

Hacer un robot así con tus propias manos no será nada difícil e incluso interesante. El resultado es un dispositivo muy interesante que se comportará como una criatura viviente. Todo esto gracias a dos pequeños motores, que son los que impulsan el robot. Al cambiar el ángulo de ataque de los ejes del motor, puede hacer que el robot sea más rápido o más lento. También puede experimentar con varias puntas que se pueden usar en el eje del motor.
Materiales y herramientas:
- dos motores pequeños (3 voltios, se pueden encontrar en juguetes para niños);
- soporte para baterías (puede hacerlo usted mismo o sacarlo del viejo control remoto, linterna, etc.);
- dos interruptores de tipo SPDT (se pueden obtener de un mouse de computadora antiguo);
- dos clips de papel pequeños y uno grande;
- una pequeña rueda del juguete;
- cableado delgado

Proceso de fabricación:
Primer paso Cableado de soldadura
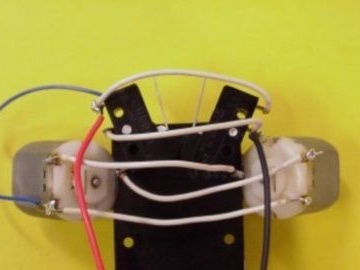
En primer lugar, debe preparar los cables y soldarlos a todos los componentes electrónicos, para que luego sea conveniente conectar los nodos. Los cables deben cortarse a una longitud de 6 cm y retirarse de sus extremos en aproximadamente 1 cm. Ahora necesita soldar dos cables a los motores y los interruptores. Además, no olvide soldar los dos cables a los contactos del soporte de la batería. Otros extremos de los cables están preferiblemente estañados.

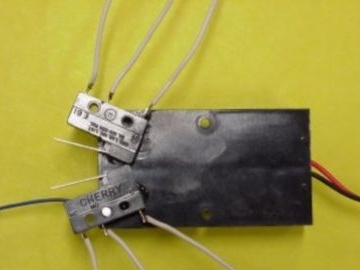
Paso dos Ajuste de interruptores
Para configurar los interruptores, el soporte de la batería debe estar al revés. Ahora debe pegar los interruptores con pegamento al soporte de la batería. Como resultado, se debe formar la letra V.
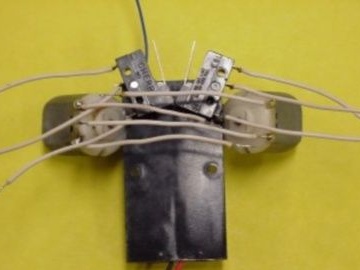
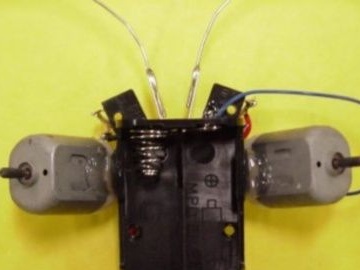
Paso tres Instalación del motor
Los motores deben estar unidos al soporte de la batería en ángulo, como se indica en la imagen. Los ángulos en ambos lados deben ser iguales, de lo contrario el robot No funcionará correctamente. Los ejes del motor deben descansar contra la carretera. Los motores se pueden montar con pegamento.

Paso cuatro Instalación de la rueda estabilizadora.
Se necesita el estabilizador para hecho en casa estaba parado en el camino. Para hacer una rueda, puede usar un rodillo de una grabadora o una rueda de un juguete para niños. En cuanto al "enchufe", está hecho de un clip de papel largo o una cuerda.En conclusión, el estabilizador se adhiere uniformemente al soporte de la batería.

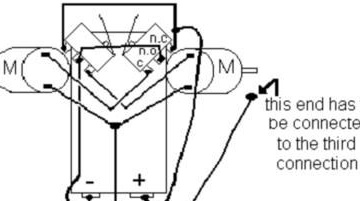
Paso cinco Conexión de cableado
Para que el robot funcione correctamente, todos los cables deben estar conectados claramente de acuerdo con el esquema. El circuito se puede ver en la imagen.

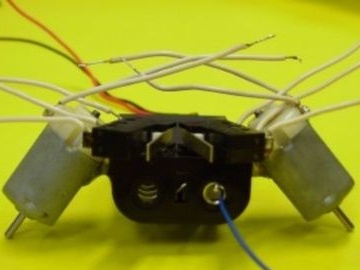
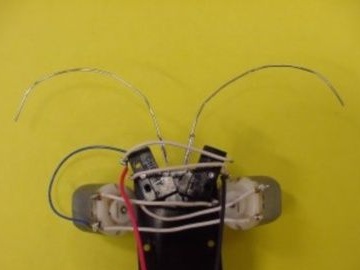
Paso seis Hacer un bigote para el insecto
El bigote servirá como rueda para el escarabajo, tan pronto como un obstáculo se encuentre en su camino, el bigote encenderá los interruptores y luego los motores girarán el robot en una dirección diferente. Cuando se activa el interruptor, uno de los motores se apaga y se activa una especie de diferencial. Si ambos interruptores están activados, el robot se detiene por completo. El bigote está hecho de pequeños clips de papel, deben pegarse cuidadosamente a los botones de los interruptores.

Séptimo paso. Revisión final y prueba del robot.
En la etapa final, se deben instalar puntas de goma en los ejes del motor, son necesarias para un mejor agarre. Se pueden hacer de batista.
Eso es todo, el robot está listo. Debe ejecutarlo sobre una superficie lisa, por ejemplo, sobre una mesa o linóleo. Dado que las patas del escarabajo son demasiado pequeñas, no se arrastrará a lo largo de la alfombra, para esto será necesario aumentar las puntas en los ejes del motor.
En el futuro, el robot puede actualizarse a su discreción. Por ejemplo, puede hacer ojos LED que se iluminarán cuando esté en contacto con un obstáculo.