El maestro lleva mucho tiempo interesado en los modelos de aviones. Al principio era un modelo de avión, luego un cuadricóptero. En este artículo, el asistente le dirá qué materiales elegir para un quadrocopter, así como también cómo hacer un marco de madera contrachapada. Miremos un breve video de demostración.
Para hacer un quadrocopter, el maestro usó lo siguiente
Herramientas y materiales:
-Contrachapado de abedul;
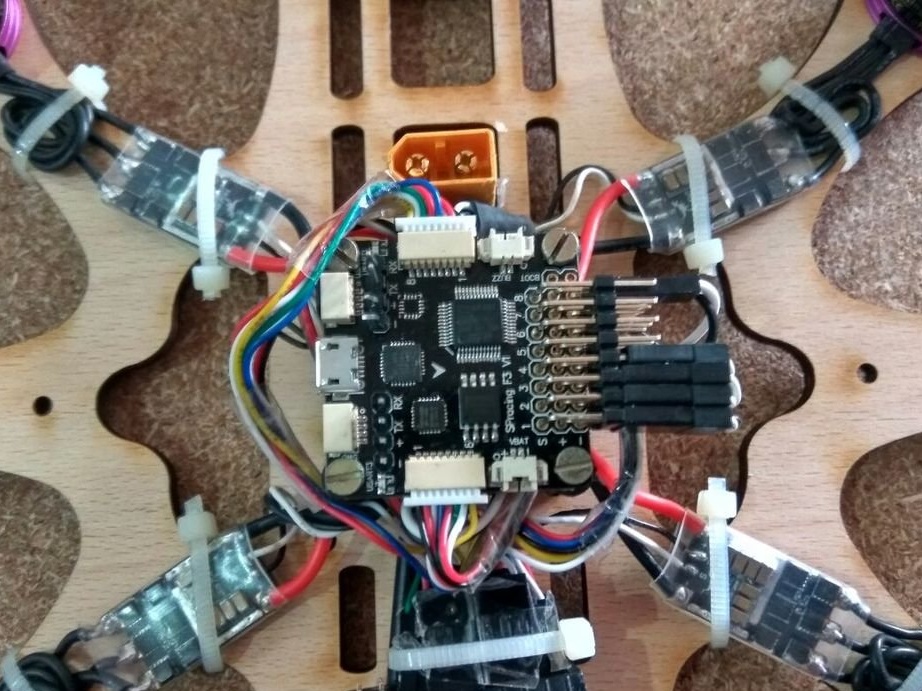
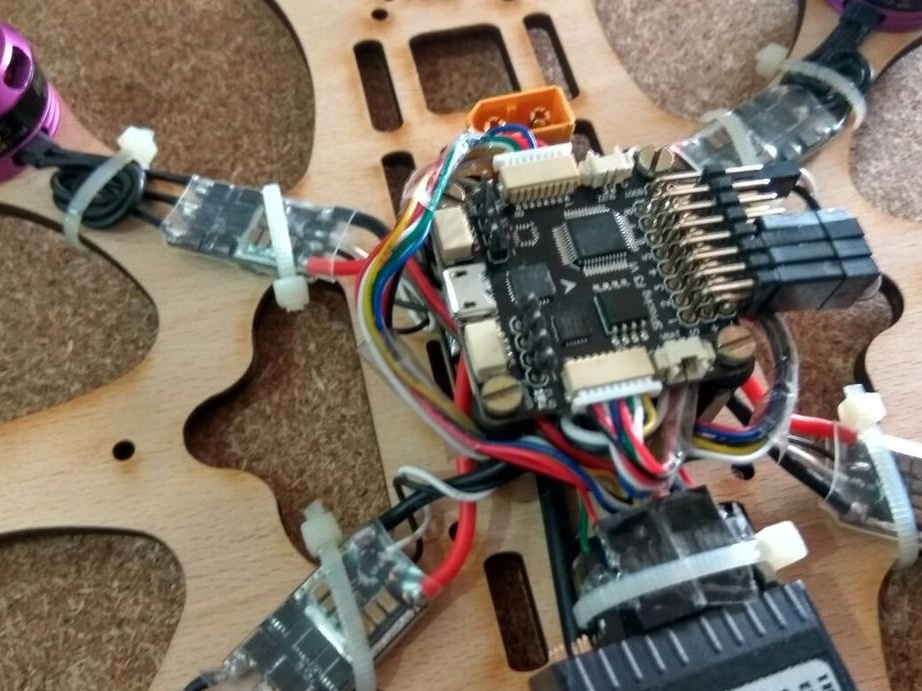
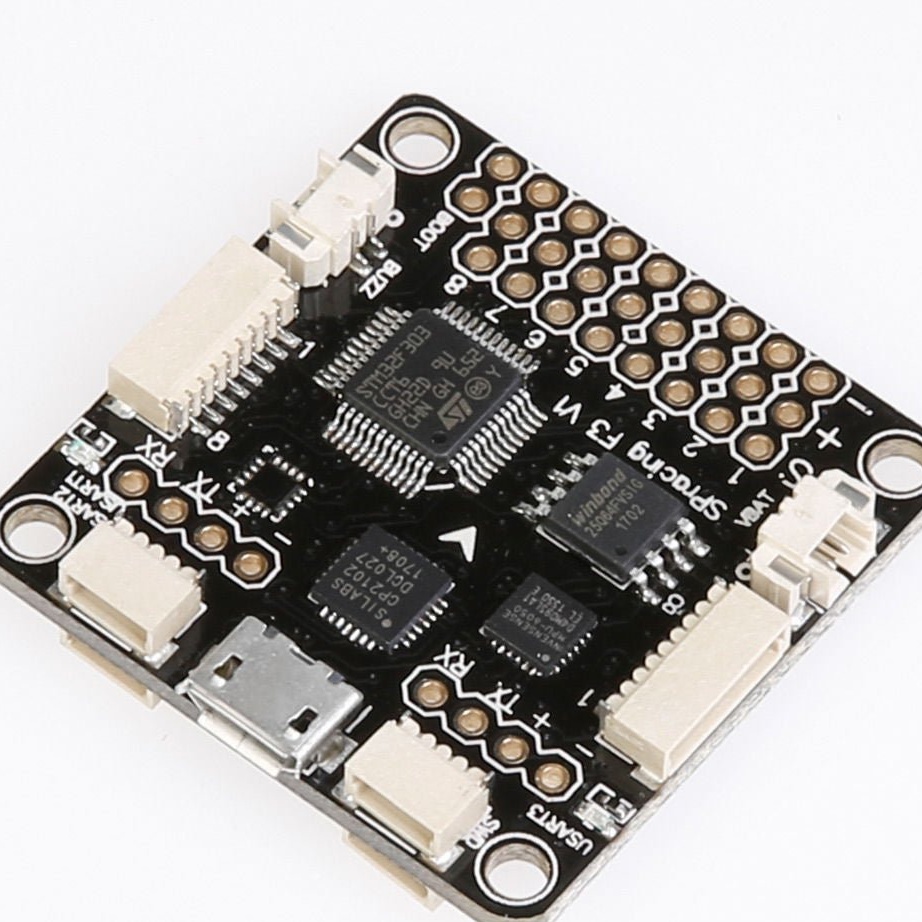
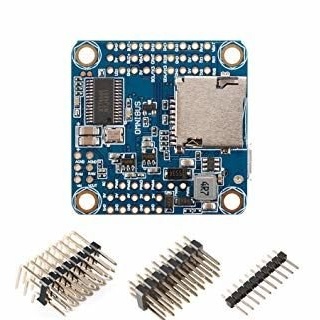
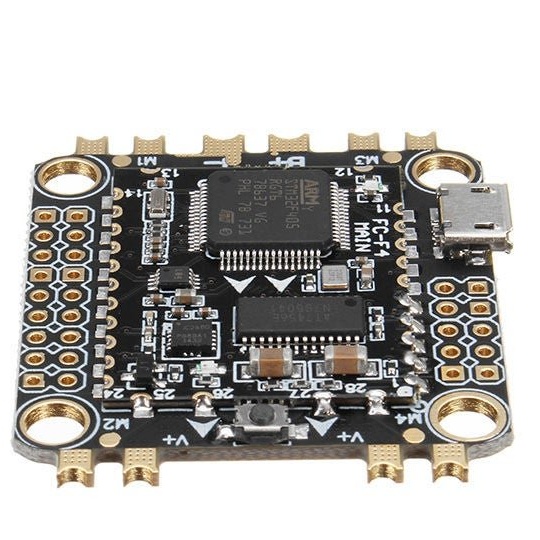
-Omnibus F4 controlador, SP Racing F3;
-Mateck tablero de distribución de energía;
- Controlador HGLRC 28A BLHeli ESC - 4 piezas;
- Motor Racestar BR2204 2600Kv Racing Edition -4 piezas;
- Hélices KingKong 5X4X3 - 4 piezas;
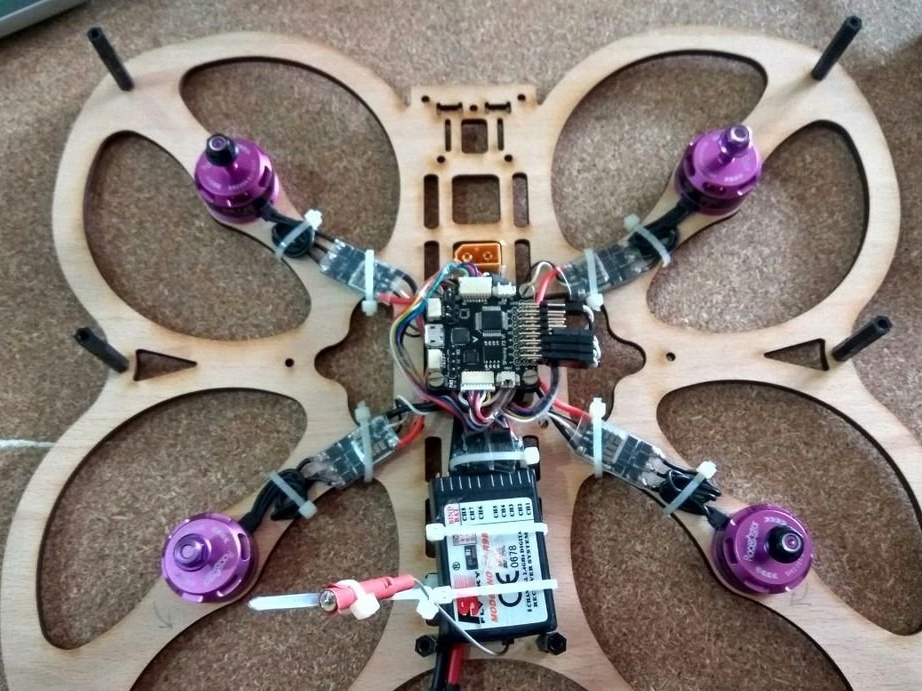
- Módulo de radio Flsky TH9X con receptor;
Batería Gens 3800 mAh;
-Racks; - 16 piezas;
-Tornillos M3;
- destornillador
-Accesorios para soldar;
-Cuchillo
- cortador CNC;
Paso uno: selección de material
Marco.
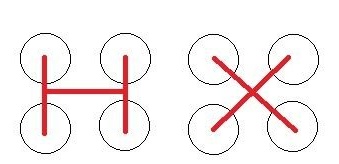
Por lo general, el marco está hecho de componentes ligeros y rígidos, como fibra de vidrio, fibra de carbono, madera, aluminio, etc. Hay muchos tipos diferentes de marcos, el maestro fabricará un marco para cuatro motores.
Tales marcos están principalmente en forma de H o X. La forma de X es un buen equilibrio entre estabilidad y maniobrabilidad. Es este marco el que hará el maestro.

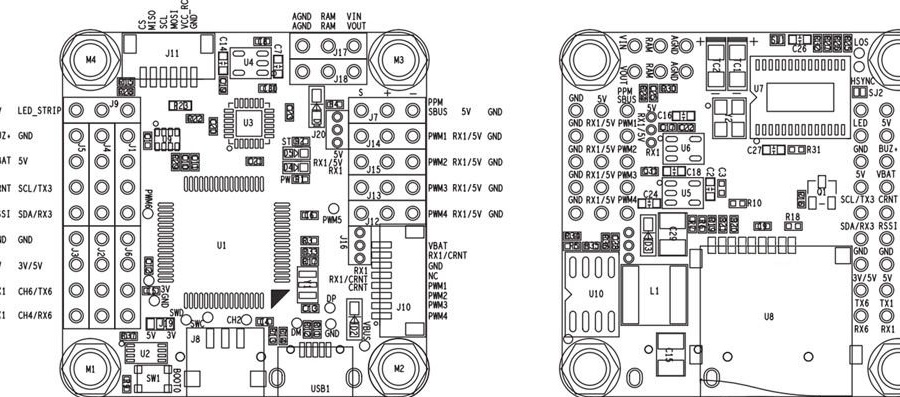
Controlador
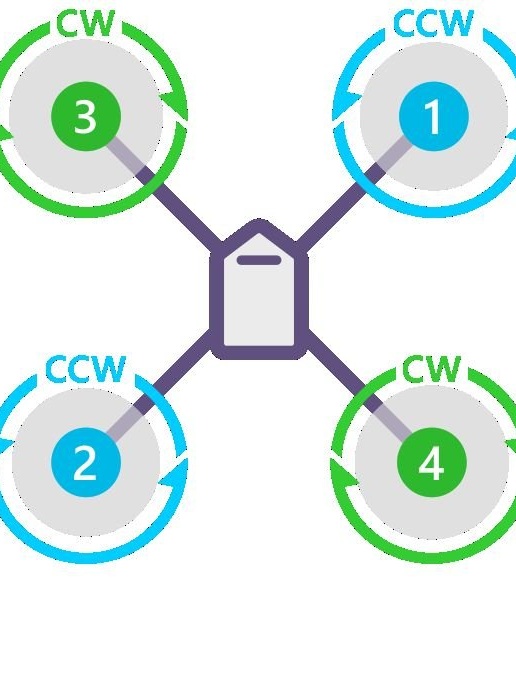
El controlador controla el funcionamiento de los motores. El diagrama muestra que todos los motores giran en direcciones opuestas para neutralizar el par generado por cada motor. El controlador es el cerebro de un quadrocopter, es básicamente una computadora pequeña que usa sus sensores para medir constantemente el ángulo y la velocidad.
Los controladores de vuelo se clasifican principalmente según las especificaciones del procesador.

Motores
Hay dos tipos de motores, motores sin escobillas y motores sin escobillas. La mayoría de los quadrocopters usan motores sin escobillas que pueden responder muy rápidamente a los cambios en los requisitos de velocidad y par. Para motores sin escobillas, especiales electronica controlador de velocidad (ESC).
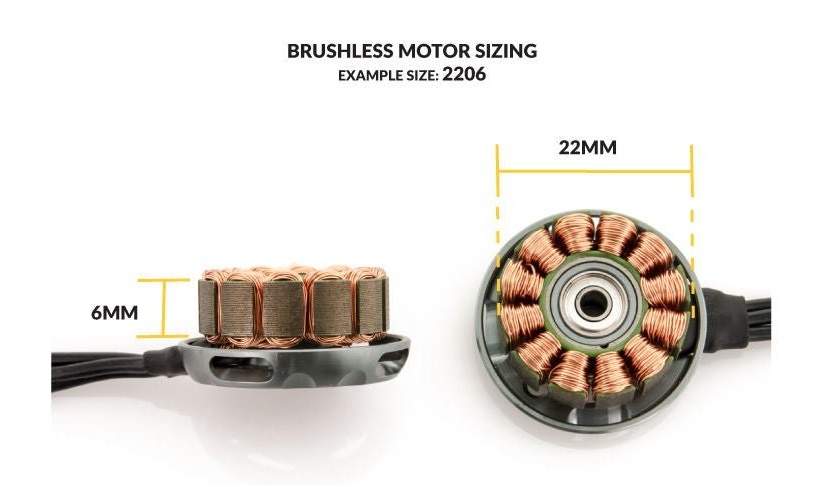
El tamaño de los motores sin escobillas se indica mediante un número de 4 dígitos: AABB. "AA" es el ancho del estator, y "BB" es la altura del estator o el diámetro del estator, ambos en mm (milímetros). Por ejemplo, el Racestar BR2205 tiene un estator con un diámetro de aproximadamente 22 mm y una altura de aproximadamente 05 mm.
De hecho, cuanto más alto es el estator, mayor es la potencia a velocidades más altas, y cuanto más ancho es el estator, mayor es el par a velocidades más bajas.
El valor KV del motor indica la velocidad a la que girará el motor cuando aplique 1 voltio a sus devanados.Está determinado por el número de devanados del cable de cobre en el estator del motor y la fuerza magnética de los imanes.
Menos devanados significan menos resistencia y, por lo tanto, mayores rpm. Esta es la razón por la cual los motores con un KV más alto tienden a tener menos bobinado del estator.
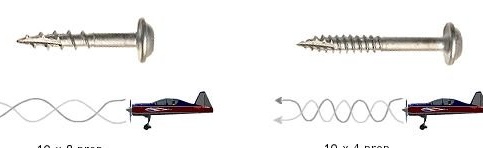
KV determina qué tornillo puede usar con el motor. Cuanto más bajo es el KV, más grande es el tornillo que puede girar, y viceversa. No es posible aumentar la fuerza de elevación instalando un tornillo más grande en un motor con un KV más alto, ya que los requisitos de torque superarán la potencia permitida y el motor se sobrecalentará.
Por ejemplo: los motores BR2205 de 2600 kV pueden funcionar con tornillos de 5x4 pulgadas, y los motores BR2212 de 1000 kV pueden funcionar con tornillos de 10x4.5 pulgadas
El KV no es en absoluto un indicador de la potencia de salida del motor; los motores con un KV más alto no son necesariamente más potentes que los motores con un KV más bajo.


Controladores electrónicos de velocidad (ESC).
Los recientes avances en mini quadrocopters han sido posibles gracias al advenimiento de pequeños controladores electrónicos de velocidad que permiten que funcionen los motores sin escobillas. La operación de los controladores electrónicos de velocidad es recibir la señal del acelerador del controlador de vuelo y mantener la rotación del motor a la velocidad requerida.
Una serie de tecnologías funcionan dentro de estos pequeños dispositivos que están más allá del alcance de este manual. Al comprar, elija un ESC con una corriente continua nominal de al menos 20% más que la calculada.


Hélices
Las hélices convierten la energía mecánica de los motores en tracción. El tamaño y la forma de la hélice juegan un papel muy importante en la eficiencia del vuelo.
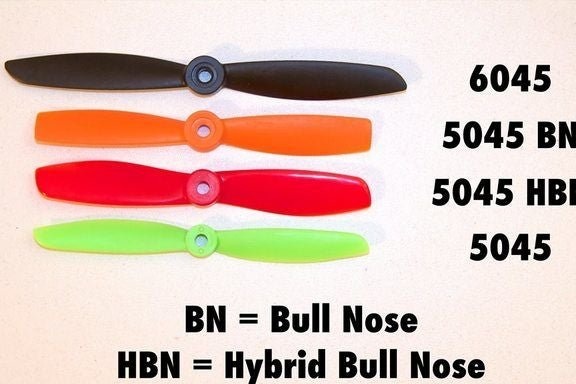
Hay 2 tipos de formatos que utilizan los fabricantes: L x P x B | LLPP x B. Donde, L es la longitud, P es el paso, B es el número de cuchillas.
Las hélices pueden estar hechas de varios materiales, como compuesto de plástico, fibra de carbono, madera, etc. Cada tipo de material tiene características únicas, por ejemplo, la fibra de carbono y la madera son realmente rígidas y conocidas por su funcionamiento suave, y algunos plásticos son extremadamente duraderos. La mayoría de los tornillos utilizados en mini quadrocopters están hechos de compuestos plásticos.
El tamaño de la hélice que puede usar está limitado por el tamaño de su bastidor, así como por la potencia de alta frecuencia de su motor. Como regla general, mientras más hélice puedas usar para crear un cierto empuje, más efectivo será. Para mini quadrocopters, varían entre tornillos de 5-6 pulgadas en incrementos de 4-5 pulgadas.
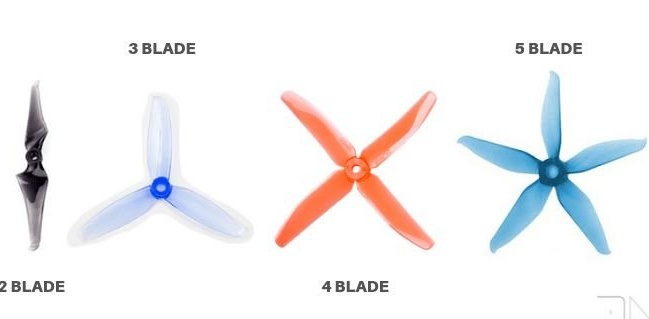
La cantidad de cuchillas afecta la tracción y el consumo de energía. Cuantas más cuchillas, más tracción y más energía se desperdicia.

Las pilas
Actualmente, la mayoría de los drones usan baterías de polímero de litio, comúnmente conocidas como baterías Lipo. La batería junto con el ESC y el motor es un sistema de potencia quadrocopter.
No piense en la batería como un depósito de energía, los motores pueden extraer una cantidad monstruosa de amperios en intervalos muy cortos. Las baterías LiPo son un conjunto de celdas, cada una de las cuales tiene un voltaje nominal de 3.7 V. Si se requiere un voltaje más alto, estas celdas se pueden conectar en serie para formar una batería. Las baterías conectadas en serie están marcadas con la letra "S" y en paralelo con la letra "P".
Cuantas más celdas estén conectadas en serie, mayor será el voltaje y cuantas más celdas estén en paralelo, mayor será la capacitancia.
Por ejemplo:
1S = 1 celda = 3.7 V
2S = 2 celdas = 7.4 V
3S = 3 celdas = 11.1 V
4S = 4 celdas = 14.8 V
5S = 5 celdas = 18.5 V
6S = 6 celdas = 22.2 V
La capacidad se indica en miliamperios o "mAh". Este es el número de amperios que una batería puede entregar en una hora. Por ejemplo, una batería 3S 2000 mAh puede proporcionar 2 A durante 1 hora. así que si su quadcopter tira 20A, entonces su vuelo continuará durante 2/20 * 60min = 6 minutos.
La descarga nominal indica la velocidad máxima a la que puede extraer corriente de la batería. Está indicado por el número "C" en la parte superior. Cuanto mayor sea la clasificación C, mayor será la cantidad de corriente que puede dar la batería.
Por ejemplo, una batería de 2000 mAh 25C puede entregar hasta 2000x25 = 50,000 mA o 50 A.



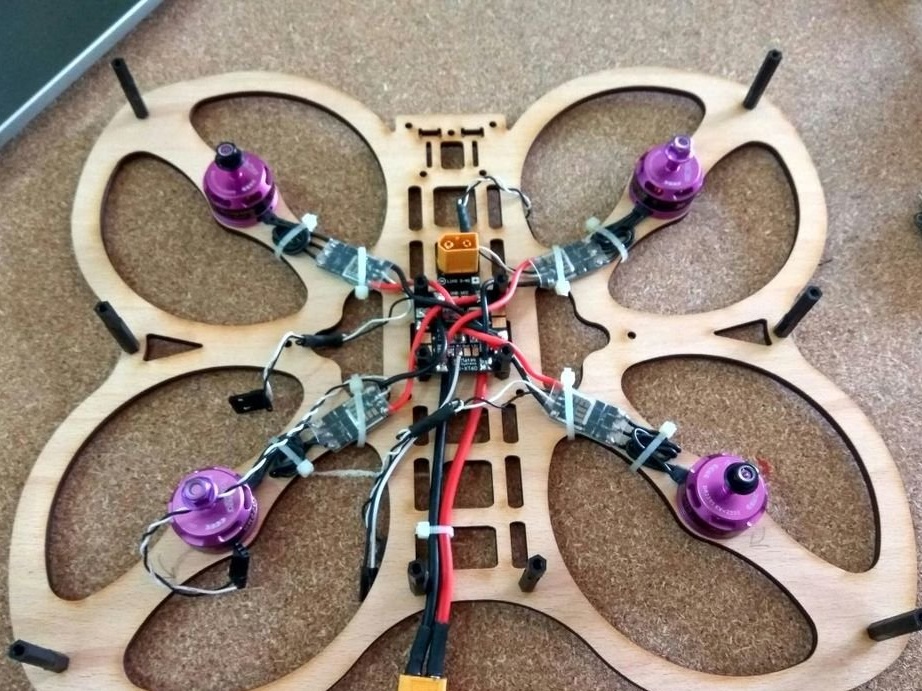
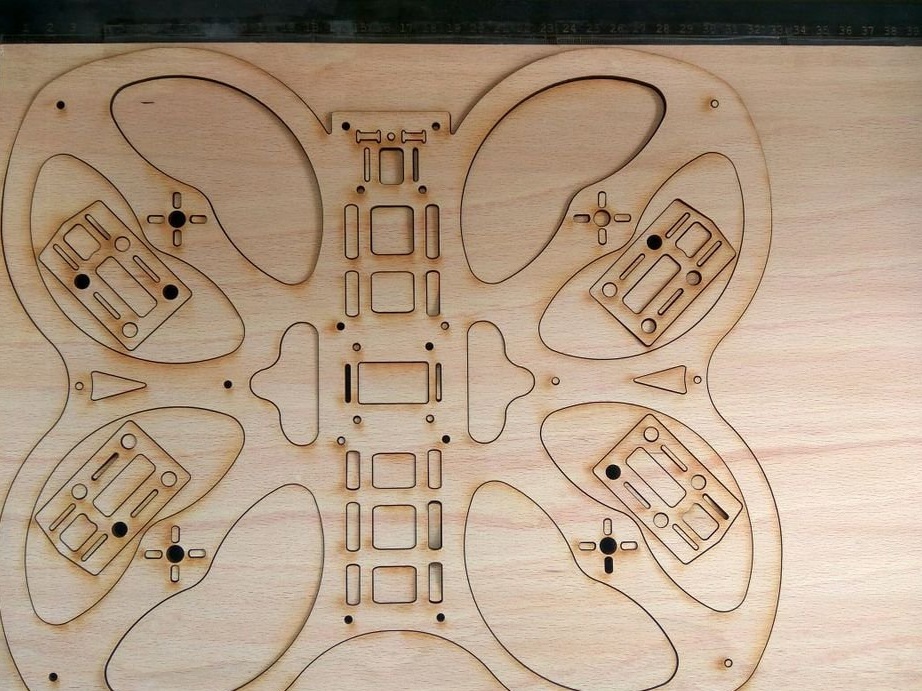
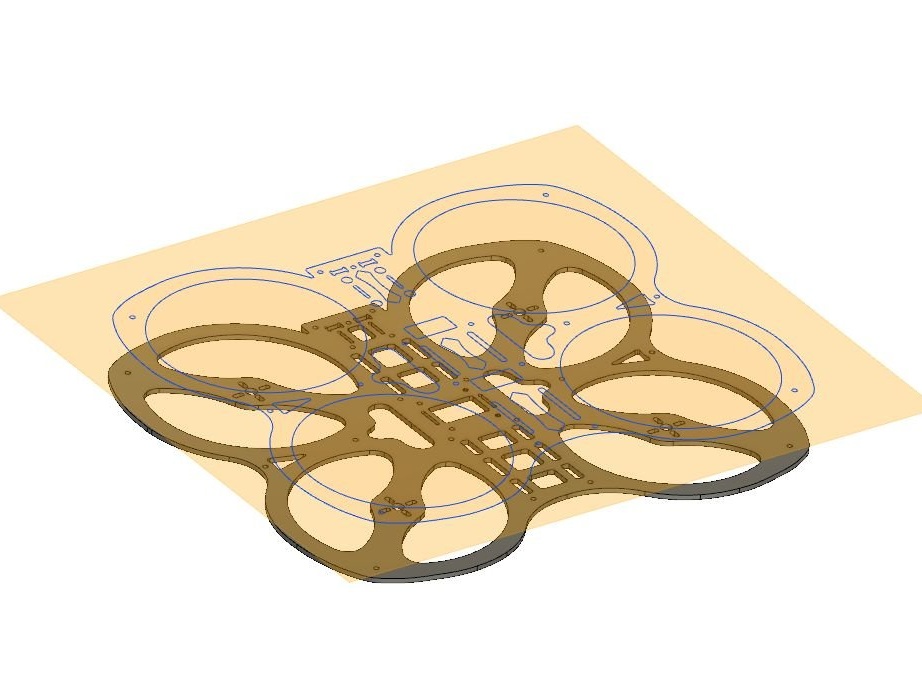
Paso dos: diseño y montaje del marco
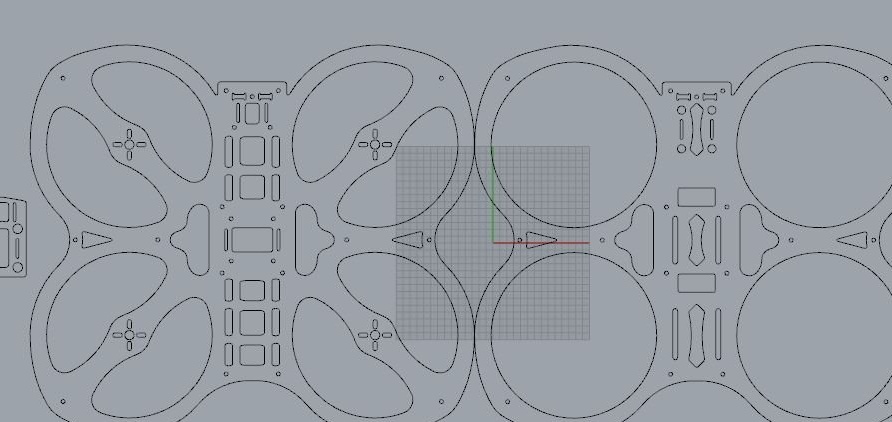
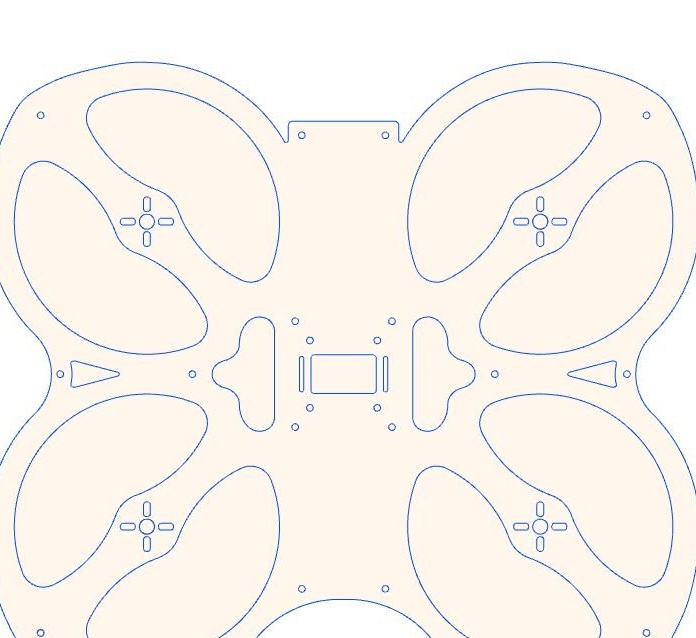
El diseño del marco se inspiró en la forma de la mariposa monarca.Cuando miras el marco desde arriba, se ven como dos alas.
El asistente dibujó el diseño en Fusion 360 y Rhino CAD. El tamaño del cuadro es de unos 230 mm, se debe a la distancia diagonal de un cubo del motor a otro. Los tamaños de cuadro más populares son 210 mm, 250 mm, etc. Una vez que haya establecido el tamaño del cuadro, dibuje los soportes del motor.
El edificio central es el lugar donde se instalarán todos los componentes electrónicos, incluidos el controlador de vuelo, el receptor, la batería, etc. En el punto medio hay 4 agujeros M3 a una distancia de 30,5 mm entre sí.
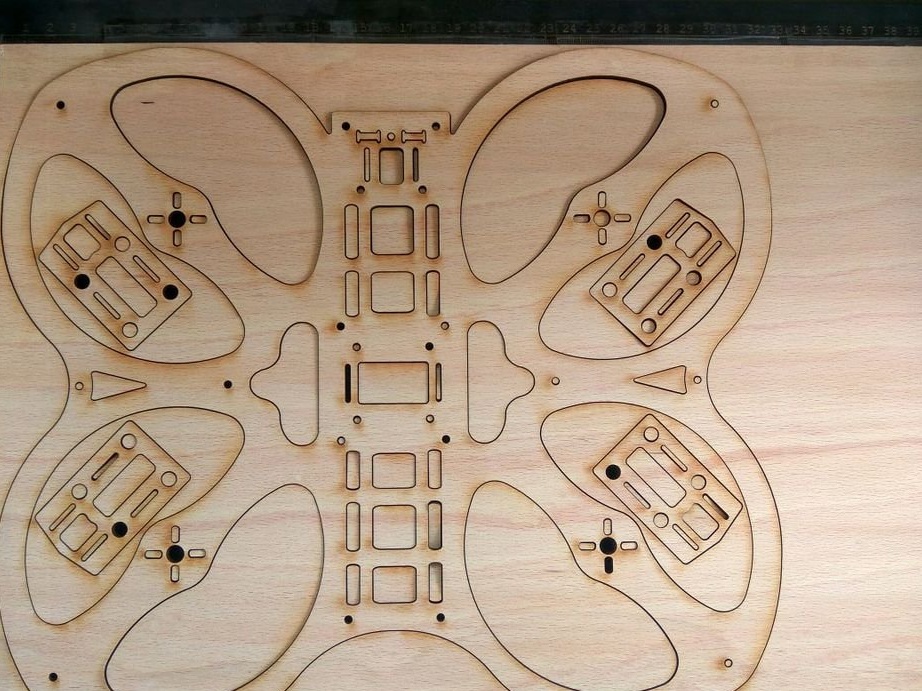
El artículo está hecho con corte por láser. Si no tiene un cortador, puede cortar en el taller. El archivo para cortar se puede descargar a continuación.
Archivo Design.rar









Paso tres: construir
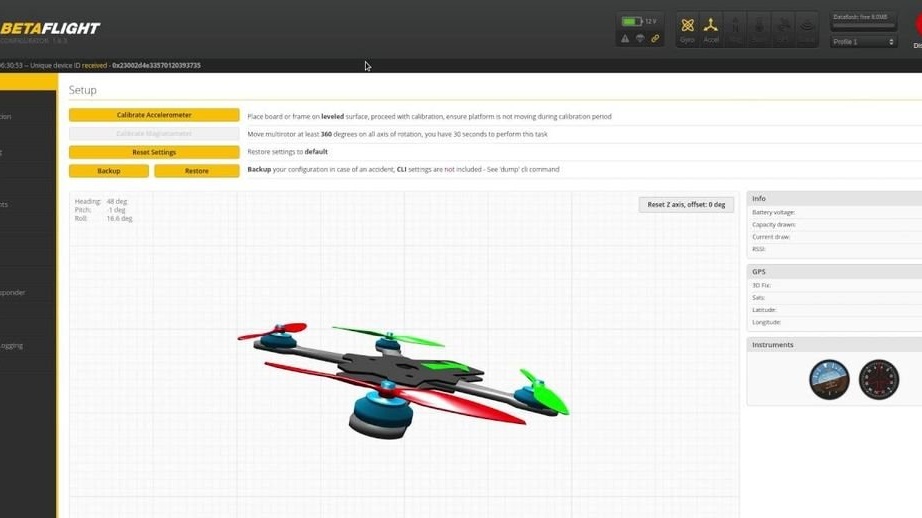
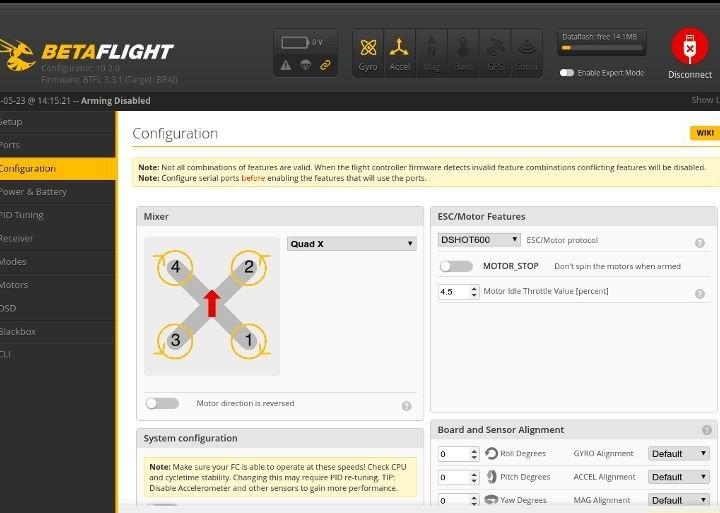
Ahora necesitas ensamblar un quadrocopter.
Primero debe actualizar el controlador con el firmware Betaflight. Luego calibre el sensor. Conecte el módulo de radio y verifique su funcionamiento. Monte los motores en el cuadro de acuerdo con el diagrama del cuadro X con el sentido de giro correcto. Suelde los cables del motor a los terminales ESC y fije el ESC al soporte. Conecte la placa de distribución de energía y suelde las almohadillas ESC. Conecte el Soler XT60 al cable de alimentación y luego a la placa de distribución de alimentación. Repara el controlador. Conecte los cables del ESC al controlador de vuelo. Monte el receptor en el marco. Poner la tapa superior.