

Este artículo analiza la fabricación de equipos de radio control proporcionales basados en placas. Arduino. Una característica interesante del proyecto es que el equipo se concibió como una alternativa al equipo "adulto", pero que usted mismo puede hacer. Hay teclas de ajuste en el transmisor, lo cual es importante para el control, por ejemplo modelos En las aeronaves, el transmisor también está equipado con una pequeña pantalla con LED orgánicos, que muestra información básica sobre el funcionamiento del transmisor. El equipo está diseñado para 6 canales, 4 proporcionales y 2 discretos. El autor también sentó las bases para la futura adición de dos canales proporcionales más, se agregaron 2 potenciómetros al caso, pero en este momento no están involucrados. Sin embargo, esto es suficiente para controlar el modelo de un avión, barco o automóvil, y los canales discretos le permitirán controlar la carga adicional, por ejemplo, la inclusión de faros, luces de cubierta, luces de navegación o incluso lanzar pequeños misiles. El equipo tiene dos modos de control: lineal y exponencial.
Para el transmisor necesitarás:
1 x Arduino NANO / UNO / ProMini
1 x placa de protección BMS para tres latas de iones de litio
1 x conector de 5,5 x 2,1 mm
1 x Step Up DC / DC Converter XL6009
1 x convertidor reductor pequeño LM2596 (hablaré sobre esto por separado)
3 x 18650:
2 x joysticks JH-D202X (vendido en Ali)
2 x interruptor de palanca
1 x pantalla OLED i2c 0.96 pulgadas 128X64
1 x módulo de radio NRF24l01 con amplificador y antena
9 x botón táctil 6 * 6 * 5 mm
Resistencias de salida (ver diagrama)
Para el receptor necesitarás:
1 x Arduino NANO / UNO / Pro Mini
1 x Módulo de radio NRF24l01
1 x regulador de voltaje AMS1117 3.3V
30 x pls peines
1 x tablero
1 x 10 uF condensador
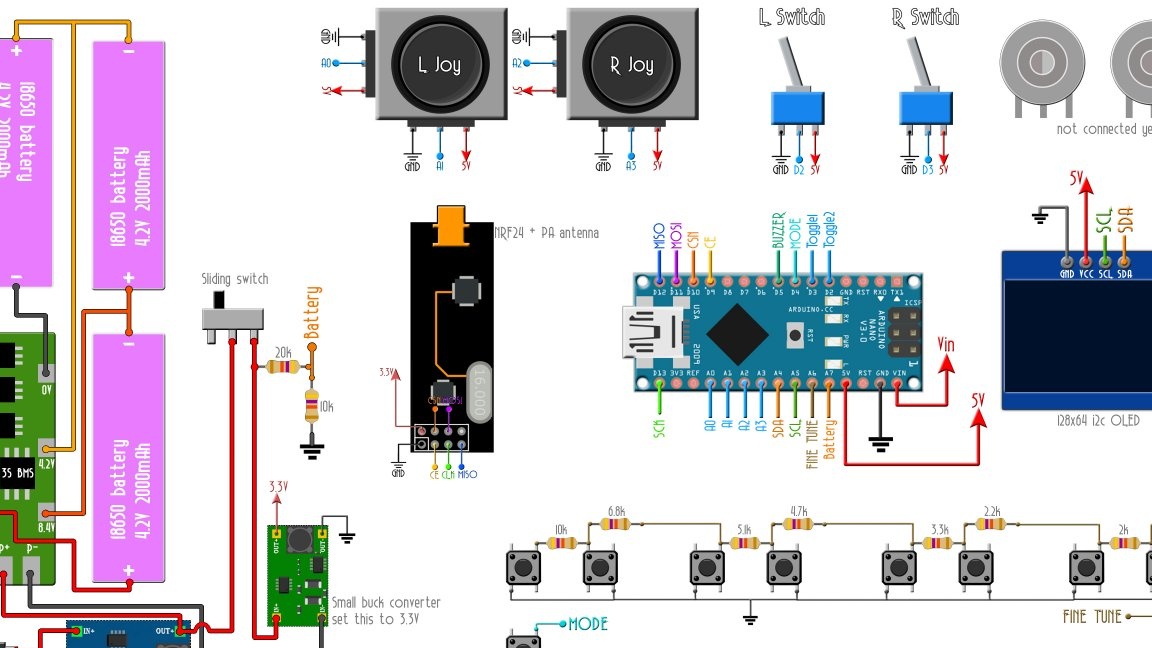
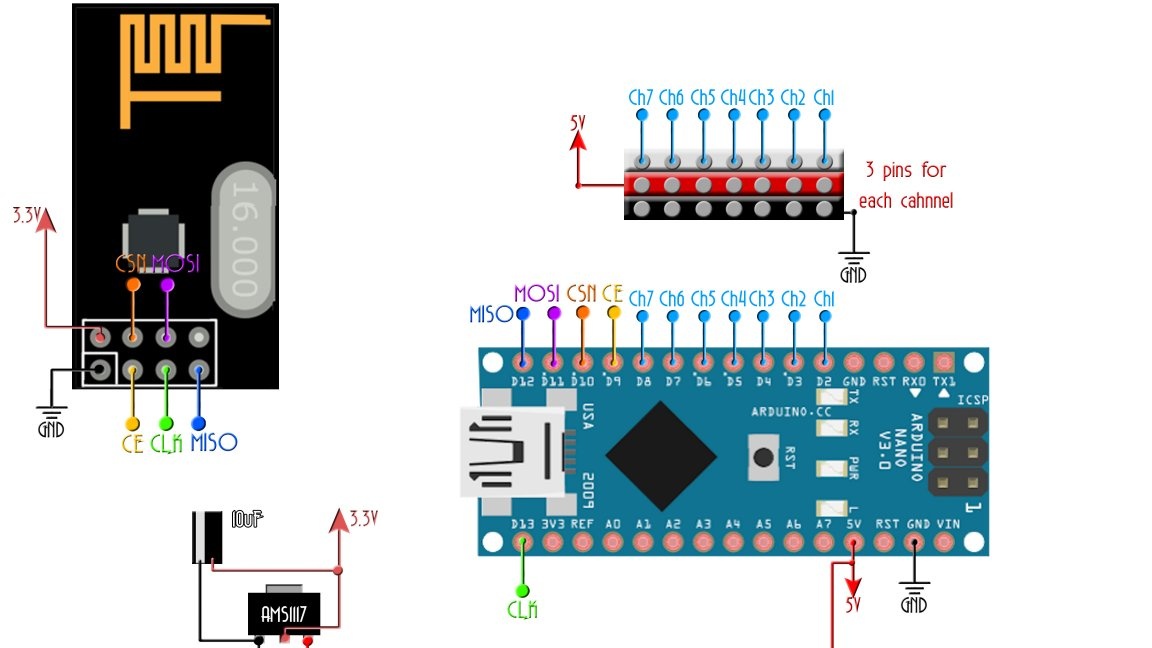
A continuación puede ver una imagen gráfica de todos los componentes y un diagrama de su conexión. Antes del ensamblaje, los convertidores reductores deben configurarse, XL6009 a 12,6 V (este módulo es responsable de la carga), LM2596 a 3,3 V (alimentación al módulo de radio). En lugar de LM2596, es teóricamente posible usar ASM117, de acuerdo con la hoja de datos, el voltaje de entrada máximo de este estabilizador es de 15 V, pero se recomienda no aplicarlo a más de 12 V. Aparentemente, en base a estas consideraciones, el autor usó otro convertidor CC / CC. En cambio, también puede usar un estabilizador ajustable, por ejemplo LM317.
Vivienda
El estuche consta de dos partes principales: la superior y la inferior. Además, se imprimen 9 botones (8 para recortar y un botón de modo), 5 copias de seguridad para botones, un bisel de pantalla y un control deslizante de encendido.El autor imprimió un PLA con una goma de borrar con una cobertura del 20%, una boquilla de 0,4 mm y una altura de capa de 0,3 mm. Por cierto, nadie prohíbe el uso de otro estuche, solo puede tomar una caja adecuada, pegarla usted mismo o tomar un estuche bastante grande de un juguete chino, casi se venden en bolsas en sitios clasificados.
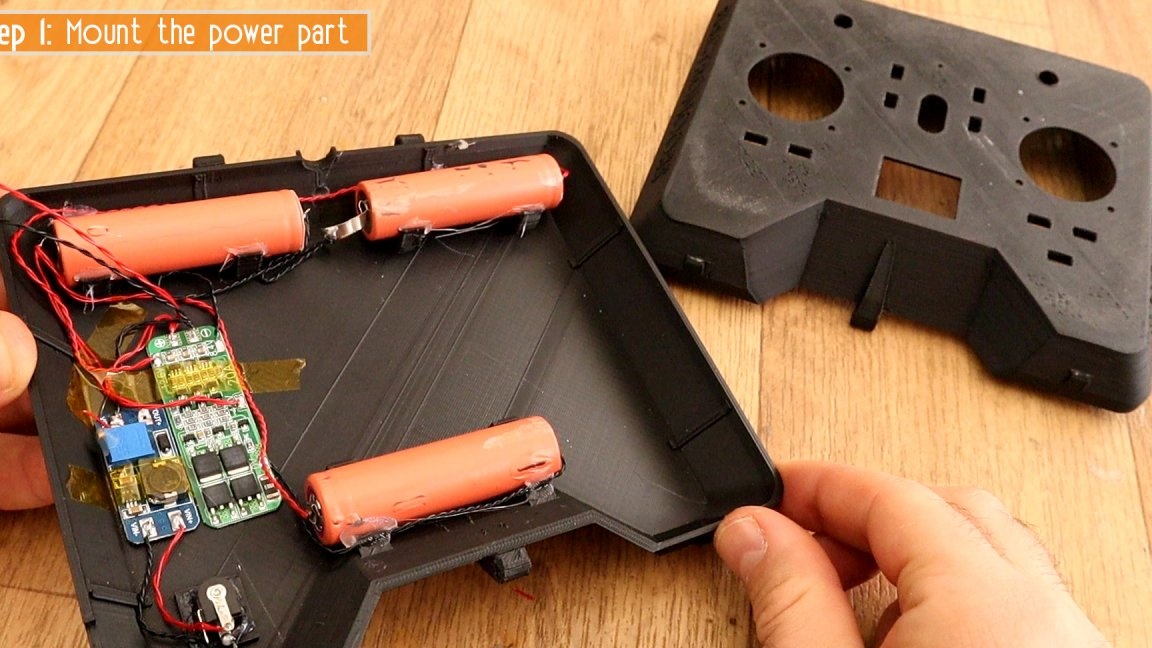
Montaje del transmisor
Las baterías están conectadas en serie. El autor hizo esto soldando, quiero señalar que soldar latas de 18650 requiere algo de habilidad, así que si no tienes esa experiencia, compra baterías con pétalos ya soldados. Además, las baterías de acuerdo con el esquema anterior están soldadas al módulo BMS, cuya entrada se suministra con voltaje del convertidor XL6009 (en su lugar se puede utilizar MT3608). El BMS es responsable de cargar / descargar de manera uniforme todas las latas y apagar la energía cuando las baterías están agotadas. El voltaje también se puede monitorear usando la pantalla. Las baterías se cargan mediante una fuente de alimentación de 9 V con una corriente de no más de 3 A (máximo para XL6009). De hecho, la corriente de carga debe calcularse en función de la capacidad de las baterías y tomar la fuente de alimentación con una corriente ligeramente más baja o limitarla. Es conveniente montar los módulos en la carcasa con la ayuda de la cinta de doble cara "automóvil".
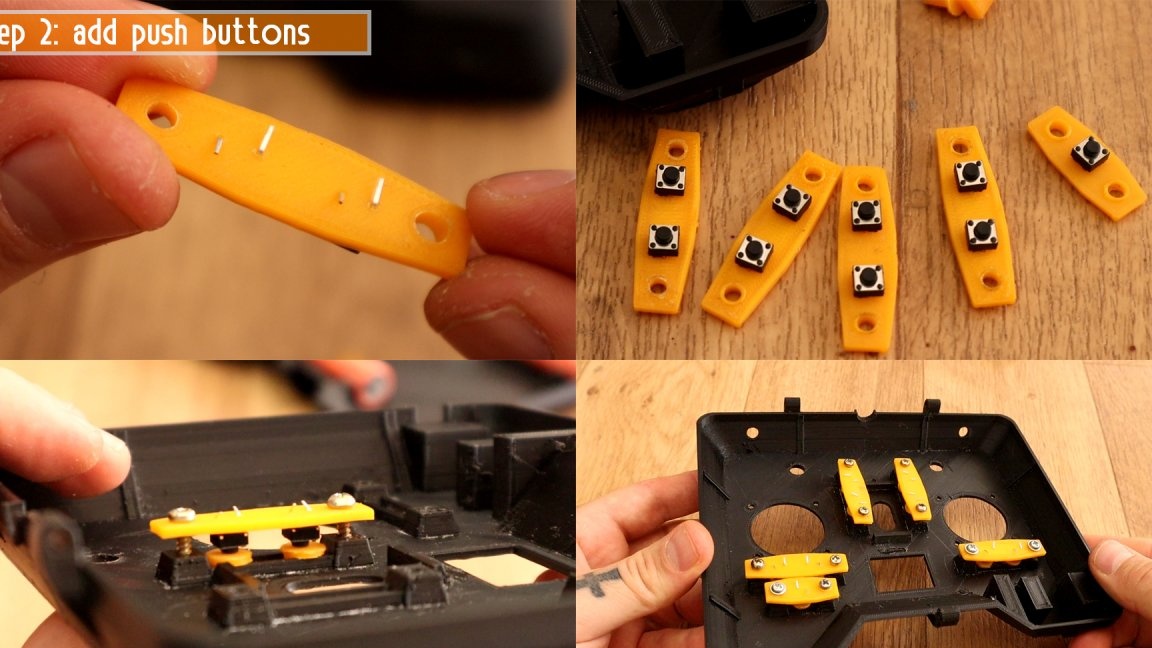
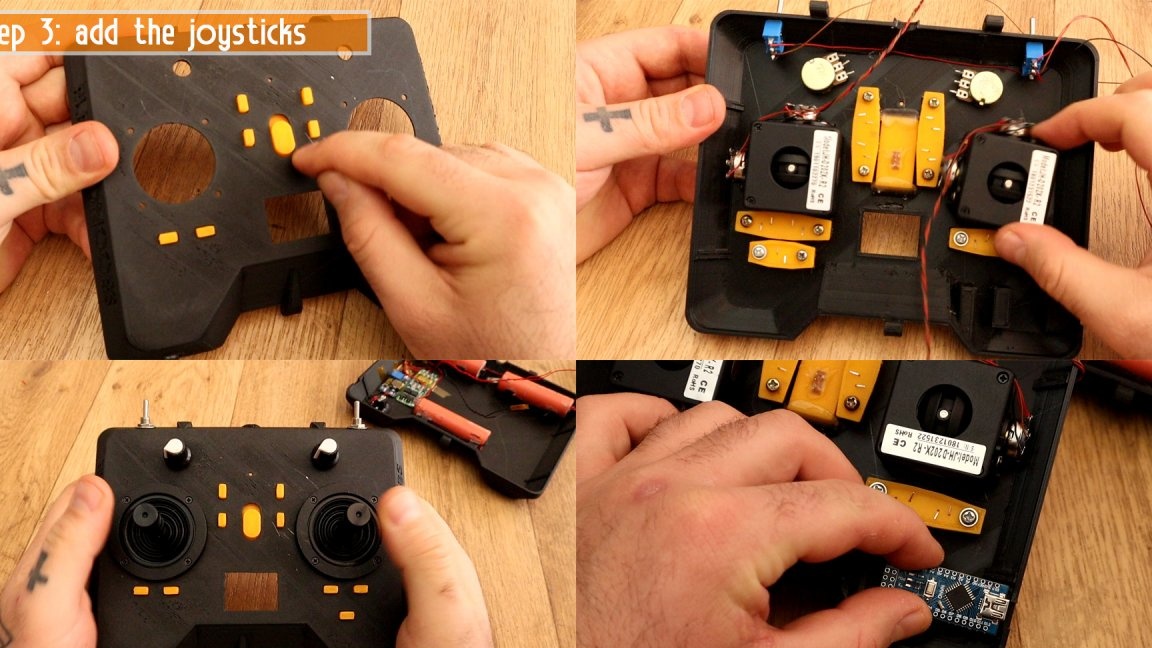
Los botones del reloj se instalan en plataformas especiales, después de lo cual se unen con pequeños tornillos a los soportes correspondientes dentro de la caja. Aquí, de hecho, todo está al nivel del diseñador y se entiende bien en la foto.
Los botones están interconectados por resistencias, dejando esencialmente un pequeño teclado resistivo, que le permite usar solo un pin de la placa Arduino. Los cables se sueldan a los potenciómetros del joystick, los cables extremos van a tierra y 5 V, los cables promedio al pin Arduino correspondiente. Tengo planes de repetir este esquema, ya he experimentado un poco y puedo decir que el código tiene la función de invertir automáticamente los canales según sea necesario, pero aún no he entendido cómo el esquema determina esta necesidad. Esto quiere decir que la inversión del canal se lleva a cabo esencialmente al soldar las conclusiones extremas en algunos lugares. Dichos joysticks, en el momento de la escritura, se venden en Ali a un precio de aproximadamente $ 7 cada uno, ya sea de usted o no. En su lugar, puede usar los módulos de joystick para arduino o joysticks de los controladores de juego.
De hecho, el joystick funciona como un divisor, desviando el mango, cambiamos el voltaje en la salida media del potenciómetro y, dependiendo de este voltaje, el arduino determina la desviación.
[centro] [/ centro]
Los vasos también están conectados. Los interruptores de palanca son necesarios para encendido y apagado, ya que el canal es discreto y tiene solo dos valores: 0 o 1, dependiendo de si la salida del arduino es atraída al suelo o a una fuente de alimentación de 5 V. Además, el interruptor de encendido y apagado es necesario, si deja la salida "suspendida en el aire", qué sucedería al usar tres posicionales, el controlador no entiende lo que está sucediendo y el valor salta aleatoriamente 0 o 1 (en mi experiencia). No se pueden configurar potenciómetros adicionales, por el momento no están involucrados. O puede poner y monitorear la página fuente, quizás el autor eventualmente publicará el firmware actualizado.
De hecho, el joystick funciona como un divisor, desviando el mango, cambiamos el voltaje en la salida media del potenciómetro y, dependiendo de este voltaje, el arduino determina la desviación.
[centro] [/ centro]
Los vasos también están conectados. Los interruptores de palanca son necesarios para encendido y apagado, ya que el canal es discreto y tiene solo dos valores: 0 o 1, dependiendo de si la salida del arduino es atraída al suelo o a una fuente de alimentación de 5 V. Además, el interruptor de encendido y apagado es necesario, si deja la salida "suspendida en el aire", qué sucedería al usar tres posicionales, el controlador no entiende lo que está sucediendo y el valor salta aleatoriamente 0 o 1 (en mi experiencia). No se pueden configurar potenciómetros adicionales, por el momento no están involucrados. O puede poner y monitorear la página fuente, quizás el autor eventualmente publicará el firmware actualizado.
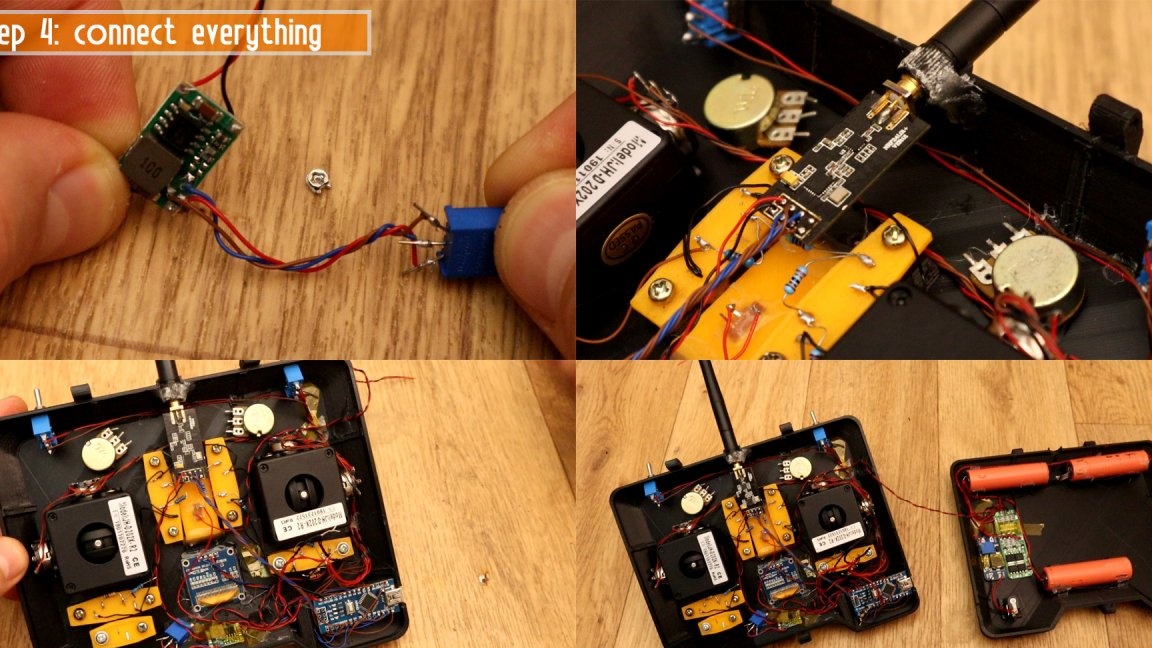
A continuación, se instalan un arduino, un módulo de radio y una placa de alimentación del módulo de radio. Como se describió anteriormente, es necesario establecer un voltaje de 3.3 voltios en él. Es casi imposible hacer esto con la ayuda de una resistencia variable estándar, por lo que el autor la deshizo y soló un recortador de varias vueltas. A continuación, se monta la pantalla y todos los componentes se conectan a los terminales arduino de acuerdo con el diagrama.
Firmware
El firmware de Arduino ya se ha hablado 1000 veces, en este momento, la capacidad de hacer esto mientras se aferra a un proyecto arduino es tan importante por defecto como la capacidad de sostener un soldador en sus manos mientras sostiene algo para soldar.El código para el transmisor, el receptor, las bibliotecas necesarias y un archivo para la impresión 3D del estuche se pueden descargar en un archivo al final del artículo.
Receptor
Para el receptor, necesitará otra placa Arduino, un módulo de radio (sin antena, la telemetría aún no está implementada aquí) y un estabilizador de 3.3 voltios. El receptor está soldado a la placa de pruebas. La potencia del receptor se realiza de la misma manera que la potencia de cualquier otro receptor de fábrica, desde una salida especial del controlador de velocidad.

Por mi cuenta, quiero agregar que en lugar de la antena estándar de este módulo, es deseable soldar la misma antena que está instalada en el módulo con un amplificador (solo sin carcasa). Esto no afectará particularmente el rango de recepción, pero afectará significativamente la calidad de recepción dependiendo de la posición del modelo controlado en diferentes planos. Para los receptores y transmisores modernos, para este propósito, se instalan incluso dos antenas, que están ubicadas perpendiculares entre sí.
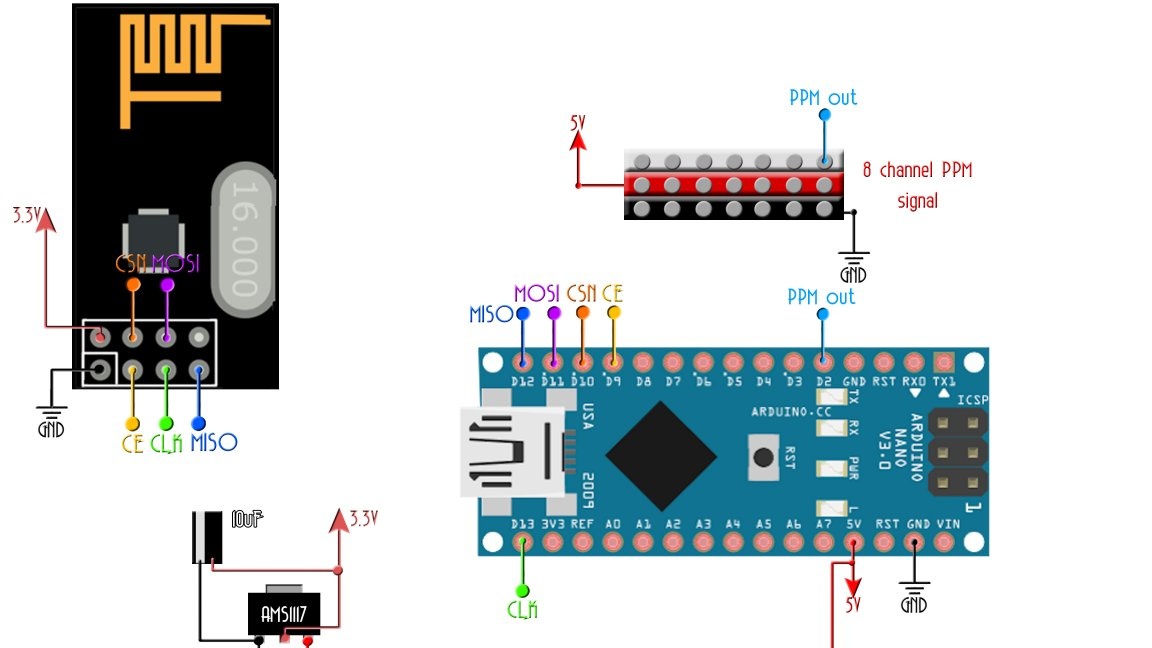
Además, el autor ha implementado una función muy importante: la salida de la señal del receptor PPM. Esquemáticamente, nada cambia, solo necesita completar otro firmware, la señal PPM se emite de la misma manera que en la mayoría de los receptores de fábrica, desde el primer canal (gas).
Eso es todo Personalmente, me gustó mucho el proyecto, y como ya dije, planea repetirlo en el caso desde el control remoto de un juguete para niños. En el menú puede seleccionar el modo de lineal a exponencial y ajustar el valor de cada barra. Tenga en cuenta que el valor promedio de cada canal debe ser 127.
Puedes descargar todo lo que necesites aqui.
Todo el éxito en el trabajo!