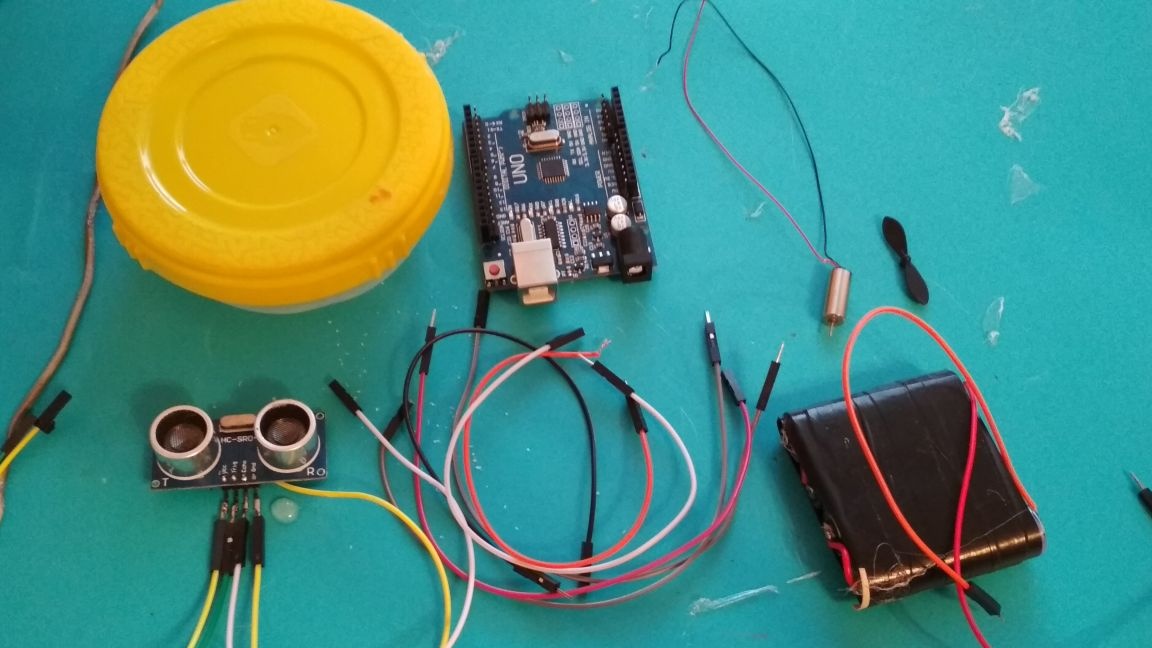
Y para un ventilador automático necesitamos:
pago Arduino uno (tomó aquí)
motor de baja tensión
-Papa-Mamá tipo cables
- Cables convencionales
cambiar
ultrasonido
recipiente de plastico
- hélice pequeña
- un perno de unos 5 cm de largo y 1 cm de ancho
tuerca para atornillar
- Batería de 6-12 voltios (uso 4 baterías de 1.5V conectadas en serie a las que se sueldan dos cables de madre a madre con la salida de la madre cortada
alambre grueso
De las herramientas que necesitamos:
soldador
pistola de pegamento
cuchillo de oficina
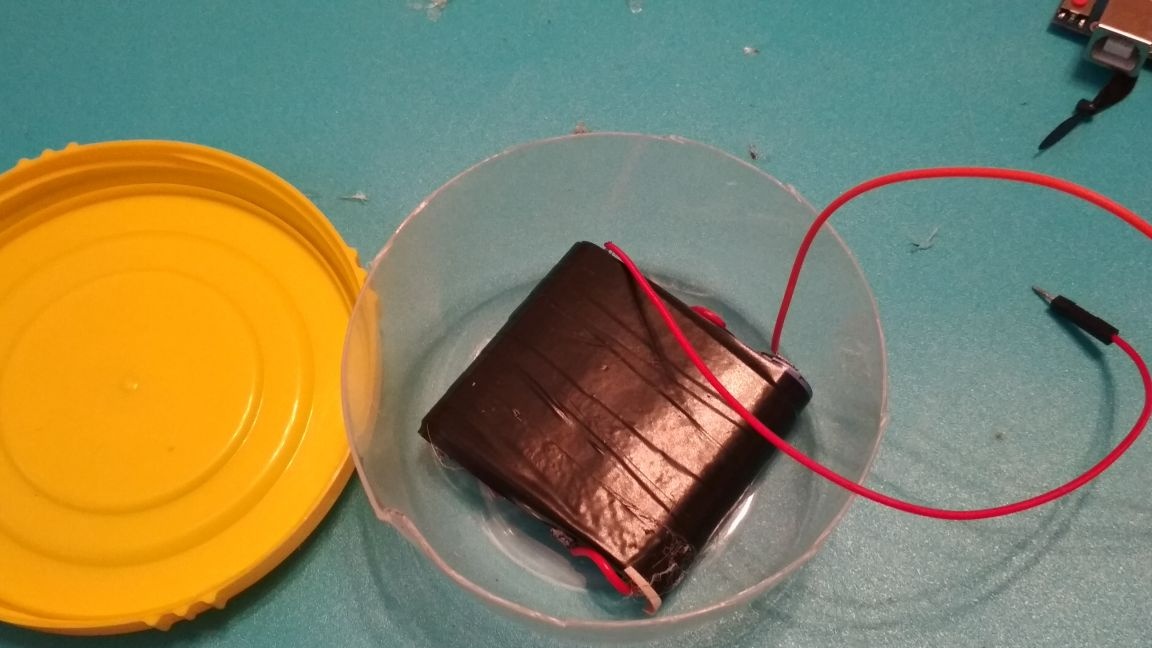
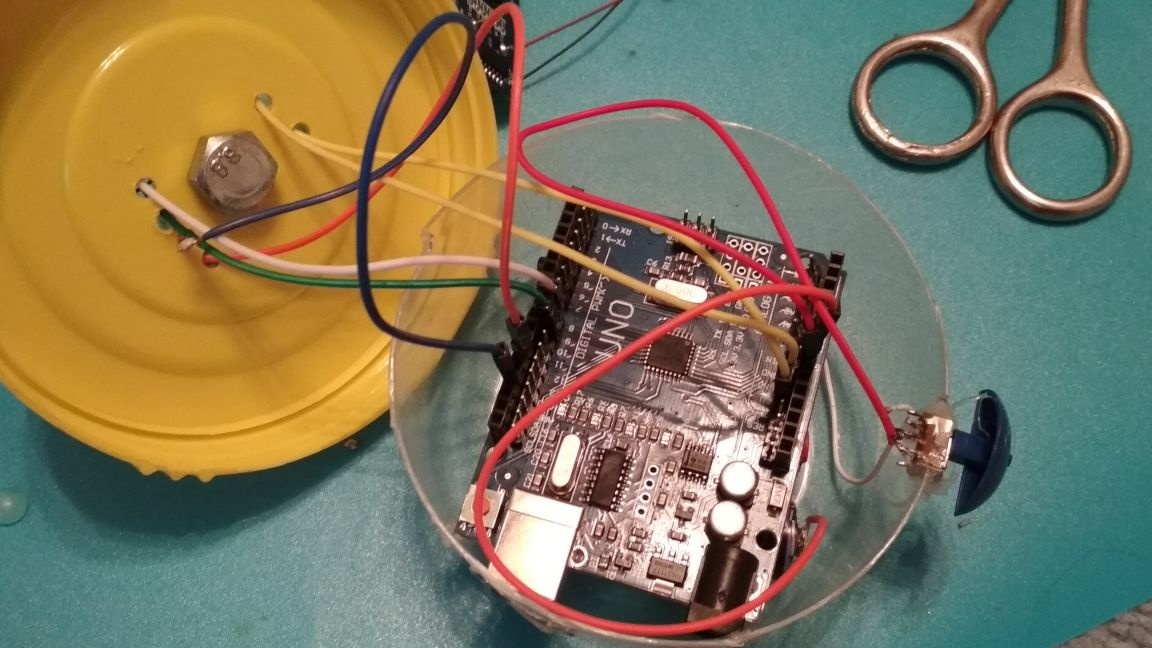
Entonces, en primer lugar, tomamos nuestra fuente de energía y la colocamos en el fondo del contenedor (uso el contenedor de precio fijo de 16 bits que me gusta)
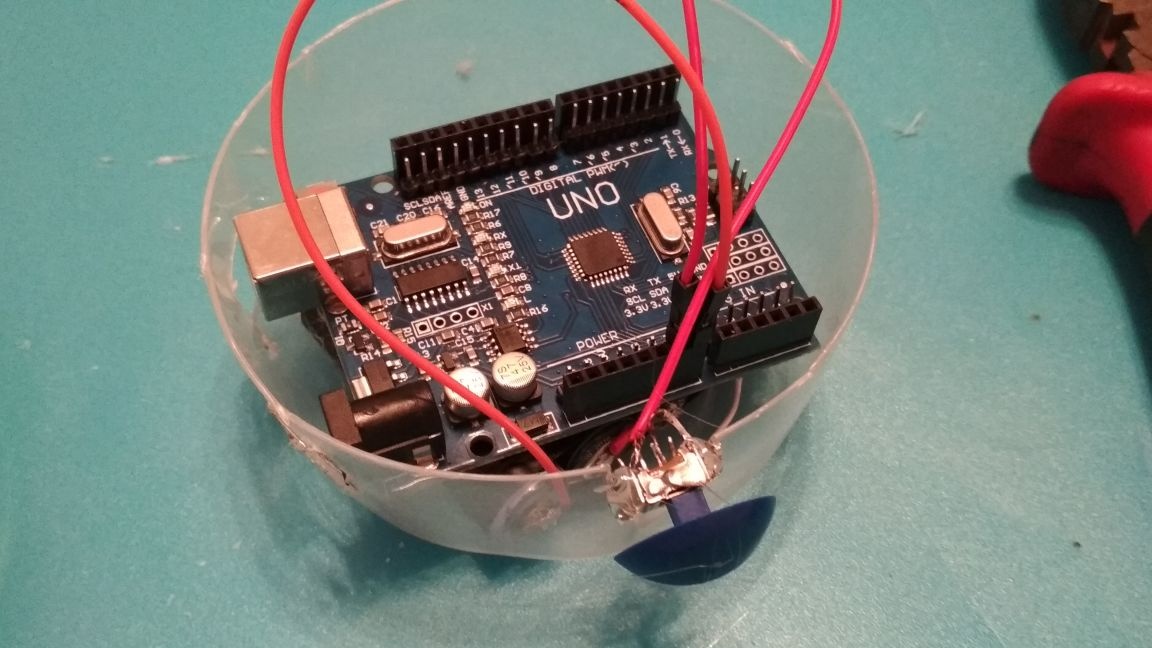
Luego colocamos la placa Arduino Uno en la parte superior:

Como la placa sale mucho, marque 2 agujeros para los conectores y recórtelos:

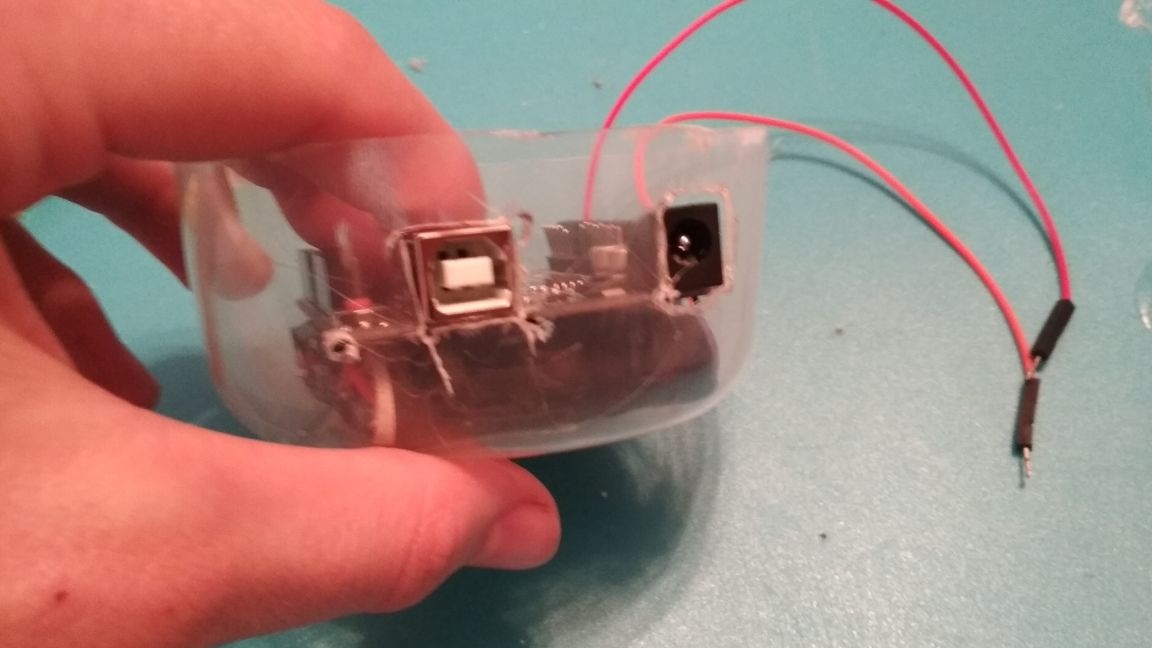
Agregamos un interruptor a la fuente de alimentación, luego conectamos la potencia positiva a la salida uin en el arduino, y menos a Gnd:
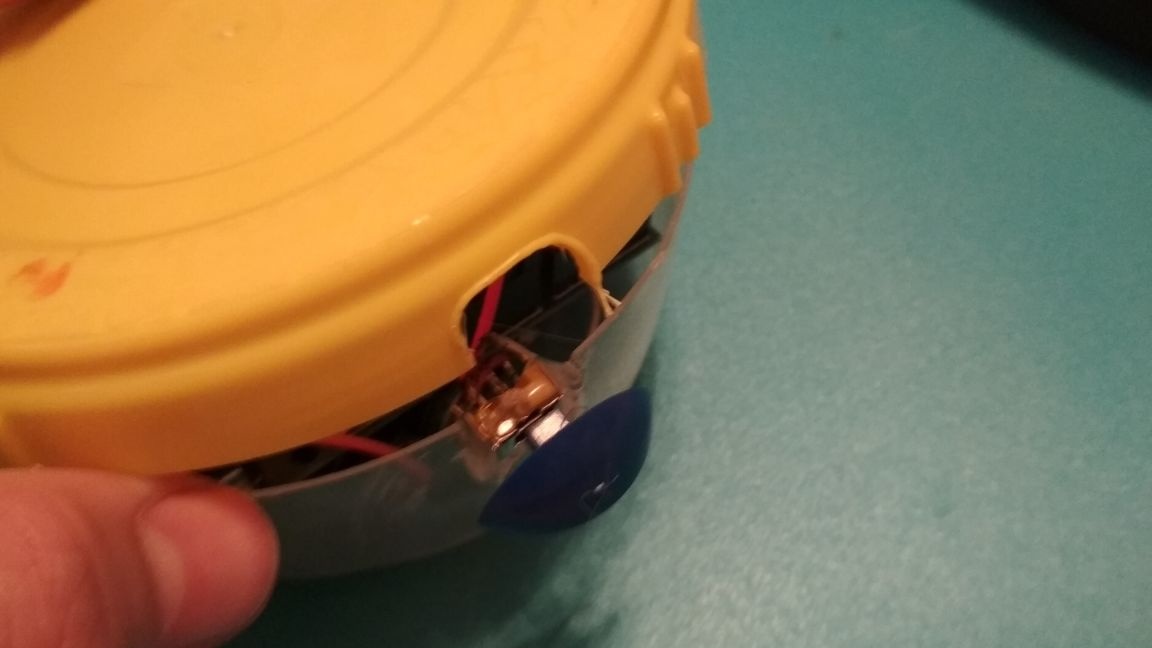
En el costado del contenedor (también en la tapa si es necesario), haga una ranura para el interruptor y péguelo allí:
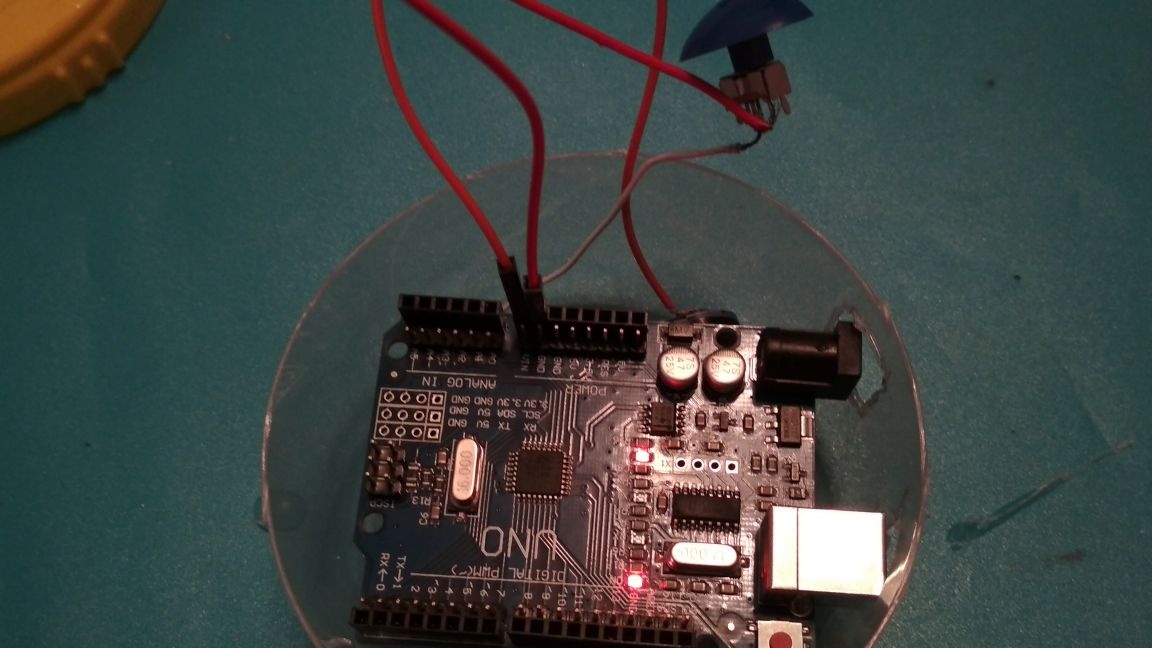
Si los LED rojos de la placa Arduino se iluminan cuando se enciende el interruptor, conectamos la alimentación correctamente.
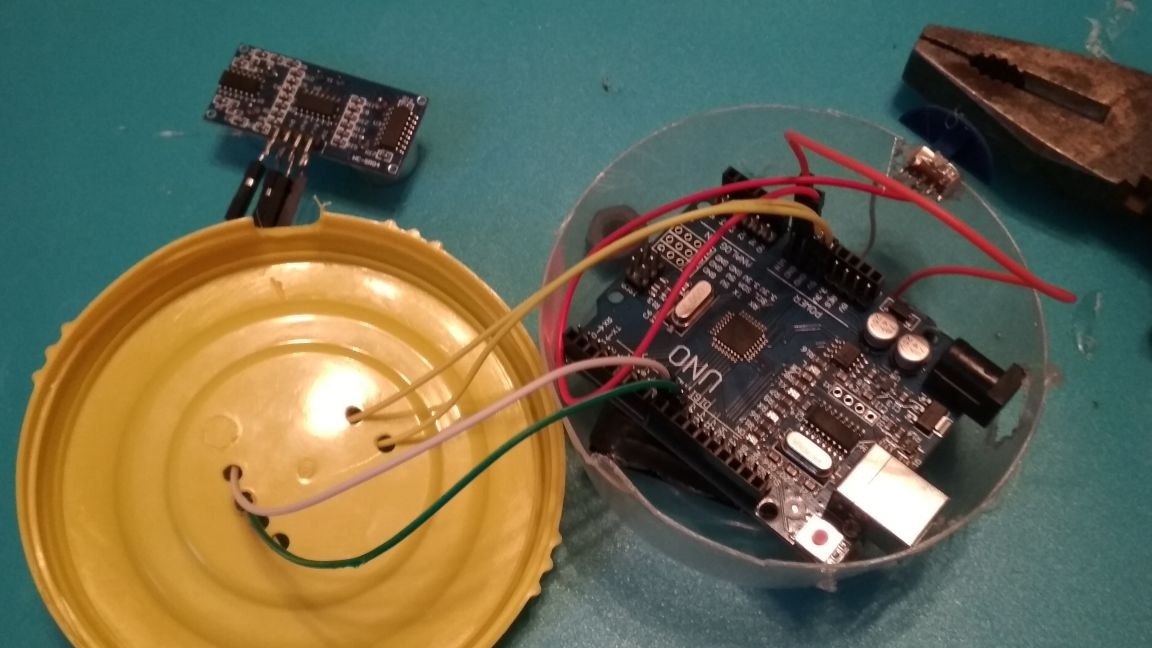
Tomamos un buscador de rango ultrasónico y soldadura a sus salidas (vcc, Echo, Trig, Gnd) cables tipo papá-mamá

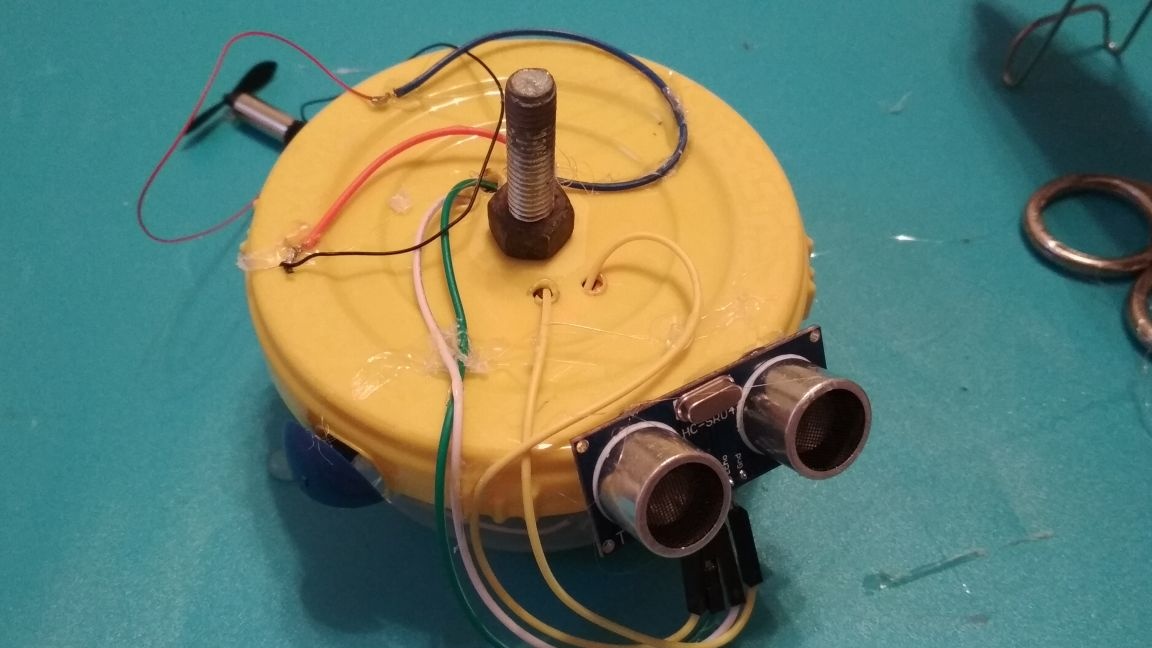
En la tapa del contenedor hacemos 6 pequeños agujeros, 2 debajo de los cables del motor, 4 debajo de los cables del sensor ultrasónico:

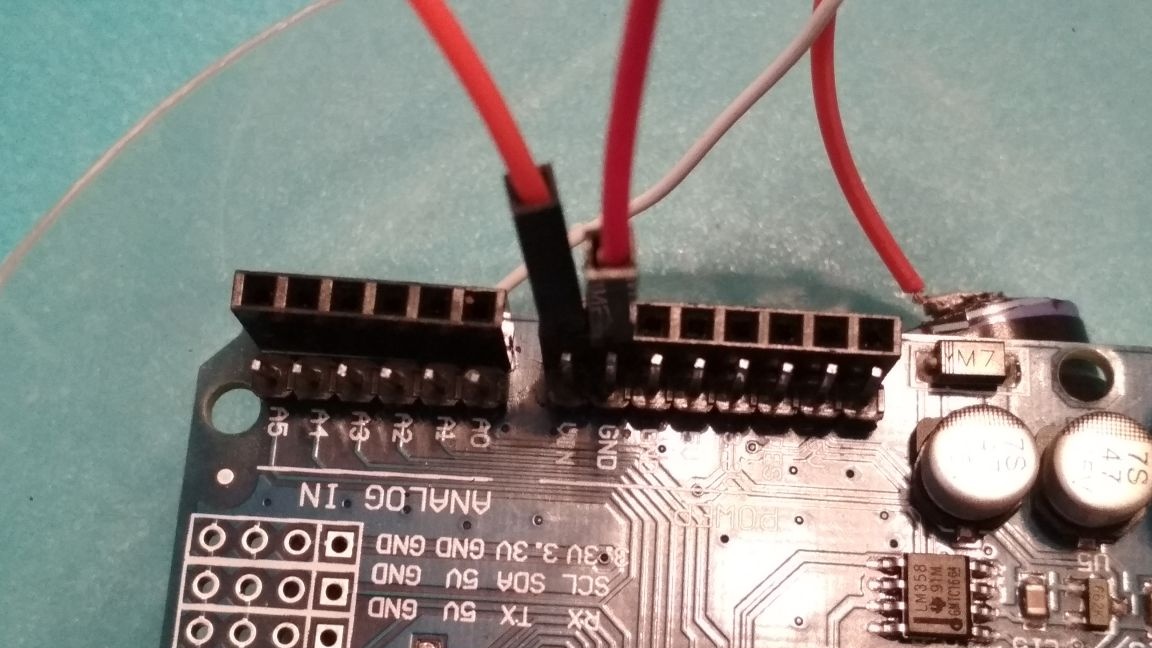
Pasamos los cables del sensor a través de los agujeros en la tapa, y los conectamos de la siguiente manera a la placa arduino: vcc a la salida 5 v, Gnd a Gnd, echo a 9 pin digital y trigon a 8
Ponemos una hélice en el eje del motor, usaré una pequeña de fábrica, ya que no hay otra, pero es mejor usar una hélice más grande, o incluso una casera:
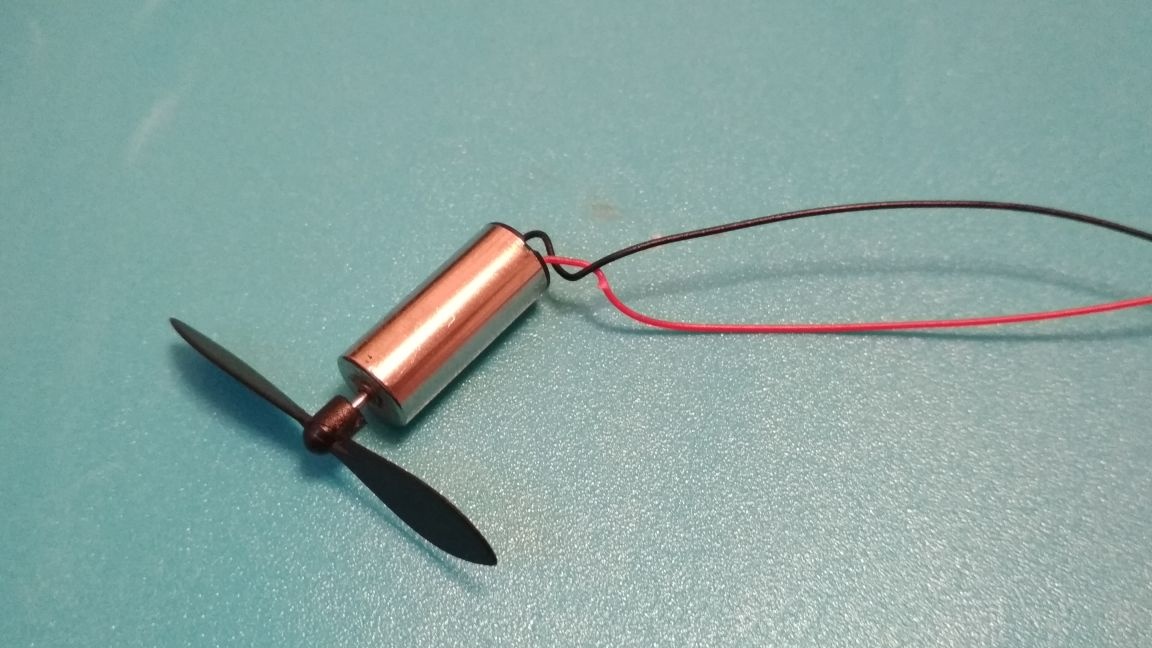
Suelde dos cables de papá a mamá al motor con una salida "mamá" precortada
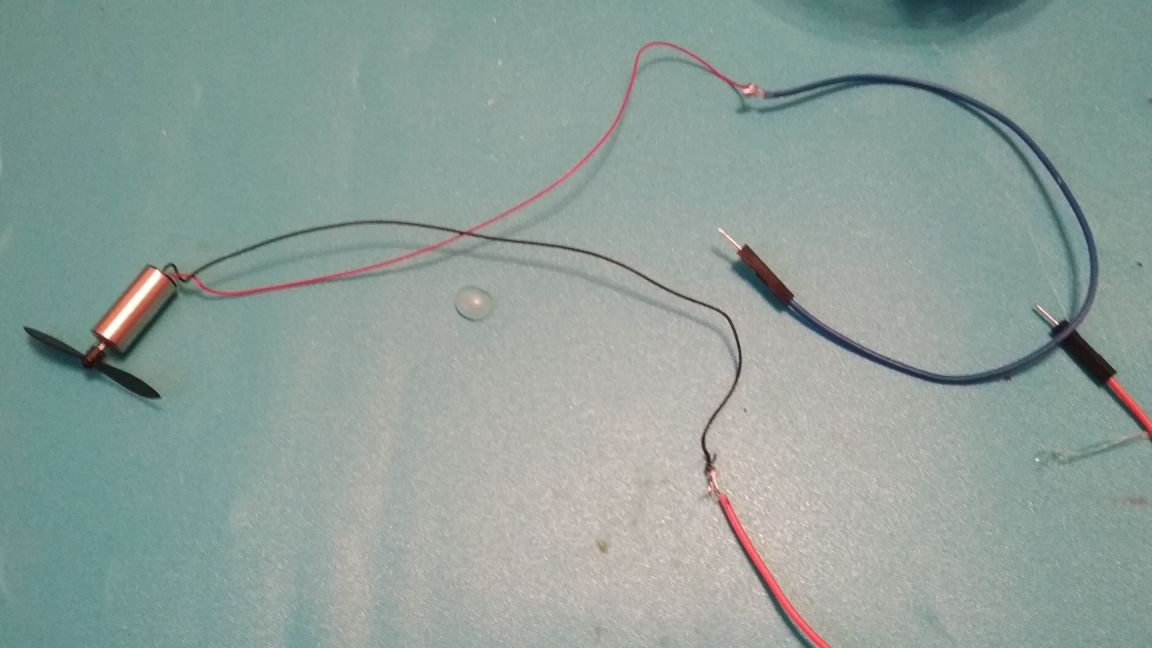
Pase los cables del motor a través de los agujeros restantes en la cubierta:

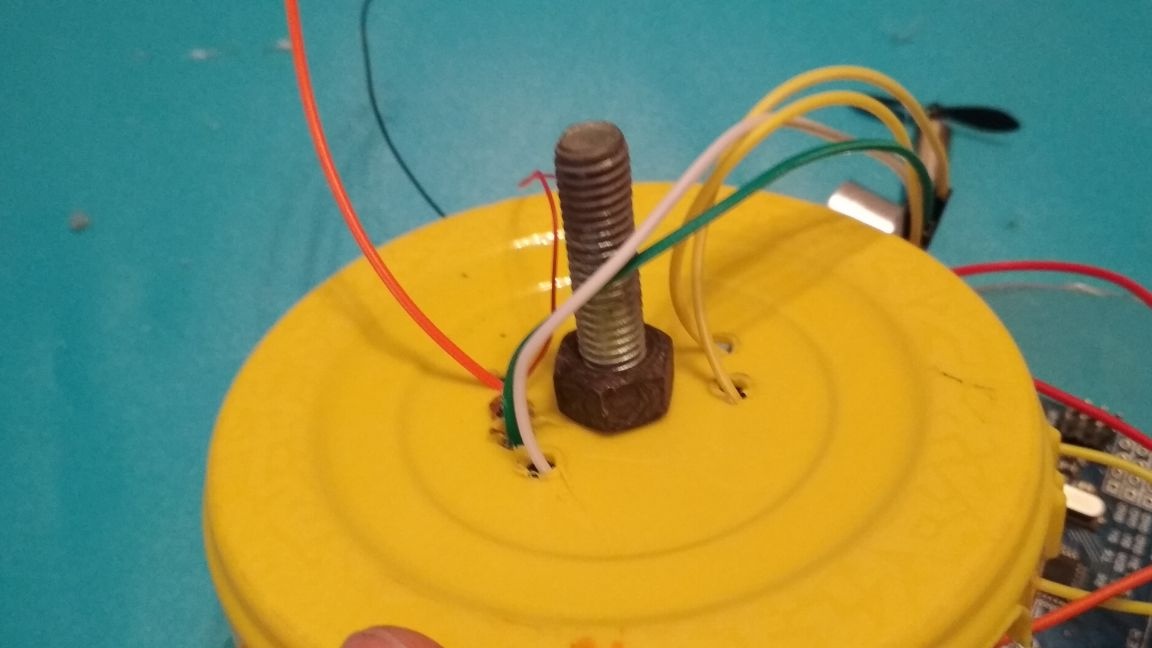
Tomamos un tornillo con una tuerca y, usando un taladro escalonado o un soldador, hacemos un agujero en la cubierta para el diámetro del tornillo:


Inserte el perno de abajo hacia arriba y apriete la tuerca:
Conectamos un cable del motor a la salida Gnd en la placa arduino, y el otro al décimo pin:
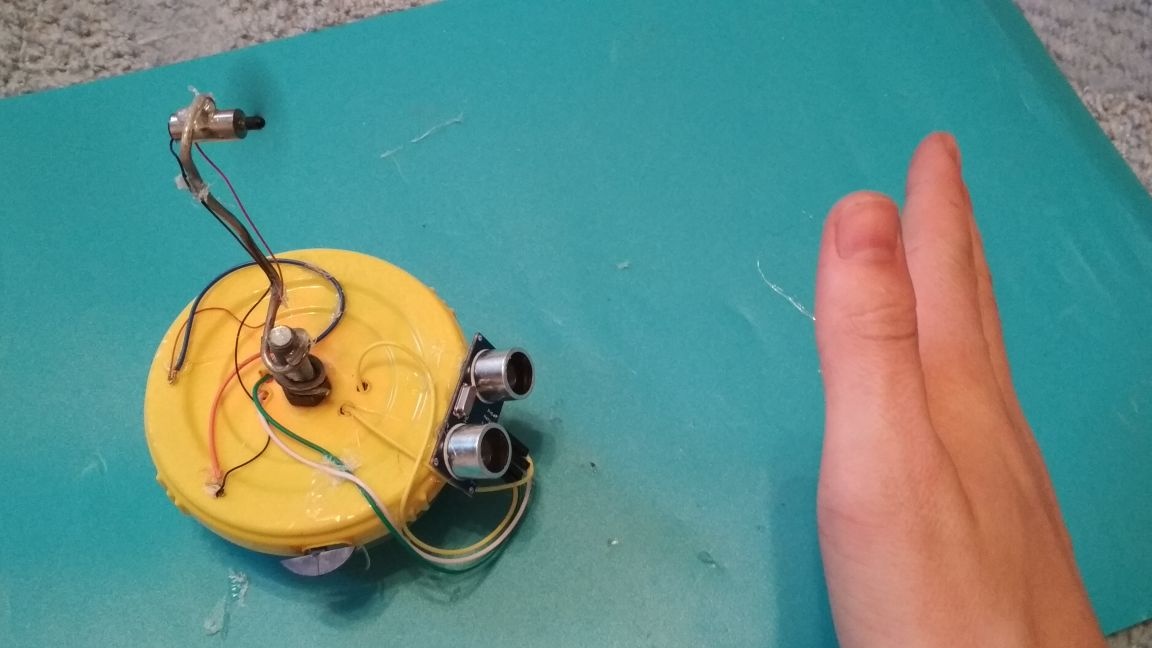
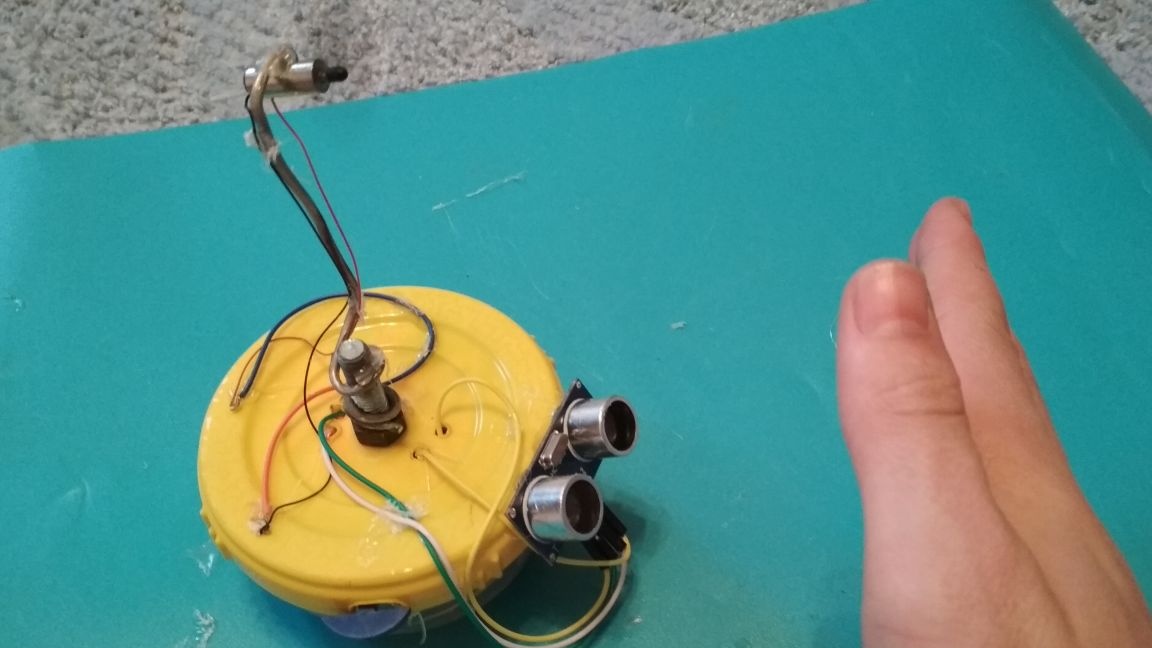
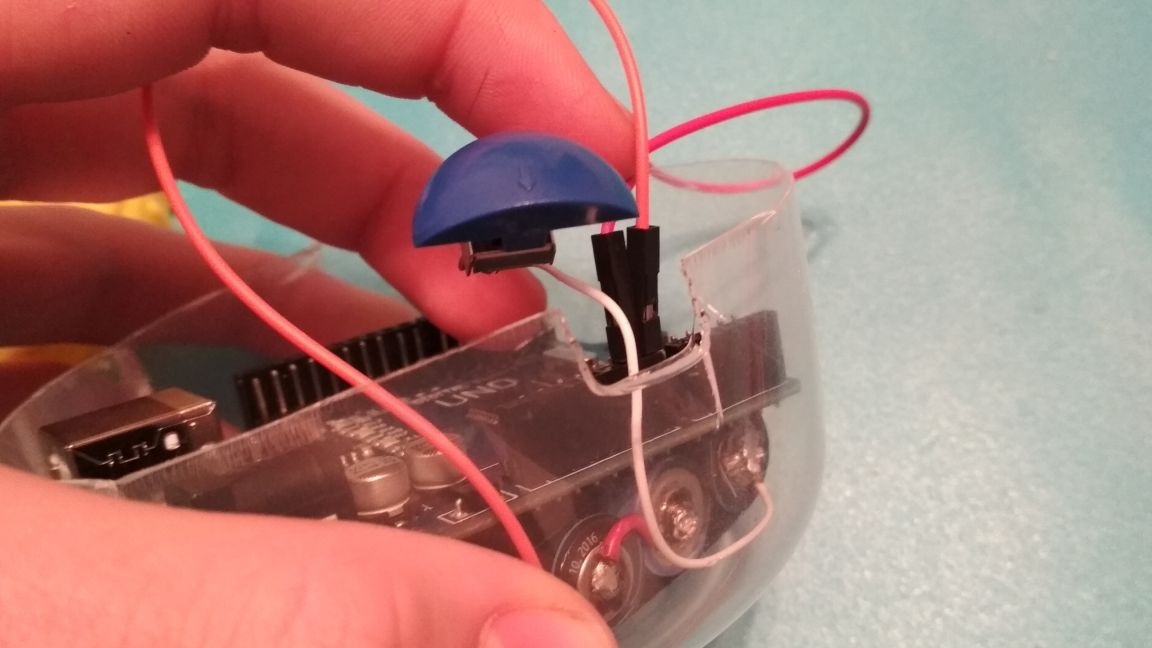
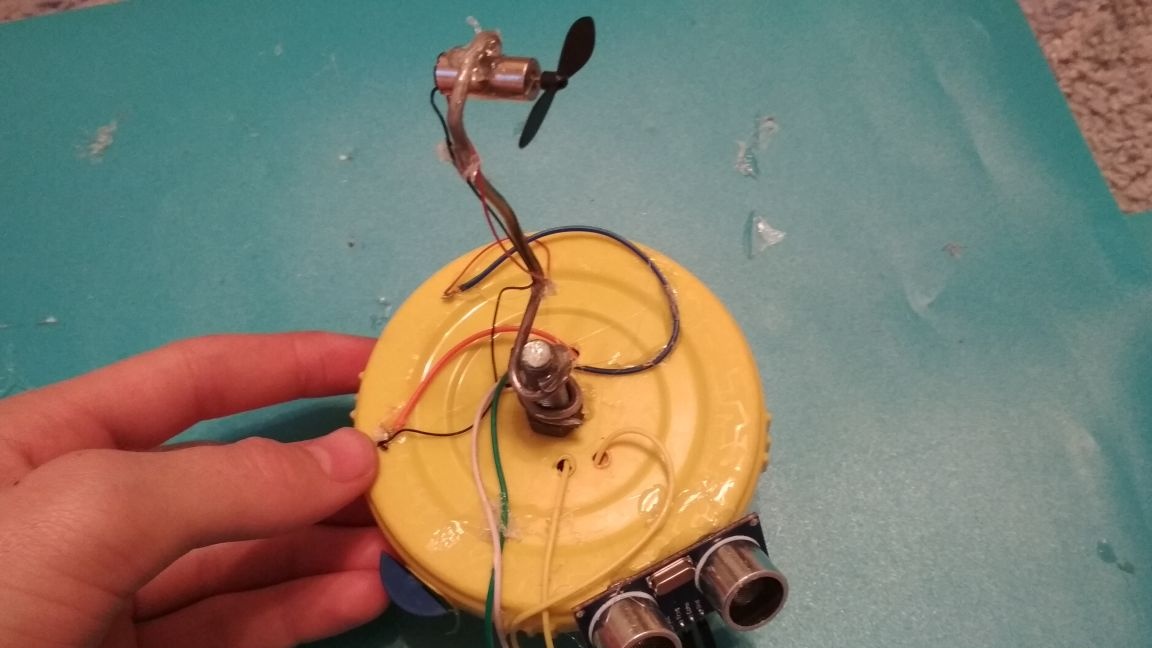
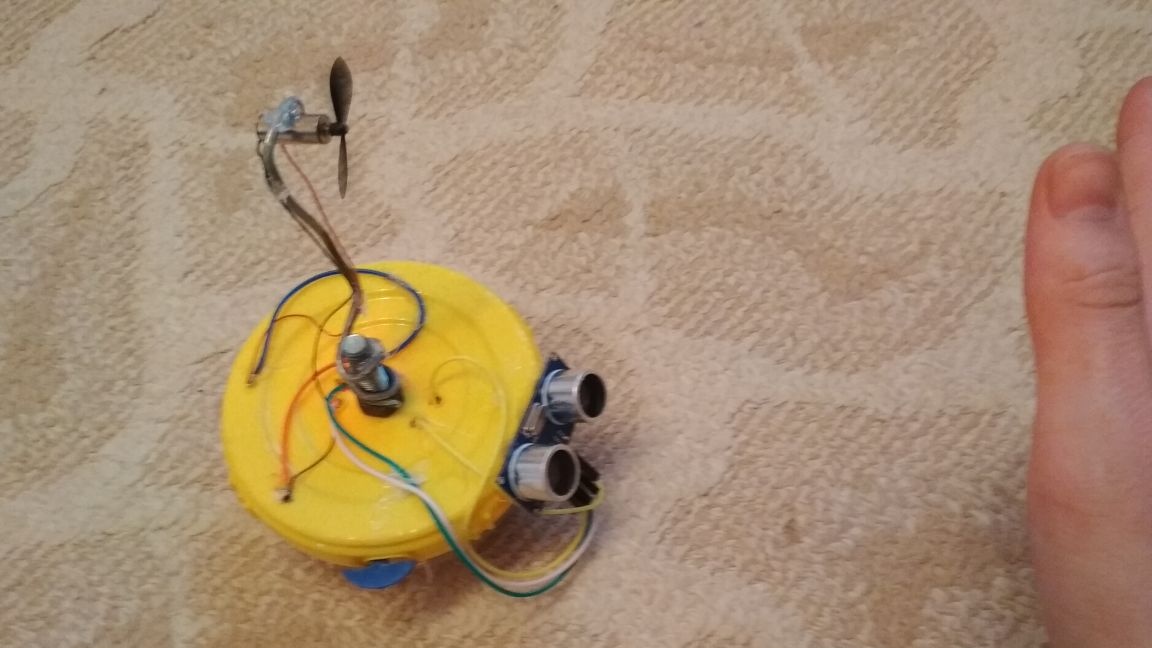
Ponemos la tapa y pegamos el telémetro ultrasónico, como se muestra en la foto, también pegamos todos los cables colgantes:
Enrollamos y pegamos un alambre grueso al perno:
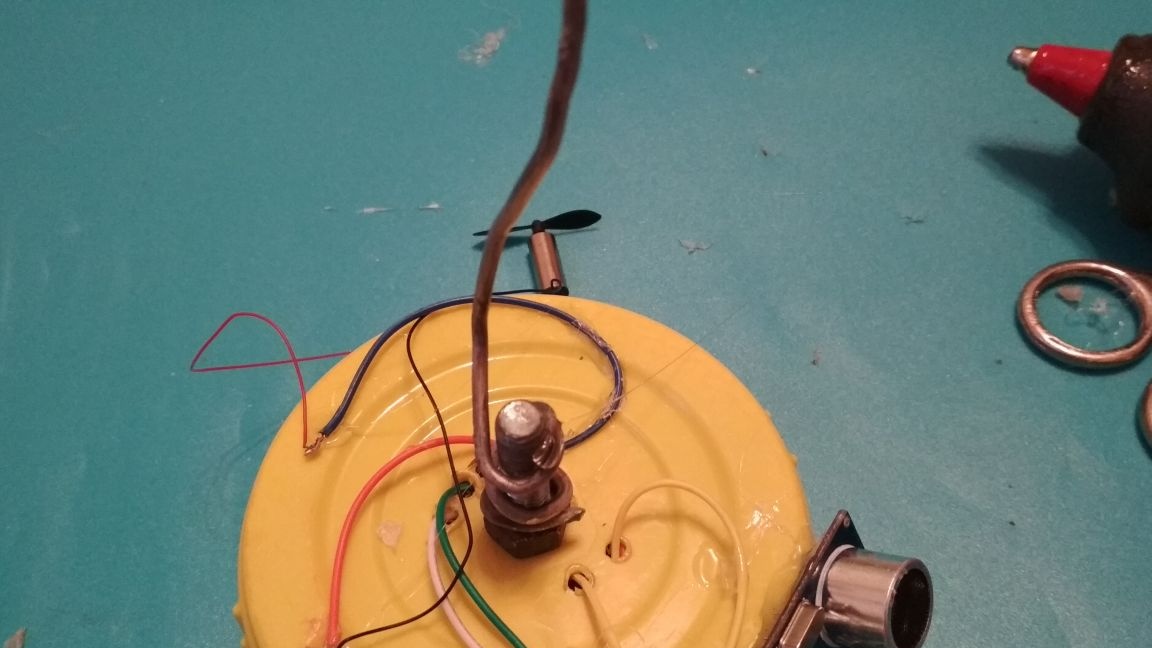
Sujetamos nuestro motor a la parte superior del cable, el cable actuará como una guía ajustable:
Ahora ha llegado el momento, para mí personalmente, el paso más difícil, o más bien para escribir el firmware, no necesita escribir nada, solo inicie la aplicación Arduino IDE, conecte la placa Arduino a la computadora con un adaptador especial, que generalmente viene con la placa, copie el boceto en el IDE de Arduino que se proporciona a continuación, en el programa hacemos clic en el botón "descargar" y luego el boceto debe cargarse en la placa de arduino.

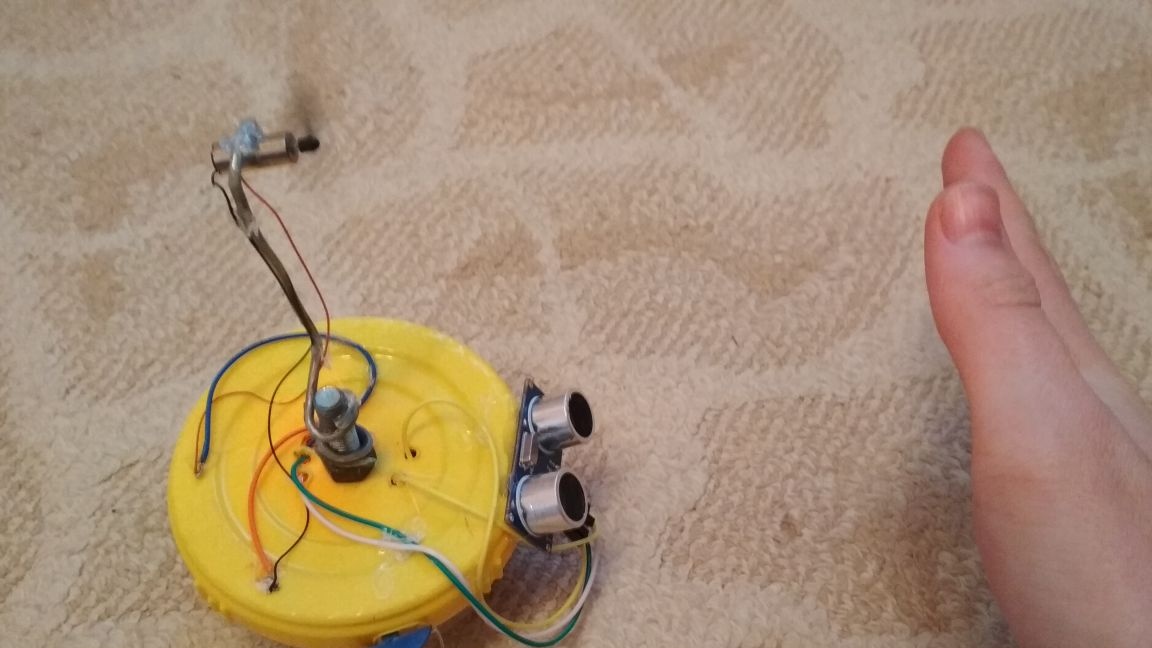
Si todo se hace correctamente, cuando el objeto se acerque más de 20 cm al sensor ultrasónico, la hélice debería comenzar a girar. Desconectamos nuestro diseño de la computadora y probamos nuestro dispositivo desde nuestra fuente de alimentación, para esto simplemente cambiamos el interruptor del estado apagado al estado encendido
Boceto (en este boceto, el motor se llama palabra led):
int echoPin = 9;
int trigPin = 8;
int led = 10;
configuración nula () {
Serial.begin (9600);
pinMode (trigPin, OUTPUT);
pinMode (echoPin, INPUT);
pinMode (led, SALIDA);
}
bucle vacío () {
int duración, cm;
digitalWrite (trigPin, LOW);
delayMicroseconds (2);
digitalWrite (trigPin, HIGH);
delayMicroseconds (10);
digitalWrite (trigPin, LOW);
duración = pulseIn (echoPin, HIGH);
cm = (duración / 58) +3;
Serial.print (cm);
Serial.println ("cm");
// retraso (1000);
si (cm & lt; 20) {
digitalWrite (led, ALTO);
} más {
digitalWrite (led, BAJO);
}
retraso (100);
}Bueno, eso es todo! ¡Nuestro ventilador automático o inteligente está listo! Puede que no lo creas, pero incluso una hélice tan pequeña sopla bastante bien a una distancia de 50 cm, pero idealmente necesitas usar una hélice más grande y un motor con un mayor número de revoluciones (utilicé baja tensión debido al bajo consumo de corriente). Espero que esto hecho en casa útil para alguien