


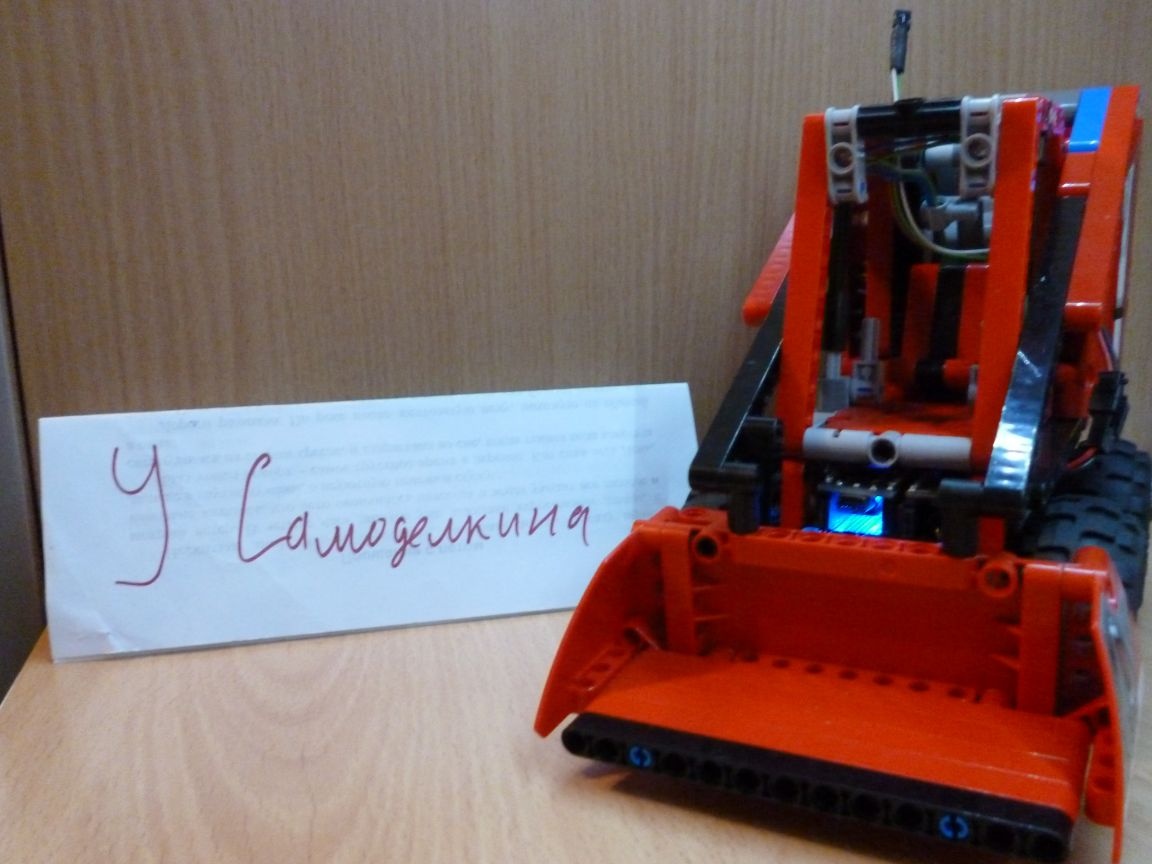
Entonces, tomando la técnica de lego de mi hijo y en casa Arduino Nano comenzó a combinar estos diseñadores.
Necesitaremos:
- Lego Technic (kits 42029 y 42033)
- Arduino Nano (enlace a la pizarra)
- DRV 8833
- 2 servoaccionamientos SG-90
- receptor IR
- motorreductor
- 2 LED
- 2 resistencias 150 ohmios
- Condensador 10v 1000uF
- 2 peines de una hilera PLS-40
- 2 conectores PBS-20
- Inductor 68mkGn
- 4 baterías NI-Mn 1.2v 1000mA
- Conector papá-mamá de dos pines para cablear
- Homutik
- Alambres de diferentes colores.
- soldadura
- Resina
- soldador
- Pernos 3x40 y tuercas y arandelas para ellos.
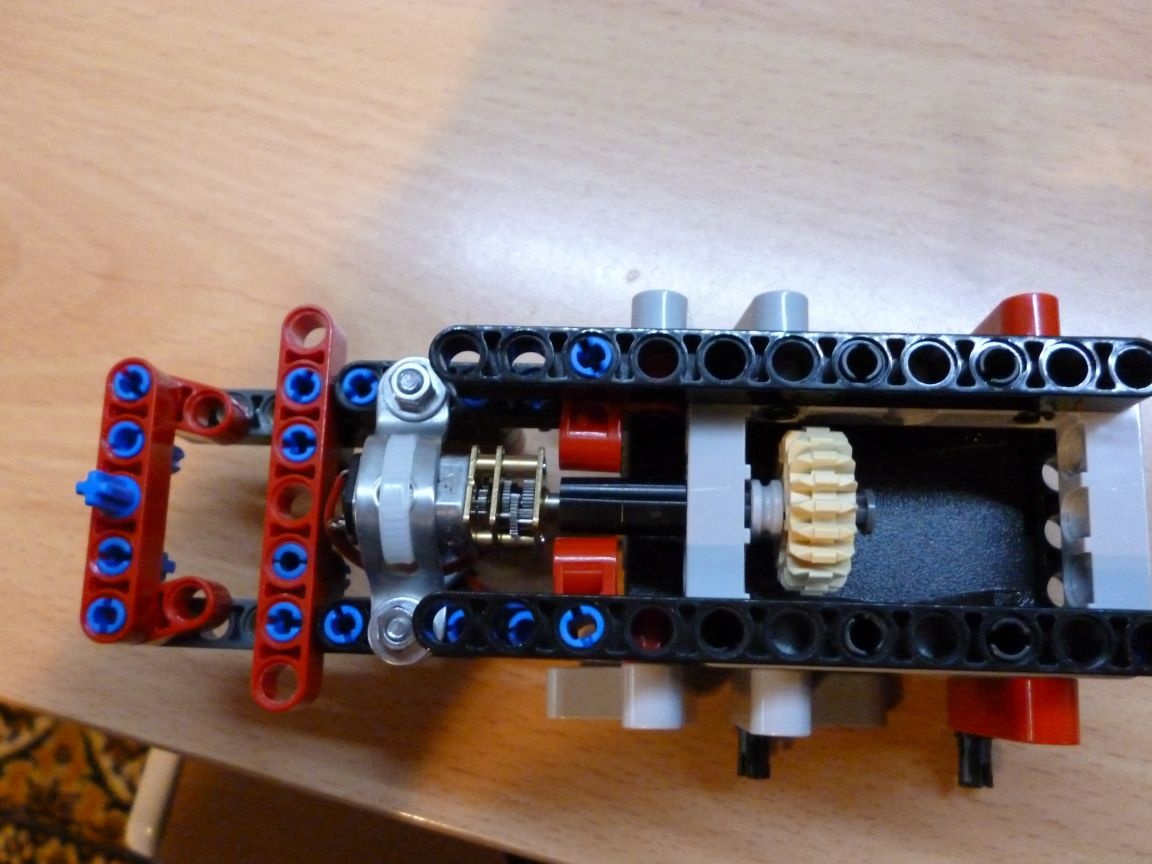
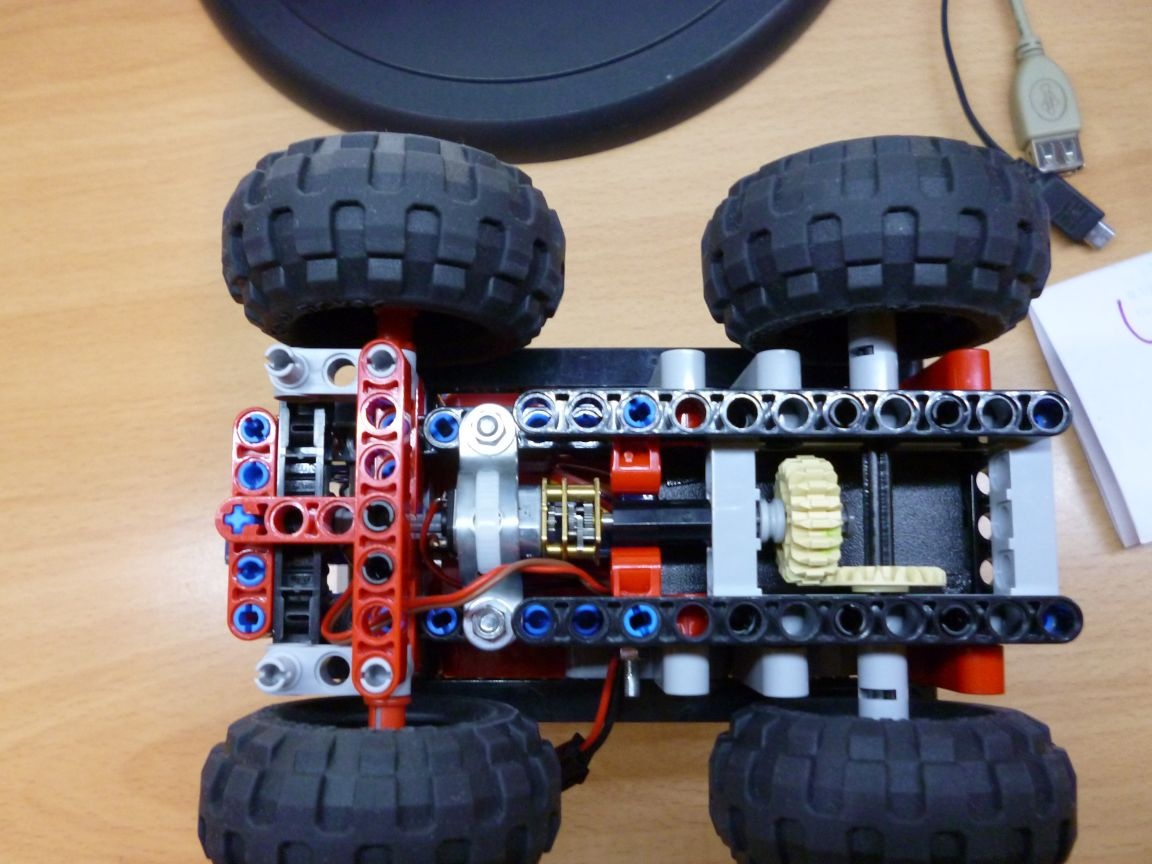
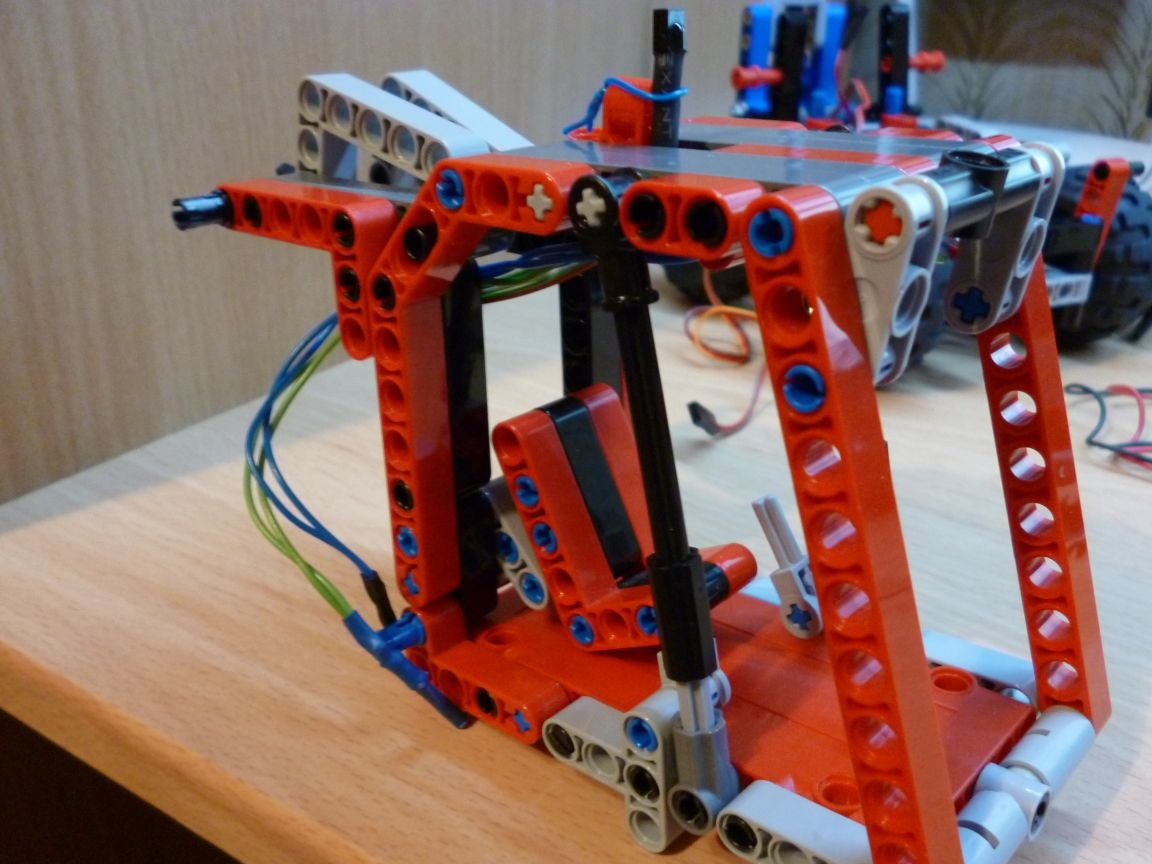
Paso 1 ensamble el chasis y el eje de transmisión.
Puede ensamblar cualquier chasis de Technic, de todos modos, resultó así.
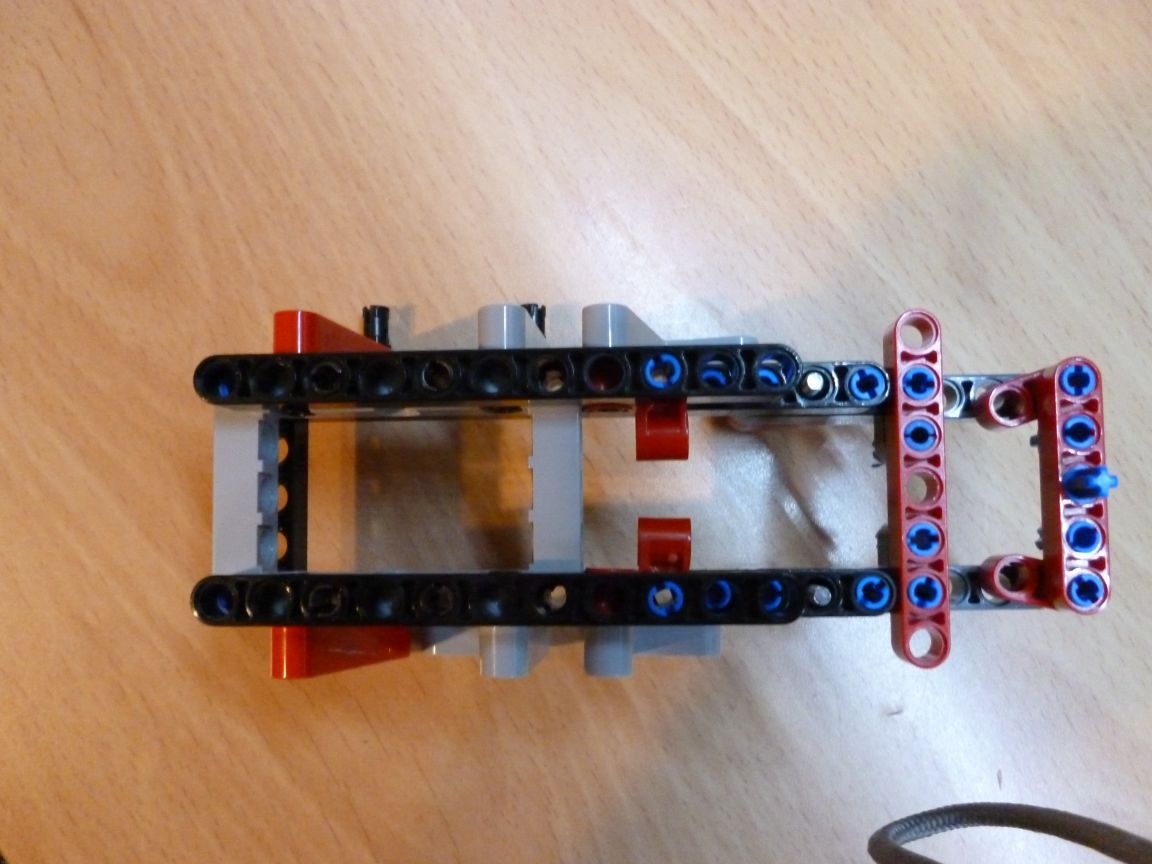
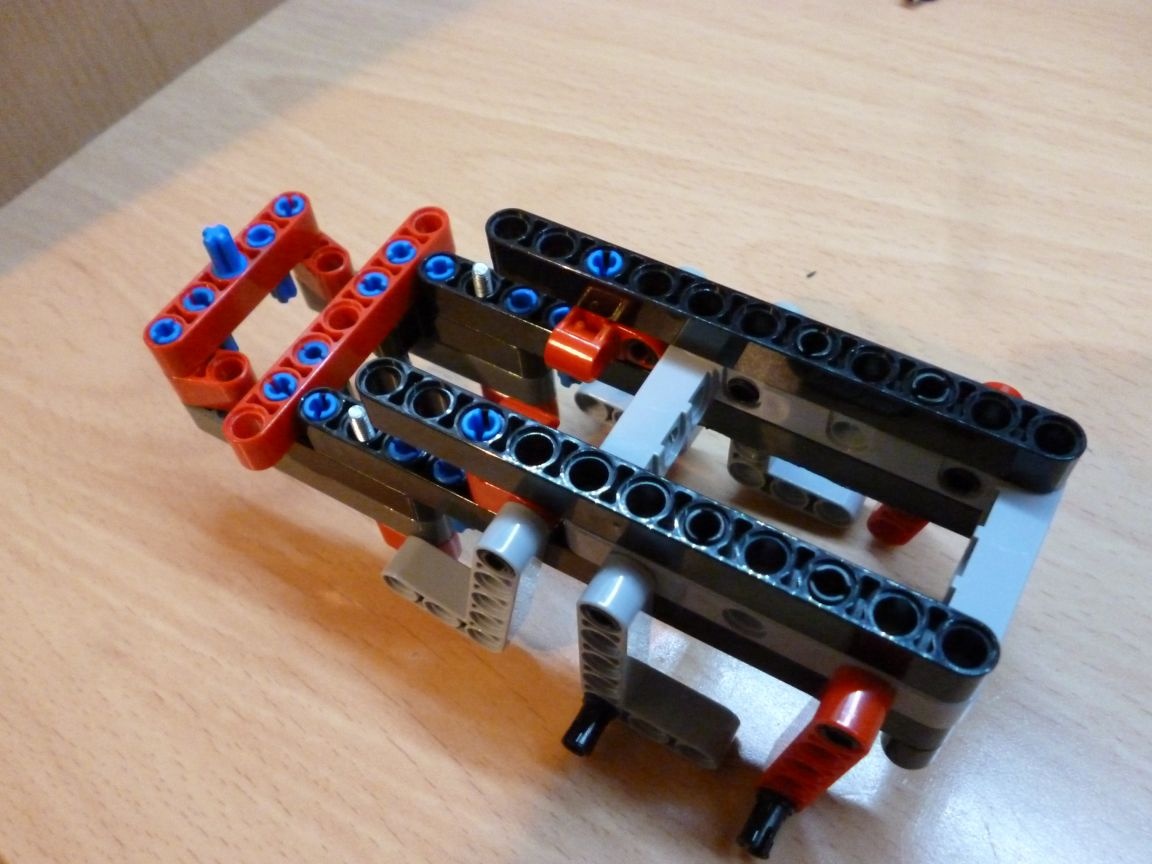
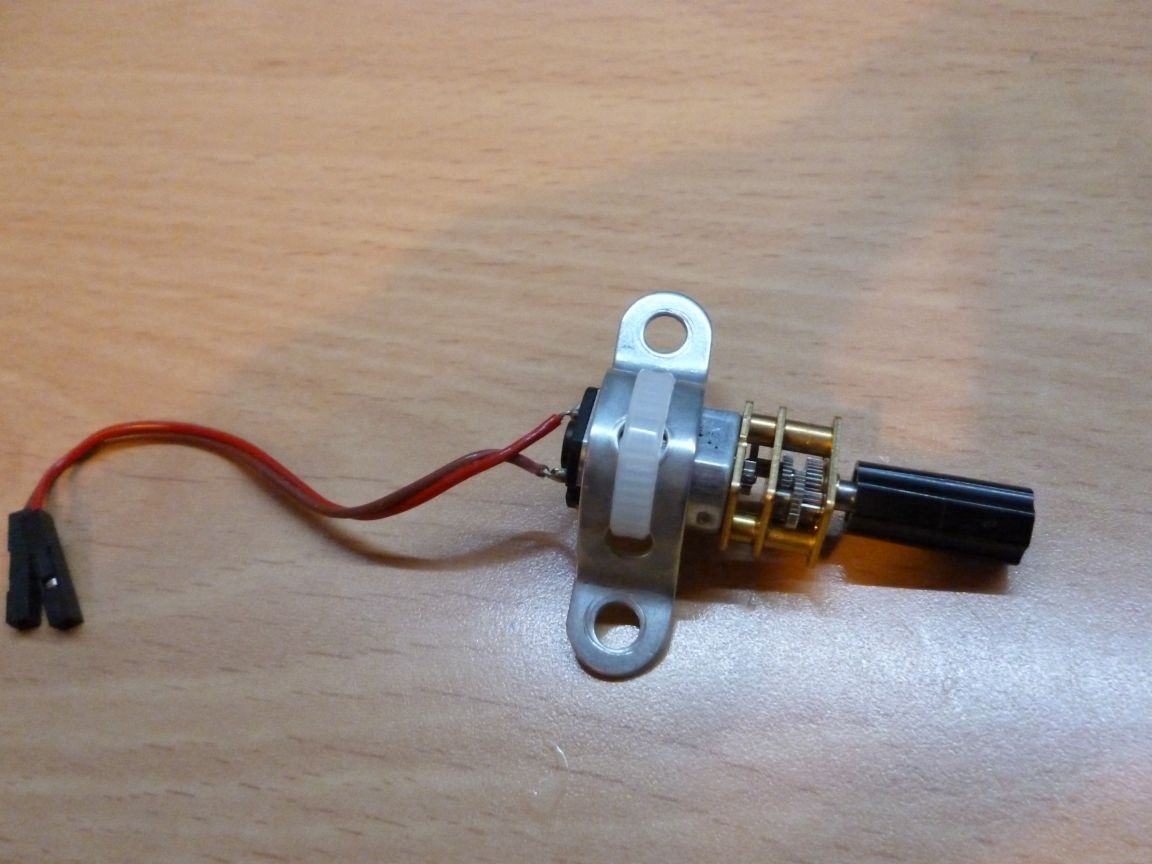
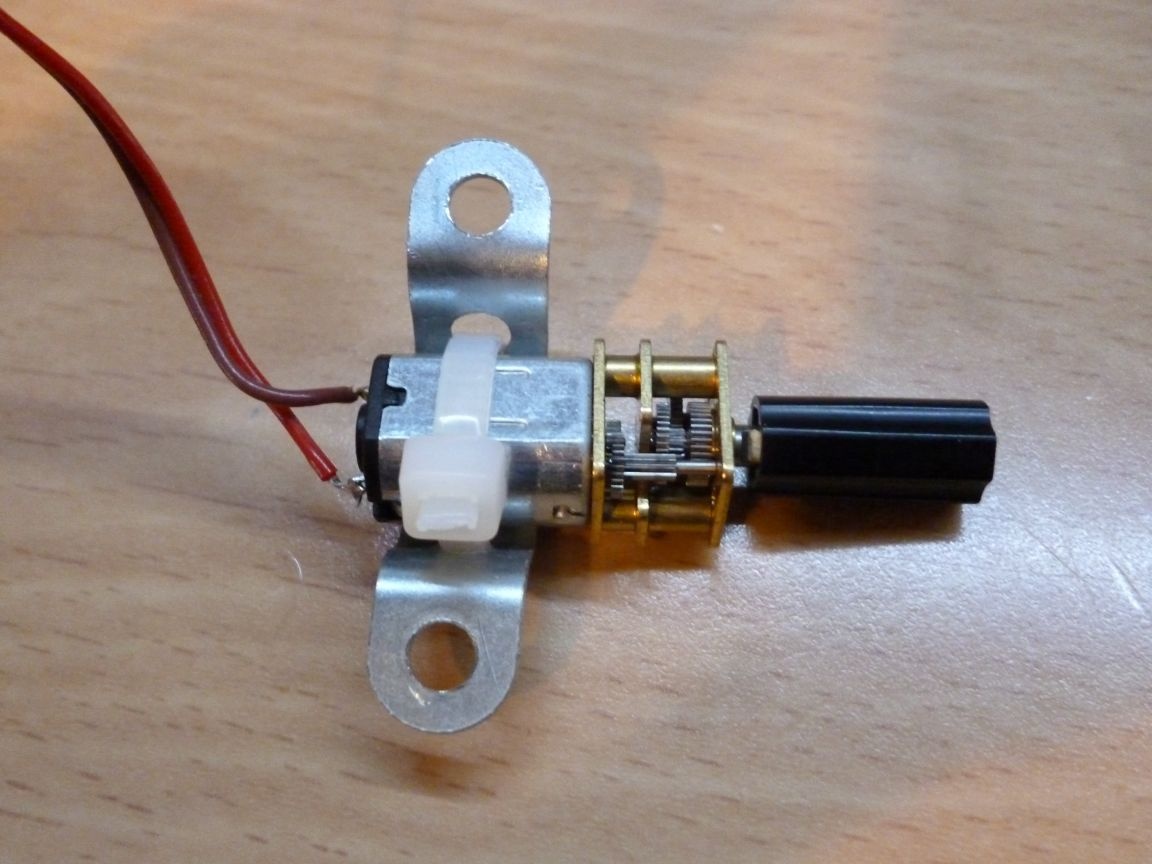
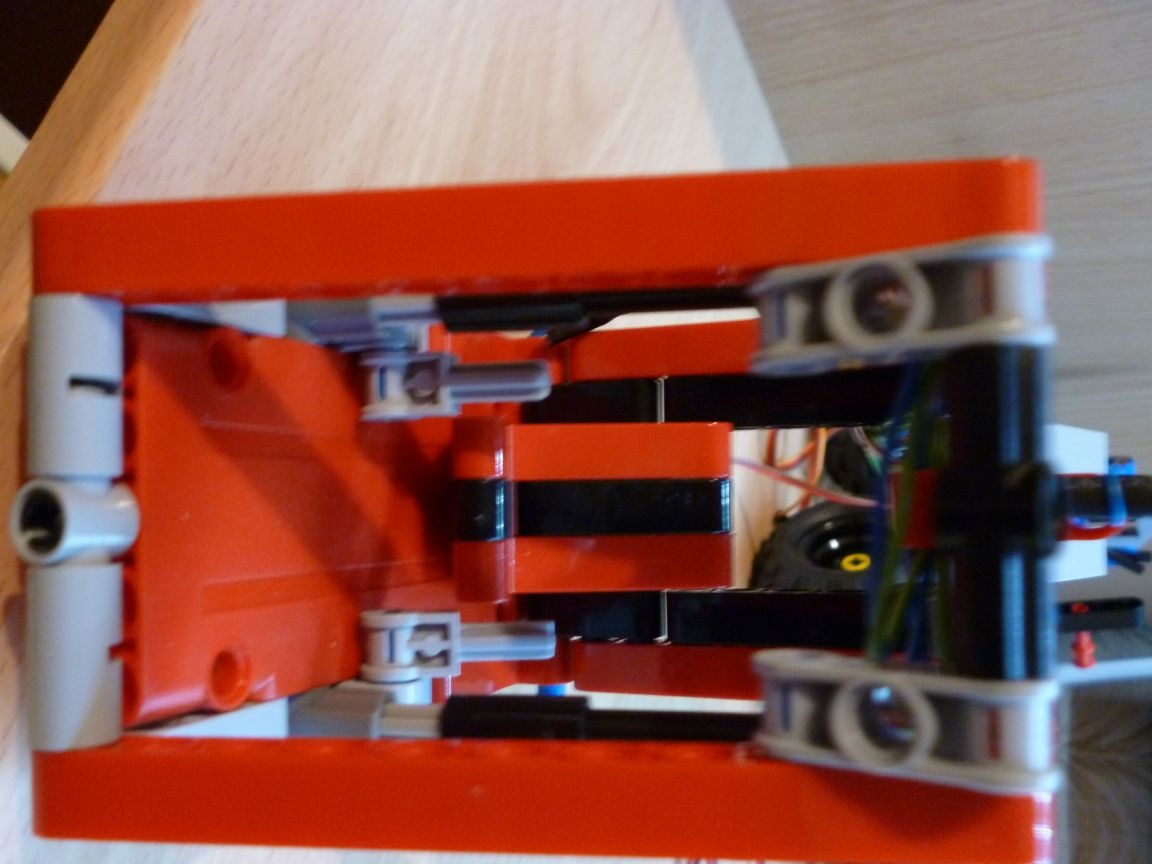
Solo existe el problema de conectar el motorreductor con las partes del diseñador. Decidí esto de la siguiente manera: coloqué en el eje del motorreductor un manguito de conexión e inserté un pedazo de fósforo para la fijación. Para el montaje del motorreductor se utilizó plástico metálico de un diseñador de hierro y una abrazadera. Resultó lo siguiente:
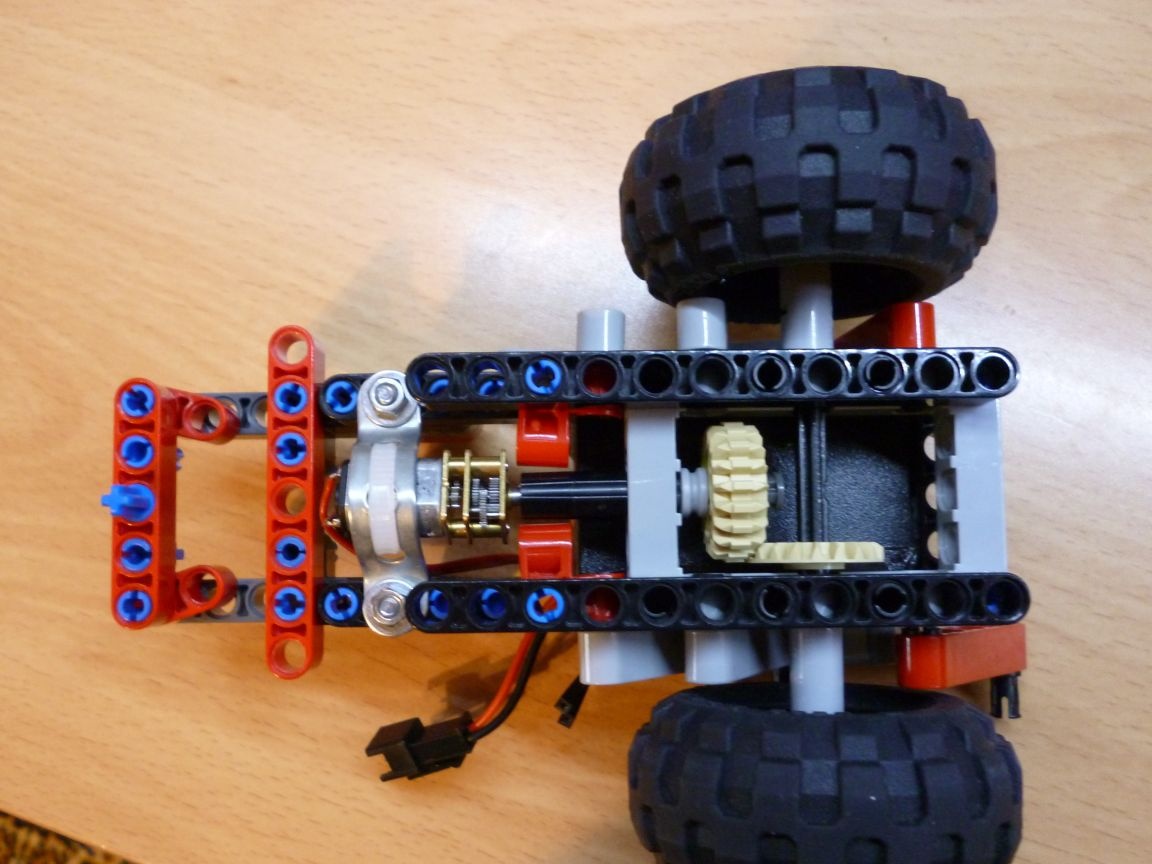
A continuación, instalamos el diseño resultante en el chasis utilizando 3x40 tornillos:
Y ponte las ruedas:
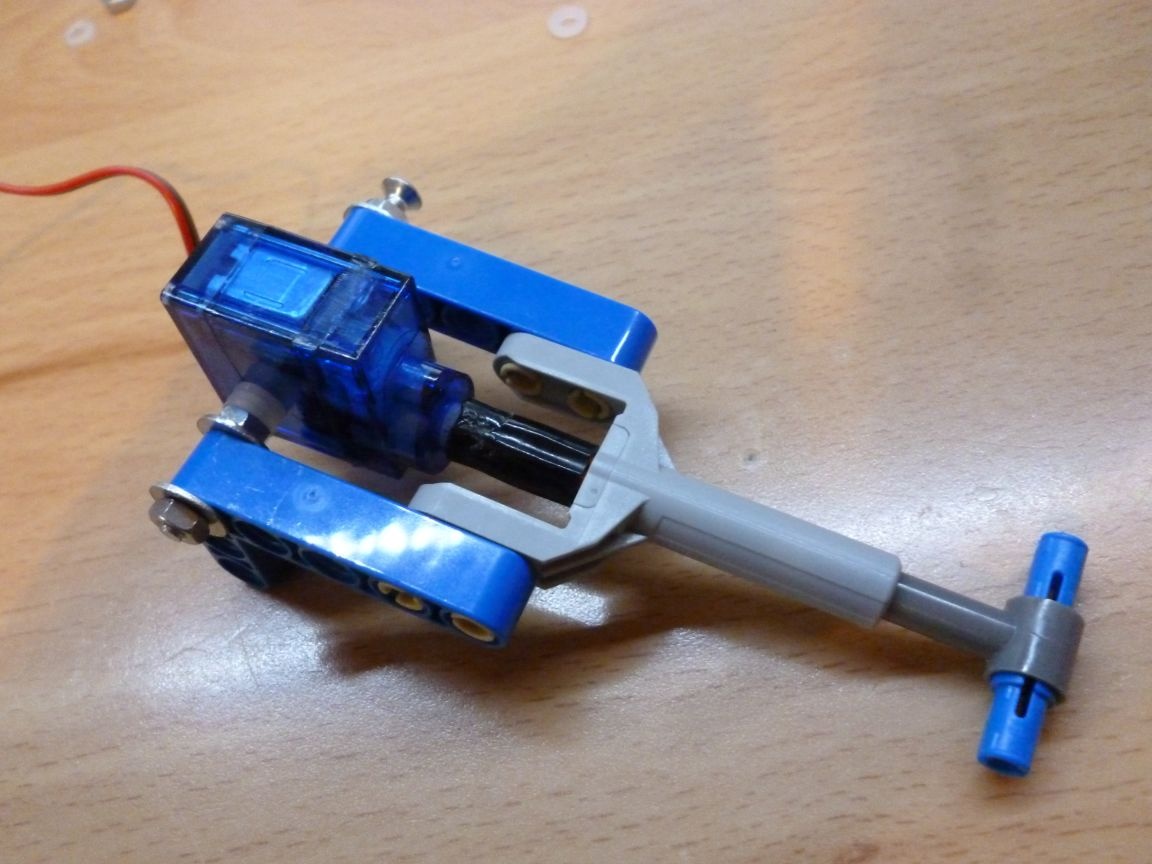
Paso 2 ruedas giratorias
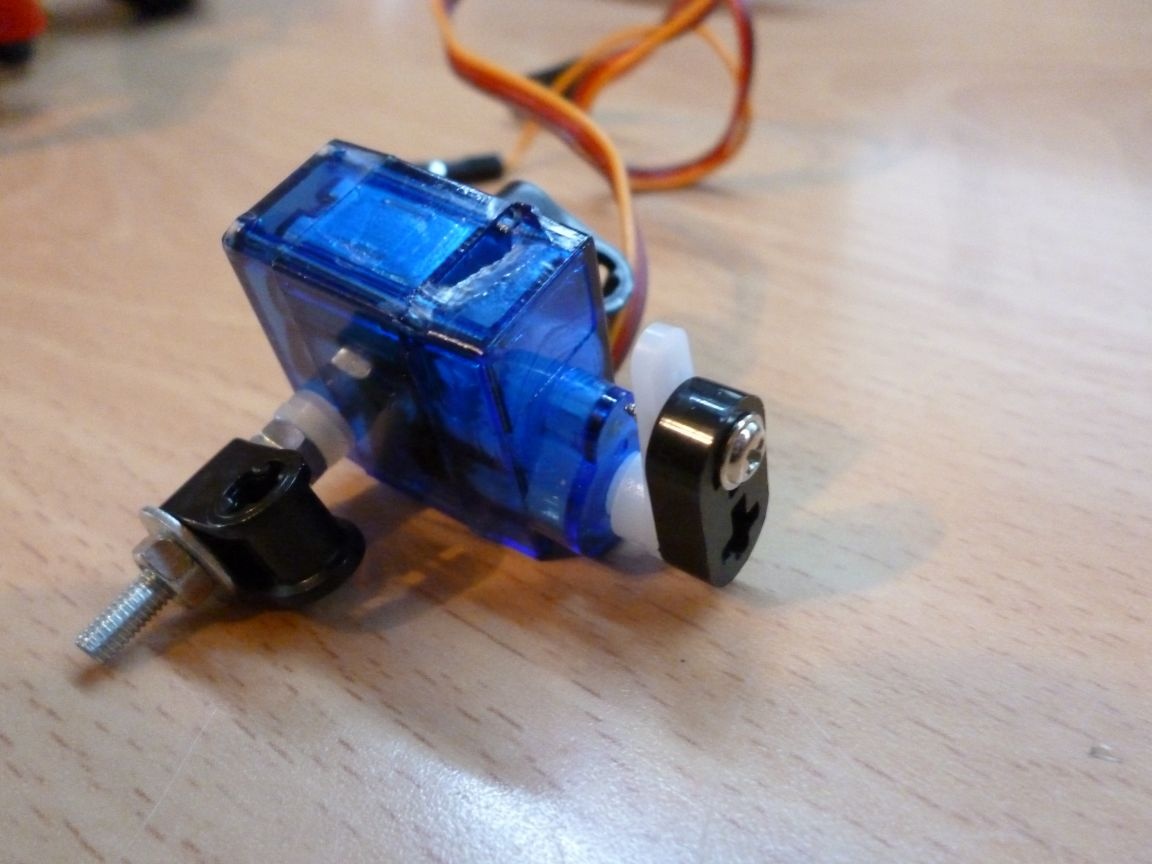
Para llevar a cabo la rotación tomó el servo SG-90. Es necesario perforar cuidadosamente, para no tocar las partes internas, un orificio pasante con un diámetro de 3.2 mm o simplemente cortar con un cuchillo de papelería.

Insertamos un tornillo en el agujero hecho, y las esquinas a lo largo de los bordes y lo fijamos con tuercas:

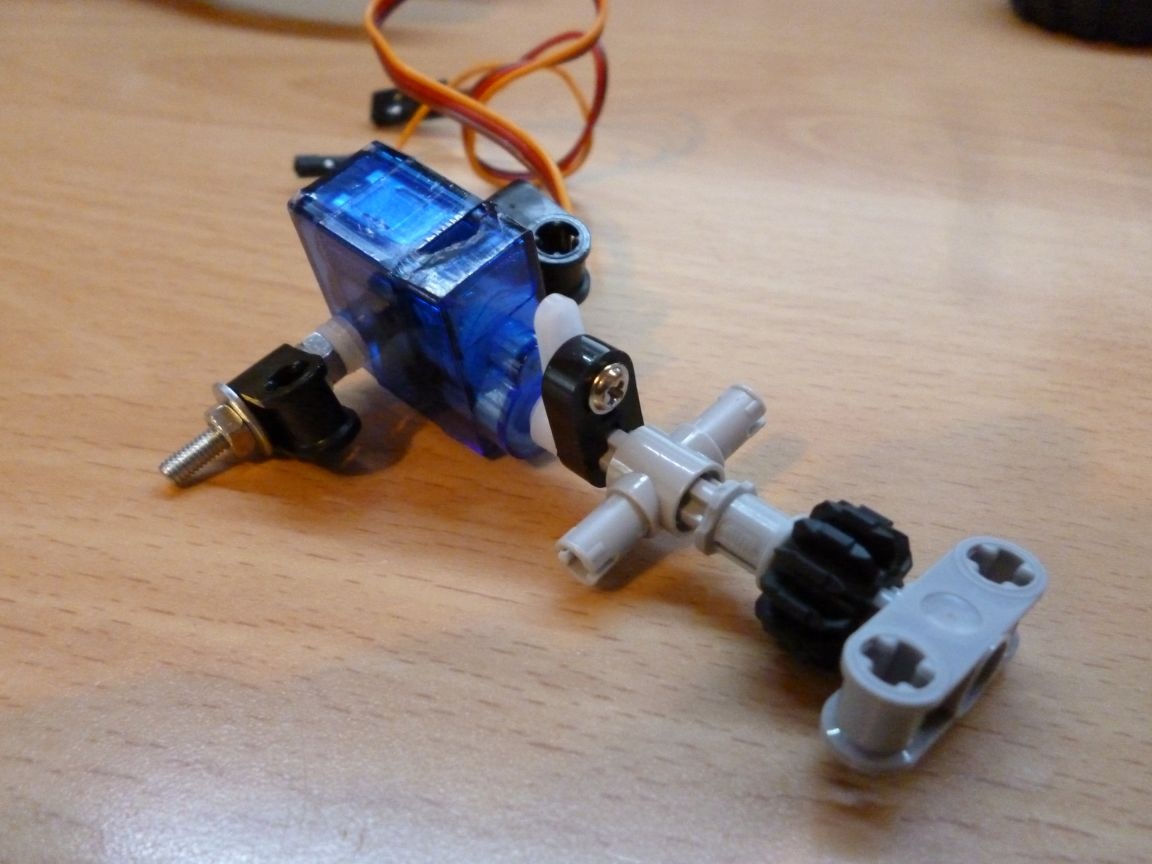
En el servoeje ponemos una palanca con una parte atornillada de lego:
Y finalmente el conjunto giratorio:
Nos ponemos el chasis:

Ponerse sobre las ruedas:
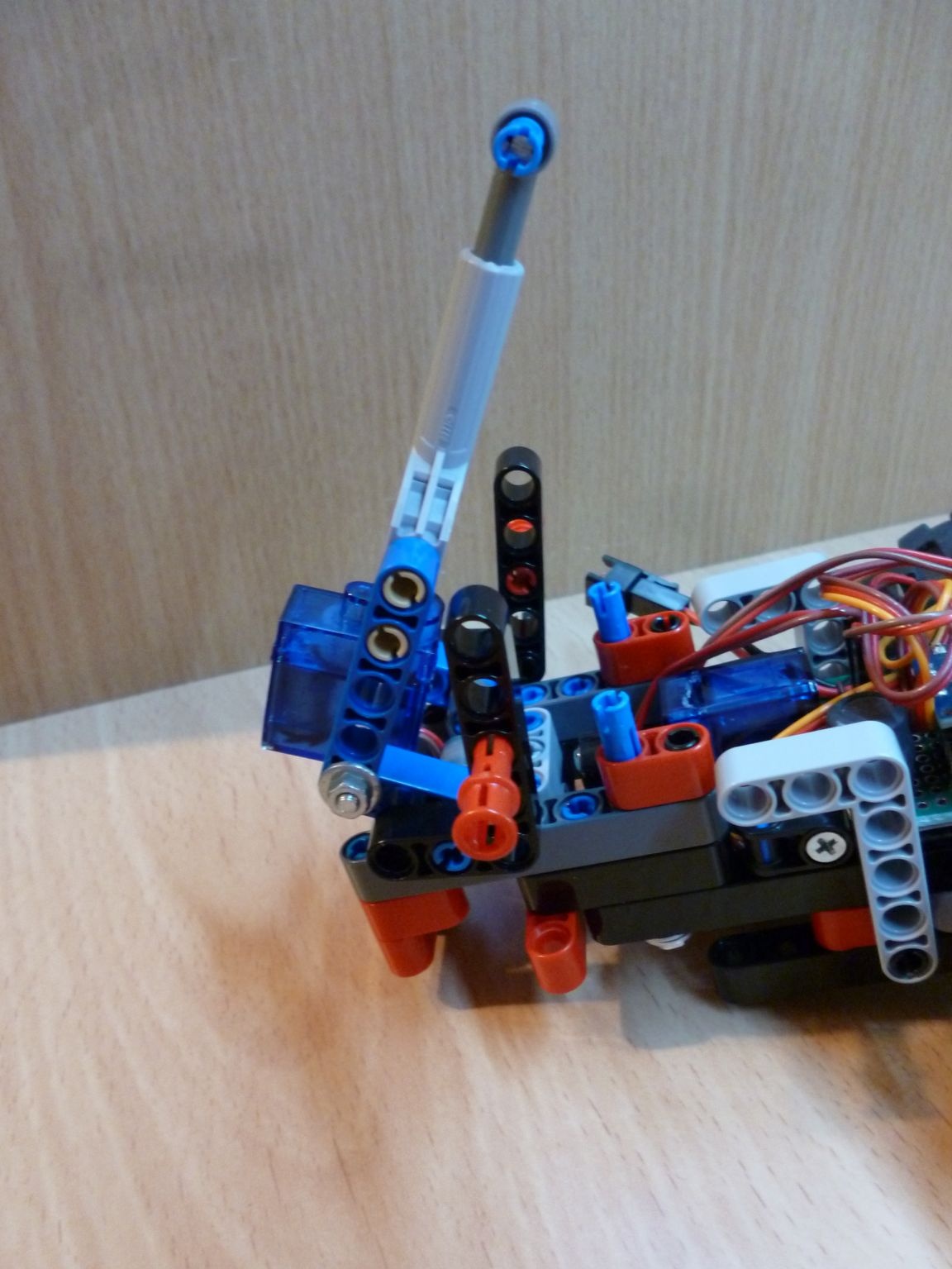
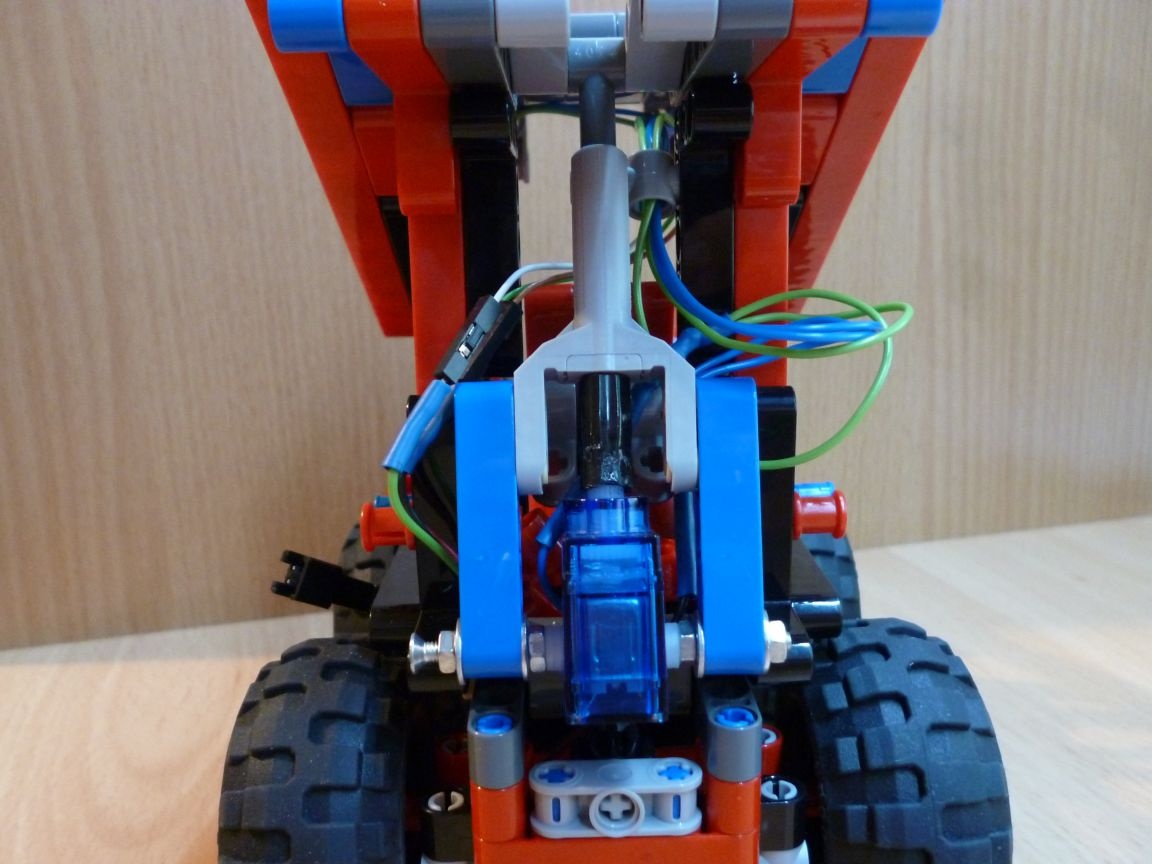
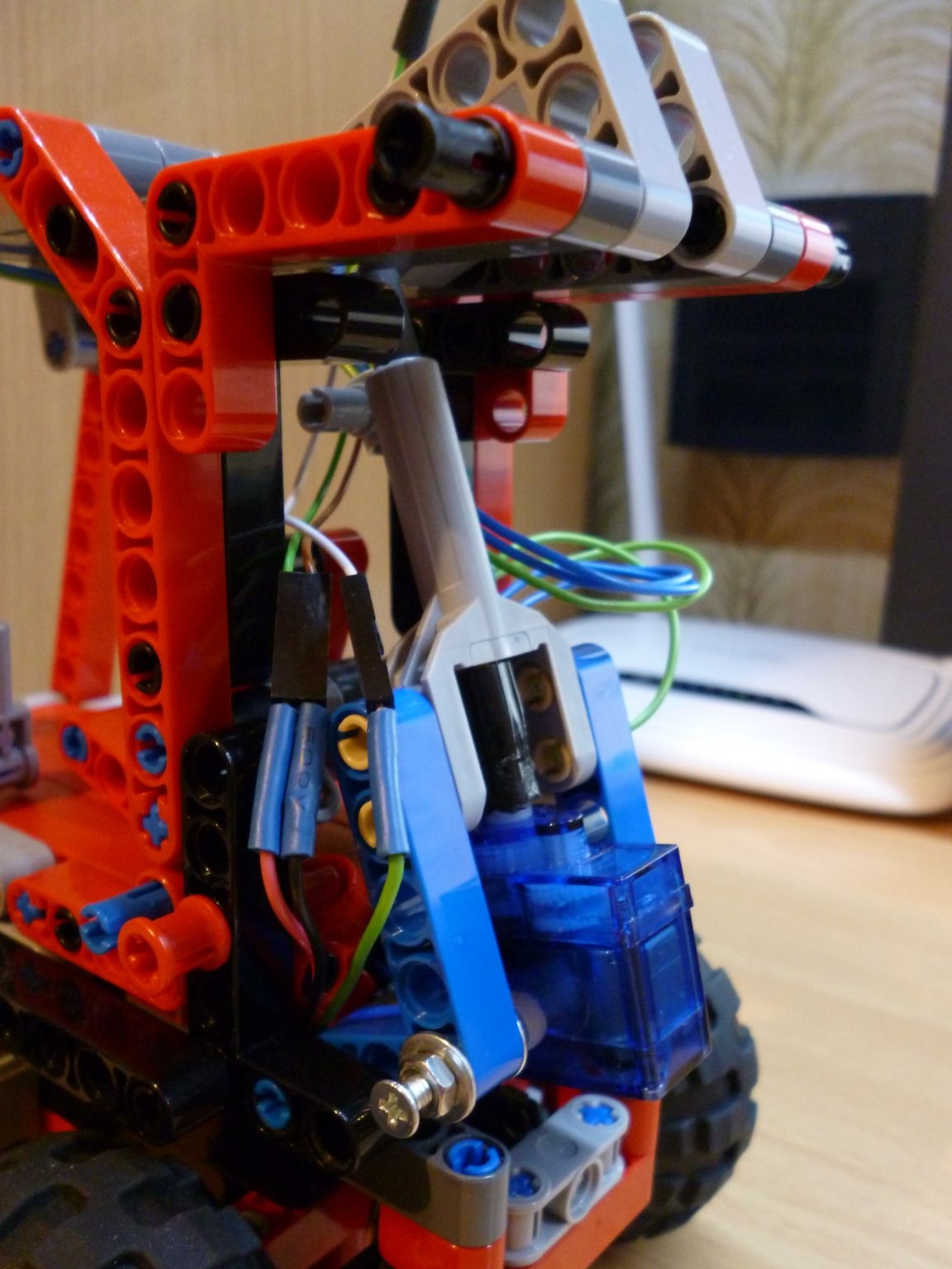
Paso 3 equipo de elevación.
Para levantar el cucharón se tomó un servo modificado SG-90. El objetivo de su modificación es quitar el controlador interno y soldar los cables directamente al motor para hacer que un motorreductor salga del servoaccionamiento, es decir, para que pueda girar por completo. Además del primer servo, debe hacer un orificio pasante para el montaje:
Instalar en el chasis:
Paso 4 cabina.
Es necesario ensamblar una cabina de lego technic a partir de fotografías:

El paso 5 es un electricista.
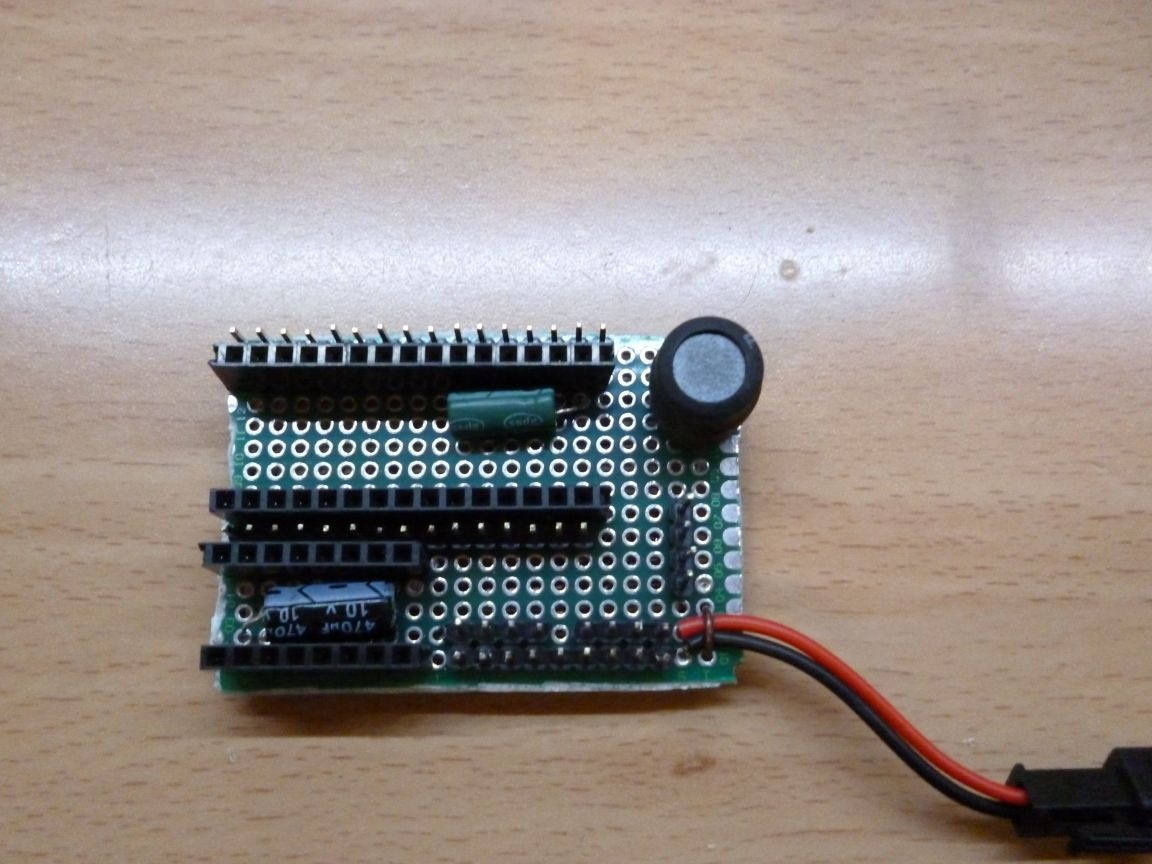
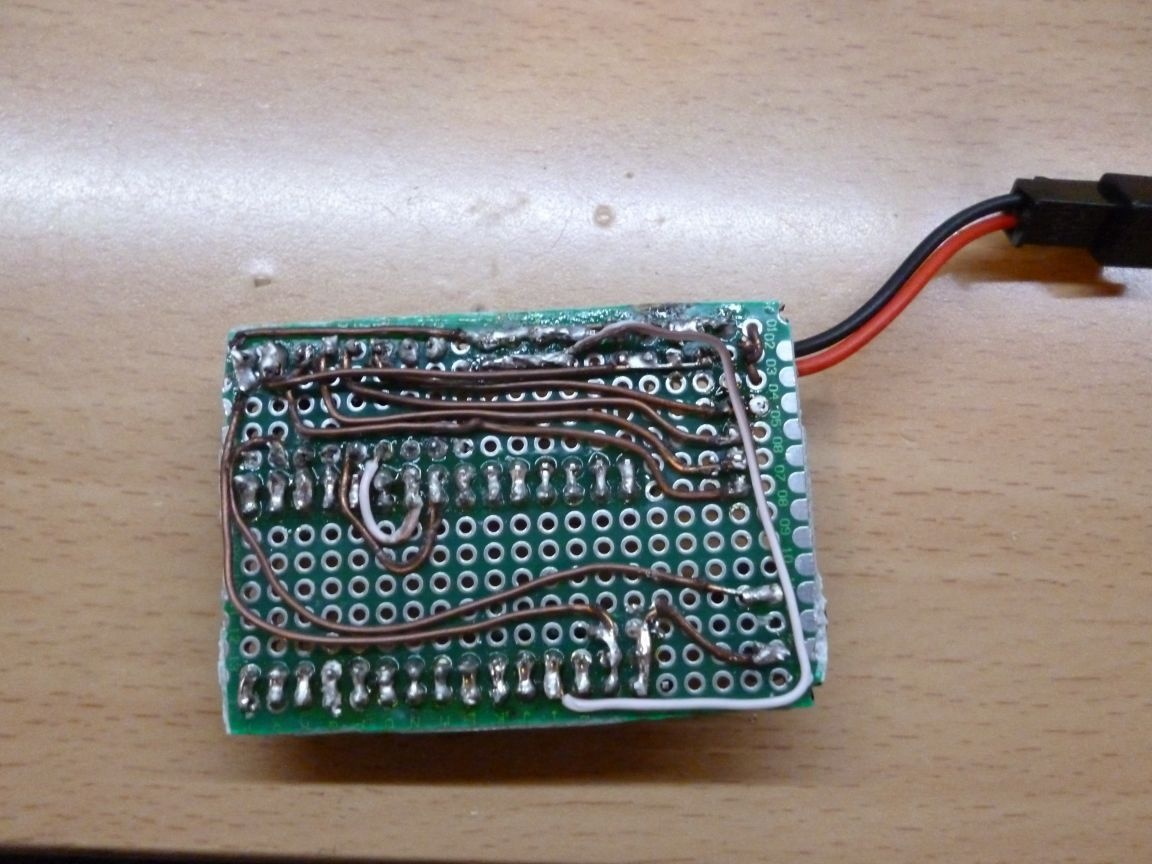
Aquí tienes que tomar un soldador. Para mayor comodidad, debe soldar todo en la placa de circuito de acuerdo con el siguiente diagrama:
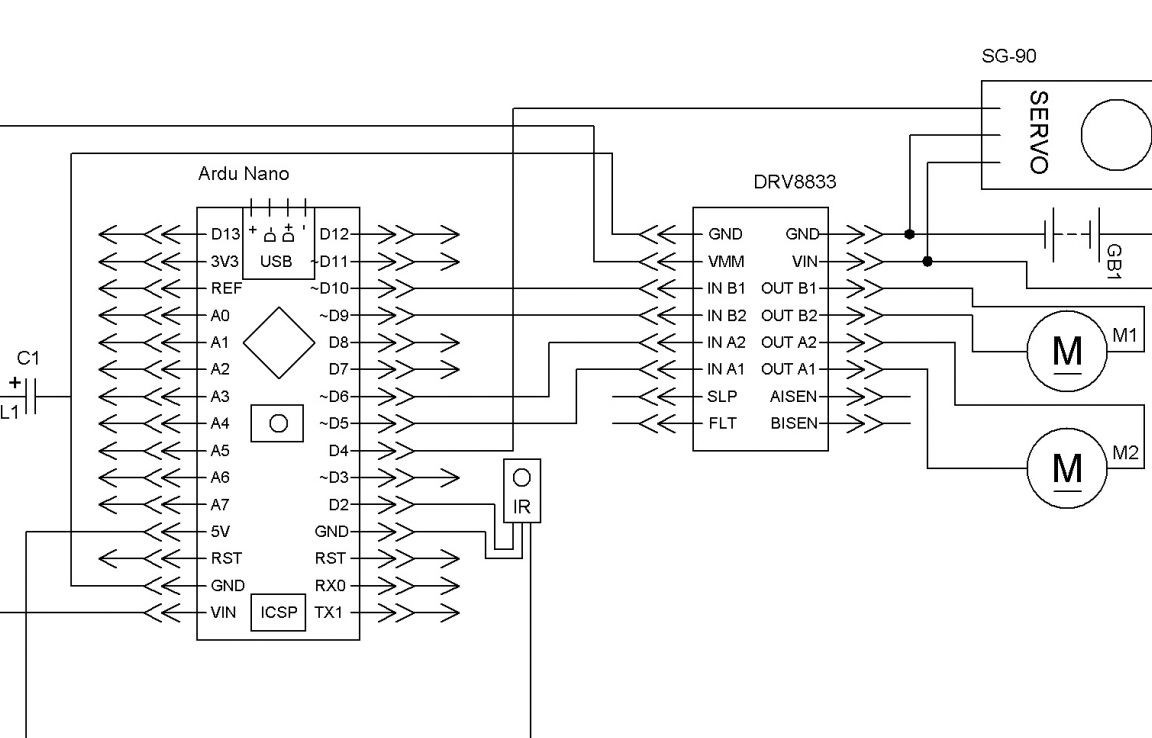
Creo que vale la pena explicar un poco: puedes tomar cualquier condensador de baja potencia, también puedes encontrar un inductor de cualquier tipo, esto es necesario para estabilizar el voltaje del microcontrolador. Las resistencias deben seleccionarse para los LED utilizados. Tomé un receptor IR de un juguete viejo, pero puedes comprarlo en una tienda de radio. Si hay una fuerte interferencia, agregue un condensador al circuito de alimentación del receptor IR.
Tengo esto:
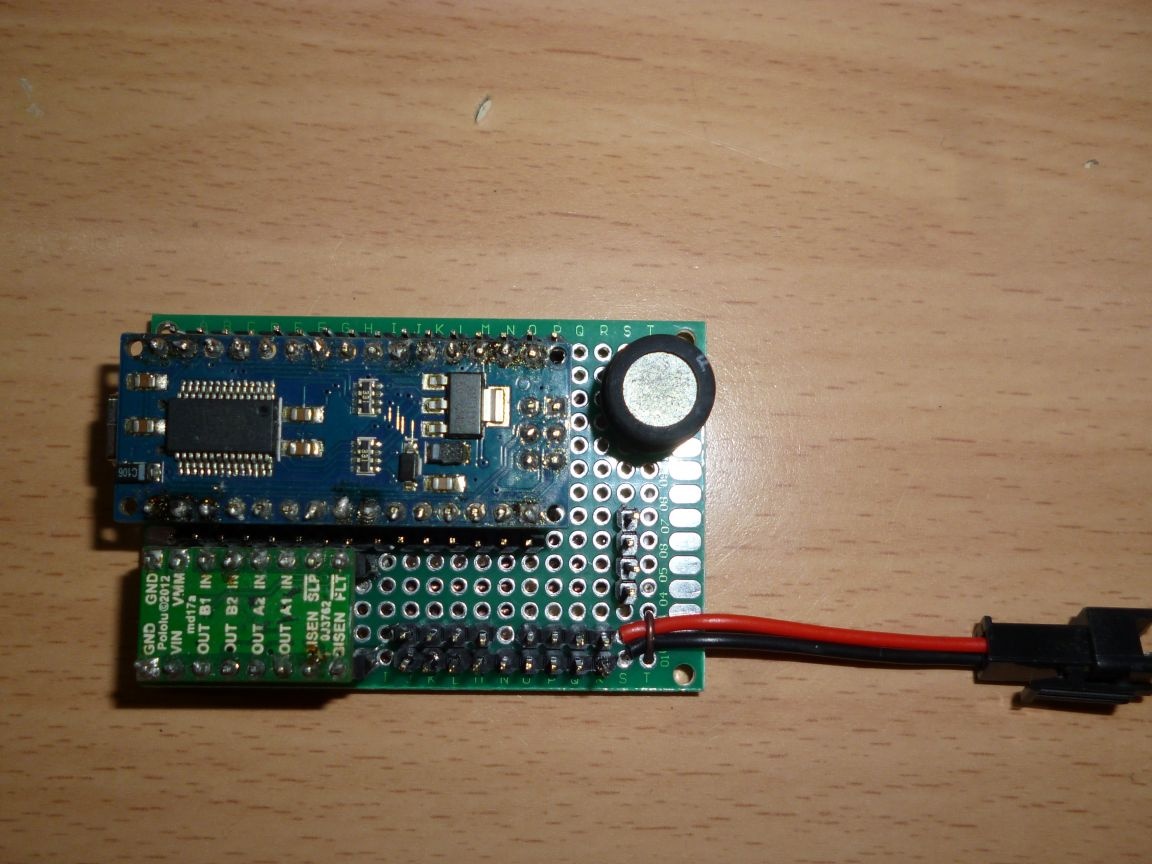
Instalamos Arduino Nano y DRV 8833 en sus lugares:
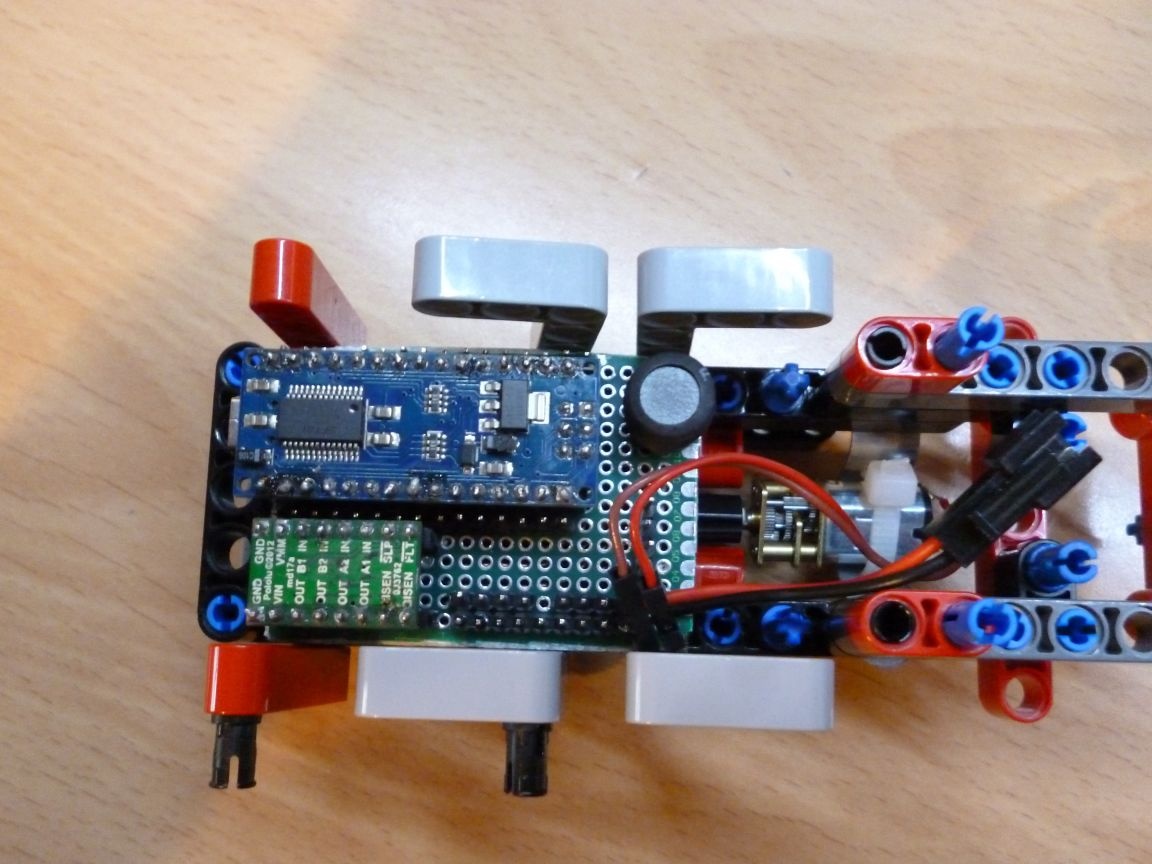
Y ahora colocamos la placa en el chasis (quitamos las ruedas por conveniencia):
Para la alimentación, utilicé 4 baterías Ni-Mn 1.2v 1000mA conectadas en serie y enrolladas con cinta aislante. Los pegué con cinta adhesiva de doble cara debajo de la tapa de la cabina trasera.
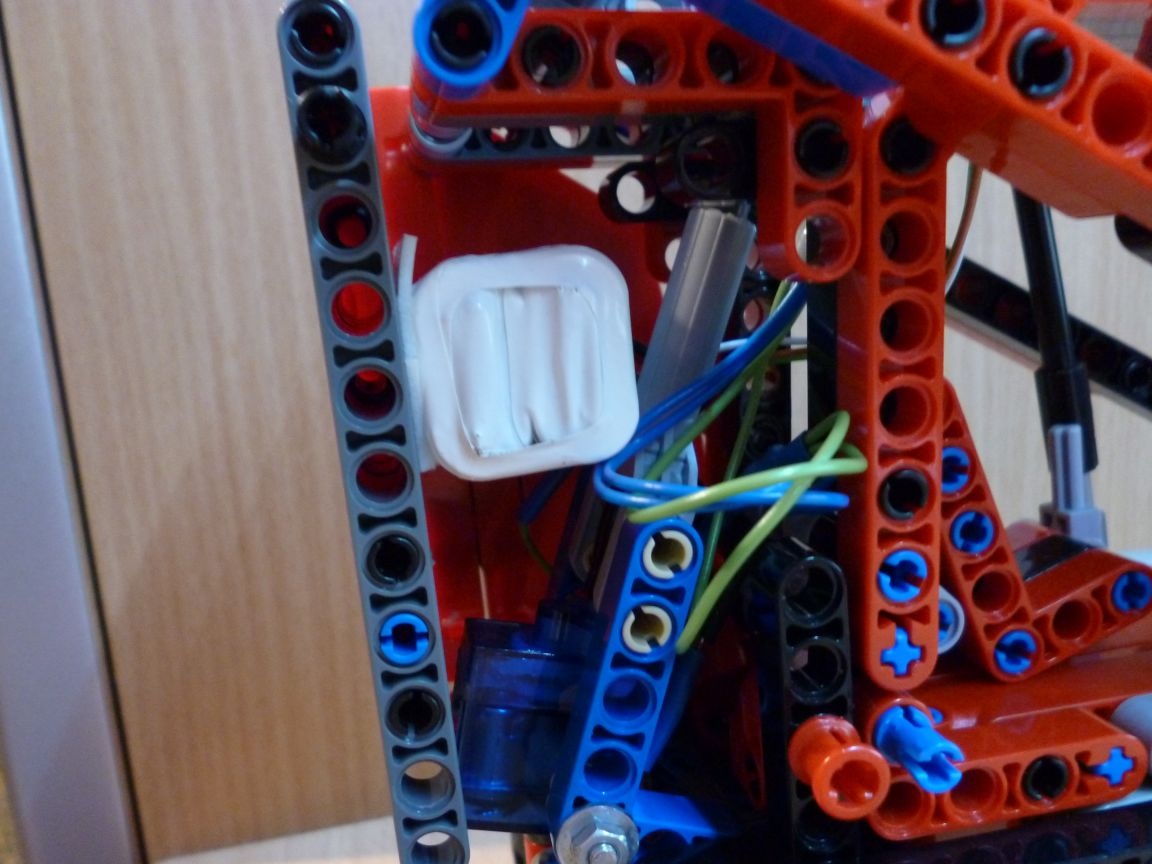
Paso 6 instalación de la cabina.
Conectamos el receptor IR, los motores y los diodos de acuerdo con el diagrama, colocamos la cabina en la parte superior del chasis, arreglamos el cucharón (se puede hacer cualquier cucharón):

Paso 7 firmware.
Estoy programando en un IDE Arduino. Primero debe completar mi firmware y, a través del terminal, ver los códigos de control remoto que va a utilizar. Puede tomar cualquier control remoto IR, por ejemplo, desde un televisor o reproductor de DVD. Al hacer clic en un botón en el terminal, veremos el código del botón presionado, escríbalo en una hoja de papel. Hacemos esto con todos los botones en los que queremos programar las acciones del cargador. A continuación, edite el boceto. Anotamos los códigos que registramos para las acciones necesarias en él y lo flasheamos nuevamente.
Firmware
Video del cargador: