

Saludos los habitantes de nuestro sitio!
Esta vez AlexGyver, el autor del canal de YouTube del mismo nombre, sobre las vacaciones, que, por cierto, no nos gusta, decidió repetir Proyecto Adafruit - un ojo biónico que se inserta en las gafas de un soldador de gas.

Desde el punto de vista del código, este proyecto terminado no es absolutamente interesante, el autor estaba interesado en el mecanismo, a saber, su sistema de coordenadas.
Volveremos a esto, pero un poco más tarde, pero primero, recopilemos todas las mecánicas y conectemos todo electronica componentes.
Para repetir este proyecto necesitarás:
1) Gafas de soldador de gas. Puedes usar tanto metal como plástico.

El plástico ciertamente se ajusta mejor, pero por supuesto no puede presumir de calidad. Específicamente, en este caso, hecho de plástico, los lados literalmente se cayeron inmediatamente y el autor tuvo que pegarlos.

Tales gafas se pueden comprar en la tienda vendiendo herramientas o materiales de construcción. El autor los compró en la tienda All Instruments.
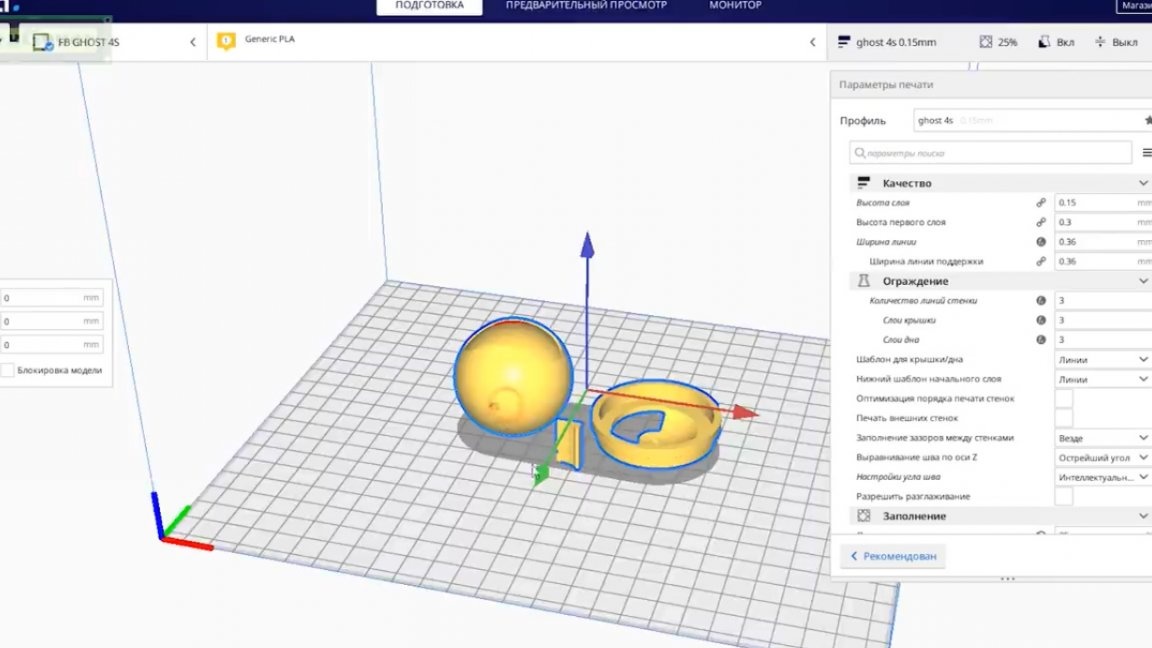
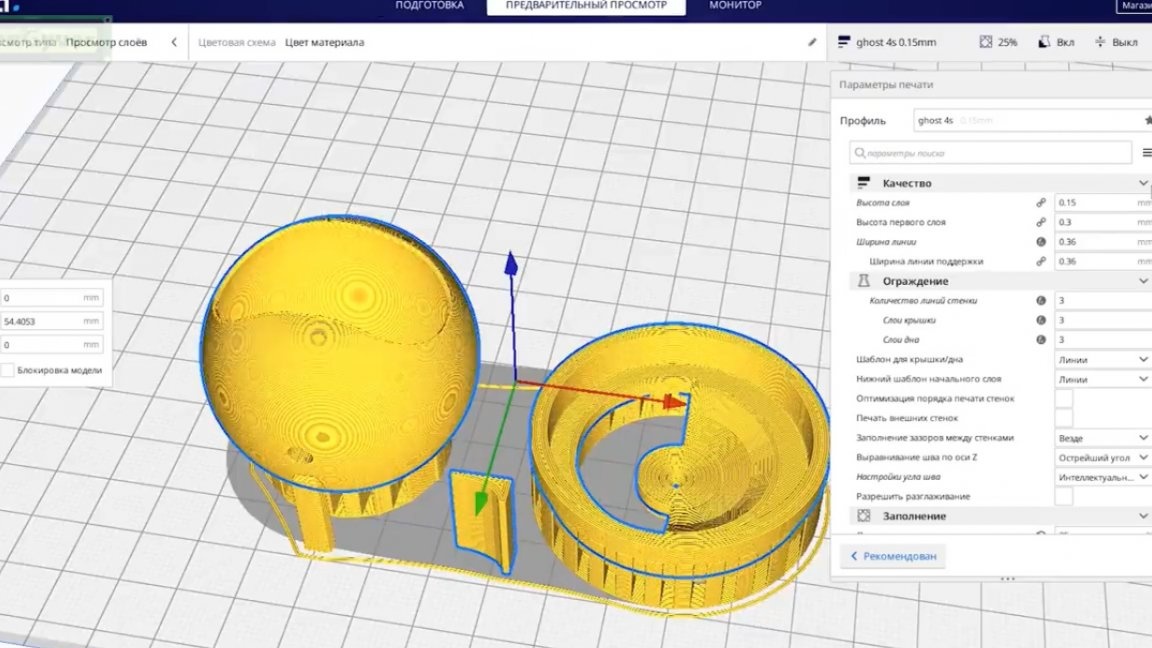
2) A continuación, necesitamos estos impresos en Impresora 3D repuestos
El autor imprimió los elementos con plástico PLA blanco en la nueva impresora 3D flyingbear ghost 4s de 32 bits. Archivo contiene los 3 modelos a la vez. La impresión es necesaria con soportes.

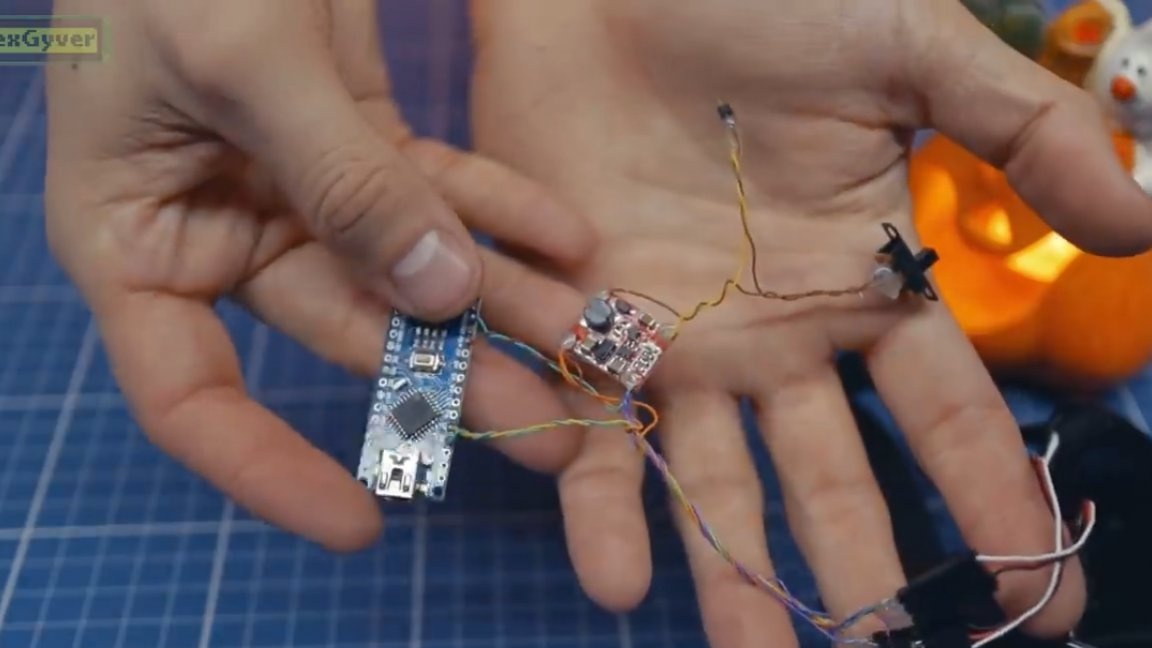
3) El siguiente componente necesario para nuestro proyecto especial de Halloween es la plataforma Modelos Arduino Nano.

4) También requerido batería de iones de litio:
5) Boost convertidor dc-dc (hasta 5V);
6) Interruptor:

7) Micro servos, pero no 9 gramos estándar, pero aún menos:
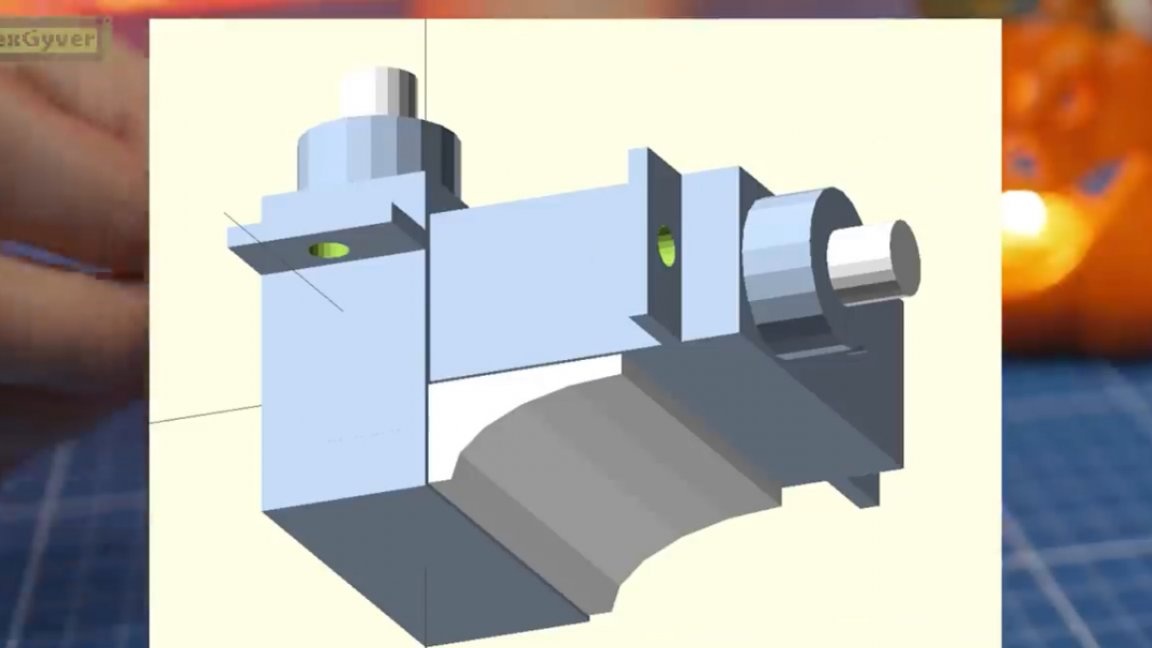
Entonces, con los componentes necesarios, más o menos resueltos, comencemos a ensamblar el dispositivo. Primero, necesitamos montar las unidades de la siguiente manera:
Aquí hay una imagen más comprensible:
Eliminamos la pegatina, y con la ayuda de superglue conectamos todo esto.


Por cierto, los servos chinos parecen ser ligeramente diferentes de los de Adafruth, y debes pegarlos así, con un pequeño desplazamiento:
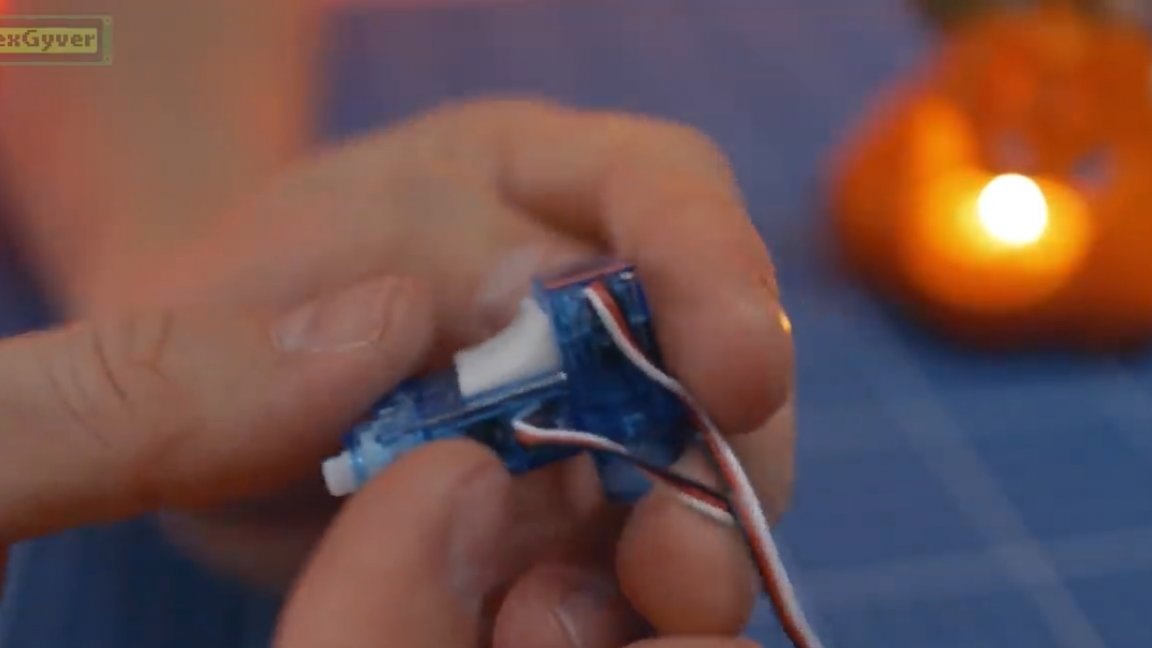
Deben retirarse las orejas, interferirán.
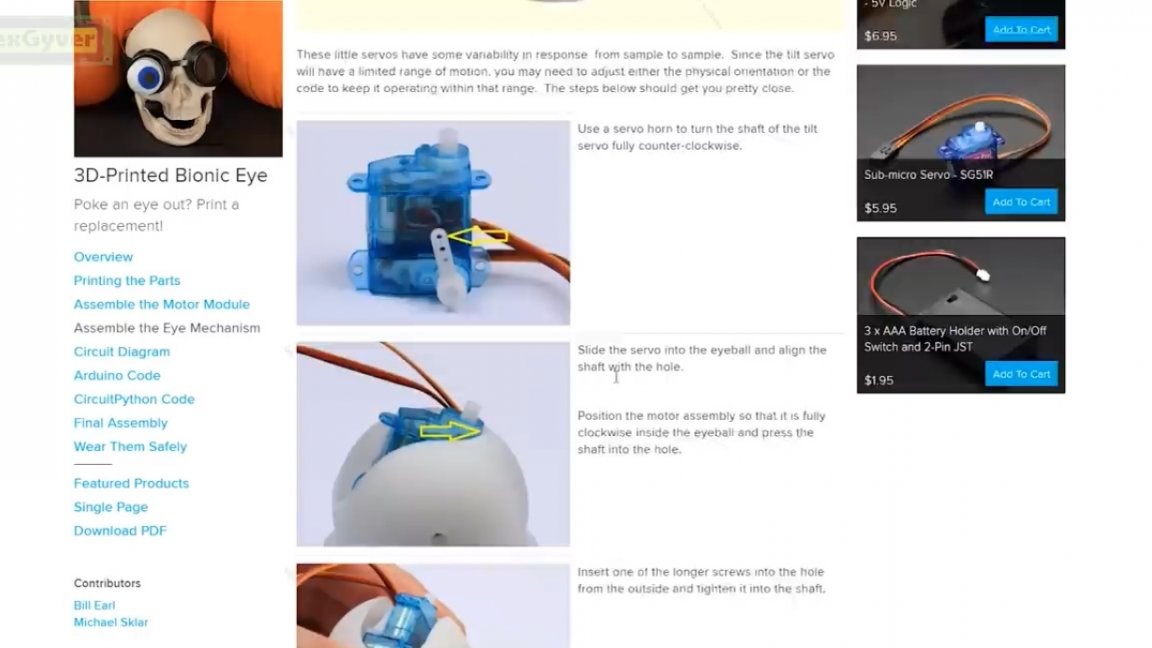
Luego, a la unidad inferior, enganchamos el balancín y giramos el eje en sentido antihorario.

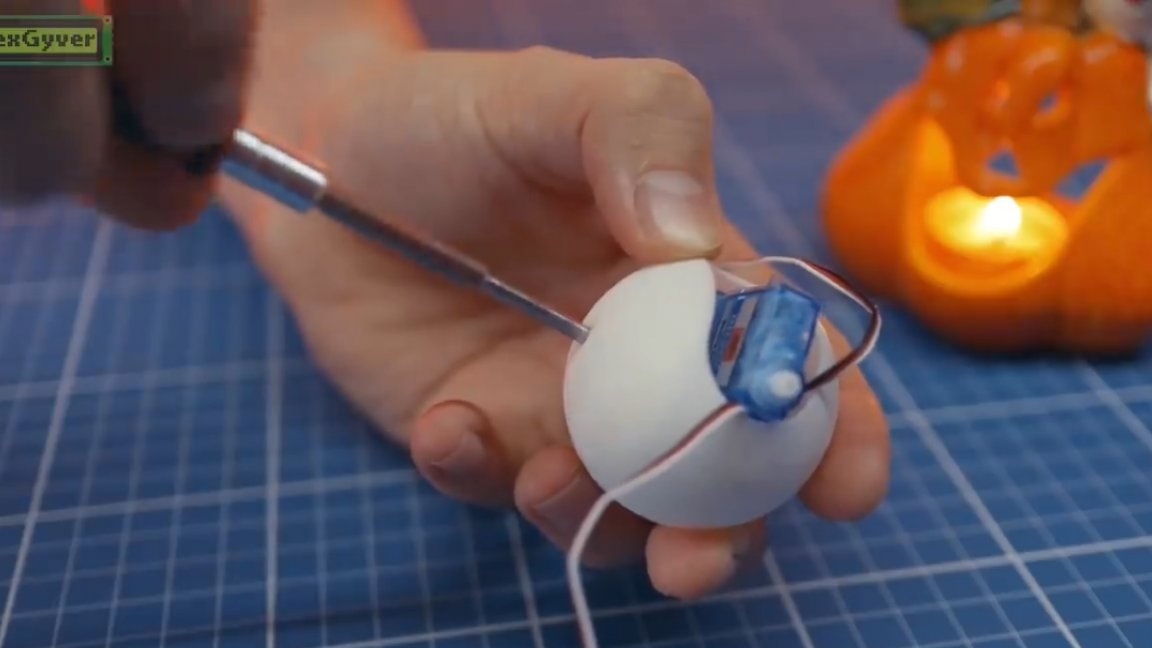
Inserte los servos en el preimpreso en Impresora 3D en blanco (ojo)
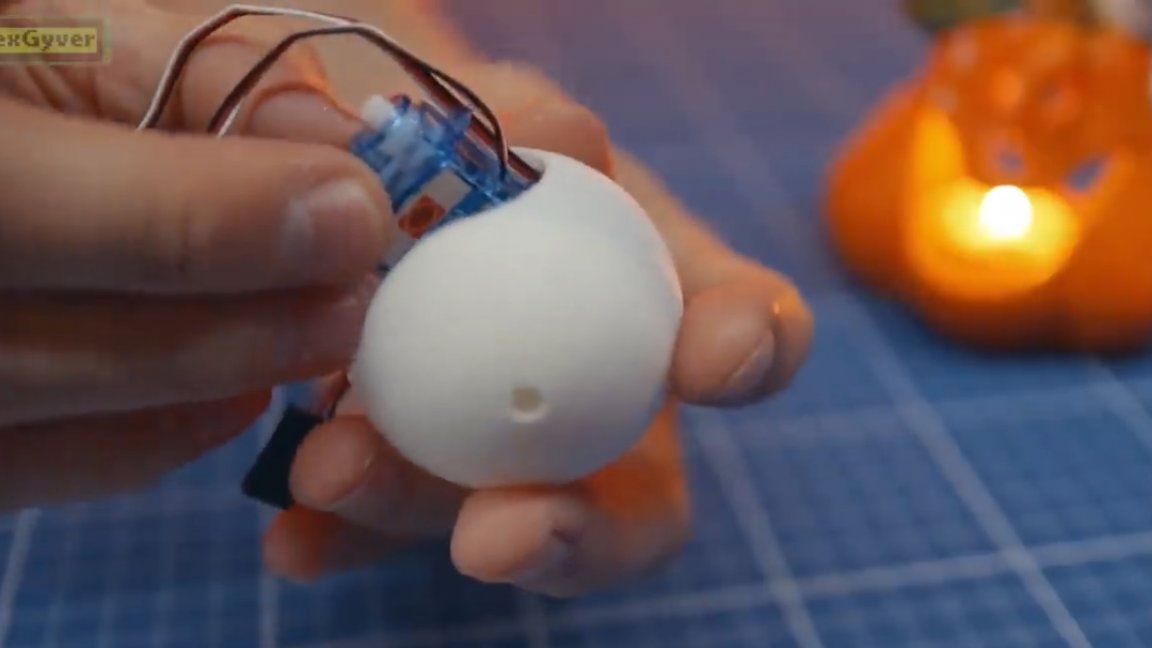
Nos topamos con el disco sobresaliente hasta el borde e insertamos el eje de salida en el orificio dentro del ojo.

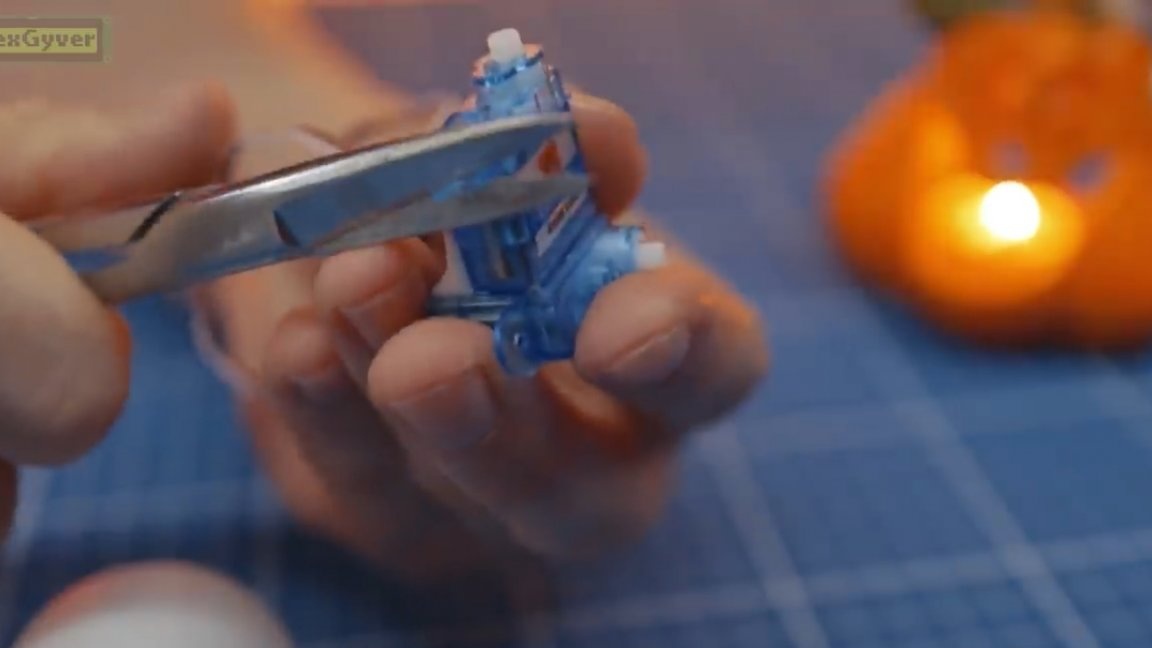
El tornillo largo completo debe acortarse un poco. Esto se puede hacer con pinzas.

Luego, usando un tornillo acortado, arreglamos la unidad interna.
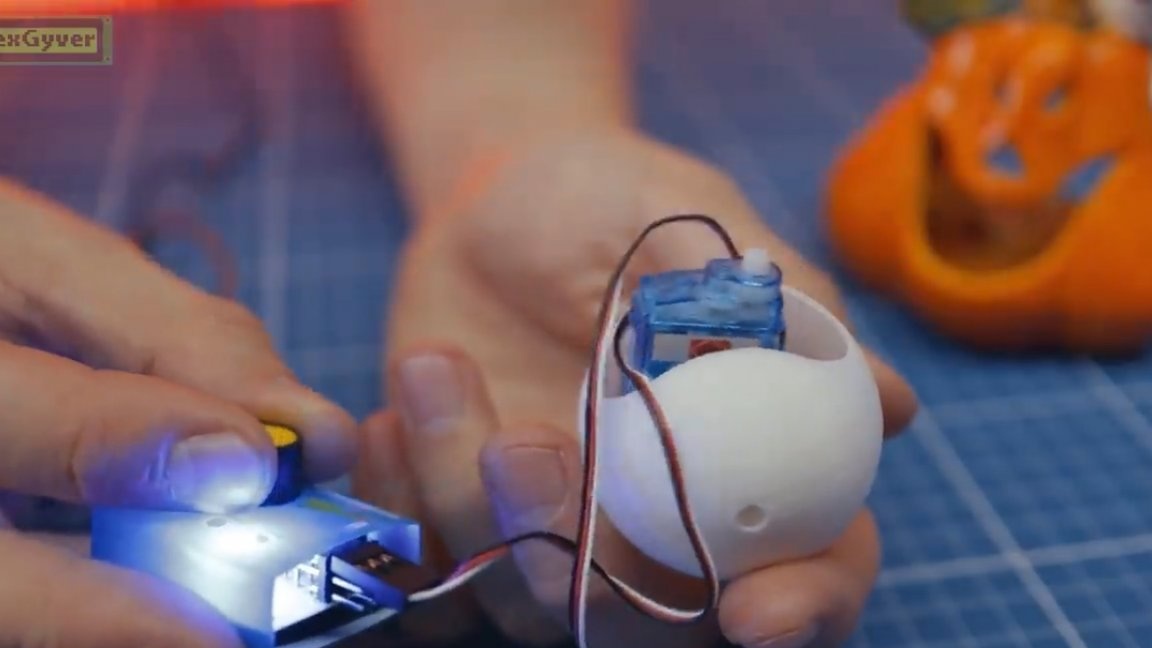
Si tiene un servo tester, puede verificar la operatividad del mecanismo resultante.
Luego conectamos la segunda parte del ojo al eje del segundo accionamiento y también lo sujetamos.

Estamos convencidos del rendimiento general (deberíamos trabajar juntos).


Especialmente para este proyecto, el autor escribió un código simple que gira suavemente las unidades en un ángulo aleatorio. Pero el centro del ojo estaba ligeramente sesgado, por lo que encontramos el centro real y dibujamos la pupila.

Bueno, dado que este es un proyecto de vacaciones y las vacaciones son bastante específicas, hagámoslo un poco más terrible.

Luego, inserte la parte resultante en las gafas.

Si no se inserta, es necesario biselar un poco.

Luego ponemos todo junto.


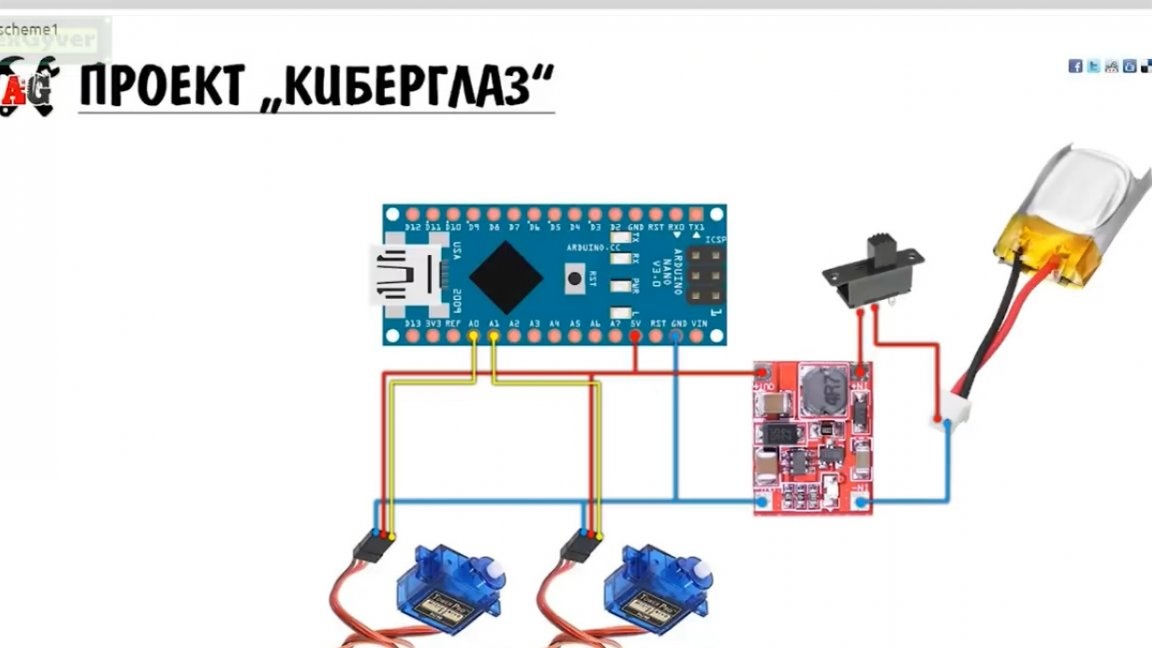
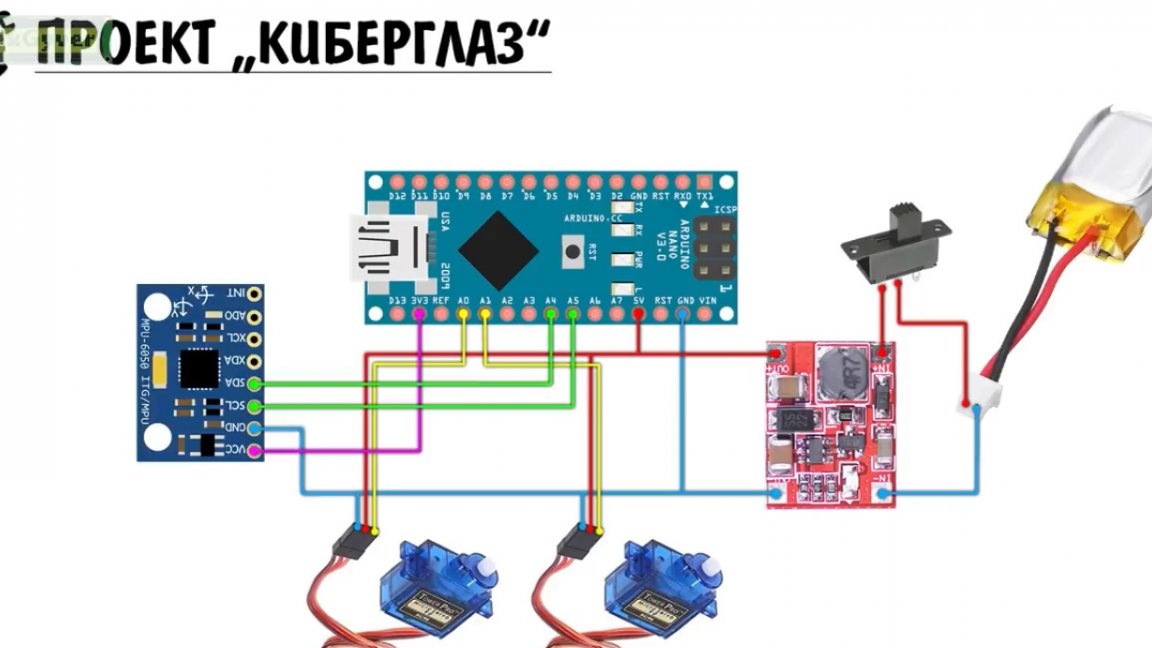
A continuación, conectamos todos los componentes de acuerdo con el siguiente esquema:
Todo está listo, pero ahora tenemos que cada unidad se eleva a un ángulo aleatorio y, en principio, puede dejarlo así.

Pero recuerde que al principio del artículo se mencionó sobre el mecanismo y el sistema de coordenadas. Entonces, el mecanismo gira a lo largo de dos ejes, pero no a lo largo de los cuales gira el ojo humano. Nuestro objetivo es hacer que dicho mecanismo se comporte exactamente como el ojo humano. A primera vista, esto parece imposible, pero puede intentar llevar su sistema de coordenadas a la normalidad para que pueda colocar a la pupila en la posición deseada.
Entonces, tenemos dos ángulos, los denotamos por X e Y.

Y es el ángulo pequeño del ojo, y X es el ángulo de rotación del ojo en 180 grados.
Para lograr todas las posiciones posibles es necesario controlar ambos ángulos, y hay una especificidad. Comencemos con el más simple: movimiento circular con un radio máximo.
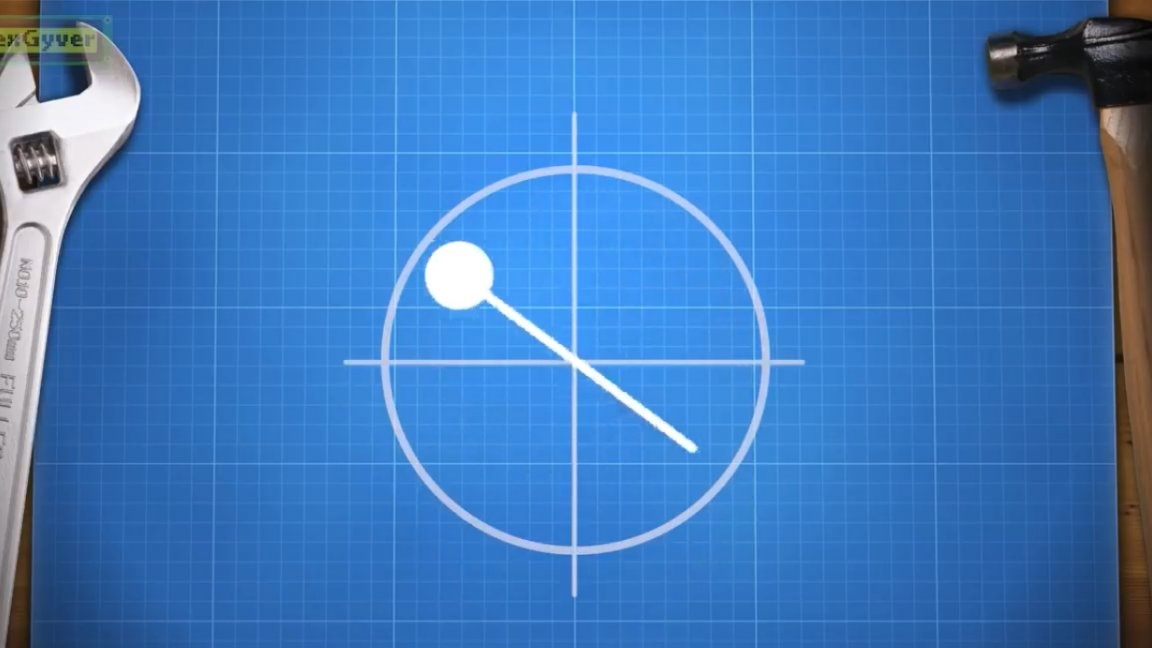
Pero no es tan simple como parecía. Por lo tanto, lo primero que hizo el autor fue un sistema de coordenadas polares en el que puede establecer el ángulo de rotación del ojo y el radio, es decir, la extracción de la pupila del punto central 00.
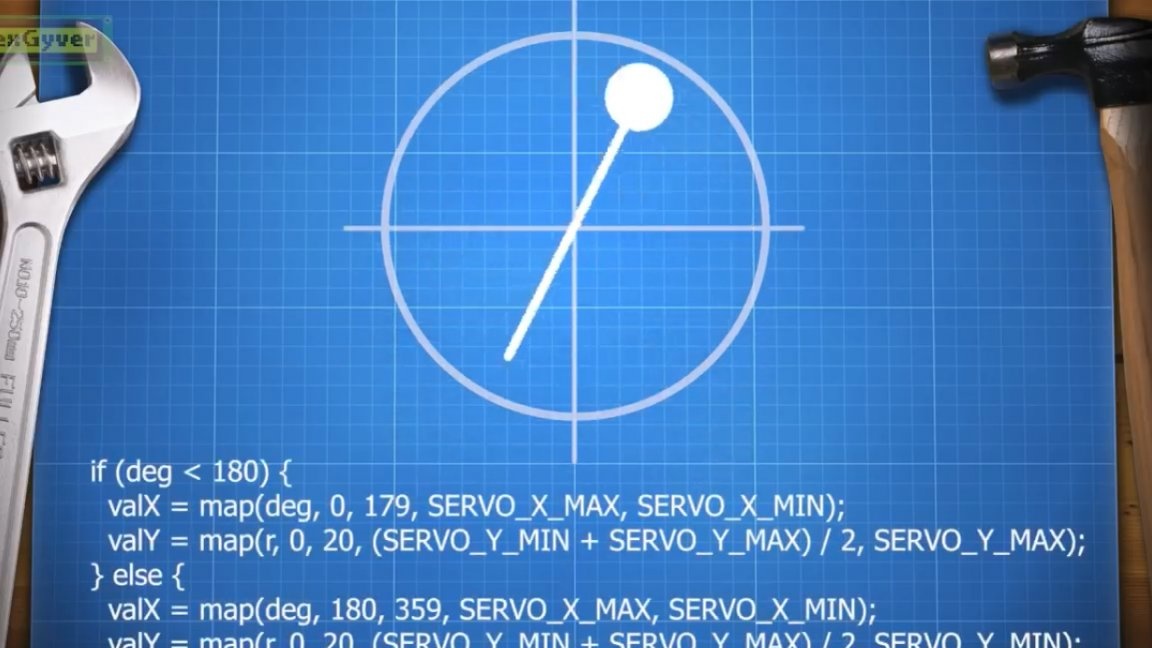

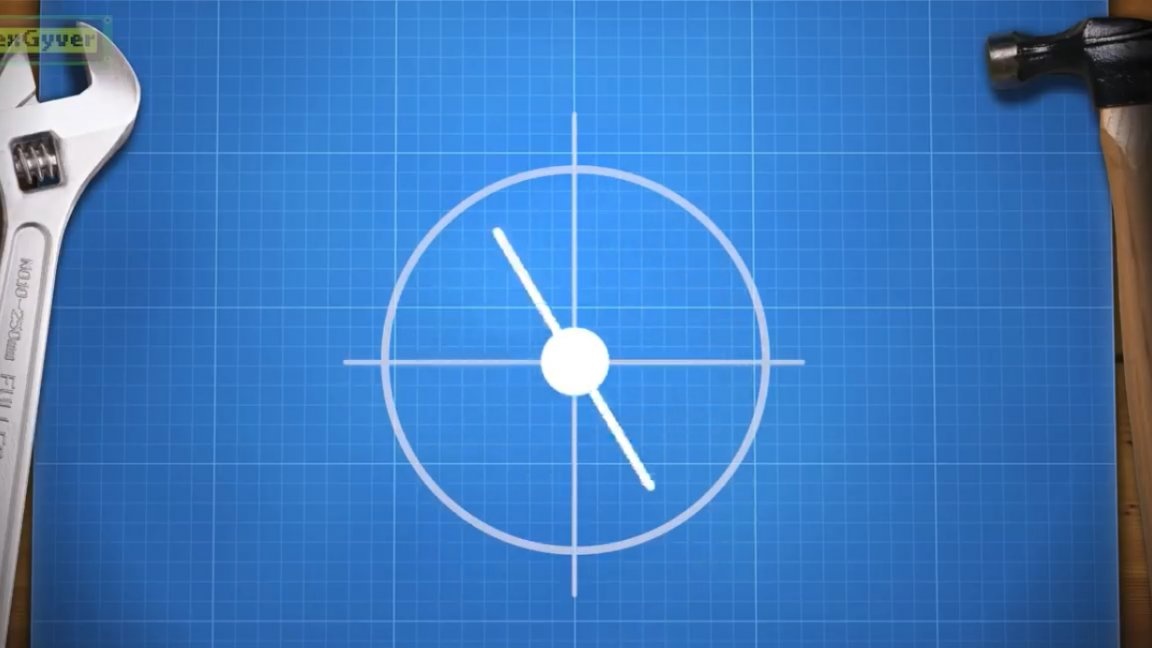
En el semicírculo superior, trabajamos desde la mitad del ángulo Y hasta su valor máximo, y en la inferior, desde el mínimo hasta la mitad. Ahora el movimiento del ojo se puede programar de una manera más interesante. Los movimientos en sí son aleatorios, pero ya están alrededor de la circunferencia.


Ahora soldemos todos los componentes electrónicos, todo está como en el diagrama:
Intentando encenderlo.
La indicación es. Ahora estamos ocultando todo esto en algún tipo de edificio (en este caso, el autor usó una caja debajo de "tic-tac").

Todos nuestros ojos cibernéticos están listos. Aquí hay una broma.


Pero sigamos con nuestra investigación teórica y traduzcamos el sistema de coordenadas polares a uno cartesiano, luego entenderé por qué.

Aquí todo es simple, la función atan2 nos ayudará, que devuelve el ángulo en radianes de –P a P, y la función hipot, que calculará la longitud de la hipotenusa en las mismas dos coordenadas, y la hipotenusa es el radio de nuestra función anterior.

Y de una manera tan simple, nuestro sujeto experimental ahora puede dirigir su mirada exactamente hacia donde la necesitamos (arriba, abajo, derecha, izquierda).

Entonces, ¿por qué se necesita esto? Esto es necesario para poder agregar giroscopiocon la ayuda de la cual el ojo girará en la misma dirección que la cabeza, lo que probablemente se verá bastante divertido. En realidad, el proyecto fue agregado giroscopio mpu6050, así es como se ve en el diagrama:
Cambie el código, asegúrese de que las lecturas del giroscopio desvíen el ojo. A través del filtro de forma natural.

Entonces, ¿qué obtenemos al final? El ojo está un poco retrasado detrás del giro de la cabeza, creando así el efecto de que gira a la derecha y te mira. Como resultado, aquí hay un pequeño proyecto matemático.

Firmware AQUÍ. Gracias por su atencion Hasta pronto!
Video del autor: