



Un cortador de espuma es una gran herramienta para fabricar piezas para aviones. Esta máquina le permite cortar con precisión cualquier forma del perfil aerodinámico según CAD.
La máquina tiene un alambre de nicromo estirado entre dos guías. La corriente pasa a través del cable, el cable se calienta y las guías se mueven, cortando contornos complejos, como alas cónicas. Cada eje es impulsado por un motor paso a paso a través del husillo, la correa GT2 y la polea. La fuerza de corte debe ser mínima y la estructura debe ser lo suficientemente rígida como para soportar la tensión del cable estirado entre los soportes.
Esta es una máquina real de 4 ejes que puede cortar diferentes formas en ambos lados al mismo tiempo, por lo que surge el problema de cómo controlar cuatro ejes independientes al mismo tiempo. Muchos tutoriales se centran en máquinas de 3 ejes, como las impresoras 3D, pero parece que no hay suficiente documentación sobre cómo crear una máquina de 4 ejes utilizando piezas disponibles y software de código abierto. El maestro encontró a varias personas que hicieron proyectos similares usando Arduino y Grbl, y decidió hacer su propia máquina.
Herramientas y materiales:
- Contrachapado (12 mm);
-Barras de metal;
- Tornillo de avance (M8 x 600 mm);
-Motor de acoplamiento M8-M5 (M8 para el tornillo de avance y M5 para el eje del motor);
-Arduino Mega 2560;
-RAMPS 1.4;
-Motores de paso (uno para cada eje);
-A4988 controlador paso a paso (uno para cada motor paso a paso);
- Fuente de alimentación de 12V para Arduino + Rampas;
-Fuente de alimentación variable (cargadores Lipo con modo Hot-wire);
-Cable de nicromo;
Paso uno: software
La parte difícil de crear un CNC de 4 ejes es encontrar un software para generar el código G y controlar la máquina. Una búsqueda de software llevó al creador de https://www.marginallyclever.com/2013/09/how-to-build-a-4-axis-cnc-gcode-interpreter-for-arduino/, desarrollado por Marginally smart, que utiliza Pantalla Arduino Mega 2560 y Rampas CNC 1.4.
Parte de la información ha sido utilizada por los siguientes autores: Rckeith y rcgroups.com
Grbl Hotwire Controller.zip
GRBL8c2mega2560RAMPS.zip
FoamXL 7.0.zip
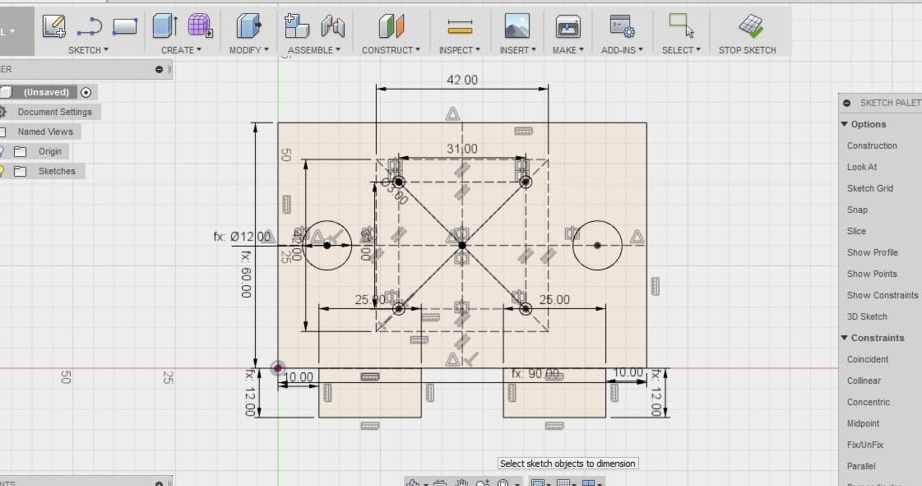
Paso dos: ensamblaje de la máquina
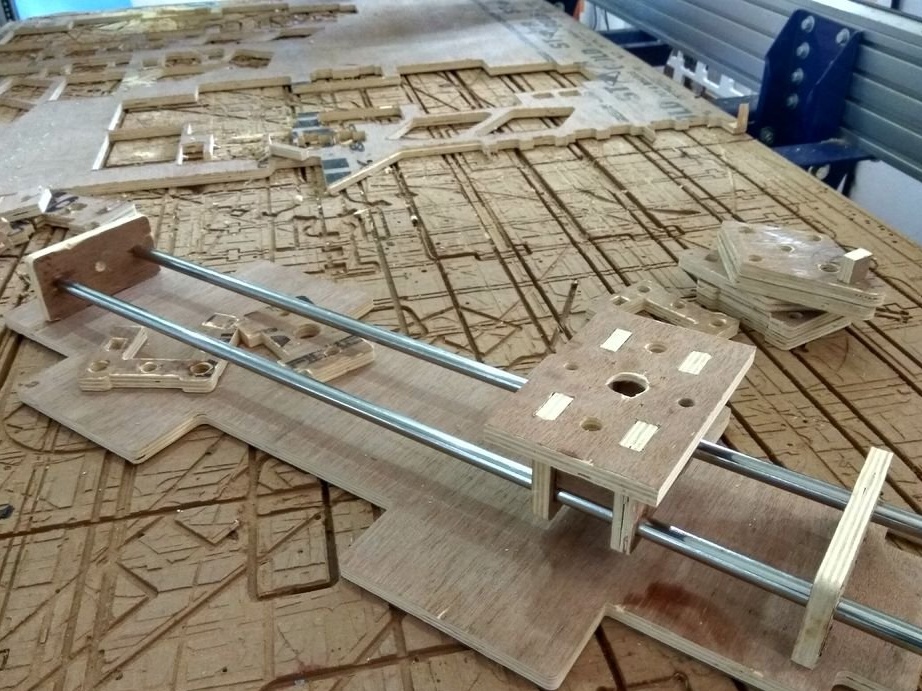
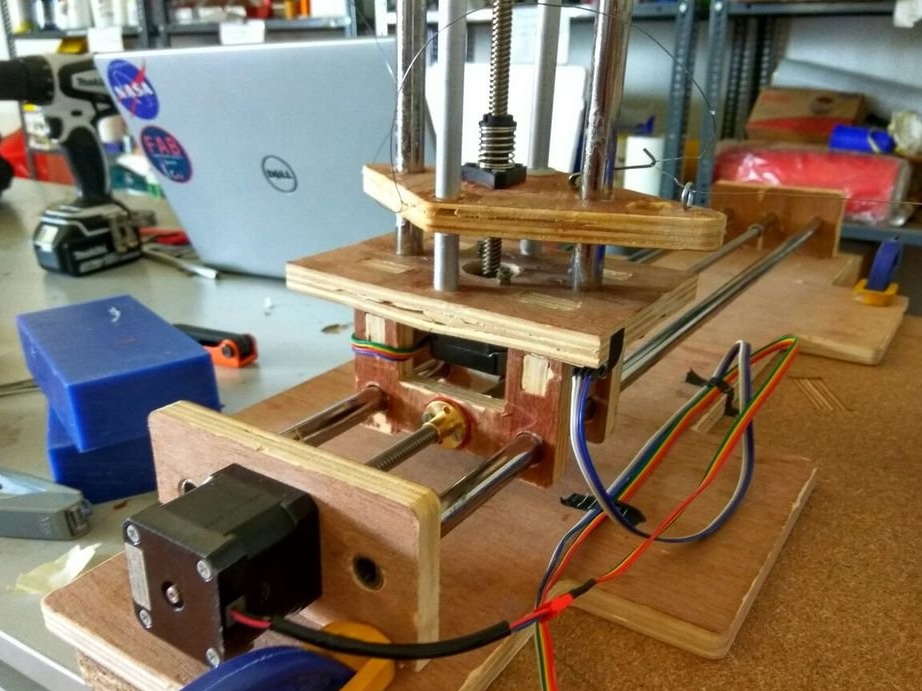
El diseño está hecho de madera contrachapada de 12 mm, el ensamblaje lineal está hecho de tubos de acero con un diámetro de 1/2 pulgada con bloques deslizantes de madera contrachapada. El diseño de los bloques deslizantes se puede mejorar mediante la instalación de un cojinete lineal o manguito.Como el maestro usa un tornillo de avance, tiene suficiente torque para superar la fricción sin un rodamiento. Dos tubos de acero sostienen y sostienen el bloque guía en el mismo eje.
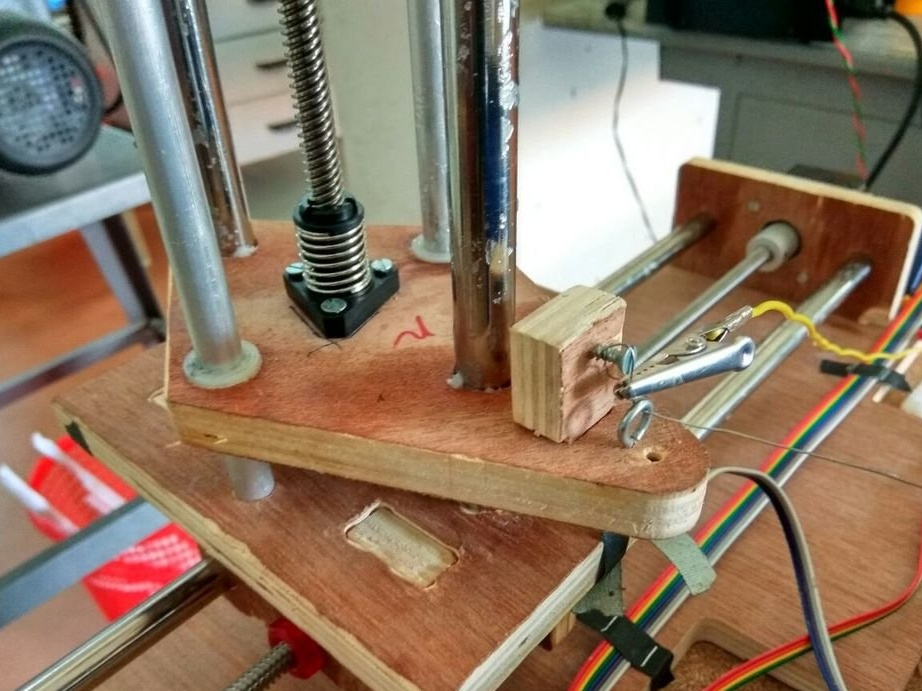
Los pilares verticales se colocan en la parte superior del bloque de guía horizontal. Tiene cuatro caños.
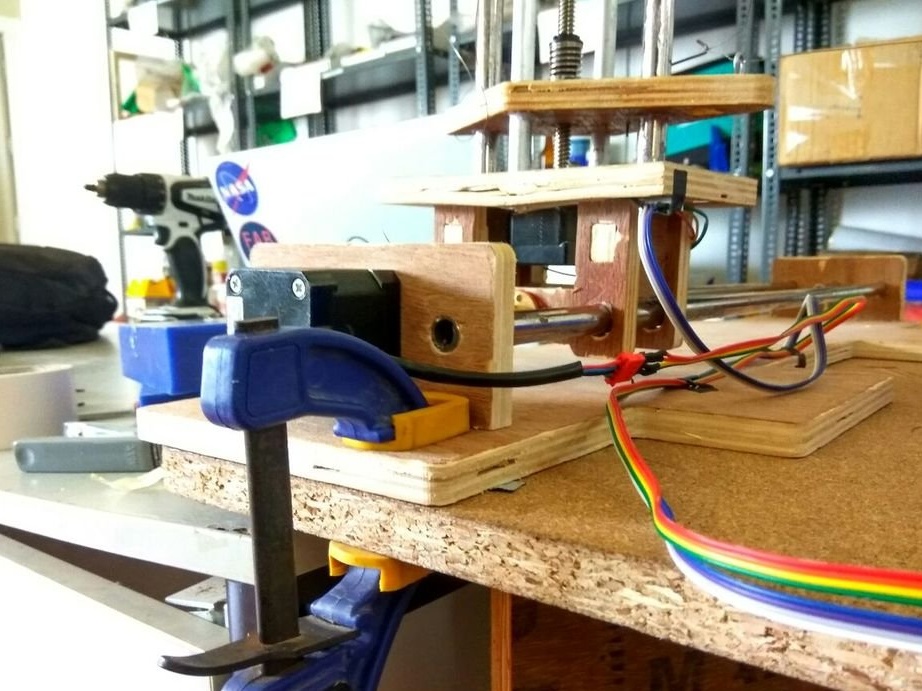
El tornillo de accionamiento está unido al motor paso a paso mediante un acoplamiento flexible. Esto ayuda con cualquier leve desalineación del eje y el tornillo. El montante tiene un motor paso a paso con un tornillo de avance incorporado, que se puede comprar o reemplazar por un motor paso a paso y un embrague convencionales.
Los dos soportes de la máquina son idénticos. En la base hay un lugar para conectar la máquina al escritorio.


Nota Cuando se usan cojinetes lisos, dependiendo del material, puede ocurrir un fenómeno llamado "pegado y deslizamiento". Esto puede hacer que el movimiento se vuelva desigual y provoque vibraciones. También puede provocar el bloqueo, lo que resulta en cargas excesivas y pasos omitidos al usar un motor paso a paso.
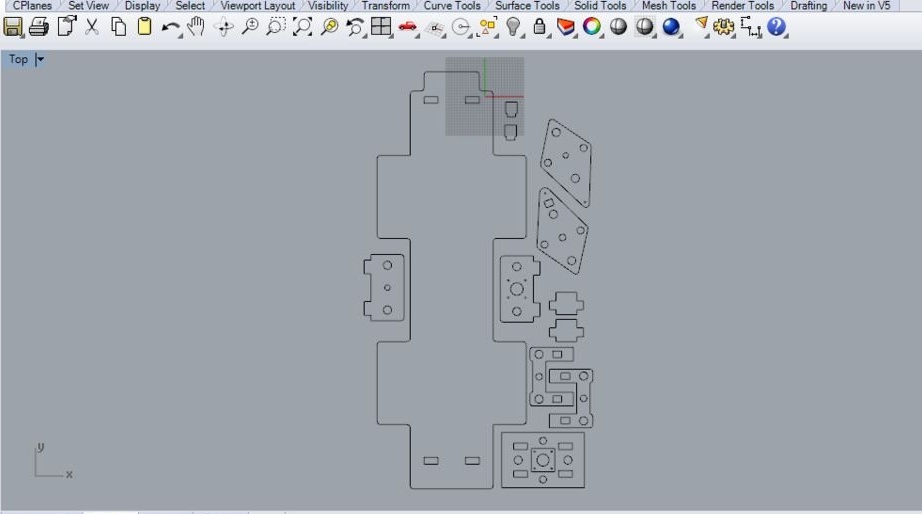
Foamcutter_base.dxf
Paso tres: conectar la electrónica
El siguiente paso es conectar la electrónica, mover los motores y configurar la máquina. Hay 4 motores paso a paso que deben conectarse a la plataforma de Rampas. Los cables deben colocarse completamente para garantizar un movimiento suficiente del eje.
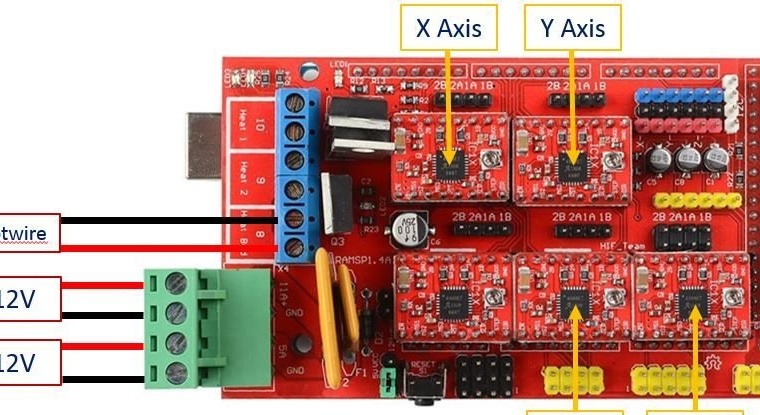
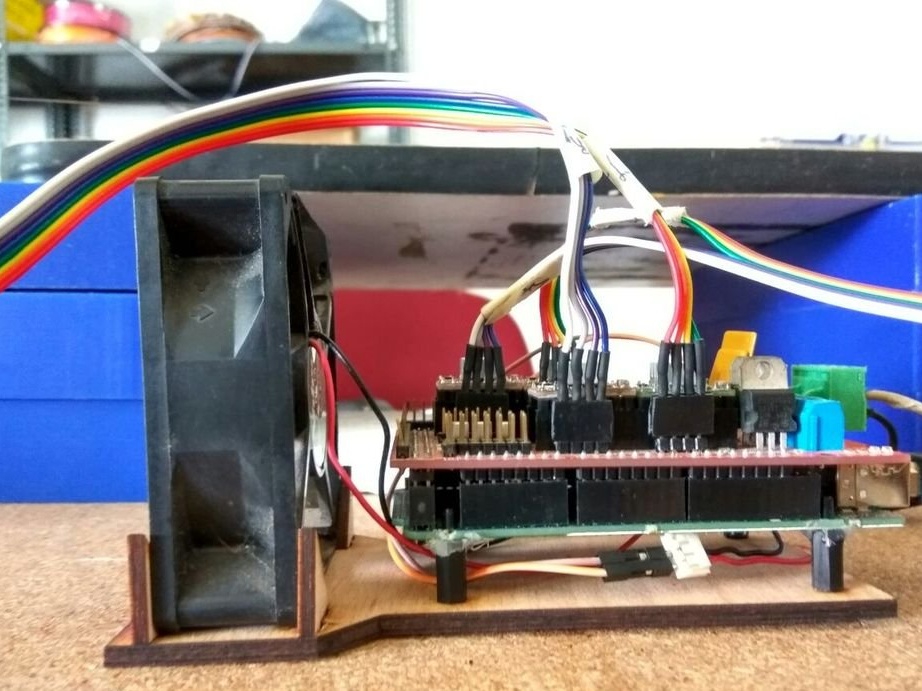
Todo el cableado está conectado a la placa de rampas, que es una pantalla CNC para el Arduino Mega2560. La rampa puede admitir hasta 5 controladores de motor paso a paso, como el A4988. El maestro usa motores Nema 17.
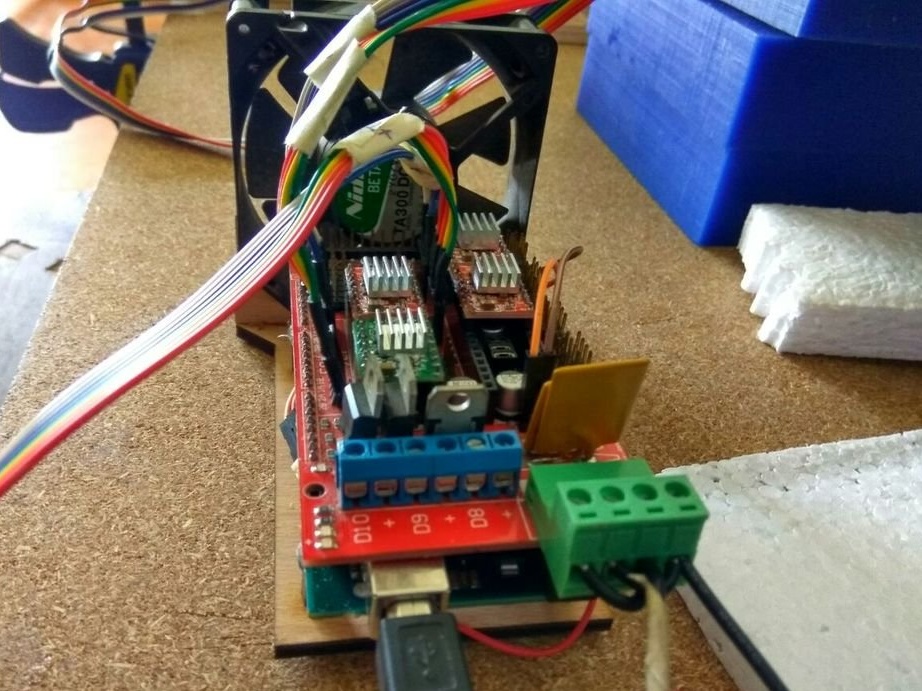
Antes de instalar en una placa de Rampas, asegúrese de que el chip A4988 esté orientado correctamente. Cada motor paso a paso puede arrastrar hasta 2 A, los controladores del motor paso a paso están equipados con radiadores para la disipación de calor. La placa también tiene un MOSFET 11A para controlar la temperatura del cable conectado al pin D8. Todos los componentes de la placa se calientan, asegúrese de garantizar una refrigeración adecuada.
Cuando se enciende el sistema, los motores paso a paso continúan consumiendo corriente para mantener una posición de espera. Componentes como los controladores Stepper y MOSFET pueden calentarse mucho durante el funcionamiento. No use rampas sin enfriamiento activo.
El maestro cortó con láser la base para Arduino y Rampas y conectó un ventilador de 12V para proporcionar enfriamiento activo a la placa.
Paso cuatro: configuración
Cada CNC debe estar configurado correctamente antes de comenzar a trabajar. Dado que los motores paso a paso se utilizan en un sistema de circuito abierto (sin retroalimentación), debe saber qué tan lejos viajará el carro con cada revolución del motor paso a paso. Depende del número de pasos por revolución del motor, el paso del husillo y el nivel de micro transición que se utiliza.
steps_per_mm = (motor_steps_per_rev * driver_microstep) / thread_pitchUtiliza un motor paso a paso con un paso de 200 rpm. accionado por el controlador A4988 a 1/16 microstep, con un tornillo de avance en incrementos de 2 mm.
Steps_per_mm = (200 * 16) / 2 = 1600El tornillo que utilizó el maestro era de doble cara, por lo que el valor será la mitad del indicado anteriormente, es decir, "800". Si el tornillo es de cuatro etapas, entonces el valor será un cuarto del anterior.
Después de flashear Mega 2560 con el archivo Grbl8c2MegaRamps, abra el monitor del puerto serie e ingrese "$$" para acceder al panel de configuración de Grbl. Para cambiar cualquier valor, ingrese $ número = valor. Por ejemplo, $ 0 = 100 Después de configurar la máquina, asegúrese de que la máquina mueva el valor exacto como se muestra en el controlador.
Paso cinco: nicrom
Para cortar la espuma, necesita un cable hecho de un material adecuado que pueda soportar el calentamiento y tenga la misma temperatura a lo largo de toda la longitud.
El nicromo es un material adecuado. Es mejor usar un cable tan delgado como sea posible para reducir las ranuras durante el corte y asegurar líneas de corte limpias. Como regla general, cuanto más largo sea el cable, mayor será la tensión que se debe aplicar y más grueso será el cable.
El siguiente paso es conectar el cable de nicromo a la máquina. Como tenemos 4 ejes independientes, no podemos simplemente ajustar ambos extremos del cable a los soportes.El cable debe tener cierto alargamiento, ya sea por medio de un resorte o por medio de un peso unido a los extremos.
Se puede aplicar tensión constante al alambre por medio de un resorte con fuerza constante o un peso colgante al final. Una forma económica de obtener un resorte con fuerza constante es usar Bobinas de tarjetas de identificación.

Paso seis: software y generación de código G
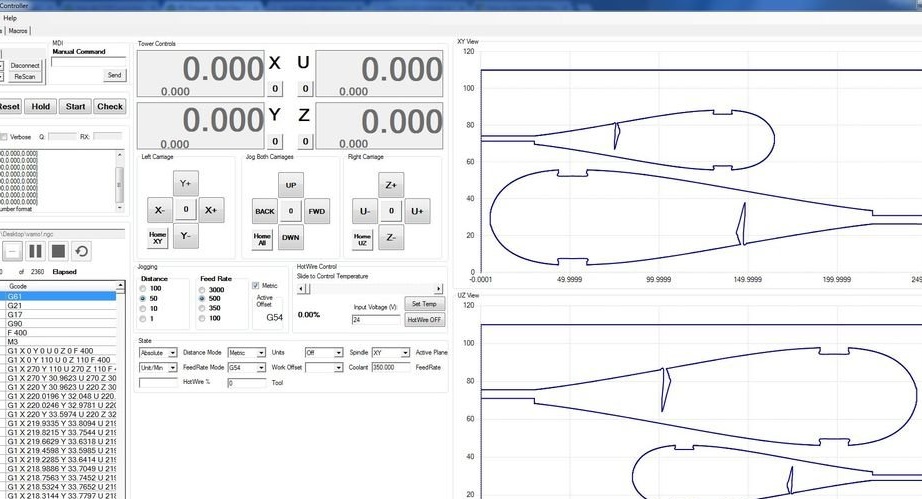
Controlador Grbl Hotwire
El asistente utiliza el panel de control Grbl, desarrollado por Garret Visser, que fue adaptado para cortar por Hotwire por Daniel Rassio. El panel tiene control de modo independiente para todos los ejes. También hay una herramienta de visualización, un gráfico "Gcode" y la capacidad de guardar sus propias macros. La temperatura de Hotwire se puede controlar usando M3 / M5 para encender / apagar y el comando S "xxx" para configurar el voltaje de salida, ya sea manualmente o usando la barra de desplazamiento en el software. El cable caliente debe estar conectado a la salida "D8" y debe ser alimentado por una fuente de alimentación conectada a la entrada "11A" en las uniones de línea.
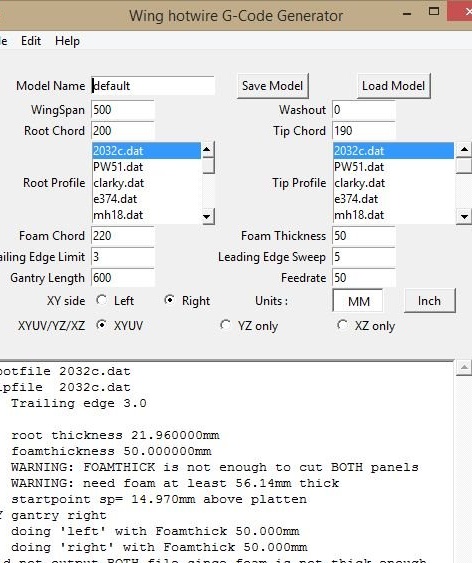
Generador de código g de ala
Generador de código g de ala es un programa para generar el código XYUV GY para el corte en caliente de alas de modelos de aviones. Se ejecuta en Python 2.7 y también puede integrarse con la interfaz LinuxCNC Axis. También hay una versión en línea. Esto le permite ingresar varios parámetros del ala. Existe una base de datos de perfiles aerodinámicos en formato .dat. Los nuevos perfiles se pueden importar de la misma manera.
Este software es fácil de usar y admite capas de las alas en la misma pieza de espuma para ahorrar material. El código G de salida se puede enviar a la máquina a través del controlador Grbl.
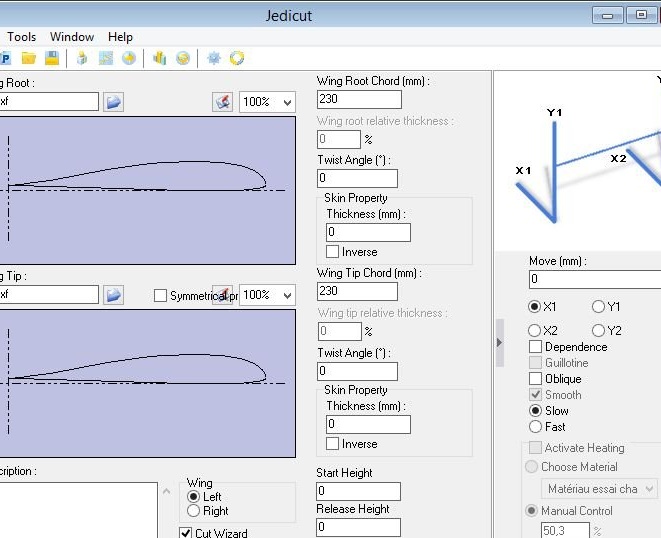
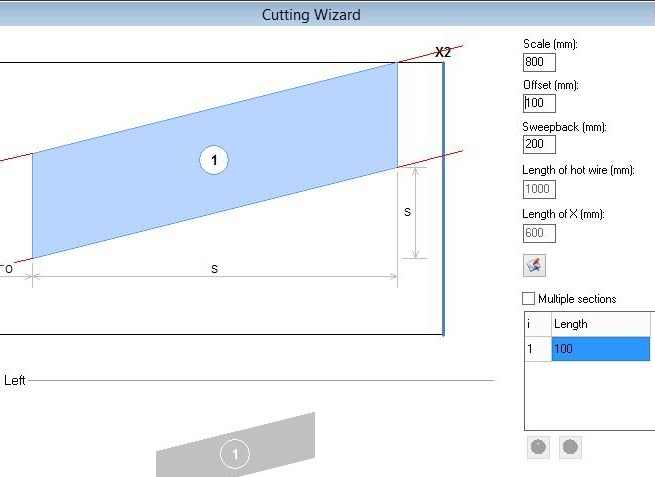
2.4 Jedicut
Jedicut - Este es un programa genial que puede realizar tanto CAD / CAM como las funciones de un controlador de máquina. También hay un complemento para generar código G. Este no es el programa más fácil de configurar. Algunas de las opciones y mensajes de error están en francés, pero si trabaja con ellos durante algún tiempo, puede hacerlo funcionar.
El código G Wing genera códigos G en modo absoluto, que se ejecuta en Grbl sin ningún problema, pero Jedicut genera código G en modo incremental. El maestro tuvo dificultades en el primer arranque, cuando el automóvil simplemente se movía de un lado a otro. Si esto sucede, edite el código G para eliminar líneas innecesarias en el encabezado.
Tanto el código Wing G como Jedicut generan código G con algunos códigos Grbl no compatibles en el encabezado. El controlador se mostrará en el monitor cuando ocurran tales errores. Edite el código G y elimine las líneas de código innecesarias.
Se incluyen códigos G de trabajo con ambos programas, úselos para verificar el controlador.
Jedicut.rar
winggcode.rar
Séptimo paso: ajuste de la velocidad de alimentación y la temperatura.
A diferencia del fresado convencional, el alambre corta por fusión de espuma. Cuando el cable permanece en una posición durante algún tiempo, el material circundante continúa derritiéndose. Esto aumenta el surco del corte y provoca imprecisiones en el tamaño. Hay dos variables que afectan el ancho del corte.
Velocidad de avance de corte.
Temperatura del cable.
La velocidad de alimentación de corte es la velocidad a la que el alambre atraviesa el material, preferiblemente en mm / min. Cuanto mayor sea la velocidad, menor será la ranura, pero mayor será la temperatura requerida, así como la tensión en el cable debería ser suficiente. Las buenas velocidades de arranque son de 350 a 500 mm / min.
La temperatura del alambre debe ser ligeramente más alta que la temperatura de fusión de la espuma. La temperatura es controlada por la corriente que fluye a través del cable.
Existe un software que permite el control PWM del cable para calentarlo en los momentos correctos con el fin de optimizar la velocidad de alimentación de corte. La temperatura del cable está determinada por el cuadrado de la corriente por la resistencia.
Hay un especial calculadoradonde puedes hacer todos los cálculos necesarios.
Paso ocho: operación de la máquina
El proceso comienza con un diseño que se exporta como un archivo DXF. Este archivo luego se importa al software CAM y se emite como un código G. La máquina está encendida y calibrada. El material se coloca en un banco de trabajo y se establece la posición inicial. Ejecute el archivo de código G y vea cómo el dispositivo hace todo el trabajo por usted.
Según el maestro, la máquina es fácil de fabricar y facilita el trabajo de los modelos de aviones.




En el video a continuación, puede ver un ejemplo de la máquina.