Su paso es muy similar a una cucaracha real. Al caminar, se balancea un poco, avanzando con confianza. La cucaracha tiene un mínimo de piezas complejas y es muy fácil de fabricar.
1.prueba de video
El video muestra una cucaracha mecánica desde diferentes ángulos durante su operación y movimiento.
2. Características y características.
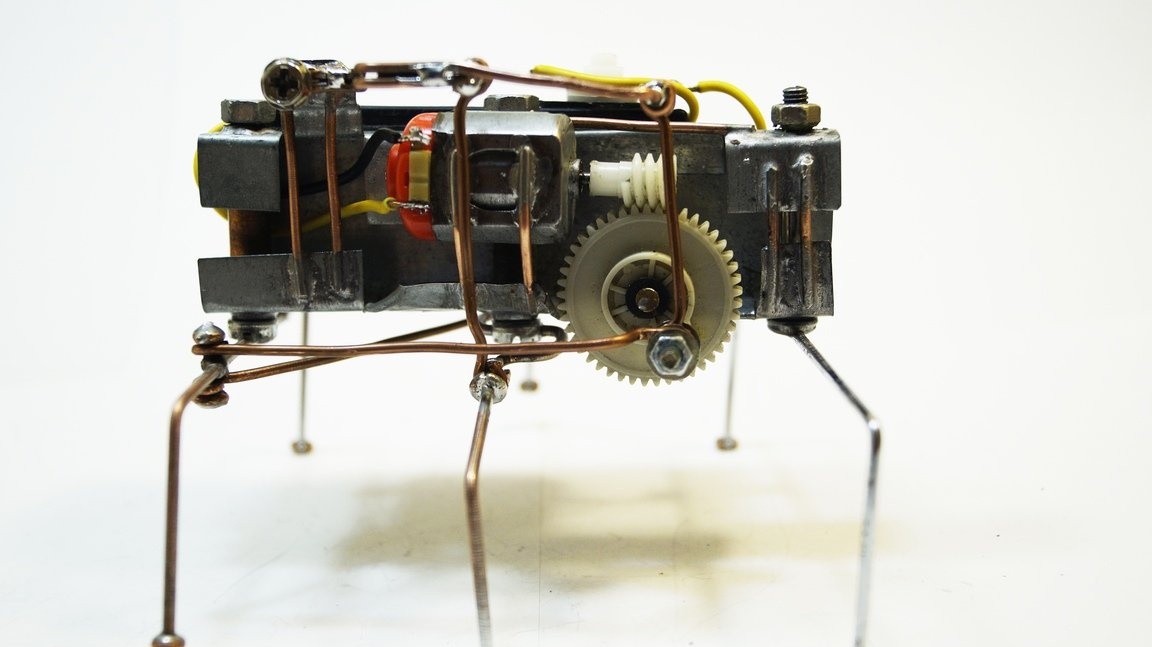
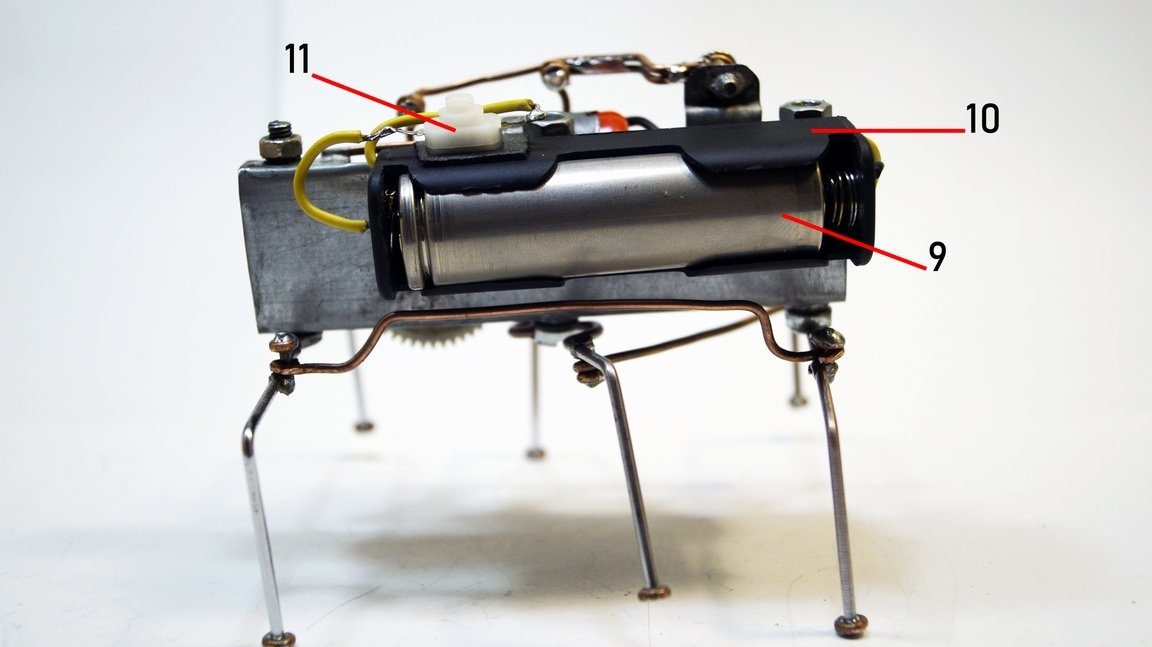
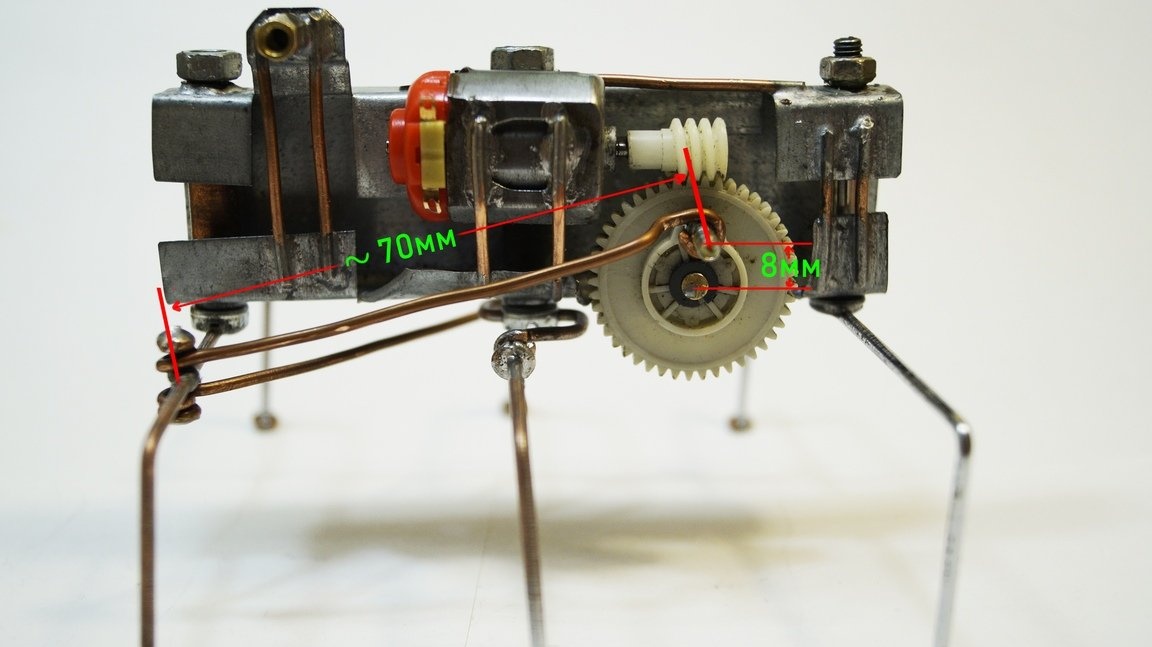
En una foto 1. Se muestra la cucaracha mecánica, vista lateral. En una foto 2. Se muestra la vista superior.
Foto 1.
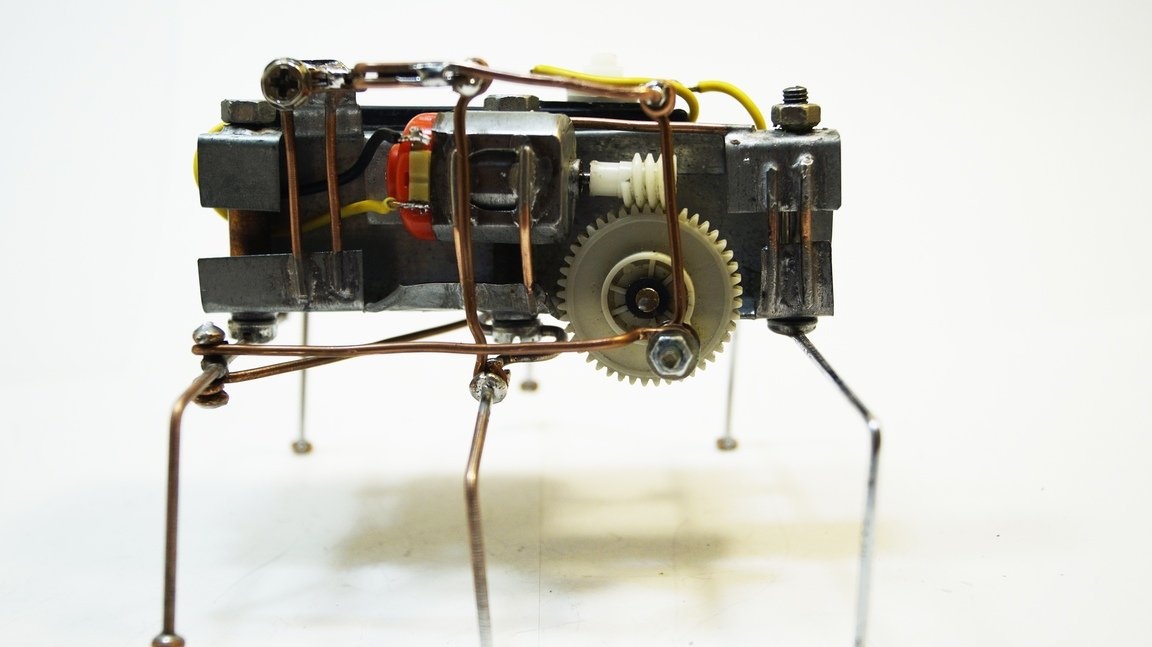
Foto 2.
DISEÑO Como marco, se utilizó el perfil ppn-2 30X20. El motor y otras juntas se montaron mediante soldadura. Las patas de una cucaracha están unidas con pernos M6. El botón de encendido y el compartimento de la batería están pegados a una cinta de doble cara. Como tracción para conducir las patas de una cucaracha, se usó un cable de cobre con una sección de 2.5 mm.
MOTOR Y CIGÜEÑALES. El motor y el eje del cigüeñal se sueldan al bastidor en POS-61, soldando ácido ZnCl (cloruro de zinc). Para aumentar el par y reducir el tamaño, se utilizó un engranaje helicoidal.
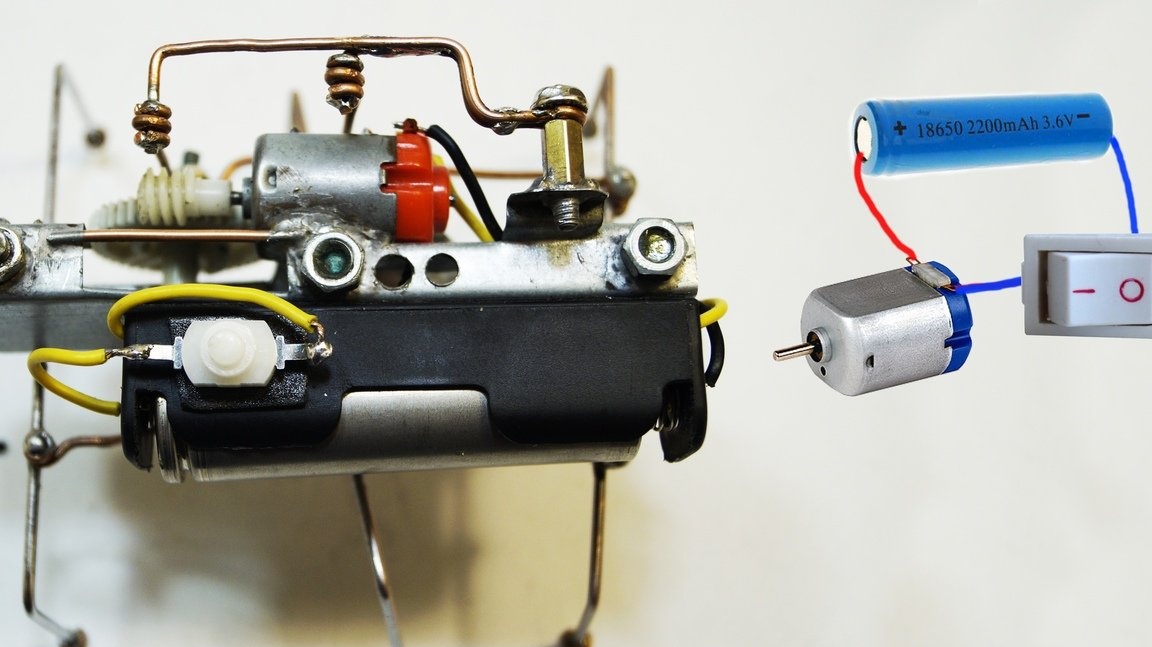
NUTRICION Se utilizó una batería 18650 como la potencia del robot. La fuente de alimentación es 3.7V.
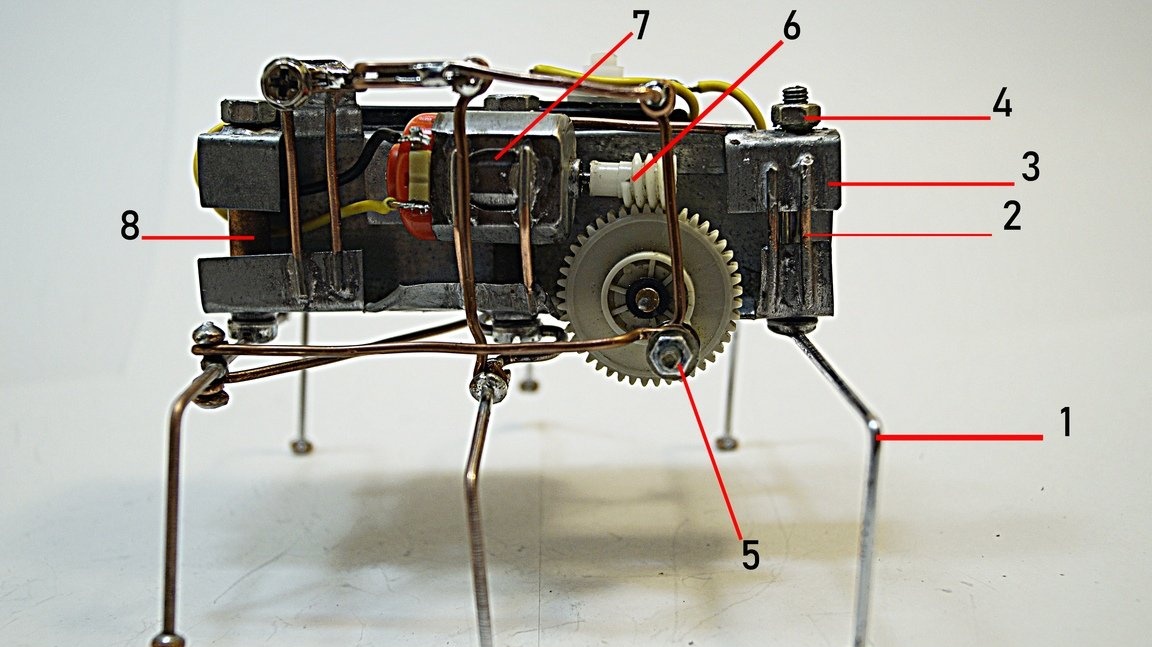
DETALLES DE DISEÑO DE ROBOT
1. Patas de una cucaracha.
2. El refuerzo.
3. El marco.
4. El eje de las patas de una cucaracha.
5. Mecanismo de manivela.
6. Impulsión de gusanos.
7. Motor eléctrico F130 5 V.
8. El eje de la manga de las patas de la cucaracha.
9. Tipo de batería 18650, 3.7 V.
10. Compartimento de la batería.
11. Botón de encendido.
3. El principio del trabajo.
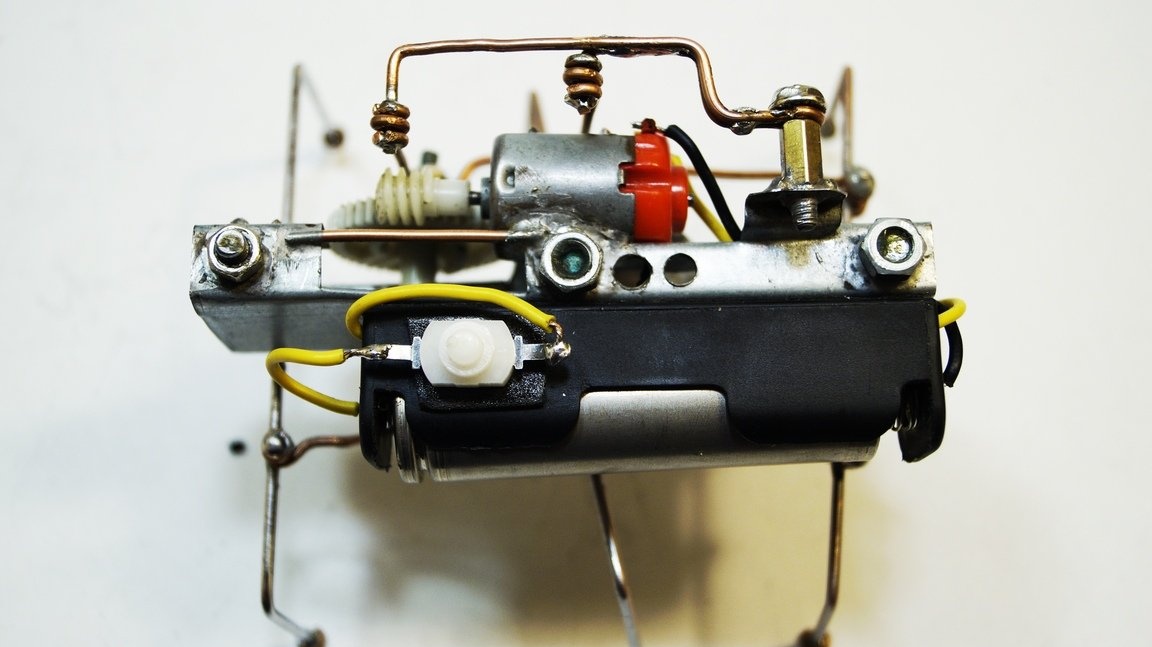
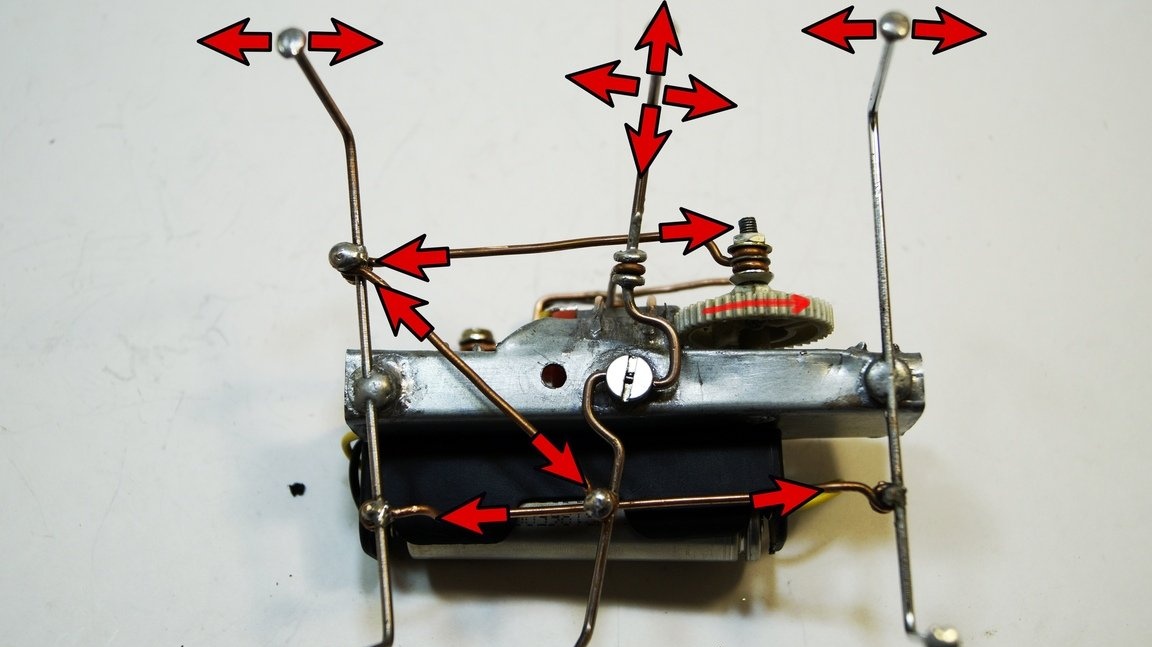
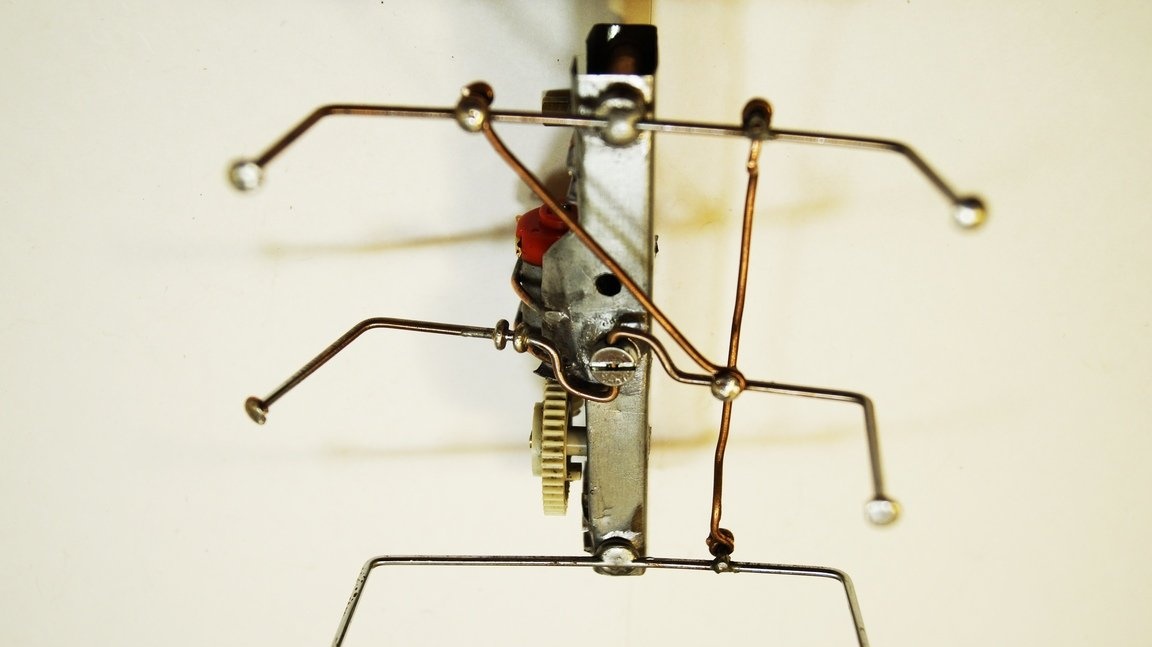
En una foto 3. 4. Se muestra el principio de trabajo de las partes mecánicas de una cucaracha. Vale la pena recordar que las patas delanteras y traseras del robot se mueven horizontalmente, y las patas medias se mueven vertical y horizontalmente.
La energía se suministra al motor eléctrico a través de la llave, el motor gira el mecanismo de manivela. La manivela impulsa la pata delantera a través de la tracción, respectivamente, desde la pata delantera, el empuje empuja la pata trasera (se mueven sincrónicamente). El par medio de patas está conectado al primer par, en sentido transversal (se mueven en antifase).
Para mover el par medio de patas verticalmente, se monta una palanca sobre el motor, que se pone en movimiento desde el mecanismo de manivela.
Foto 3
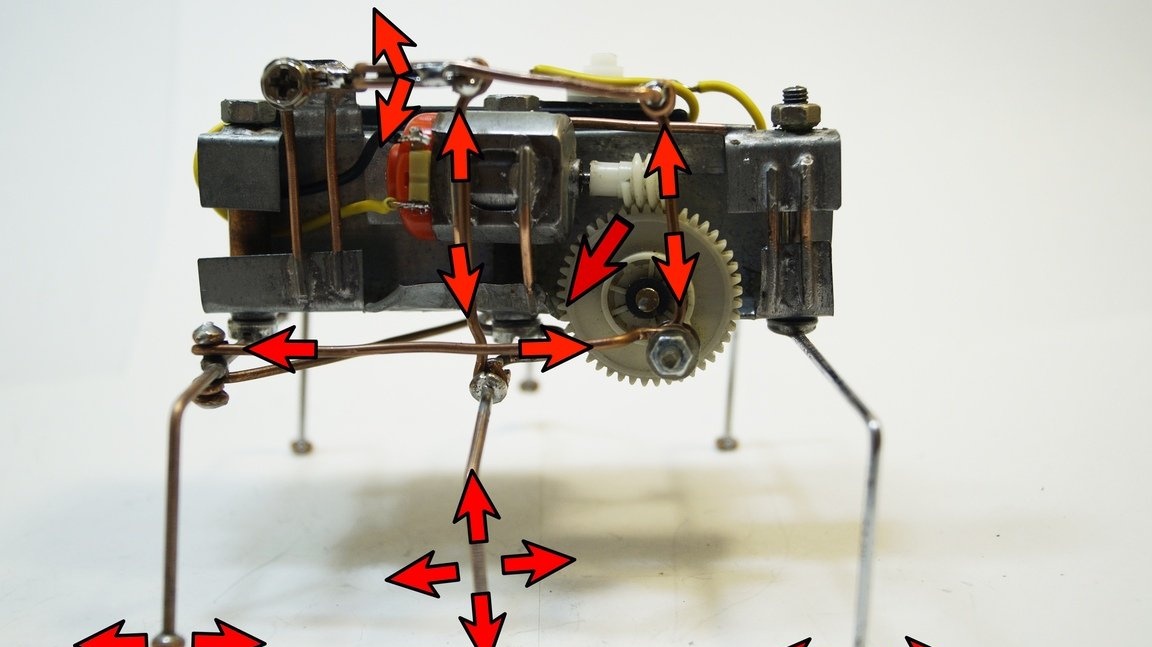
Foto 4
4. Materiales y herramientas.
1.Soldador de hierro 50W.
2. Compartimento de la batería.
3.Prysoy POS-61.
4. Un alambre de cobre con una sección de 2.5 mm.
5. ZnCl ácido de soldadura (cloruro de zinc)
6. Motor eléctrico F130 5V.
7. Tijeras para metal.
8. Impulsión de gusanos.
9. Alicates.
10. Tubo de acero, diámetro 80 mm.
11. Batería recargable 18650.
12.Perfil PPN-2 30X20.
Y también: (botón de encendido, cinta de doble cara, cable de montaje)

5. Instrucciones de montaje.
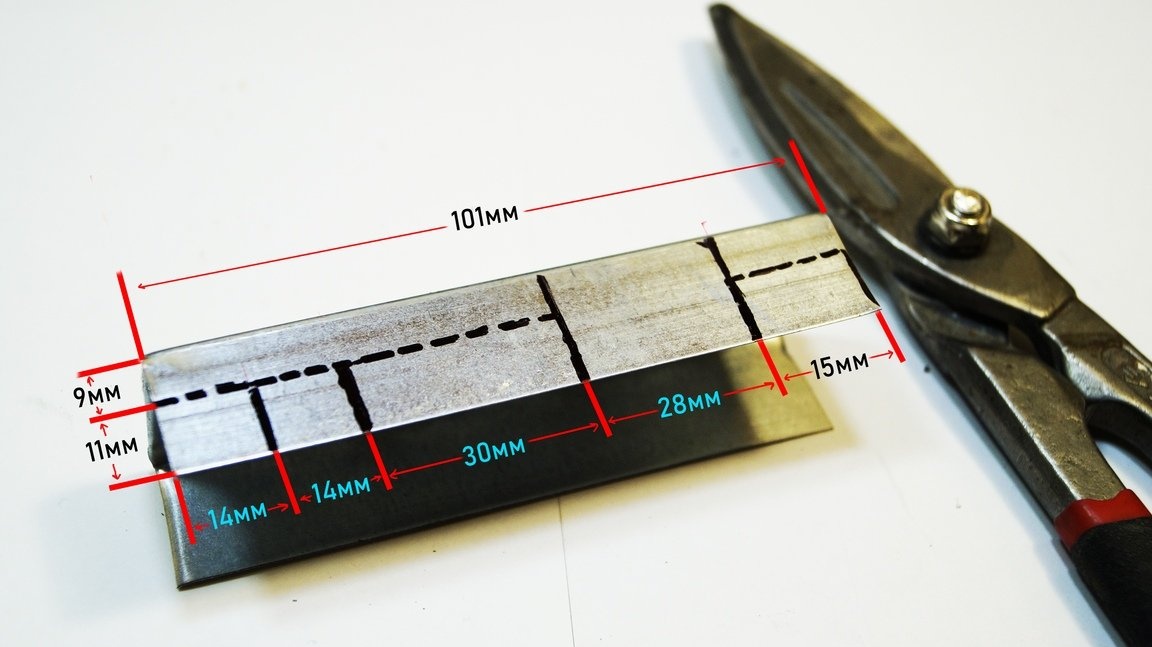
1.Haciendo un marco de cucaracha.
Dibuje el marcado en el perfil como se indica en la Foto 5.
Foto 5.
Con unas tijeras para metal, cortamos y doblamos la pieza de trabajo con unos alicates como se muestra en la foto 6. Marque la parte inferior como se indica en la foto 6. Doble el perfil con unos alicates como en la foto 7.
Foto 6.
Foto 7.
2. Motor eléctrico y eje de manivela.
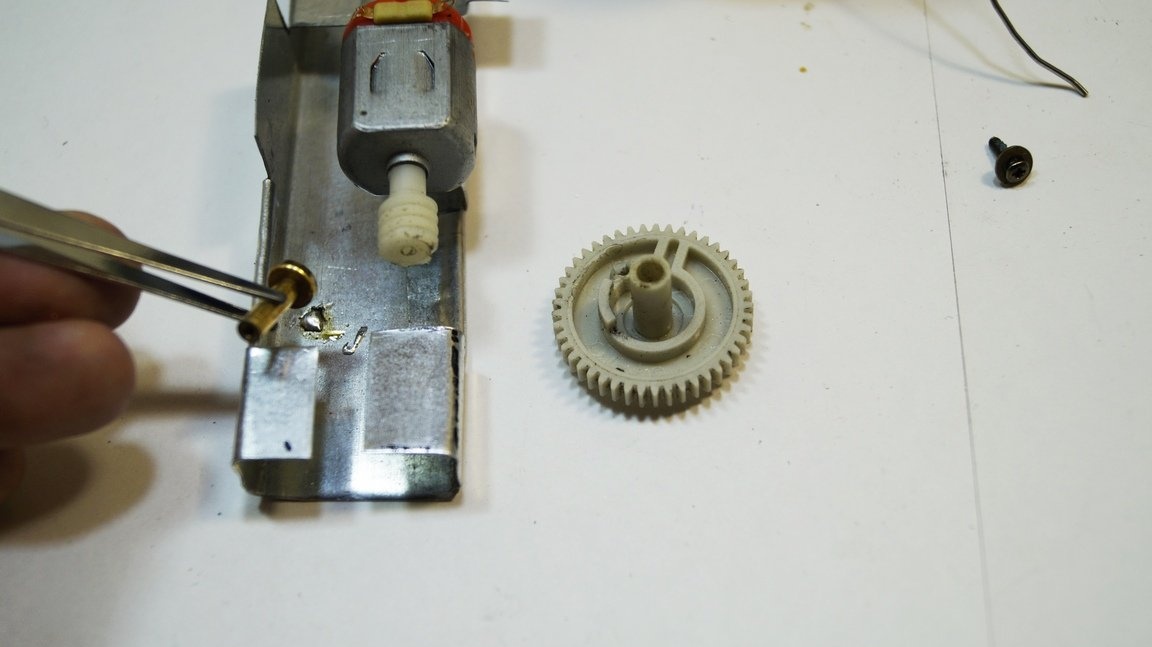
El siguiente paso es soldar el motor eléctrico al marco. El motor antes de soldar deberá desmontarse. Inundamos la carcasa del motor y el marco con un soldador Foto 8.
Soldamos el cuerpo del motor eléctrico y el marco juntos, calentando bien las piezas con un soldador, presionándolas entre sí Foto 9. !!! TEN CUIDADO, DETALLES CALOR MUCHO CALENTADO !!!
Foto 9.
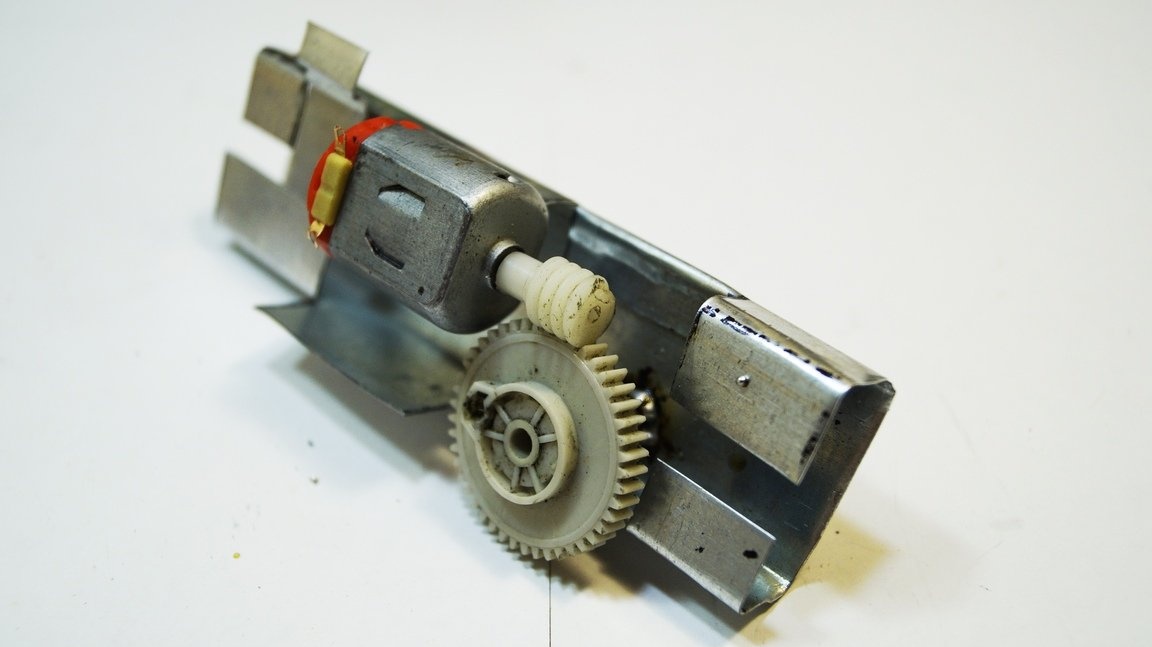
Poner el motor eléctrico de vuelta. Soldamos el eje del cigüeñal en su lugar, esto se hace experimentalmente. El engranaje helicoidal debe estar bien ajustado, los engranajes no deben estar sesgados. Foto 10.11.
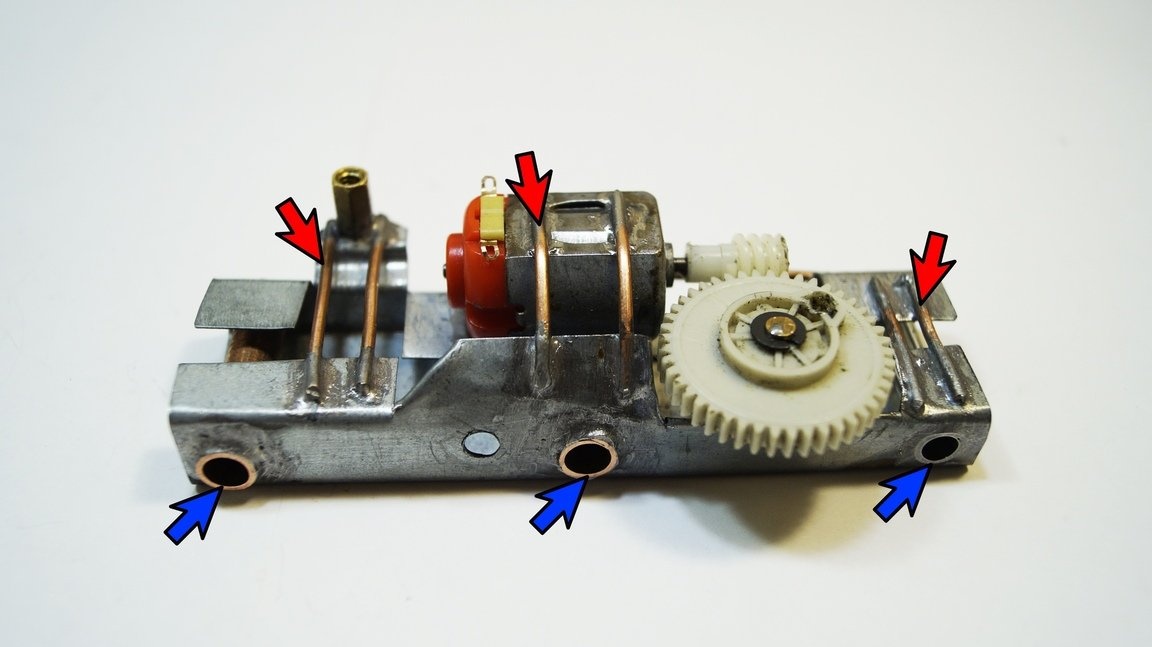
3. Agujeros para las patas de una cucaracha.
Para unir las patas de la cucaracha al marco, debe perforar agujeros con un taladro de 8 mm. Perforamos un agujero en la oreja detrás del motor eléctrico con un taladro de 3.2 mm
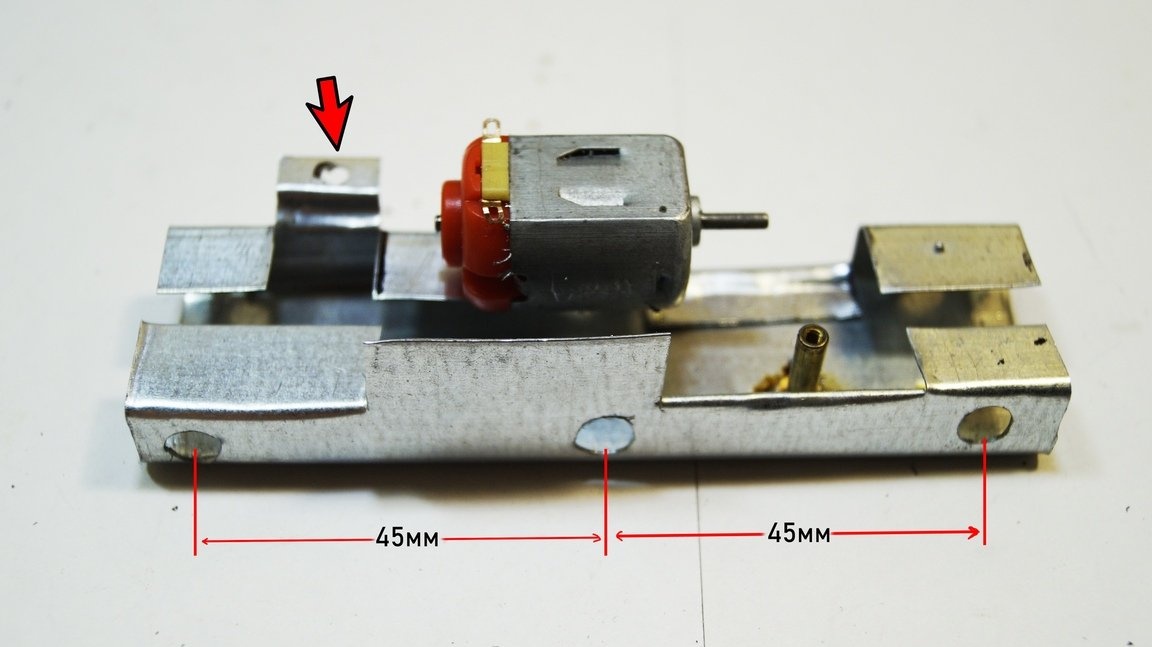
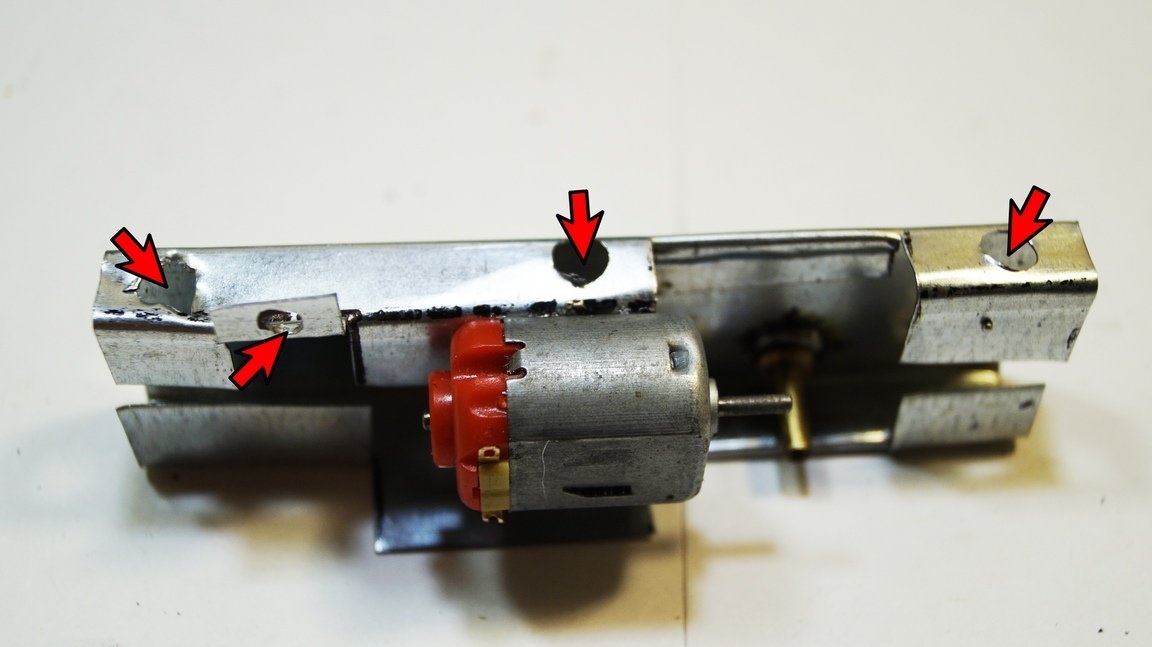
También soldamos una tuerca en el oído detrás del motor eléctrico. La palanca responsable de levantar las patas intermedias a lo largo del eje vertical se unirá a esta tuerca
Para fortalecer el diseño del marco, los refuerzos se soldaron con un alambre de cobre de 2.5 mm.
También se soldaron bujes de 8 mm a los puntos de fijación de las patas de la cucaracha Foto 15.
4. Patas de una cucaracha.
Se usó un alambre de metal con un diámetro de 3 mm como patas de cucaracha, se suelda a la cabeza del perno M6 Foto 16. El par medio de patas de cucaracha se hace de manera diferente, se perfora un agujero en la cabeza del perno a lo largo del diámetro del alambre. El alambre está doblado en forma de letra "S", esto permitirá que las patas de la cucaracha se muevan verticalmente. Foto 17.
Foto 16.
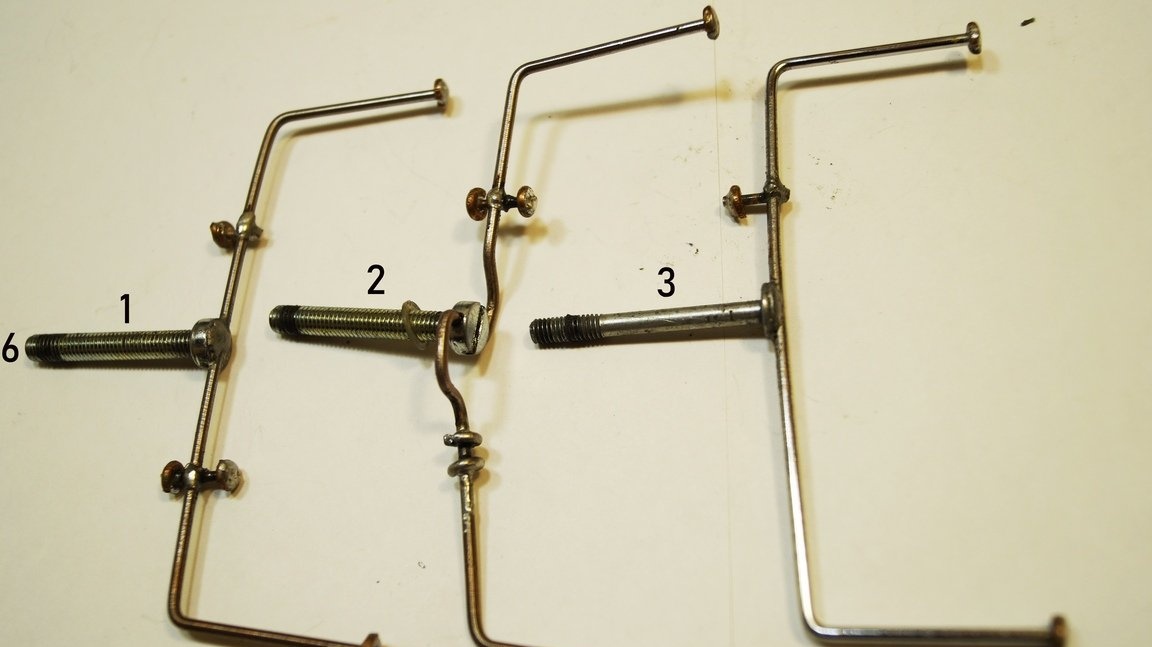
Foto 17.

Para sujetar las varillas, se suelda un alambre de cobre con una sección de 2.5 mm de largo y 12 mm de largo a las patas de la cucaracha, se sueldan anillos de cobre en sus extremos. Las varillas están hechas de alambre de cobre con una sección transversal de 2.5 mm, las dimensiones son aproximadas, es aconsejable doblar el alambre para que en el futuro exista la posibilidad de ajuste a lo largo de la foto 18.
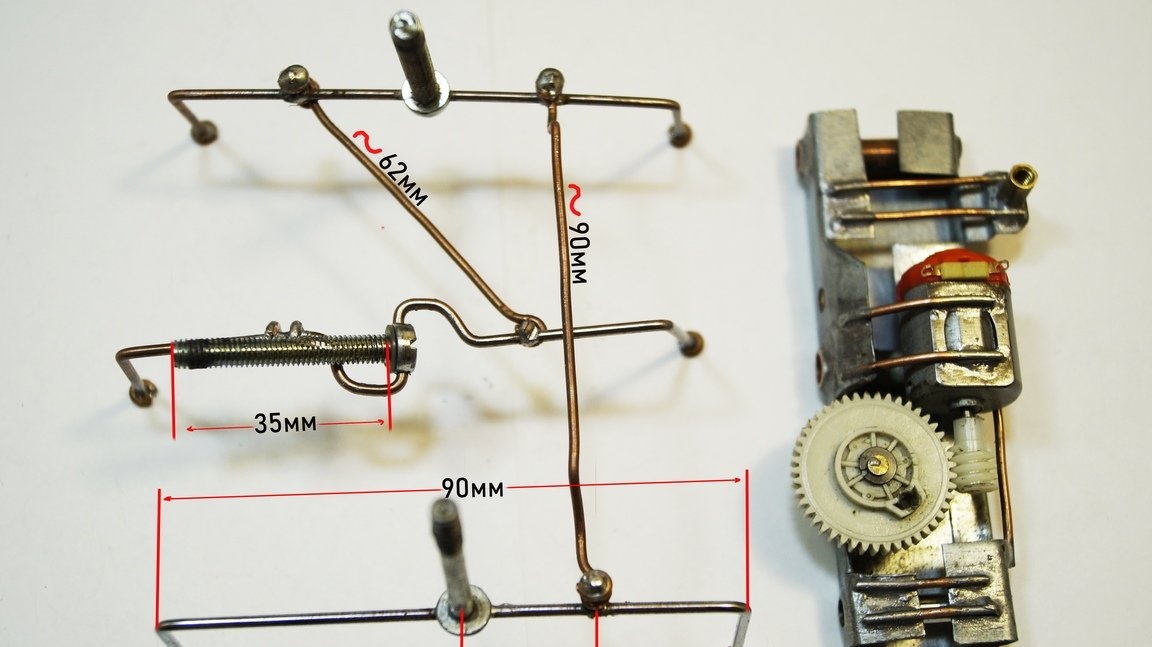
La foto 19 muestra una vista inferior, con patas montadas en el marco.
Establecemos tracción desde el mecanismo de manivela hasta las patas delanteras de la cucaracha. Hacemos un empuje con un dobladillo para la capacidad de ajustarlo. Radio de manivela 8 mm Foto 20.
Hacemos una palanca para mover las patas centrales verticalmente del alambre de cobre Foto 21.22.
Esto completa la parte mecánica de la cucaracha.
Foto 21.

La foto 22 muestra la ubicación de las patas en la posición inferior del eje del mecanismo de manivela.
Foto 22.

5. La parte eléctrica.
Pegue el compartimento de la batería en una cinta de doble cara al marco de la cucaracha. Pegue el botón de encendido en el compartimento de la batería. Soldamos todos los elementos de la foto 23.
El robot - la cucaracha esta lista !!!