
Hoy haremos una pequeña máquina controlada por radio, no solo una máquina, sino un verdadero dispositivo espía.
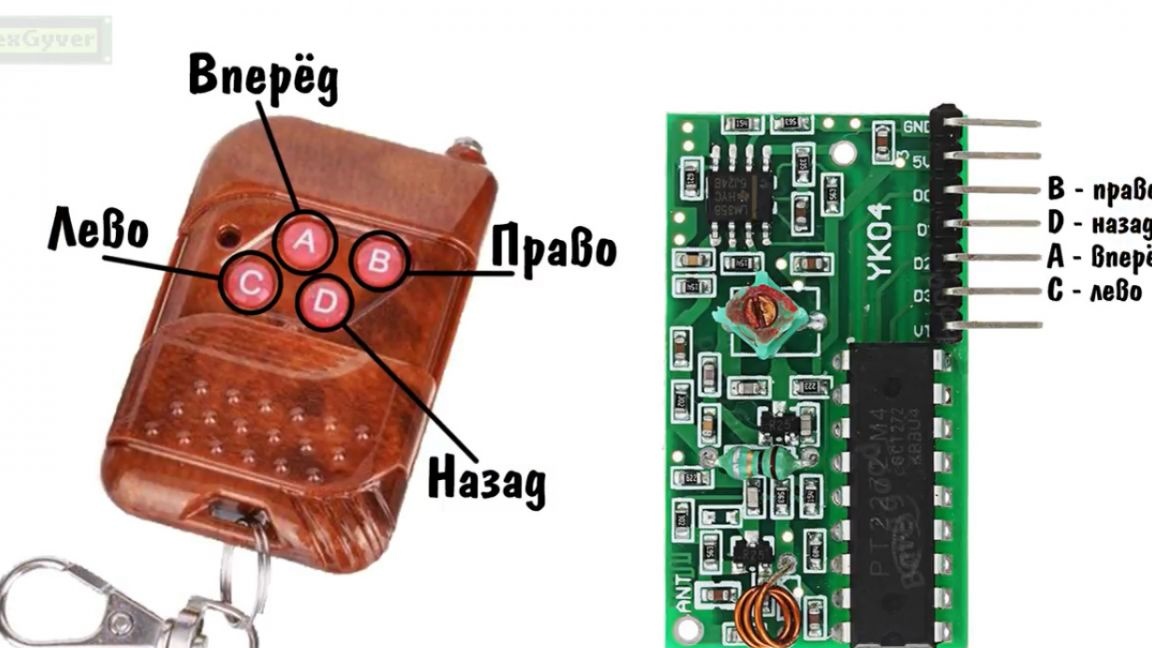
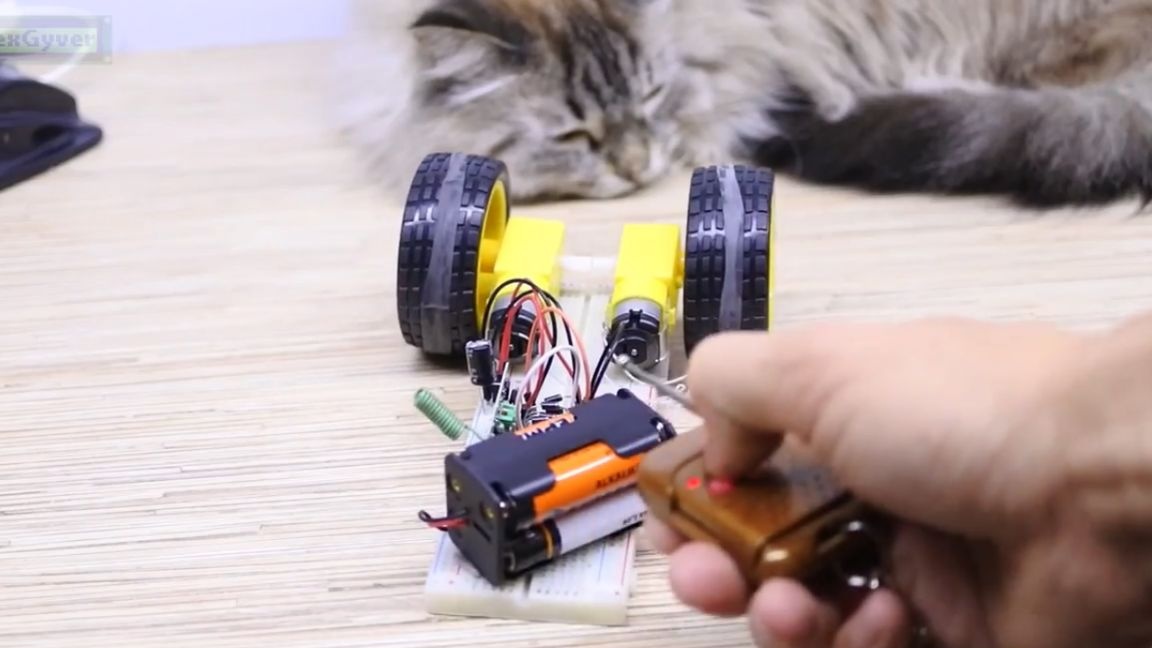
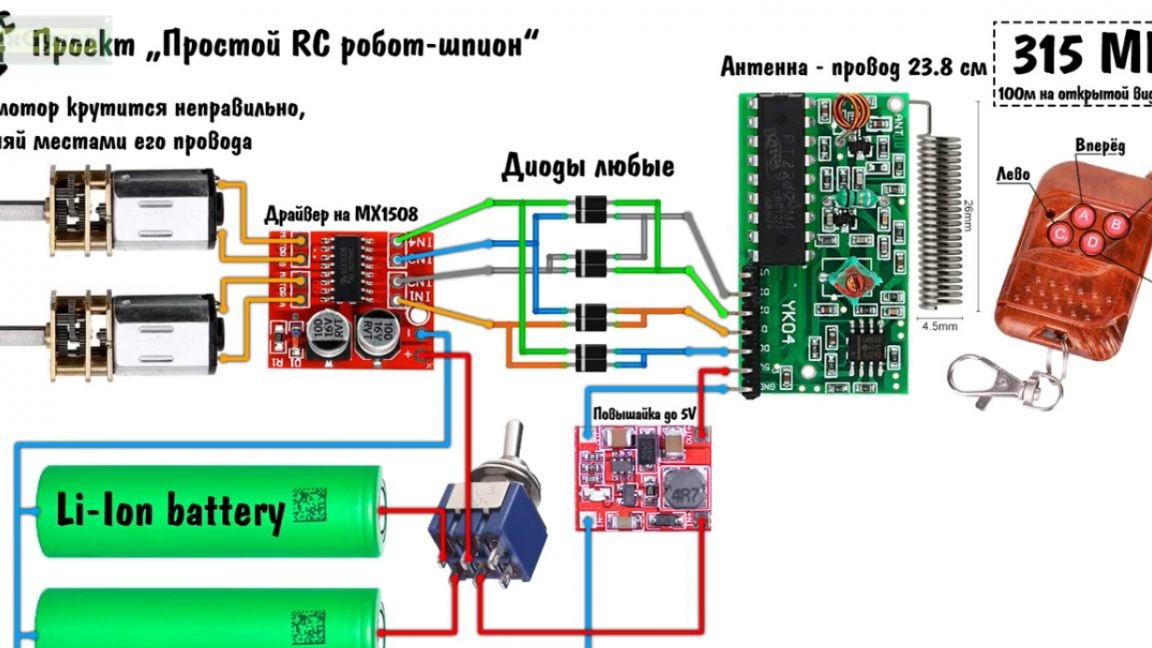
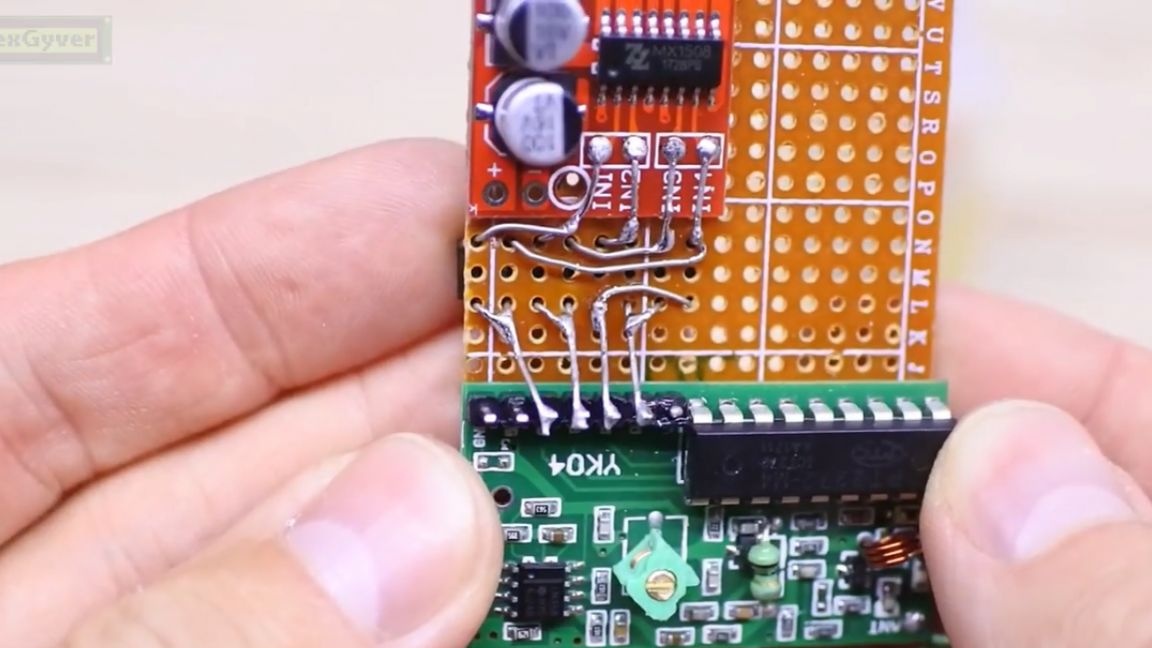
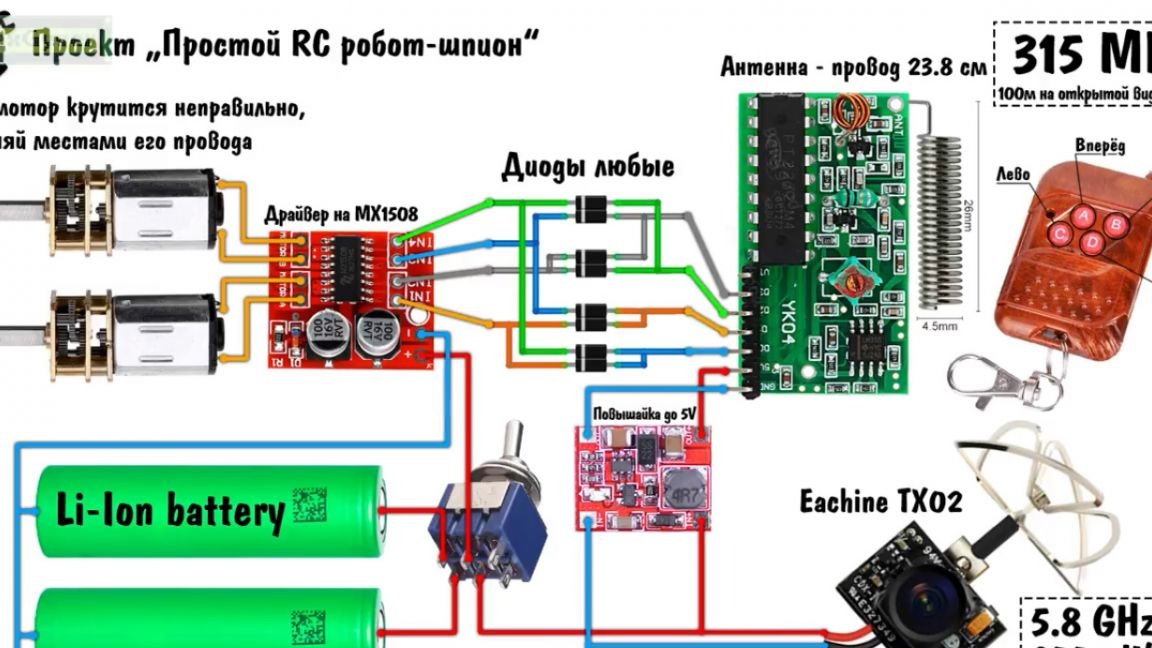
El autor de este producto casero es AlexGyver. Entonces comencemos. Mire, hay un módulo transmisor de 315 MHz en forma de control remoto de cuatro botones y un receptor con cuatro salidas lógicas para cada botón.
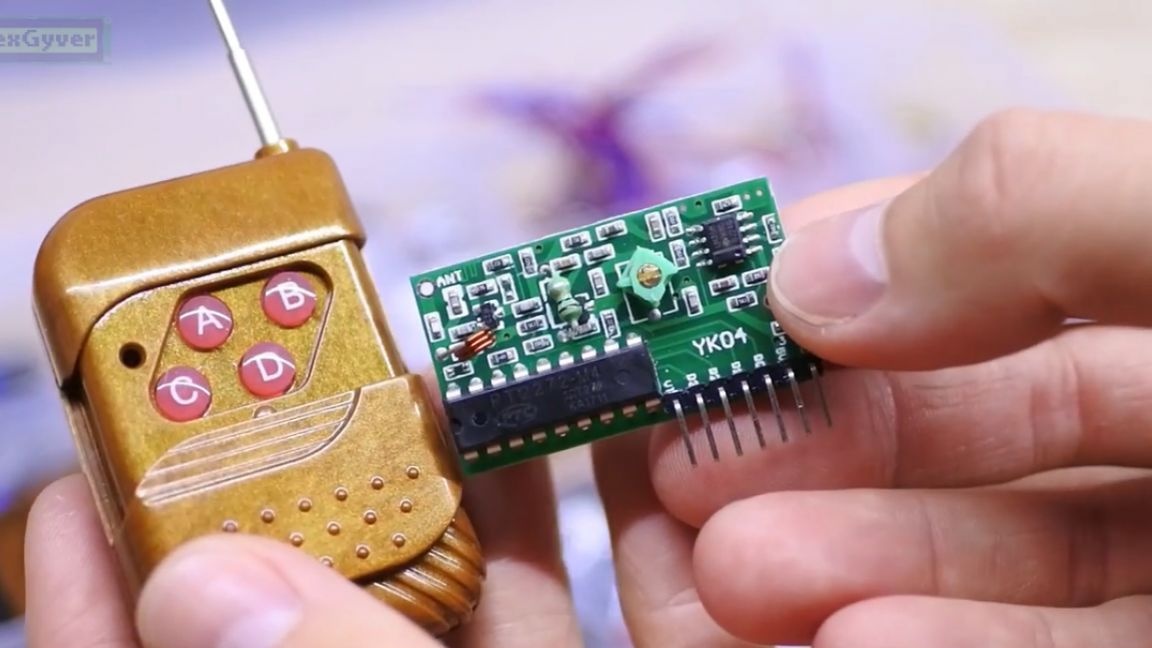

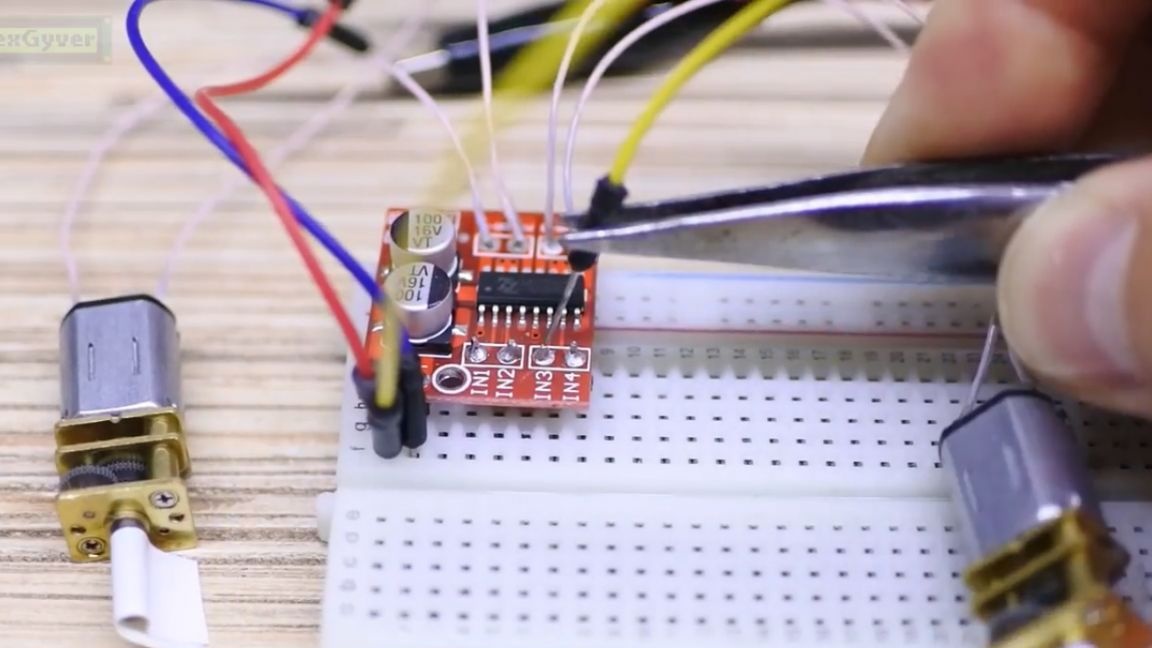
Todo esto funciona de una manera muy obvia: presionaron un botón de 5 voltios en la salida correspondiente. Ya buen potencial para arduino proyectos También hay un controlador para 2 motores en el chip mx1508.
Componentes para el robot (enlaces a Aliexpress):
FPV:

Este es un moderno casi análogo al viejo cojo l298. También es muy simple con él, conectamos 2 motores y los rotamos en una u otra dirección con una señal lógica.
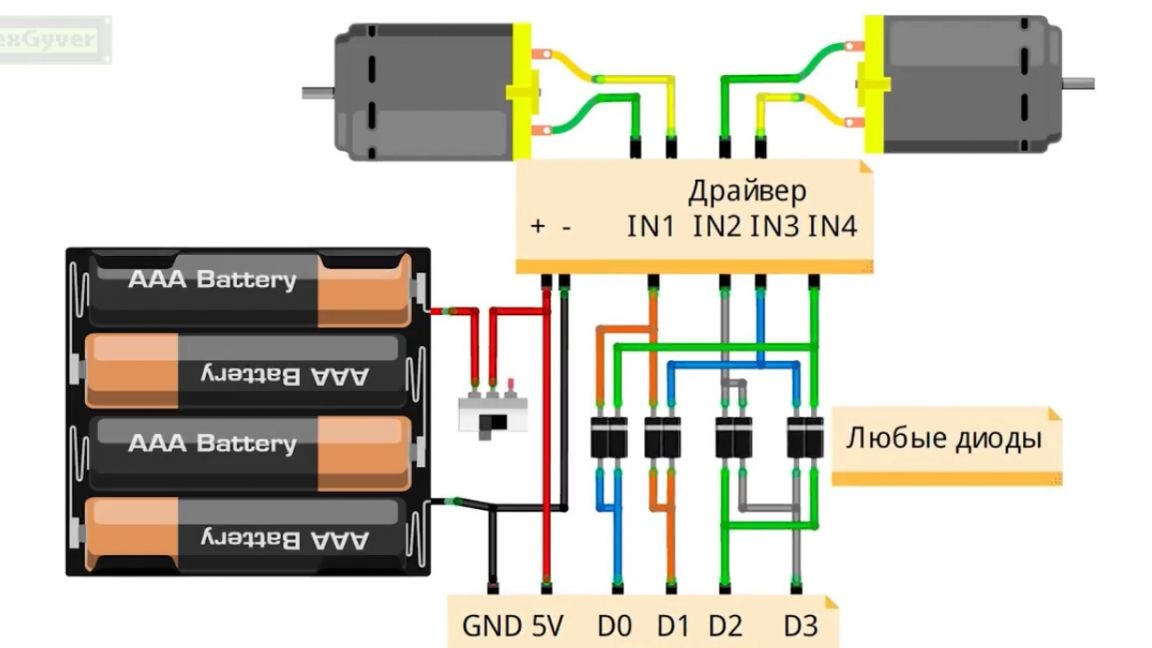
Y no hay nada más fácil que conectar estos 2 módulos y obtener el control de la máquina en un esquema de tanque. Solo queda descubrir cómo conectar el módulo receptor del controlador del motor para que los motores se enciendan como lo necesitemos, es decir, la lógica de la transmisión de la señal debería ser algo así, correspondiente a los botones del control remoto.
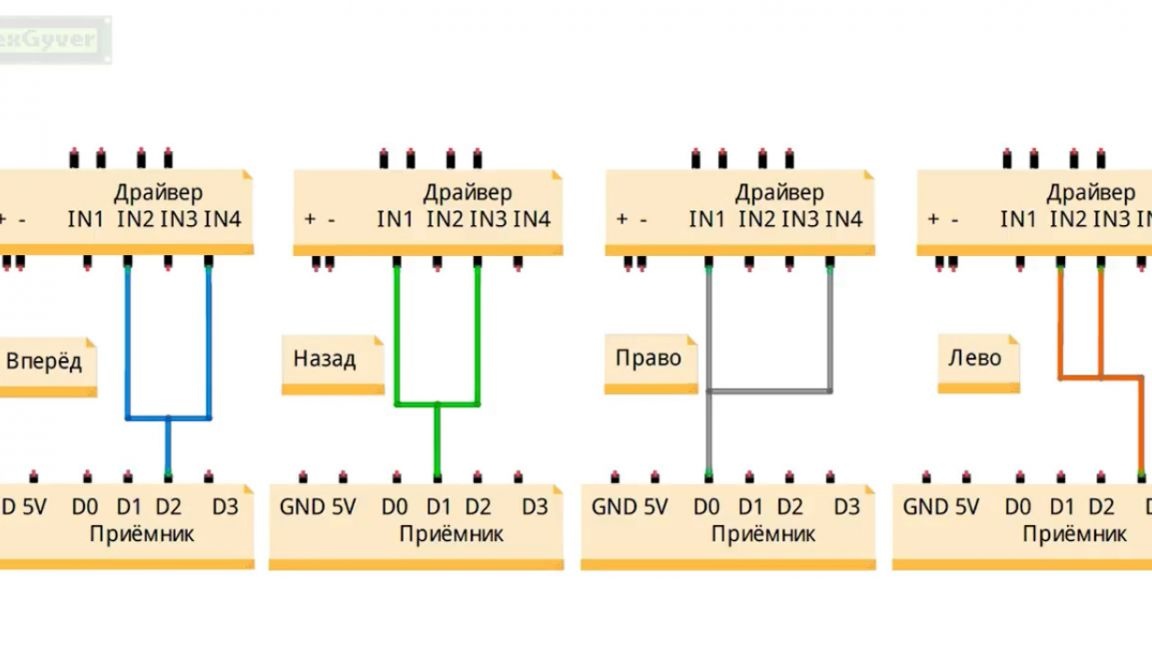
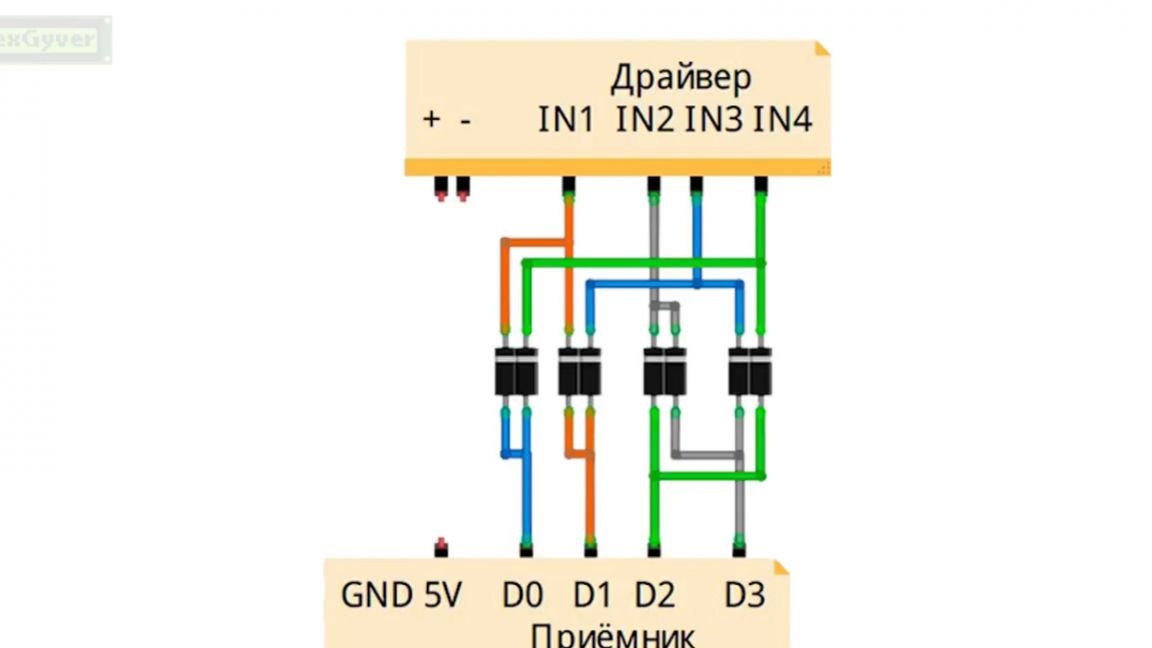
Los circuitos para canales funcionan bien por separado, pero quiero todo a la vez. Obviamente, es simplemente imposible tomar y conectar todos los cables tal cual, ya que los canales de control interferirán entre sí y los motores simplemente no girarán, si nada más se quema, por supuesto. Necesitamos proteger los canales de control de la influencia mutua y el circuito. Y luego los diodos ordinarios que pasan corriente en una sola dirección vendrán al rescate.

Y de esta forma, el circuito ya se puede combinar. Lo estamos optimizando ligeramente para que sea más compacto y tenga una mayor visibilidad, bueno, nos queda por conectar la alimentación, por ejemplo, de baterías y motores, podemos agregar un interruptor, pero desafortunadamente, resultó no ser tan simple.
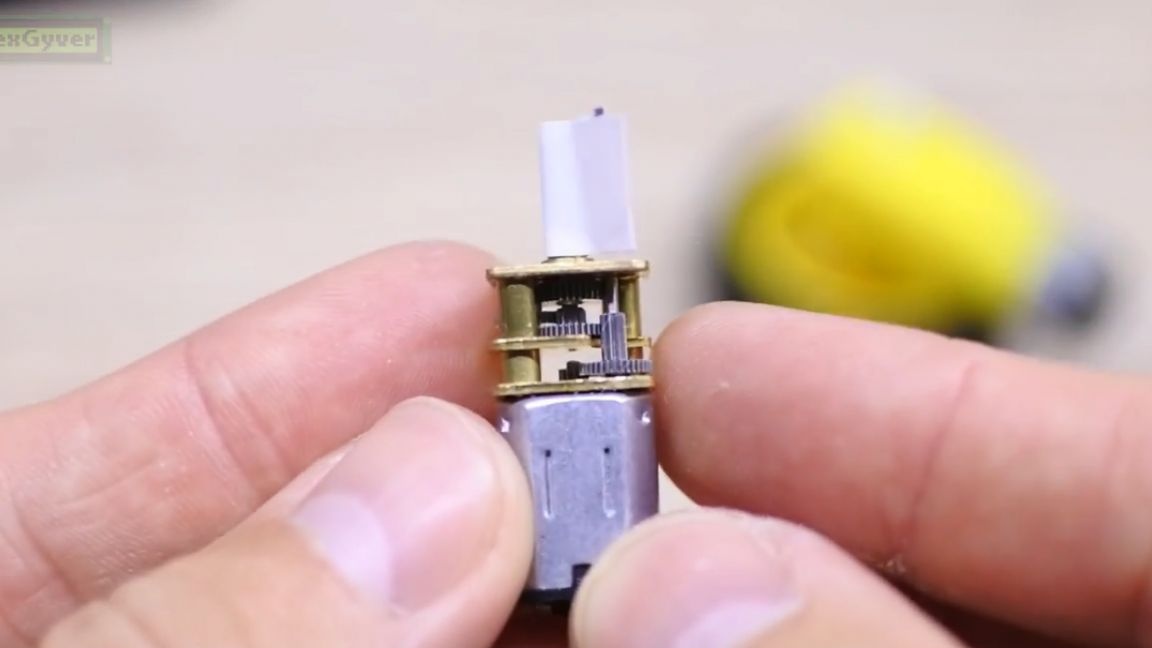
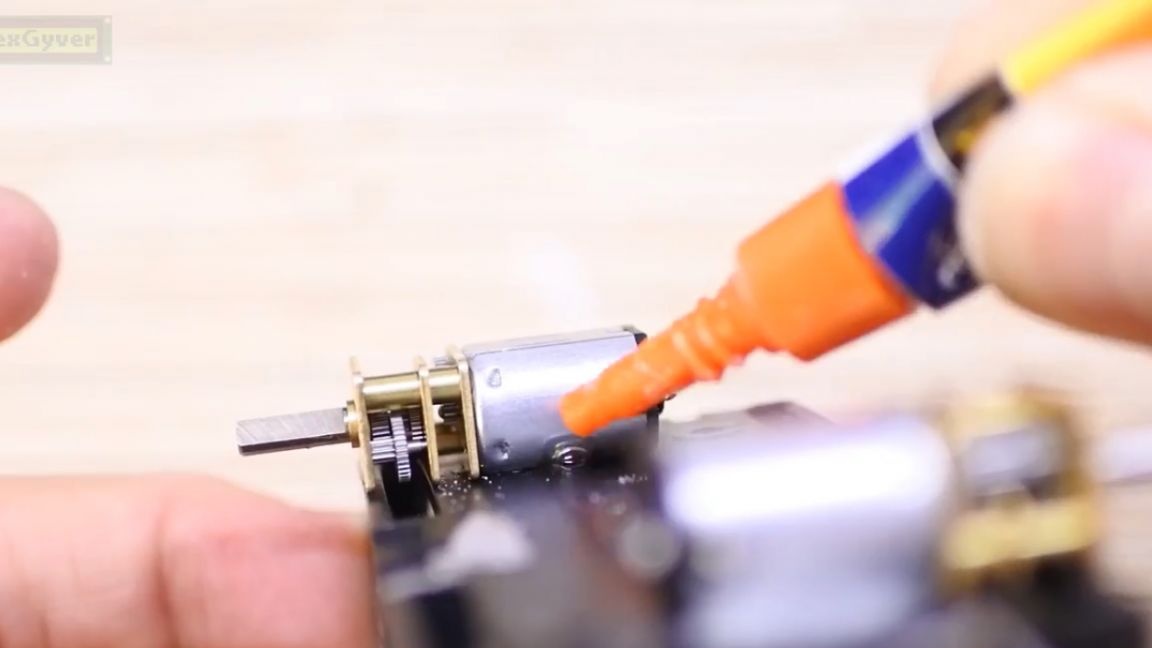
Los chinos tienen maravillosos motores de engranajes preparados para robots caseros. Se venden inmediatamente con ruedas. Y hay micro motorreductores, los usaremos ya que queremos hacer un mini robot espía.

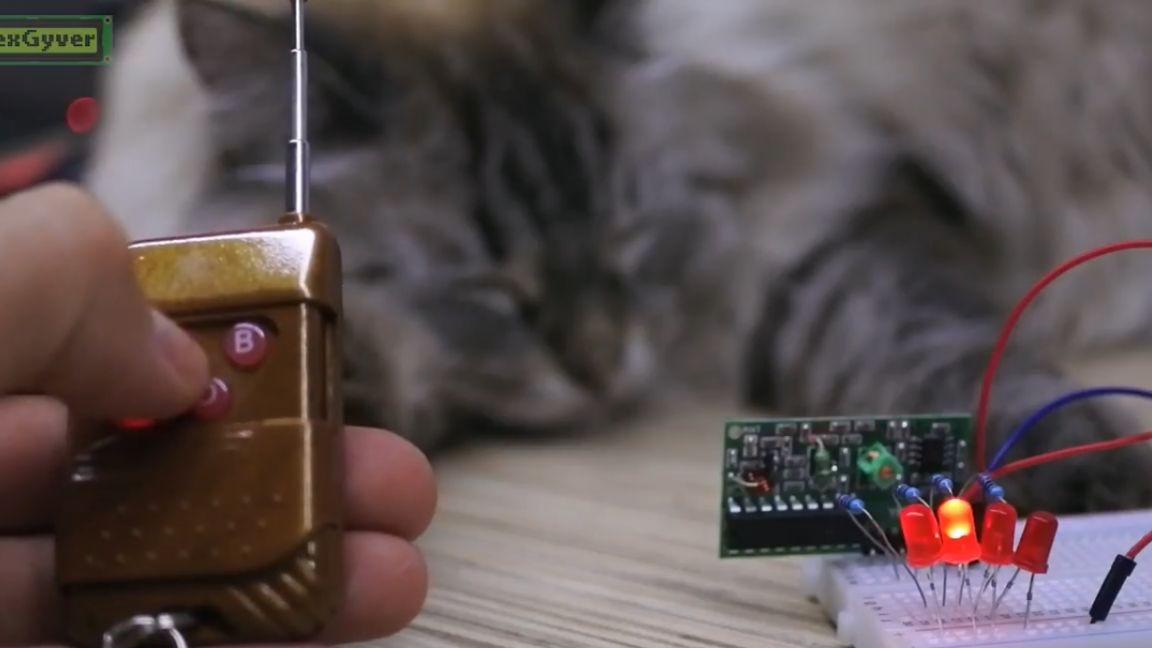
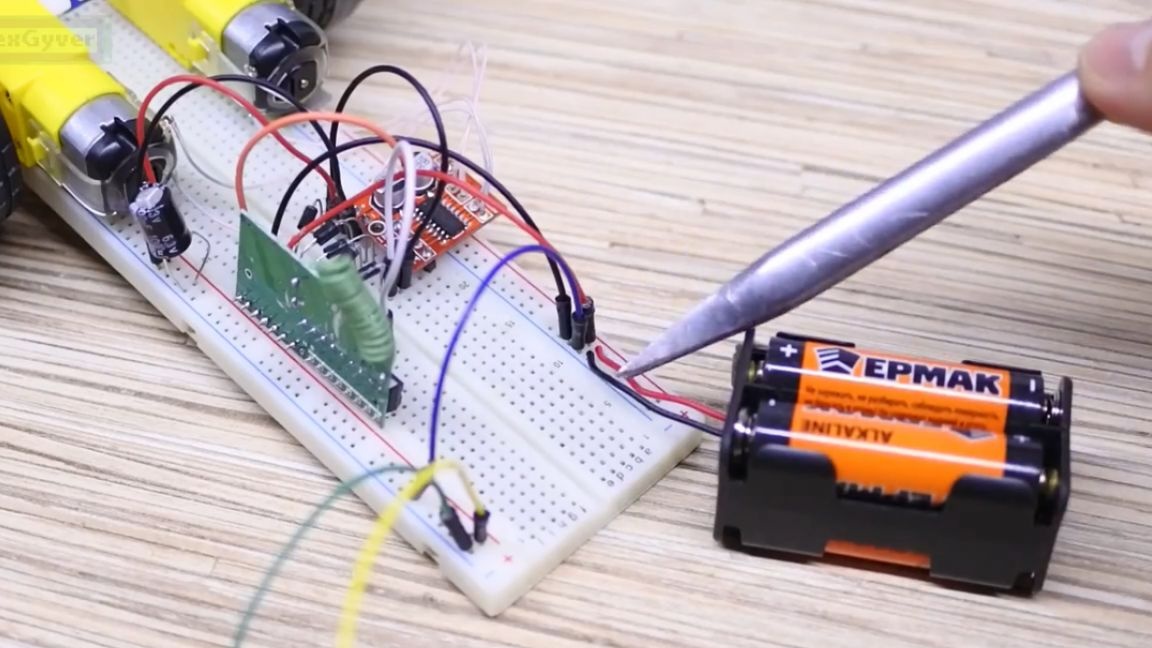
Pero para la primera prueba, soldemos motores grandes, y para la prueba ensamblaremos el circuito en una placa de pruebas. Tomamos diodos y conectamos todo de acuerdo con el esquema.
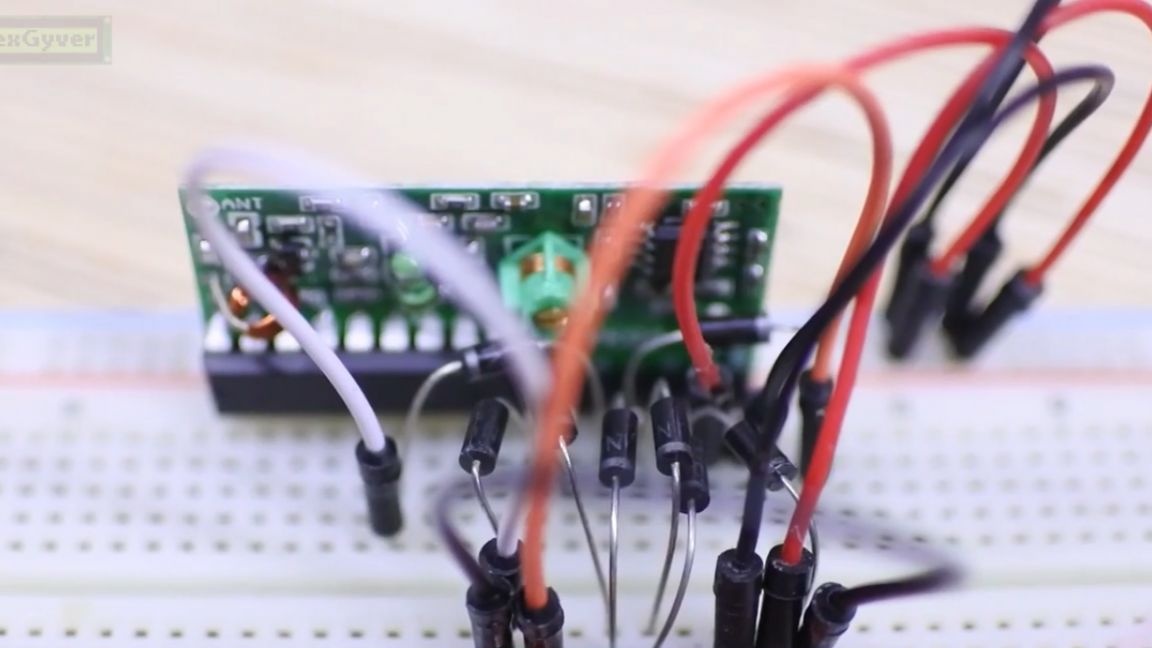
Bueno, algo por el estilo. Arreglamos las ruedas motrices a cinta de doble cara según el principio y lo hará: este es el mismo diseño.
Comeremos de 4 pilas de dedos. Inmediatamente tire de las llantas antideslizantes de los anillos de la cámara de la bicicleta. Vamos!

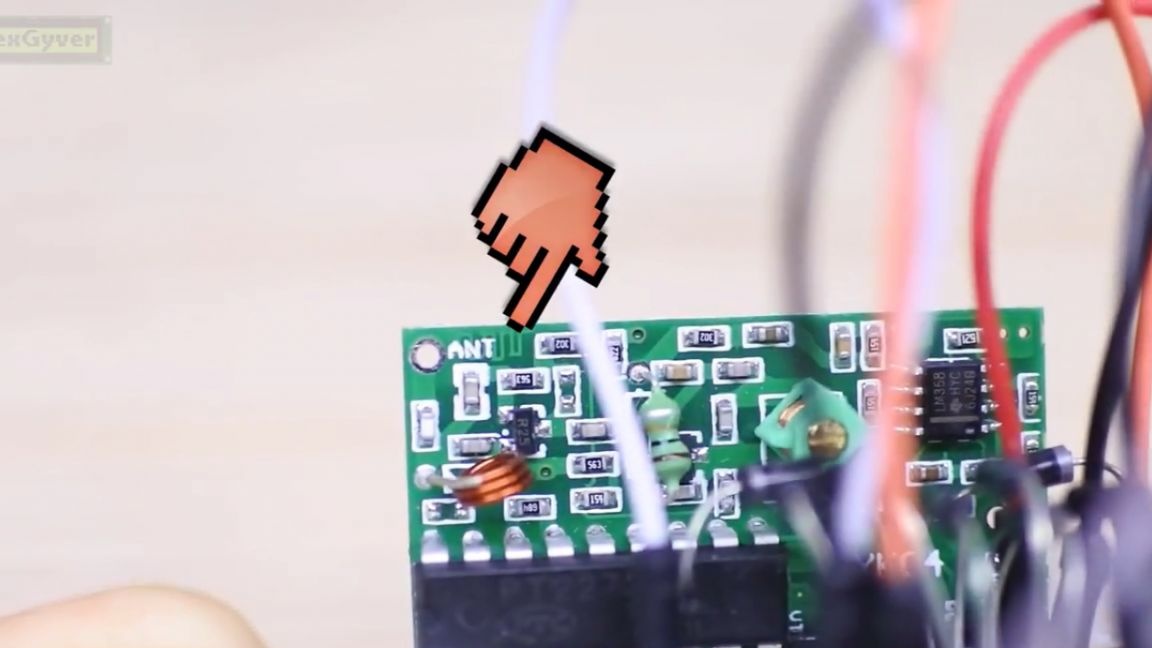
Pero los esquís no montan.Mientras mantiene presionado el botón, la máquina se mueve bruscamente, y en la prueba con LED vimos que la señal es constante sin sacudidas, es decir, por lógica, la máquina debe funcionar exactamente mientras se presiona el botón, pero por alguna razón esto no sucede. Vamos a hacerlo bien. Para empezar, los chinos soldaron la antena al transmisor y no soldaron al receptor. No, de hecho, la antena tiene la forma de una pista en el tablero:
Pero la antena es el caso cuando el tamaño sí importa. Hagamos nuestra antena. Para hacer esto, necesita un cable regular, por ejemplo, de un cable de Internet.

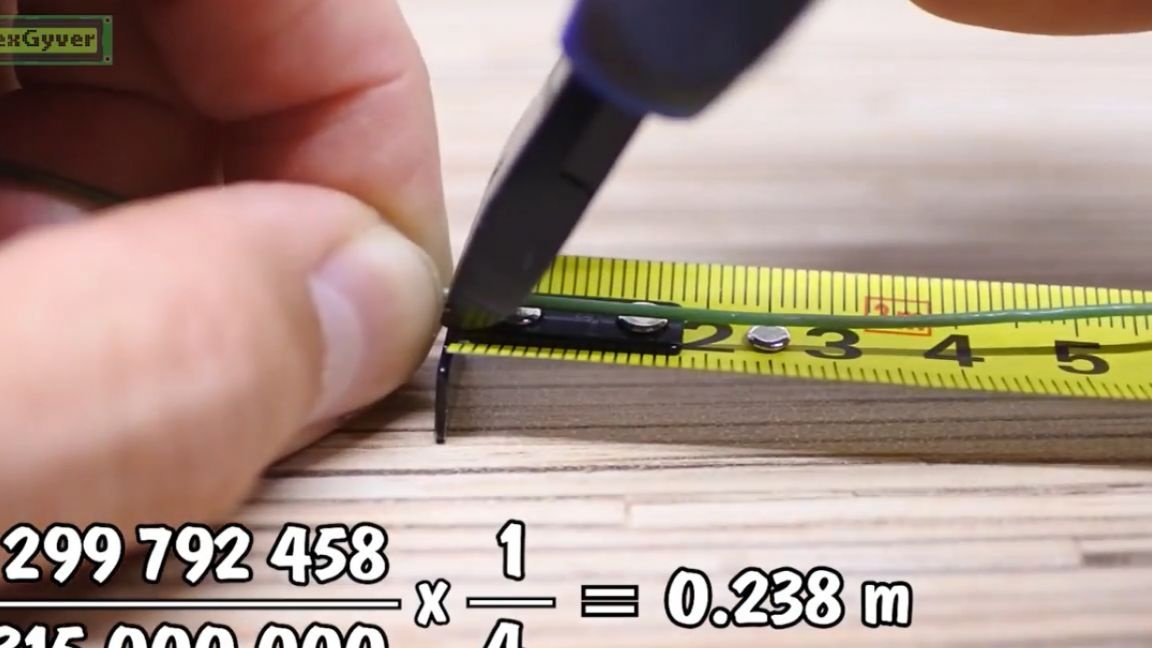
La longitud de la antena generalmente se toma igual a 1/4 de la longitud de onda, el llamado vibrador de cuarto de onda. La frecuencia de radio del módulo es de 315 MHz, traducimos la frecuencia a la longitud de onda de acuerdo con la fórmula de la escuela a través de la velocidad de la luz, se divide por 4 y resulta 23 con una cola de centímetro.
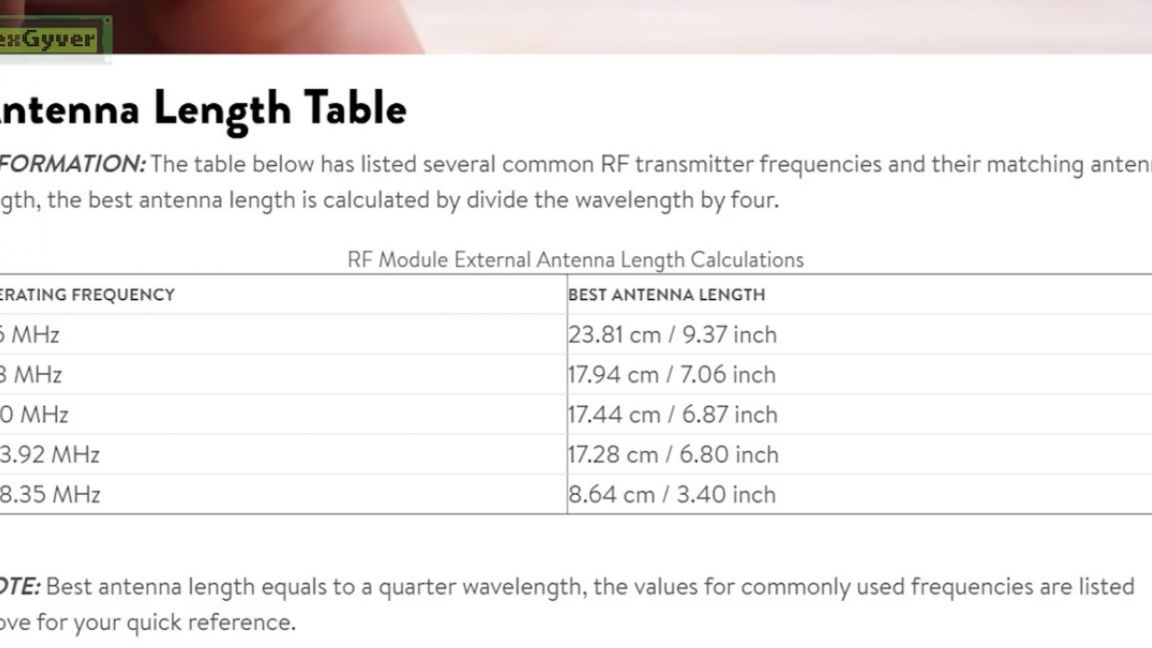
Aquí, por cierto, una tableta de Internet para diferentes frecuencias.
Como puede ver, estamos haciendo todo bien. Con tal antena, la nuestra el robot No será un espía, porque sobresaldrá un pedazo de alambre leonado demasiado largo.

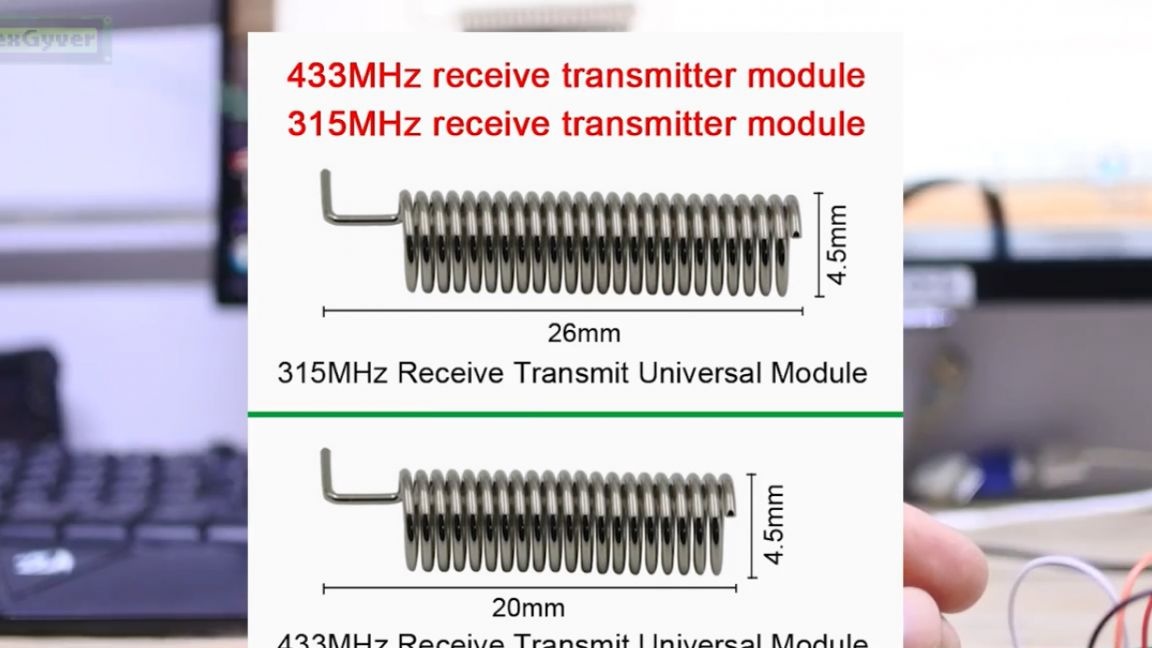
La antena se puede torcer en espiral. A juzgar por esta imagen de Internet, puede enrollarla en 4 mm.
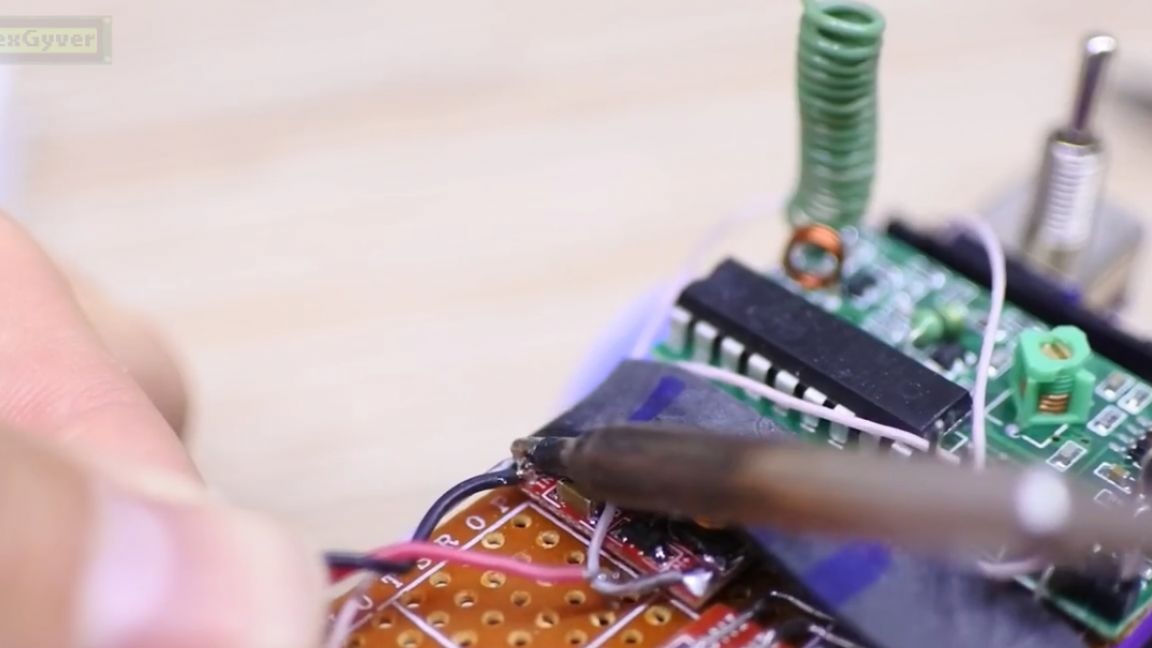
Tome un taladro del diámetro apropiado y envuelva nuestra antena sobre él, y luego suéldelo a la placa.
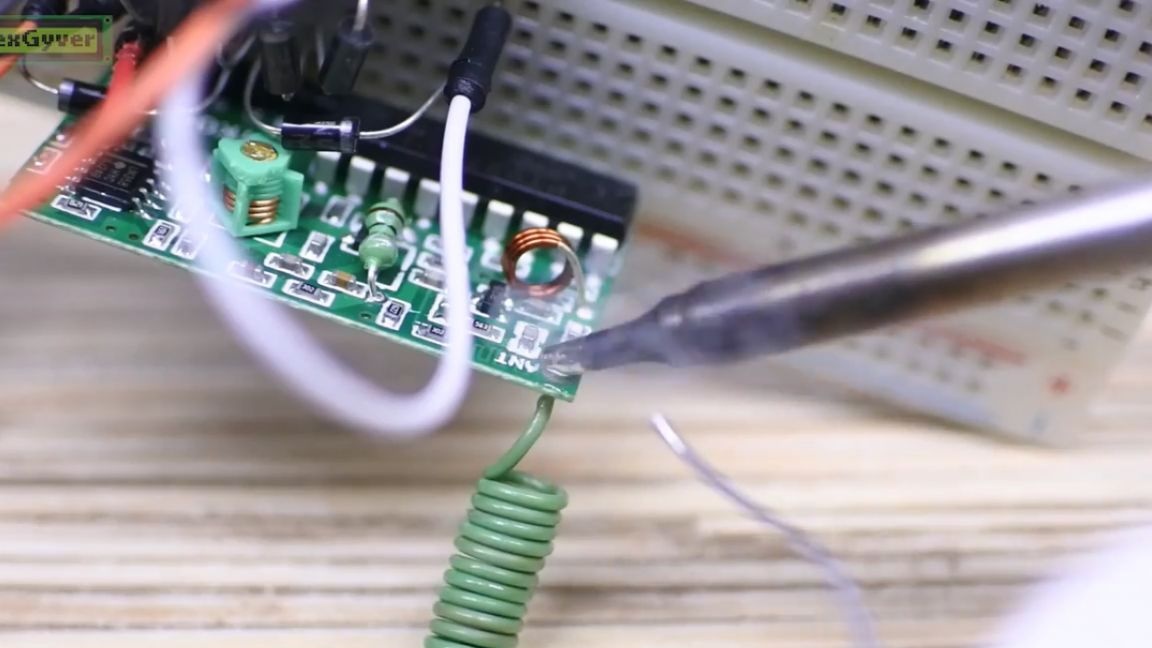
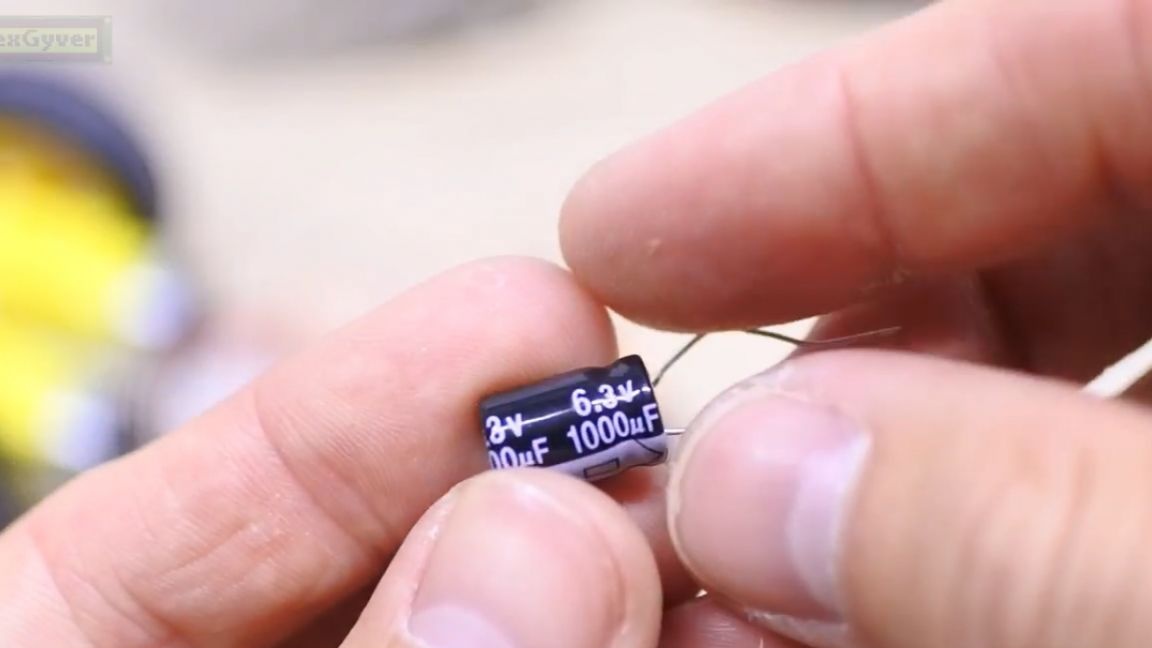
Para hacer frente a una alta corriente de arranque, un condensador nos ayudará en paralelo con la fuente de alimentación.
Lo comprobamos
Cerca de la antena, el circuito funciona de manera estable. Probablemente, el problema todavía está en la fuente de alimentación, hay interferencia de los motores, ya que cuando los motores y el receptor se alimentan por separado, el circuito funciona según lo previsto.
Agregue condensadores electrolíticos y cerámicos para suavizar los choques iniciales.
Pero aún así, no pasó nada. Haremos comidas separadas. Una batería de litio 18650 alimentada por motores y otra alimentada por una radio. También pondremos un convertidor de impulso de hasta 5V, porque la radio funciona desde 5V, la batería ya no funciona. Para encender la alimentación, tome un interruptor de doble palanca.
Todos estos componentes se venden en Aliexpress. Reconstruimos rápidamente el circuito y verificamos su rendimiento.



Y maldita sea, funciona. Su atención se presenta a la máquina casera más simple y barata con un control remoto. Sobre la potencia del módulo de radio, el autor todavía puso un par de condensadores. Funciona perfectamente
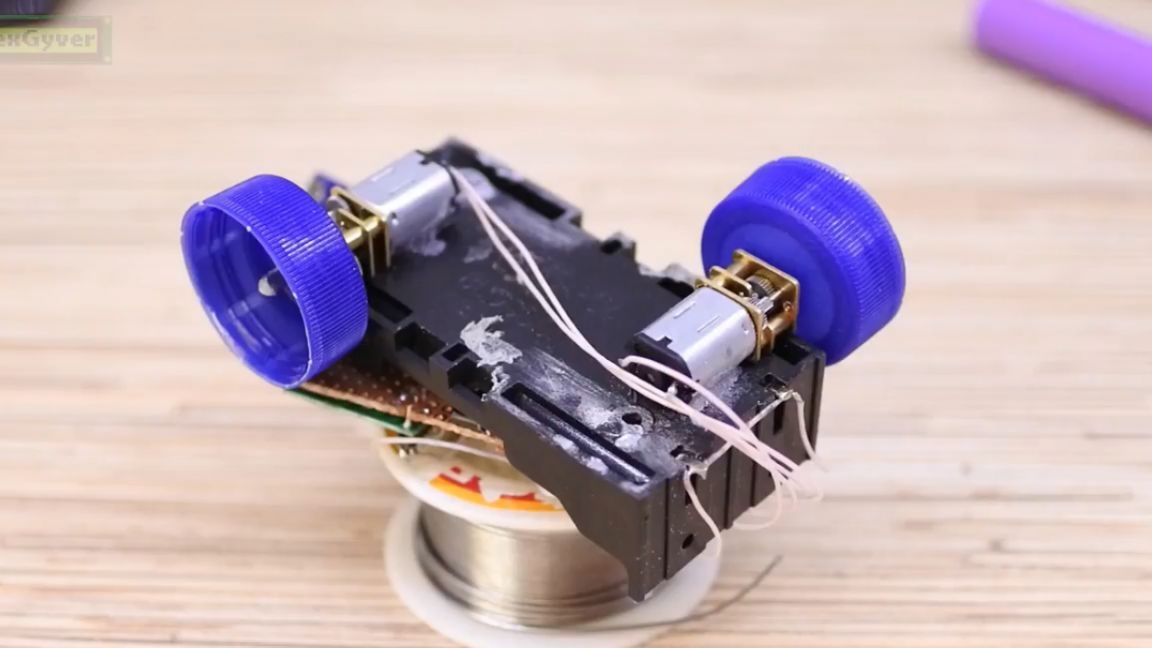
Nuestro robot se construirá sobre la base del compartimento de la batería y los motores pequeños. El circuito es exactamente el mismo que antes, pero por conveniencia lo ensamblaremos en una placa de pruebas.

Esta asamblea, en principio, es simple.
A continuación, lleve motores pequeños y péguelos al compartimento de la batería. Curamos el superpegamento con bicarbonato de sodio, se endurece inmediatamente y forma un polímero muy duradero, que se adhiere con mucha firmeza.

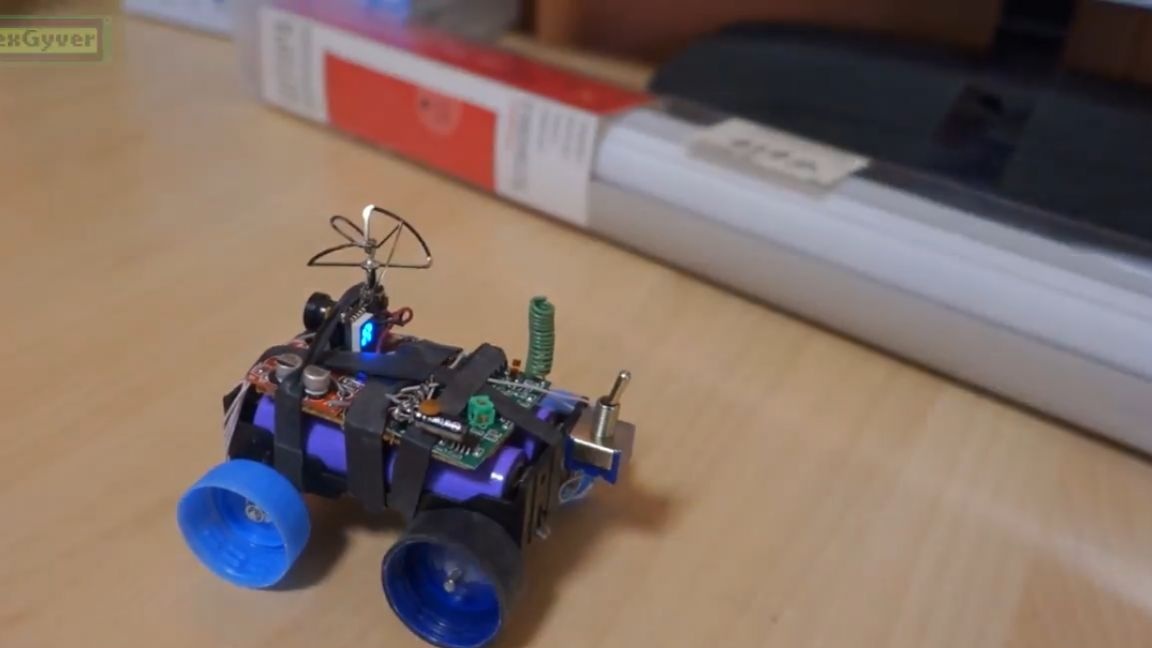
Las ruedas son tapas de botellas ordinarias.

Haremos las ruedas motrices en diagonal, será más compacto y la máquina girará mejor, pero superará los obstáculos.
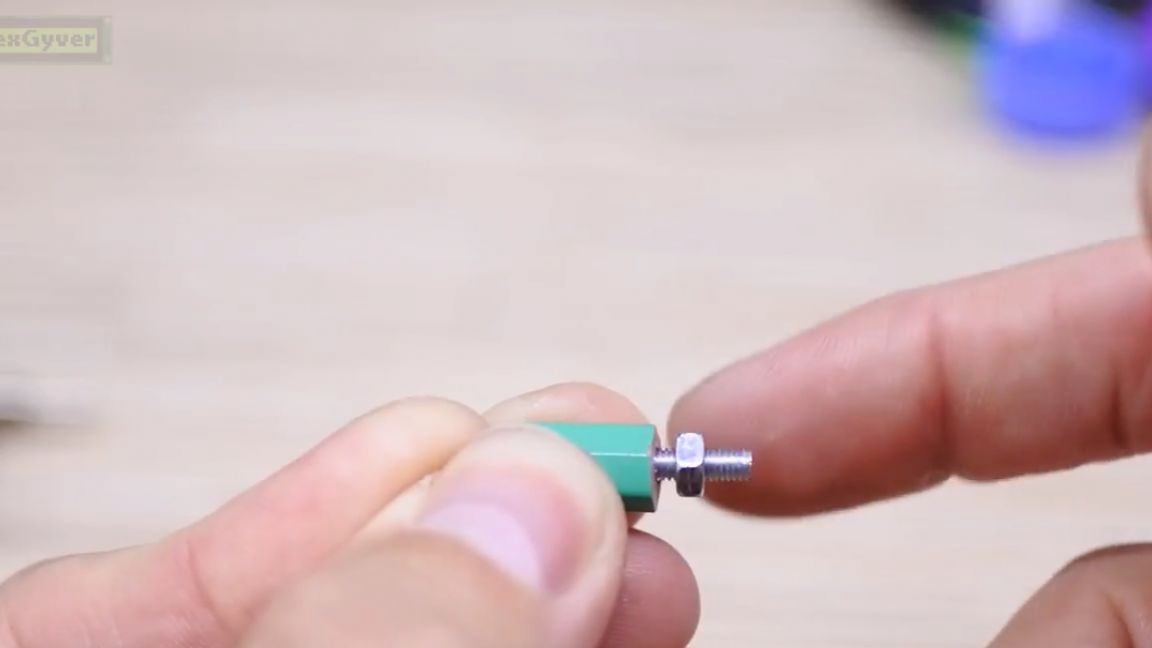
También necesitamos 2 ruedas más que simplemente giren. Sujételos en una manga con un lápiz, se ajusta bien en tamaño. El eje será del tornillo m3, por lo que perforamos un orificio de 3 mm, lo ensamblamos y lo pegamos en superpegamento.

Asegúrese de hacer neumáticos con la cámara de una bicicleta, de lo contrario no funcionará. Ponemos goma solo en las ruedas motrices de lo contrario, de nuevo, puede que no funcione.

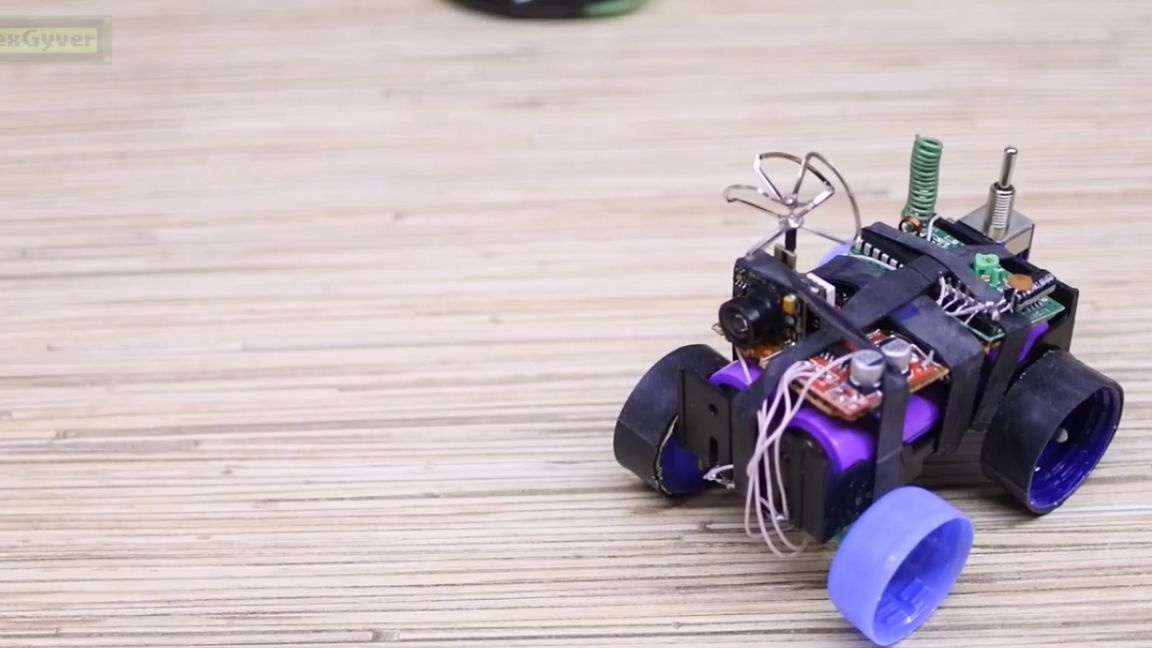
Bueno, ¿cómo está nuestra mini máquina espía sin una mini cámara? El autor tomó una mini cámara para un quadrocopter y Eachine tx-02 3 en 1 (cámara + transmisor + antena).
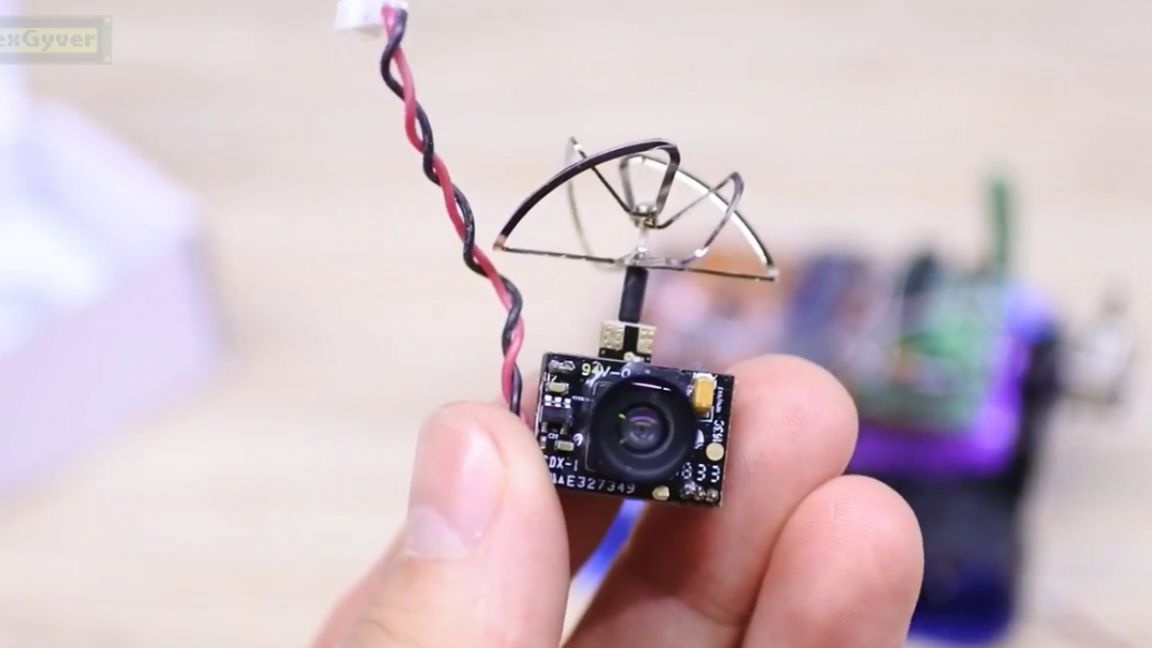
La cámara funciona con un voltaje de 3 a 5V y envía una señal de video a una frecuencia de 5.8 GHz. Lo alimentamos desde la batería desde la cual se alimenta el receptor del control remoto.
Por lo tanto, los motores no interferirán con la señal de video. Sujete a cinta de doble cara y banda de goma.

Puede recibir video en varios dispositivos chinos diferentes. Hay una pantalla tan genial con un receptor incorporado y una batería incorporada, también puede insertar una tarjeta de memoria y grabar en ella lo que lleva la cámara.
El autor, desafortunadamente, no tiene uno, pero la cosa es realmente genial y cómoda. La segunda opción es un poco más pequeña, pero lo que necesita para nuestro auto espía es directo.


Esta es una pequeña pantalla con un receptor y una batería, y no solo una pantalla, sino un reloj con una pantalla de 2 pulgadas. Las tablas de canales de enlace de video están codificadas en cuatro letras y ocho dígitos.
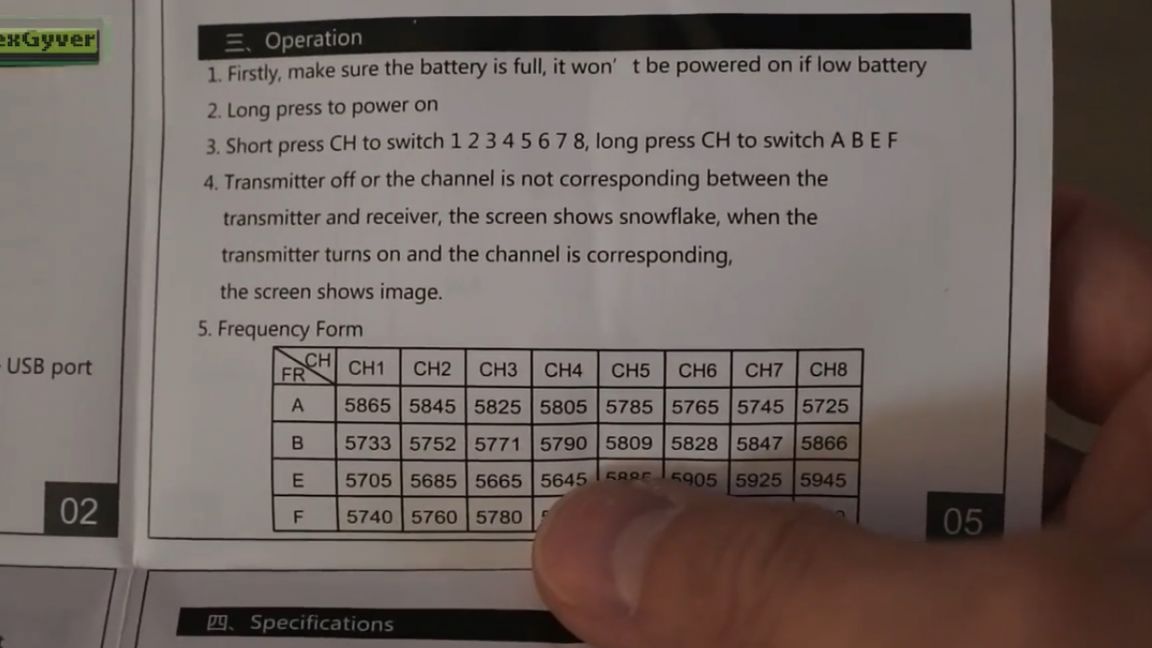
El canal debe coincidir en el transmisor y en el receptor.En el transmisor tenemos un canal con el número A8, puede cambiar el botón.

Y el reloj tiene una escala. Al hacer clic y mantener presionado el botón, puede establecer el número de canal A8.

Todo, hay un contacto. Puedes comenzar la vigilancia.

La tercera opción, en principio la más barata, es un receptor de este tipo para un teléfono inteligente, descargar un programa especial, abrir, conectar, habilitar, encender el transmisor de video, presionar y mantener presionado el botón del receptor y comienza el escaneo.


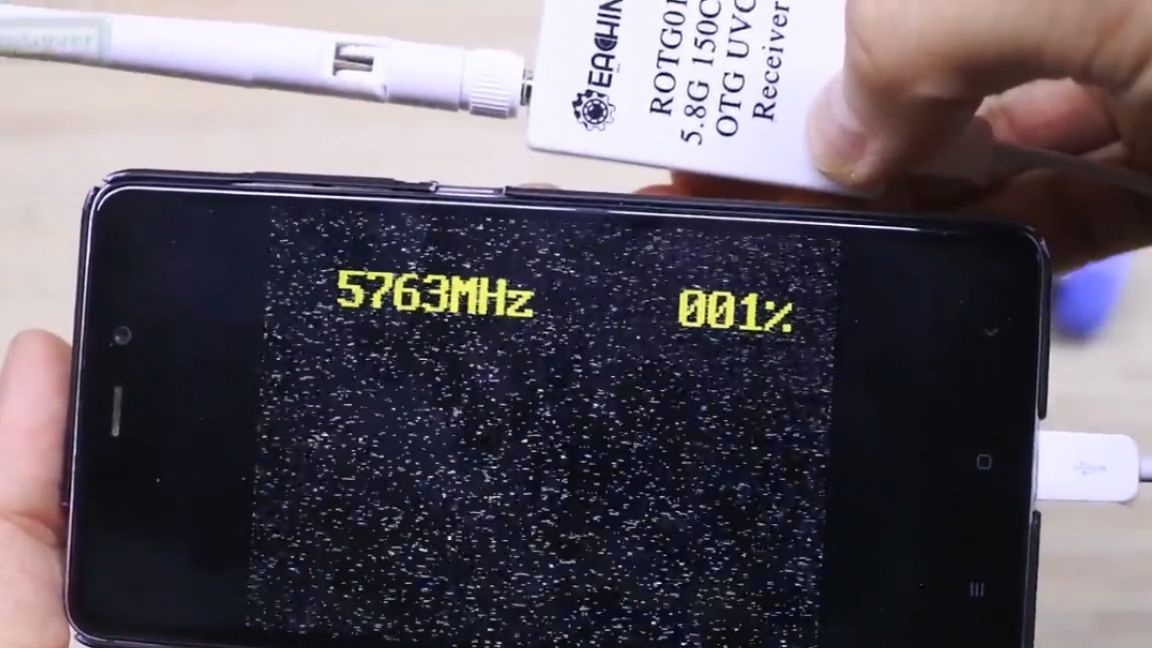
Después de eso, se seleccionará automáticamente la mejor frecuencia y podrá trabajar con nuestro sistema de videovigilancia.



Lo mejor es que puedes grabar videos directamente en la memoria del teléfono.

Eso es todo por hoy. Gracias por su atencion Hasta pronto!
Video: