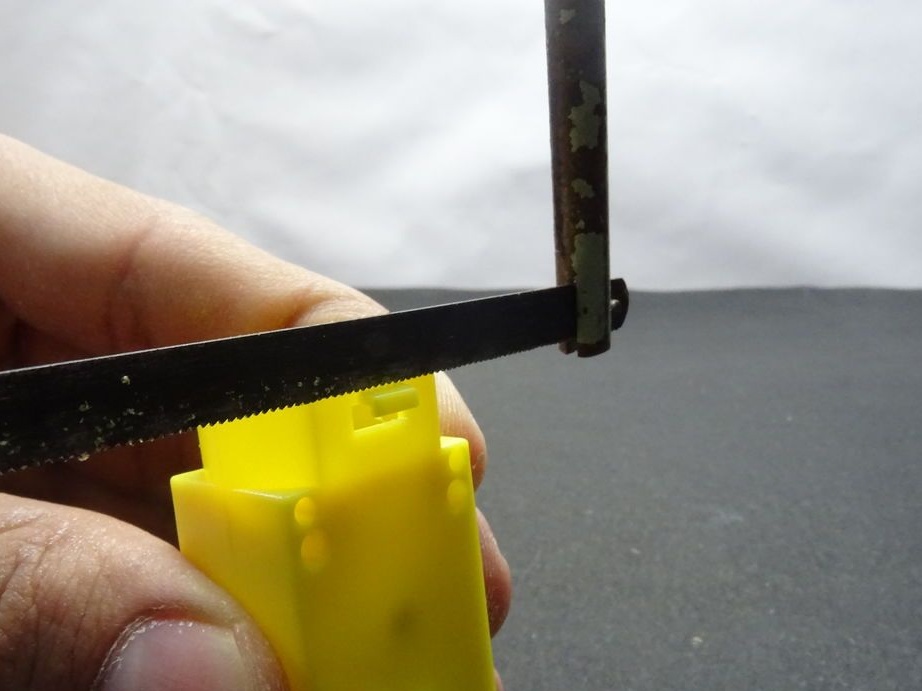
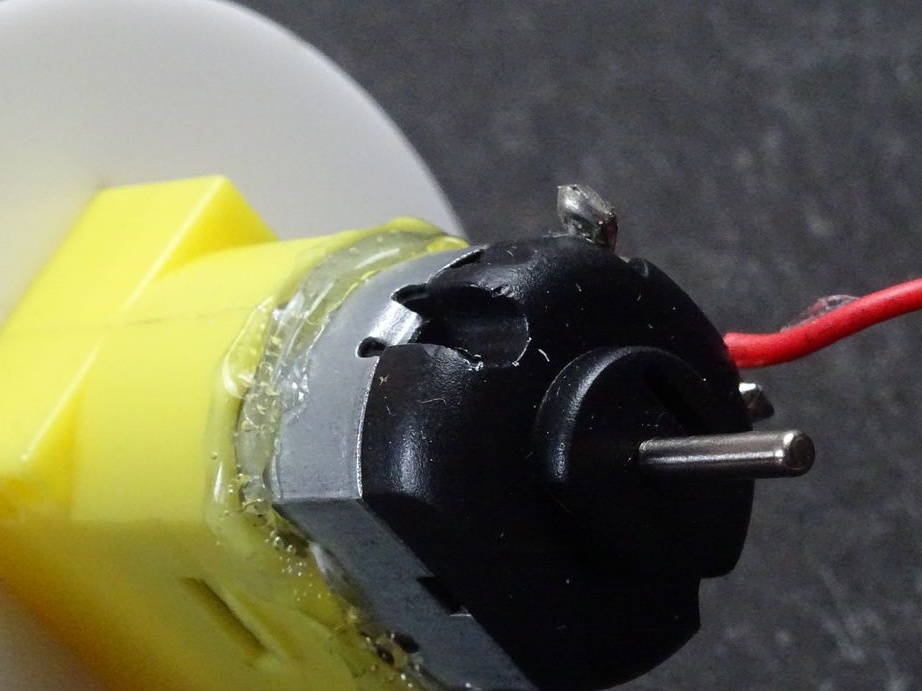
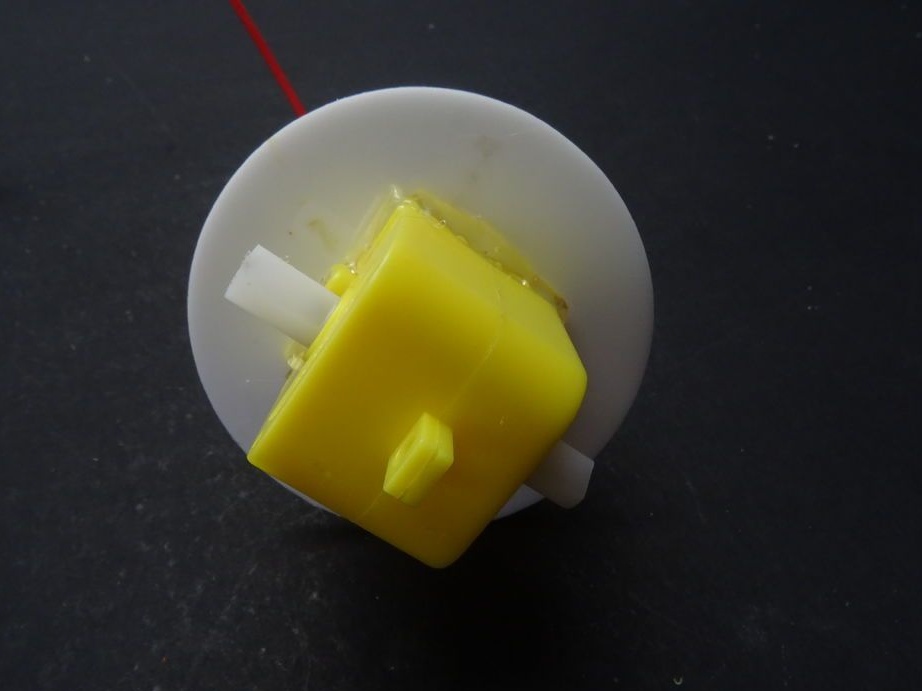
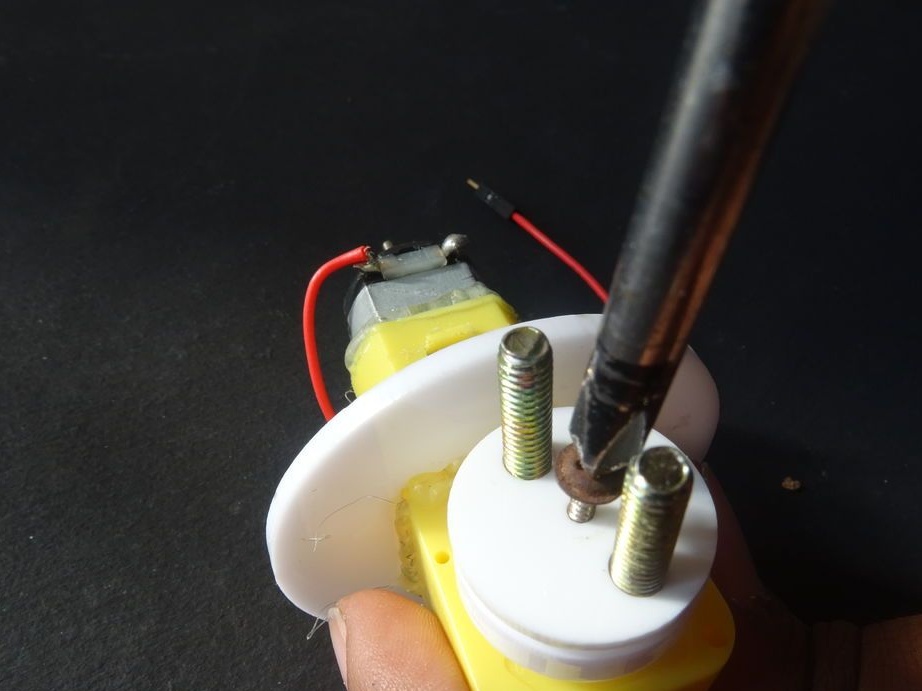
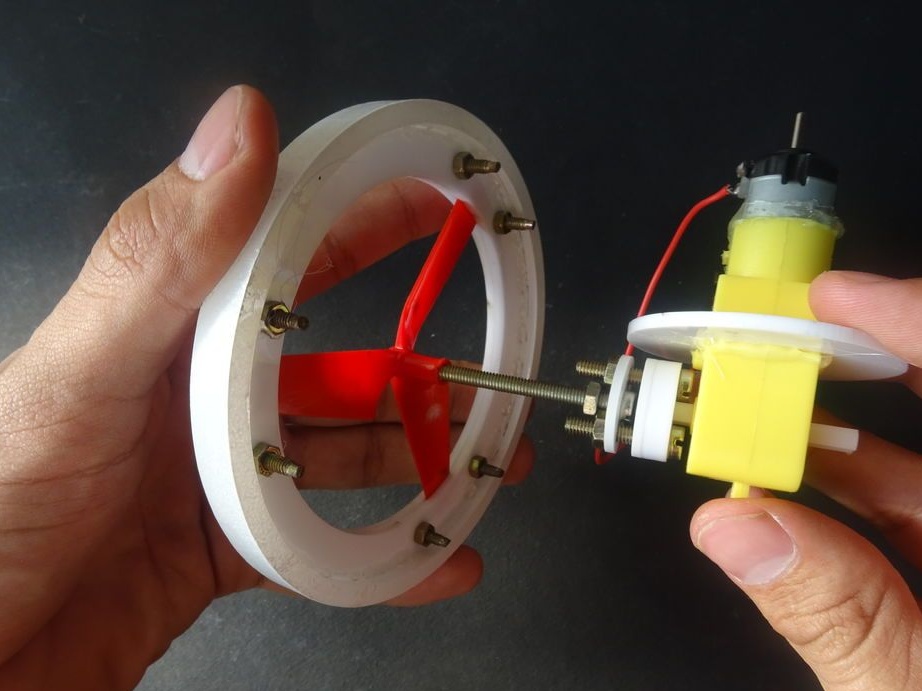
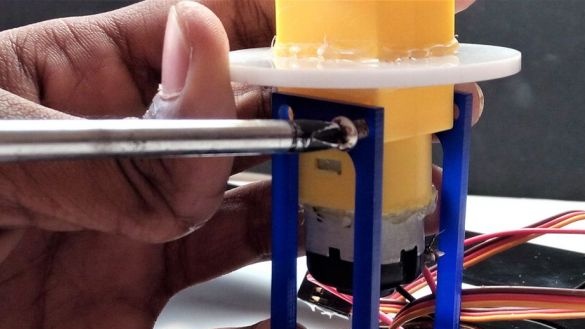
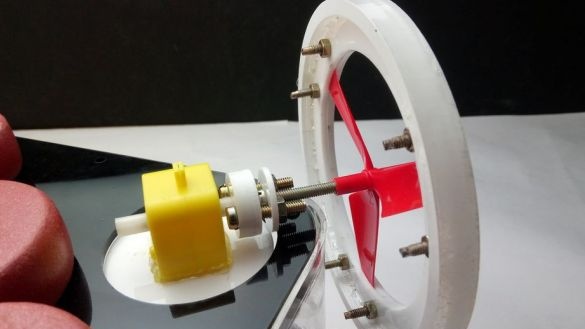
Paso ocho: ajuste del motor
Ahora necesita procesar la carcasa del motor para instalar piezas en ella.
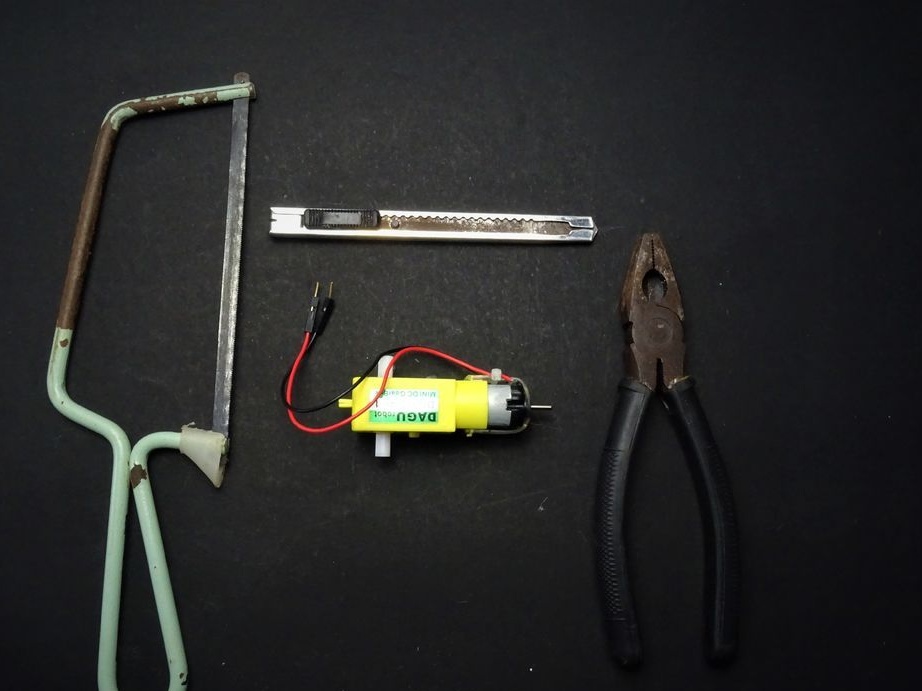
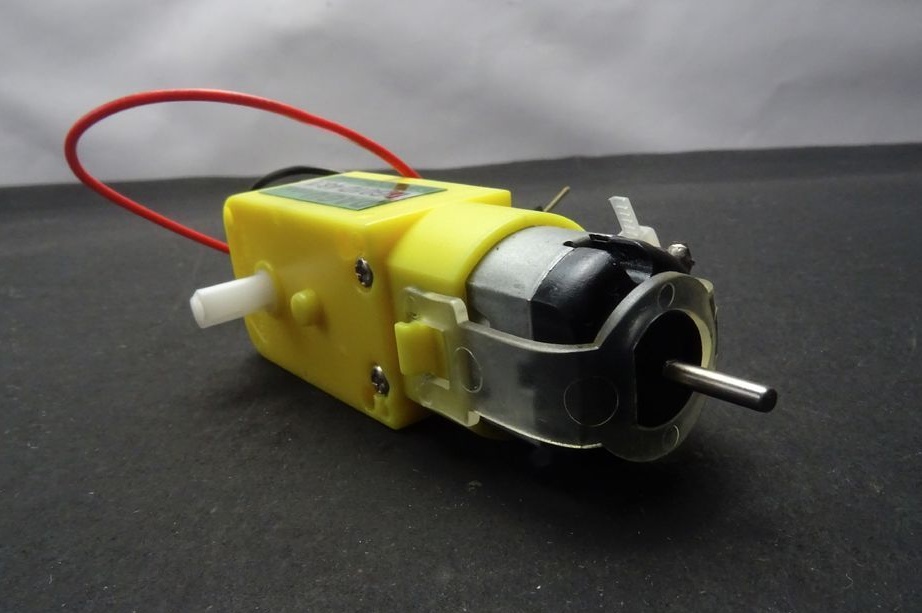
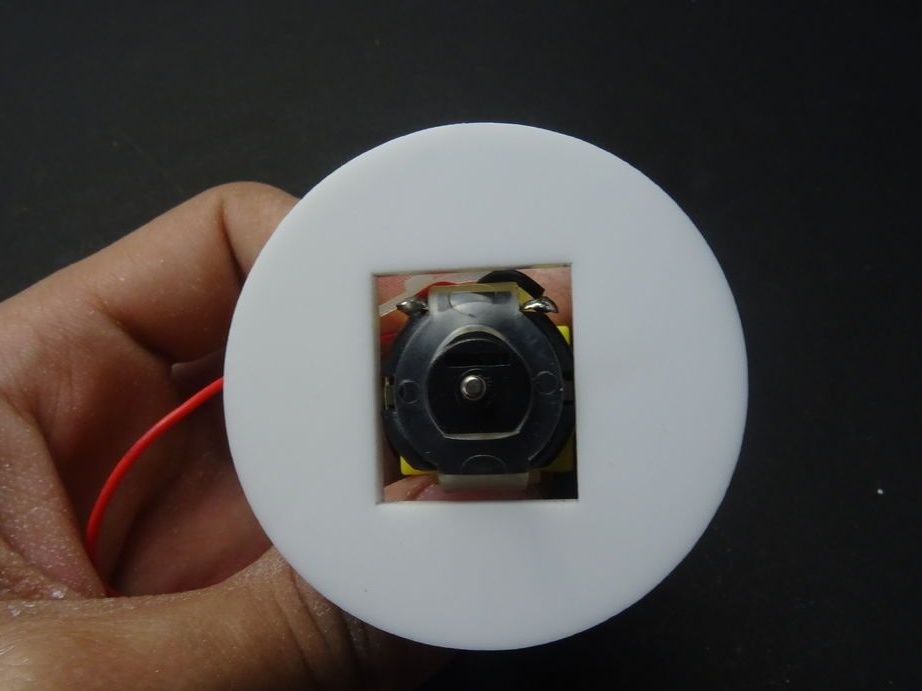
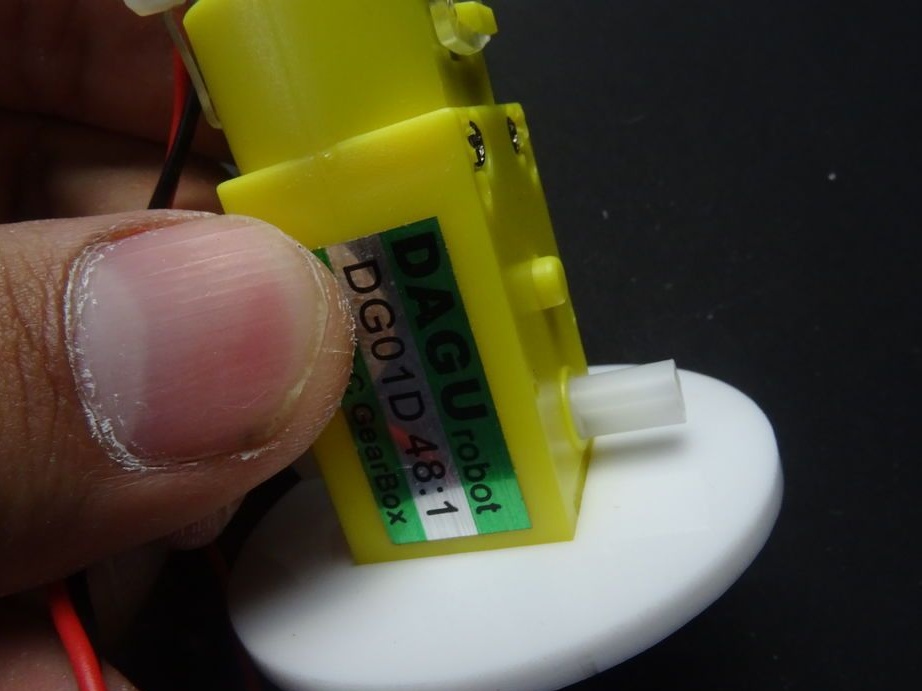

Corta todas las partes sobresalientes del cuerpo, hasta la pegatina.
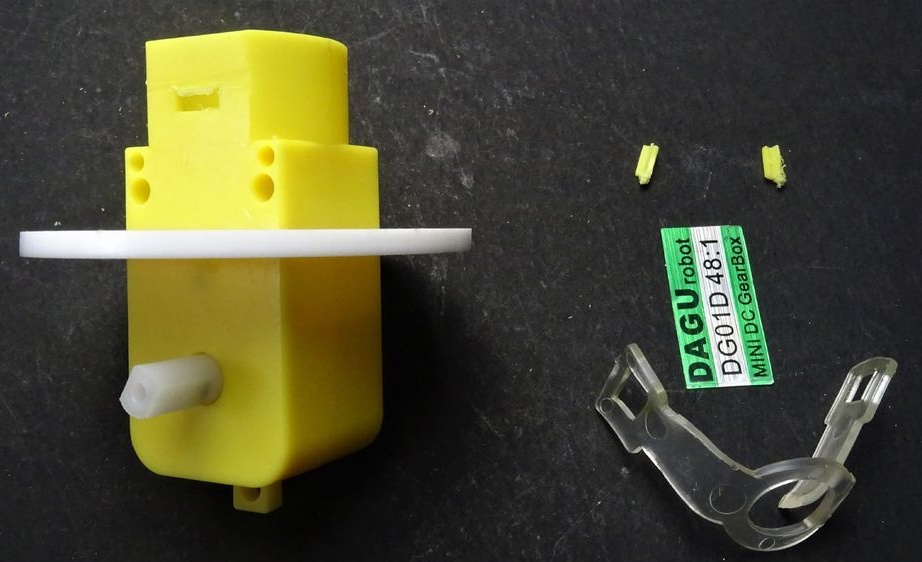

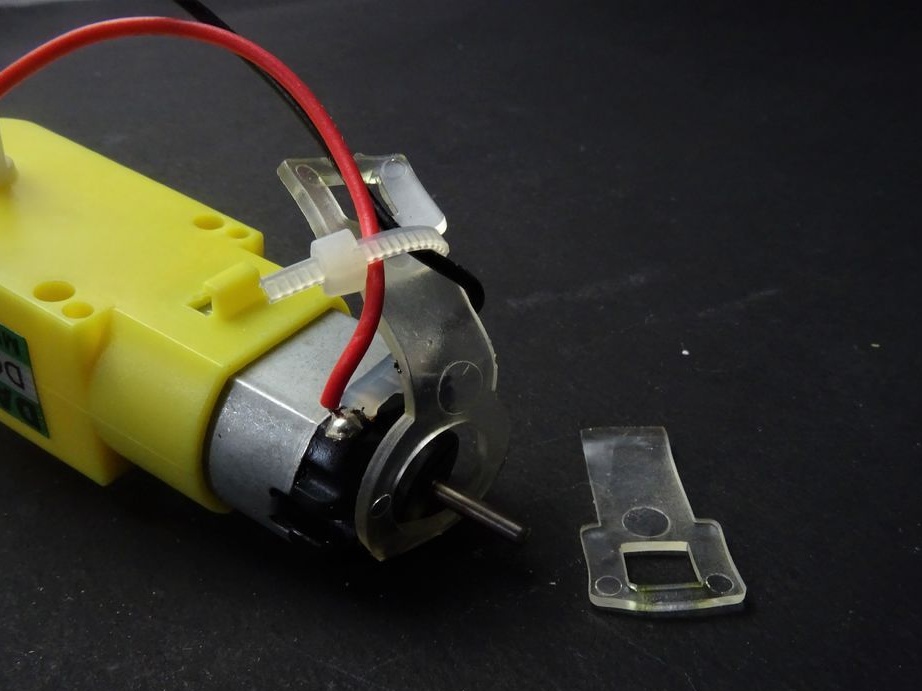


Instala la parte en el cuerpo y la pega. Como era necesario cortar el soporte del motor (pestillos), el motor también se fija con pegamento.


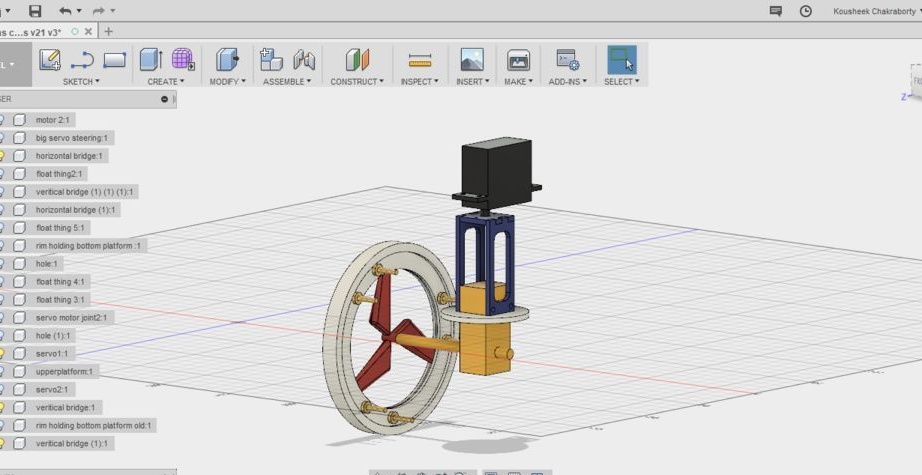
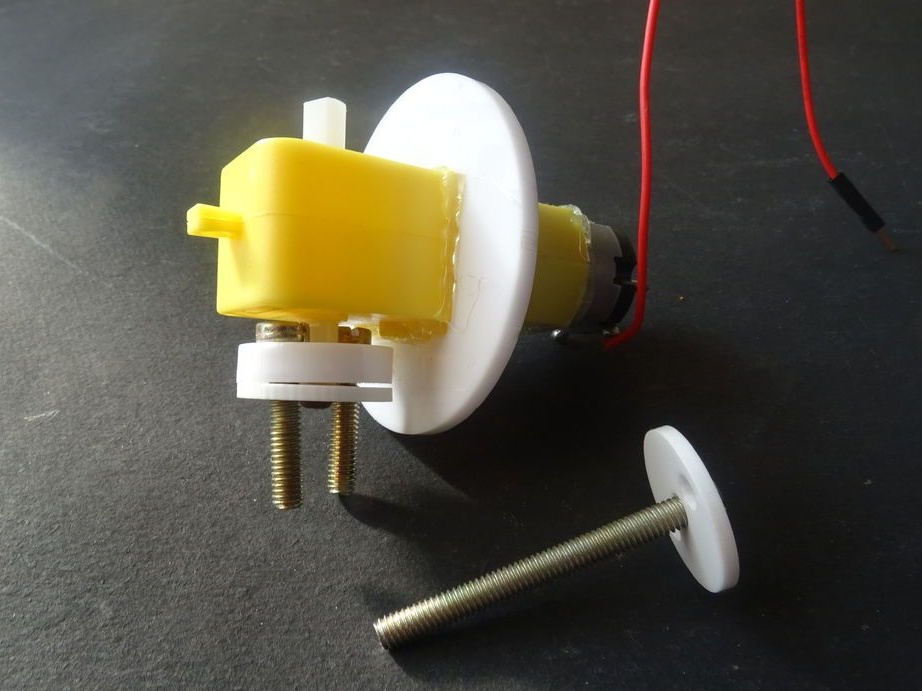
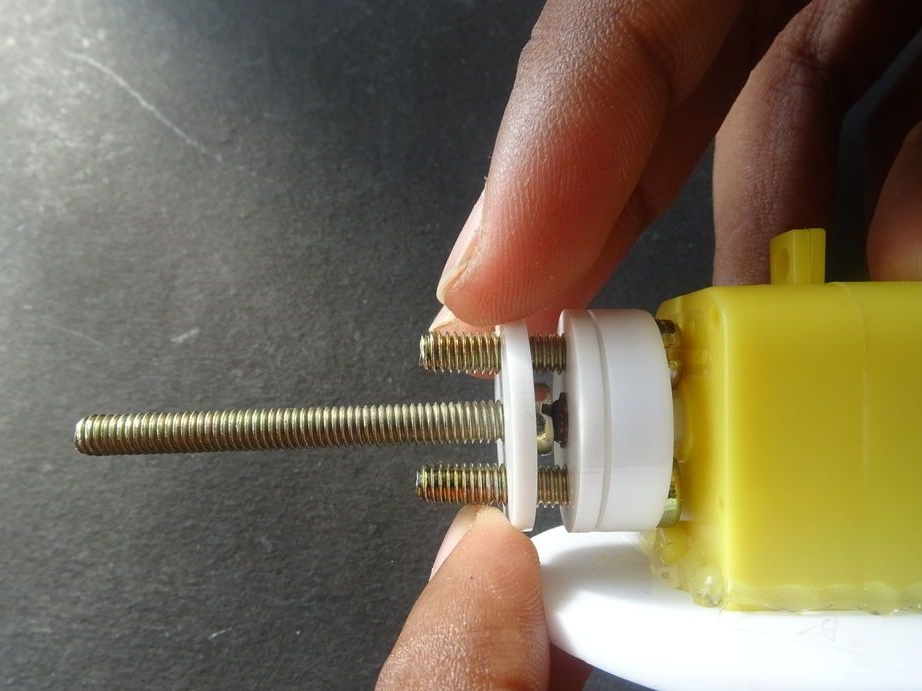
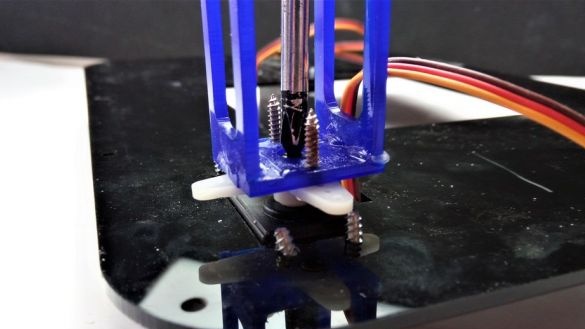
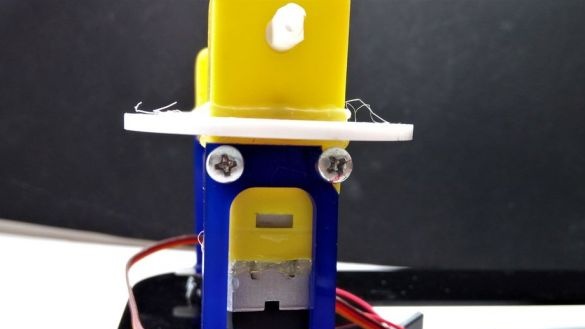
Paso Nueve: Mecanismo Giratorio
Ensambla una carcasa giratoria. Se instalará un motor y se conectará al servoaccionamiento.
Pega el caso.

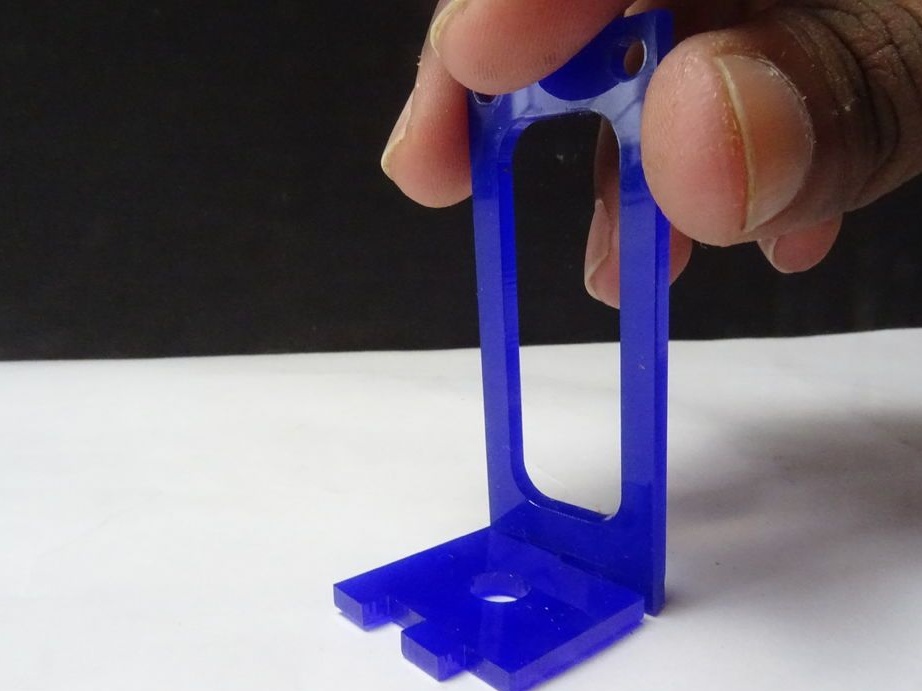

Tornillos en el acoplador.


Paso diez: pintura
Como el maestro no tenía acrílico blanco del grosor requerido, las ruedas y la llanta se cortaron de acrílico transparente y luego se pintaron de blanco.




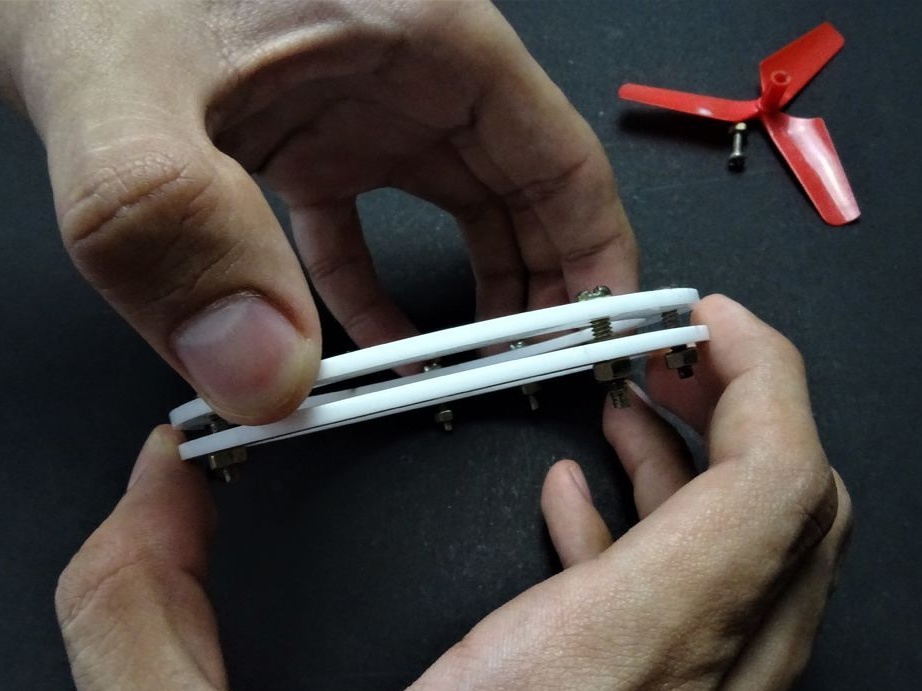
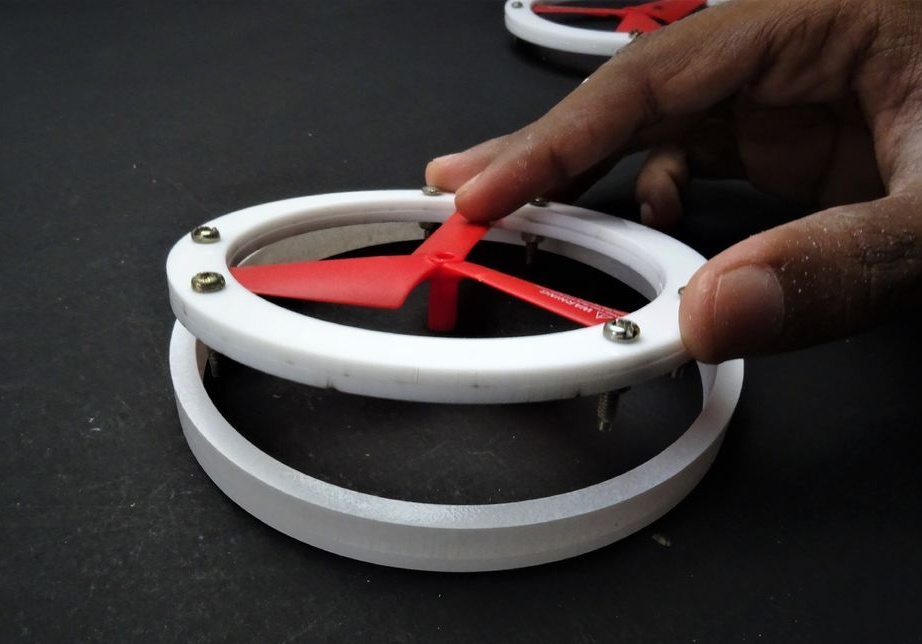
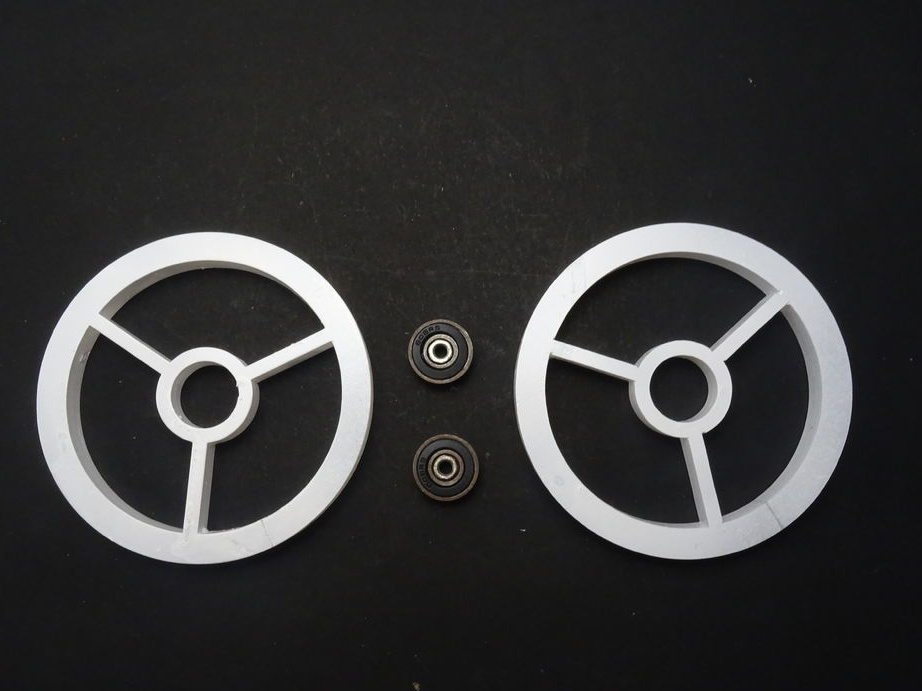
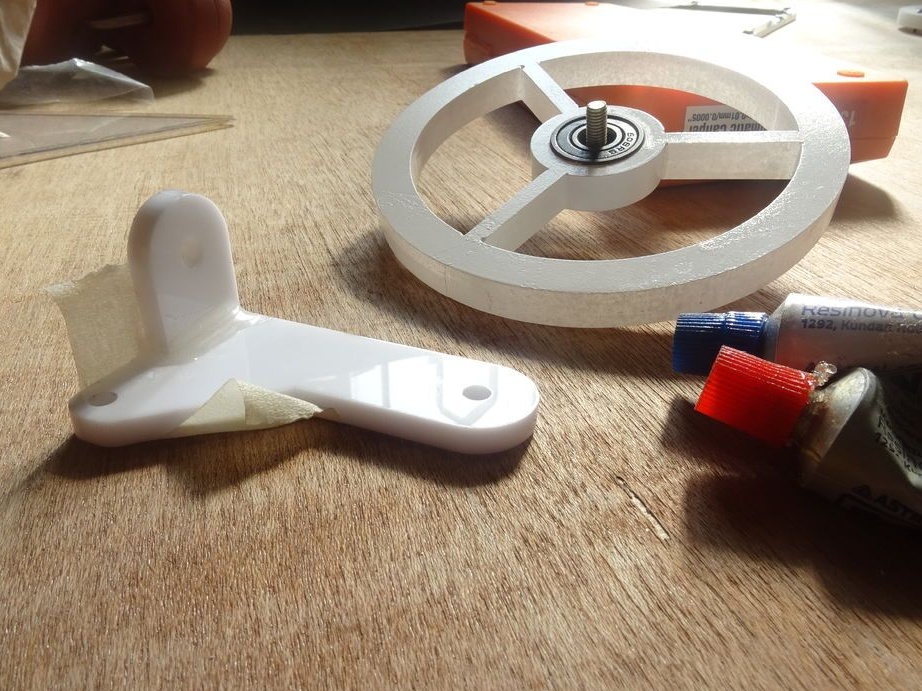
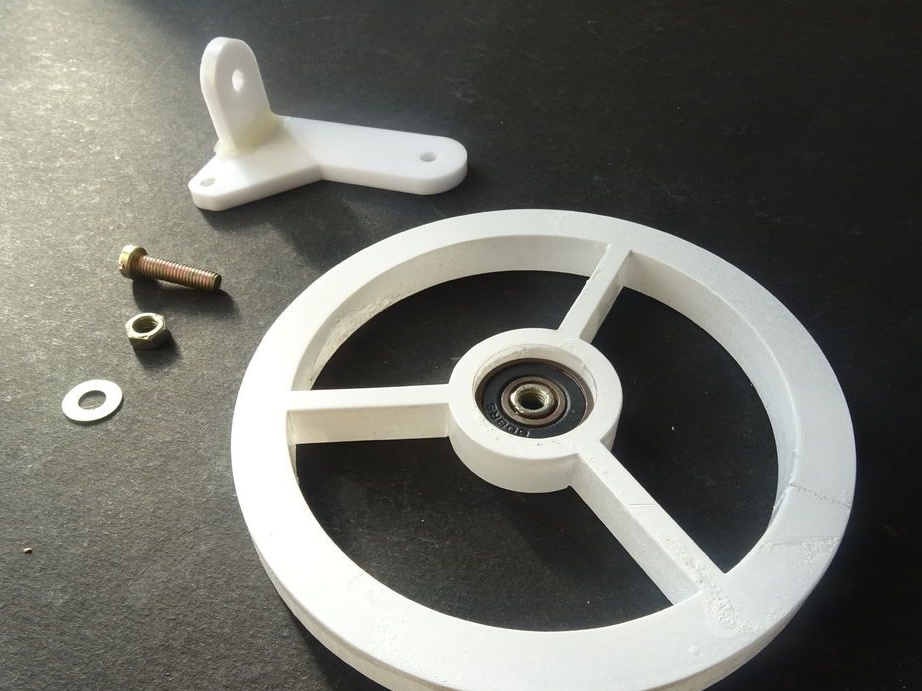
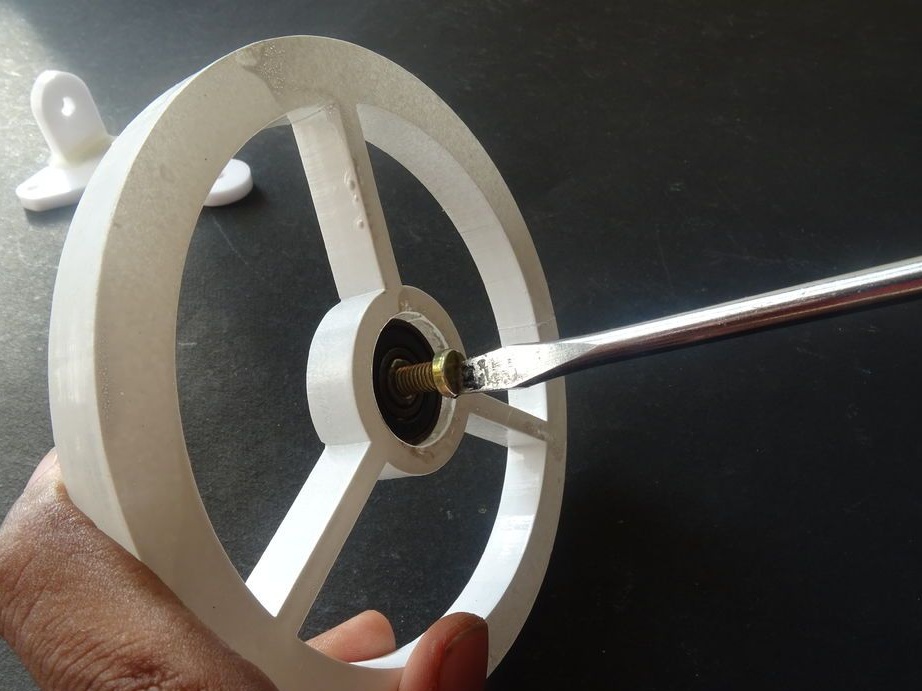
Paso once: ensamblaje de la rueda
En los pernos recoge dos llantas. Los tornillos no están completamente apretados.




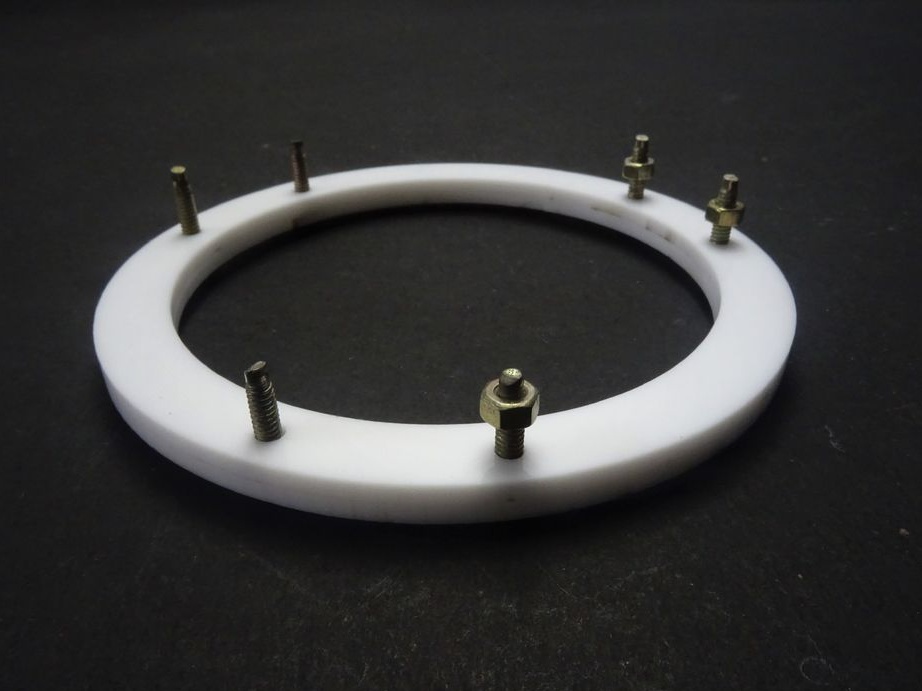
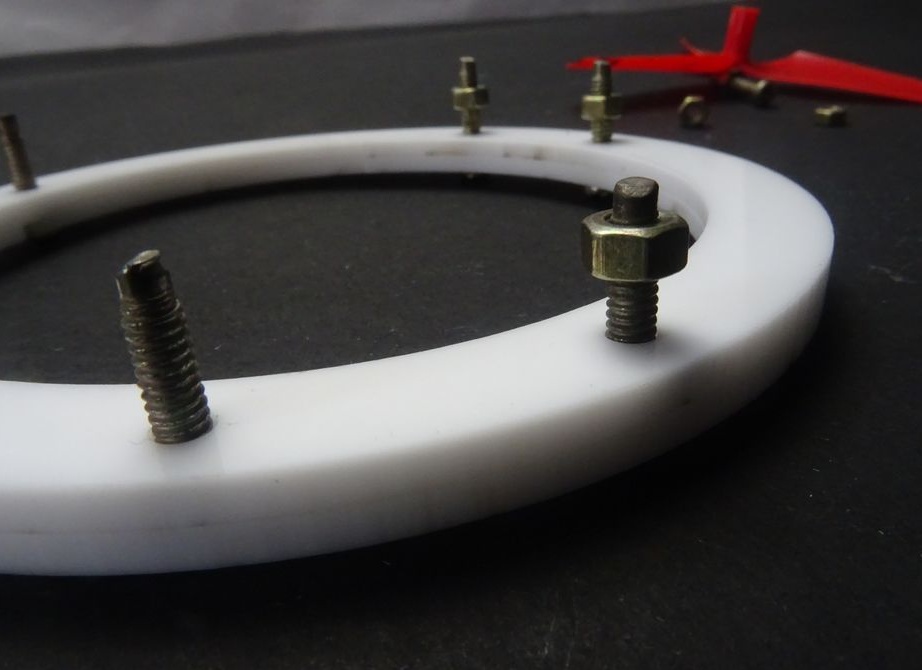
Entre los discos instala tornillos y aprieta los tornillos. Al instalar el tornillo, debe usar la plantilla para centrarlo.
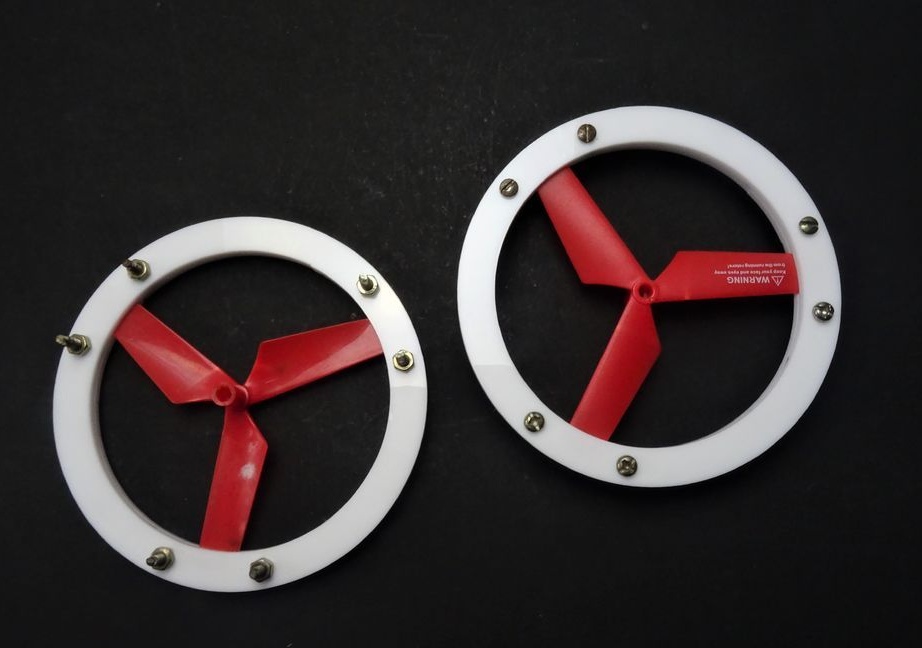
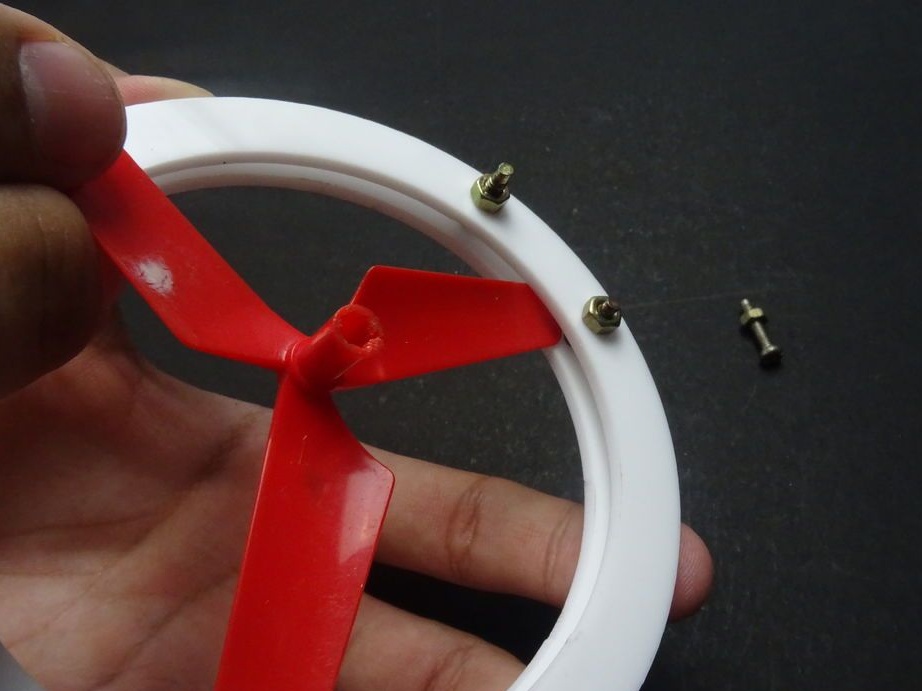
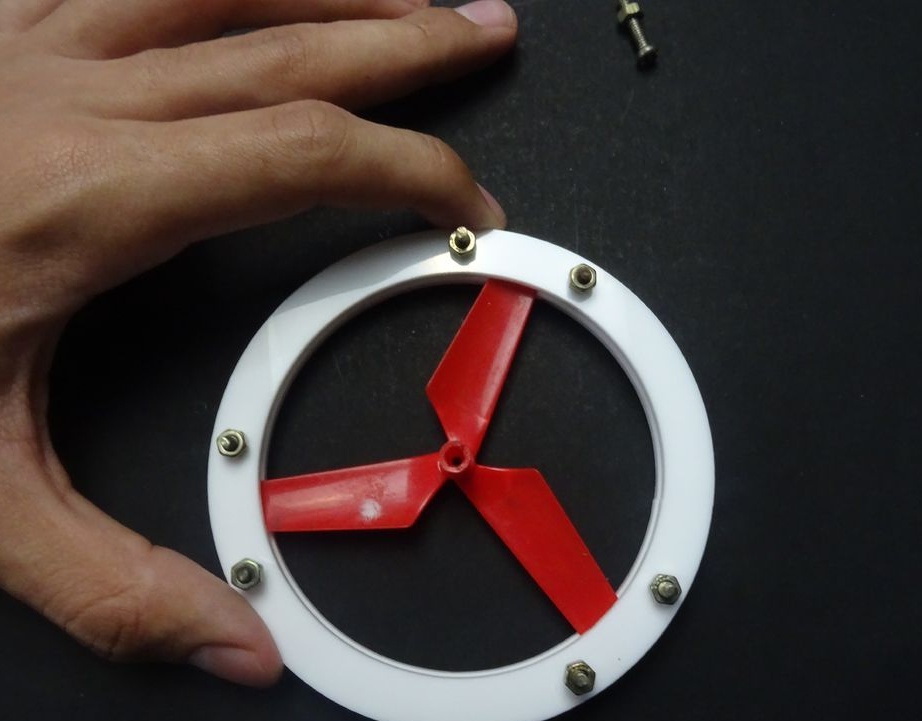
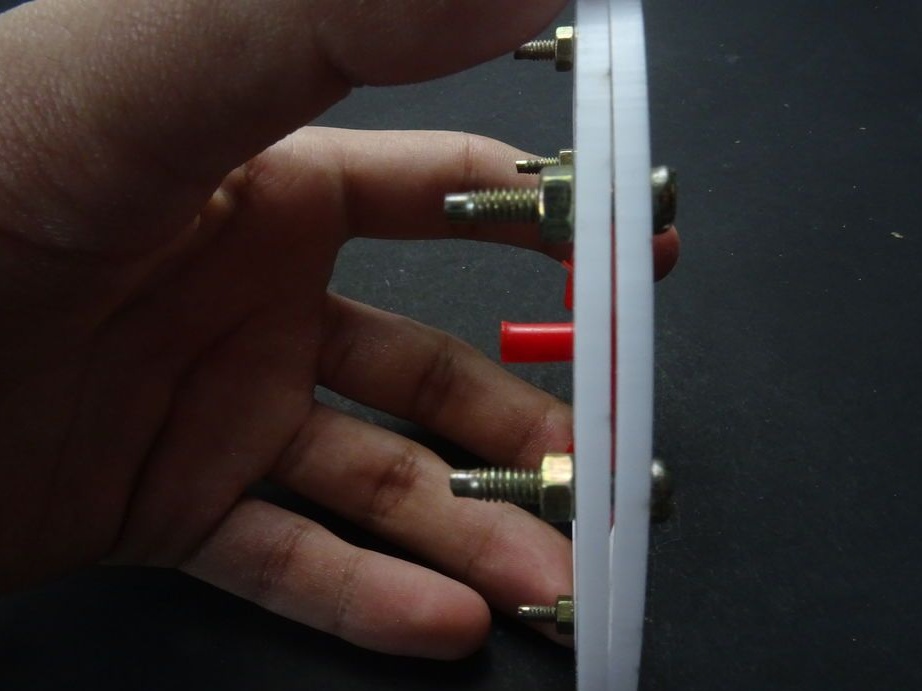

Establece el borde exterior de la rueda. El borde debe estar al ras del disco interno.
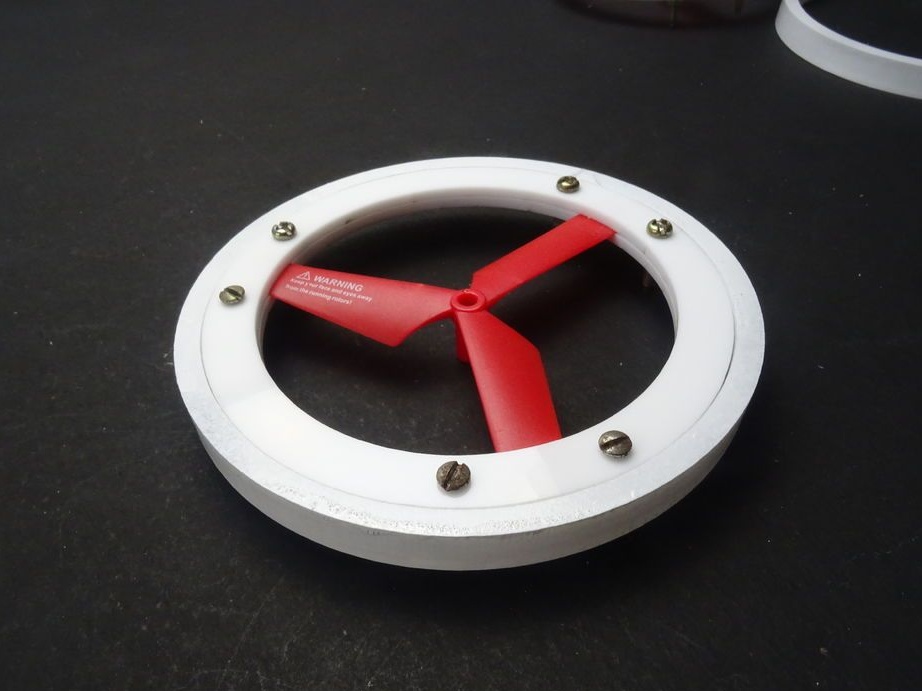

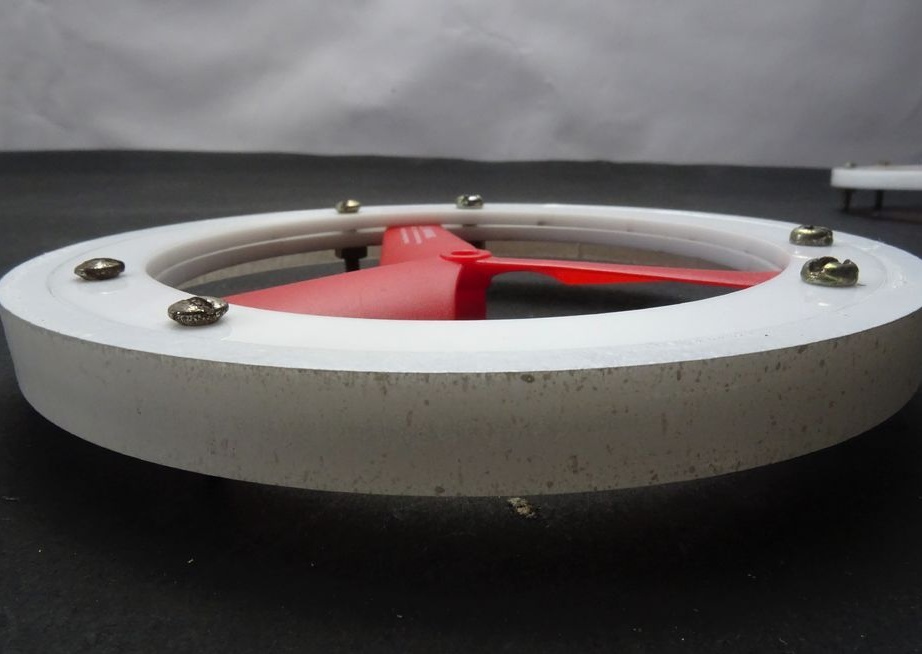

Aplique pegamento caliente a la articulación.


Ahora recoge las ruedas delanteras.
Una tuerca de un tamaño adecuado se atasca en la pista interna del rodamiento. Presiona los rodamientos en las ruedas delanteras.



Las ruedas están listas.

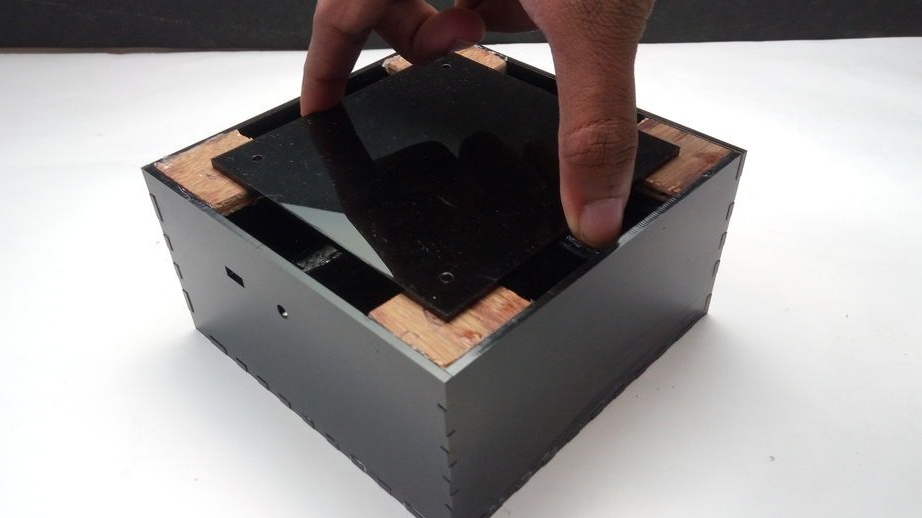
Paso Doce: Caja Electrónica
Pega la carcasa para la electrónica.
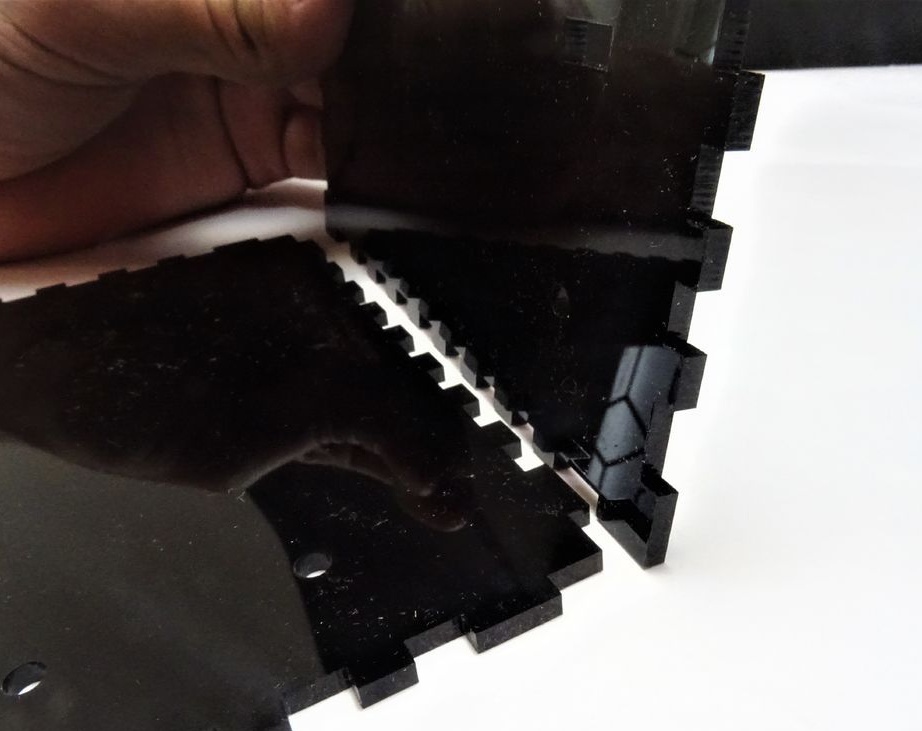

Esta caja contendrá todo electronica componentes, lo que significa que debe impermeabilizarse lo más completamente posible.


Se cortan y pegan cuatro cuadrados del tablero en las esquinas de la caja. La tapa de la caja se unirá a ellos.



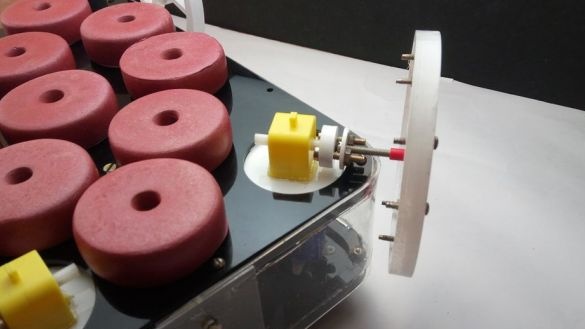
Paso trece: montaje de la rueda
Ahora necesita conectar las ruedas y el engranaje con un embrague.





Atornilla las ruedas delanteras a la tracción.


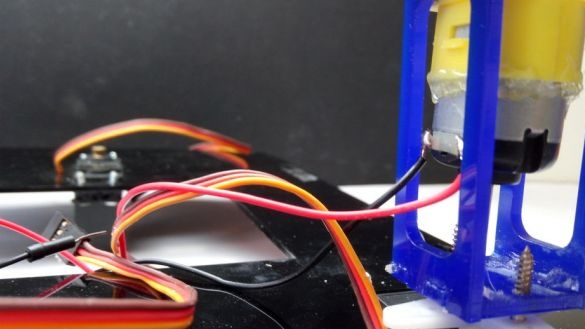
Paso Catorce: Conecte la electrónica
Según el esquema, instala piezas eléctricas.
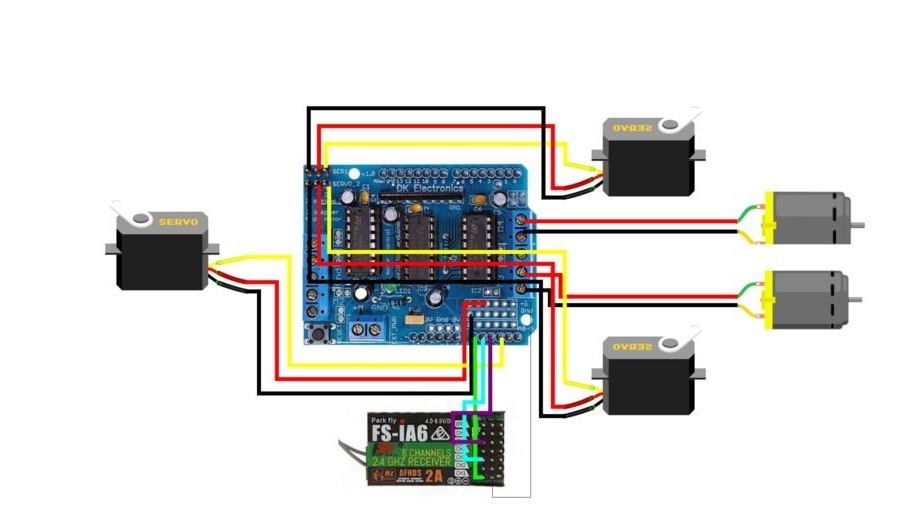

Los cables del motor izquierdo a M1, el derecho a M2. Conecta un controlador de motor. Conecta servos. Instala el receptor: gnd del receptor a gnd Arduino; Receptor de +5 V a +5 V Arduino; pin 3 a A0; pin 1 a A1; pin 5 a A2. Conecta la batería.
Paso quince: descarga el código
Primero necesitas descargar la biblioteca.
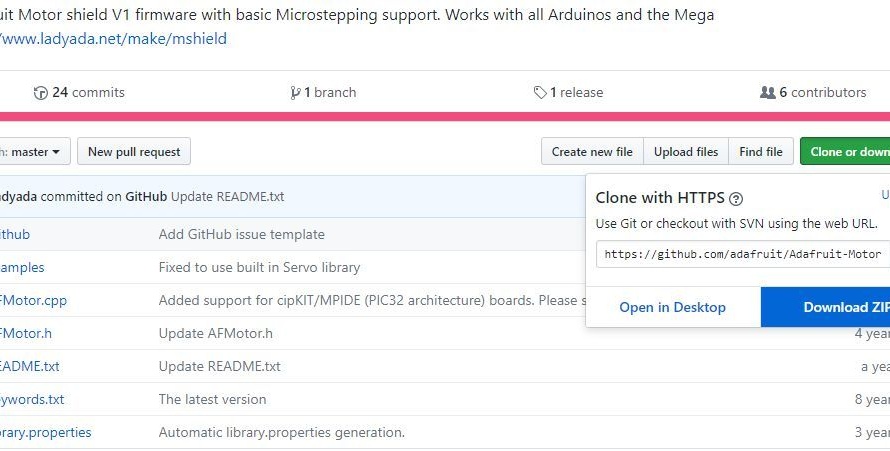
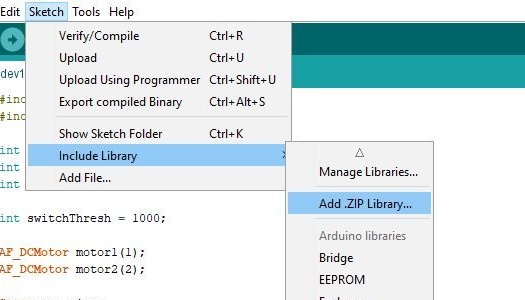
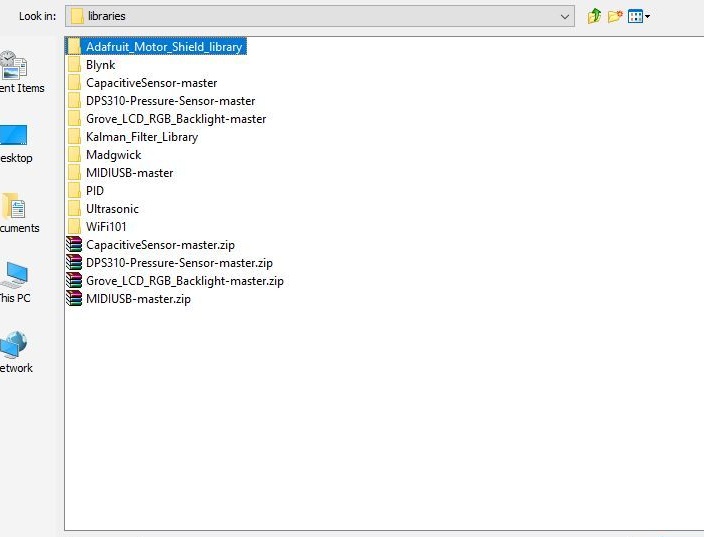
A continuación, descargue el código. Al cargar, la batería debe estar desconectada.
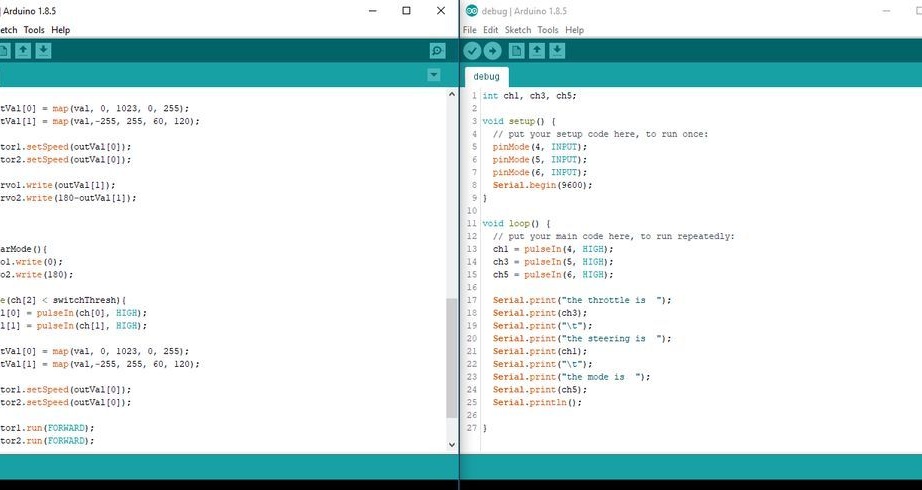
Descargue el código a continuación.
amphibious_rover_code.ino
Después de descargar el código, verifica el funcionamiento de motores y unidades.
Paso dieciséis: montaje
Ahora es el momento de ensamblar el vehículo todo terreno.
[centro[/ centro]
Instala servos. Instala motores de engranajes.

Abrocha las ruedas. Gira ambas mitades del cuerpo.






Todo está listo y ahora puedes probar.