
La peculiaridad de tal robot es que se ensambla a partir de una línea de medición y artículos domésticos. El robot se refiere al tipo de caminar. Según el autor, con todas las herramientas y materiales necesarios, ensamblar un robot de este tipo solo tomará un par de horas.
Materiales y herramientas para el montaje:
- servomotor configurado para rotación directa;
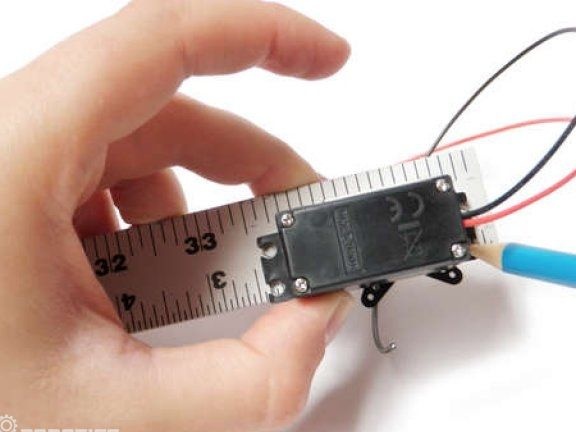
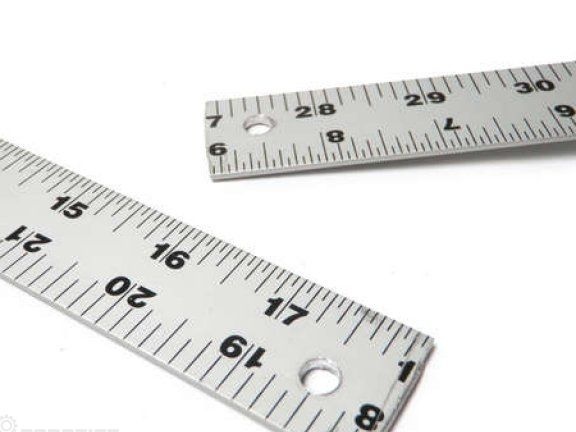
- reglas de aluminio de tamaño 2 - 18 ";
- dos pequeños recipientes de comida;
- dos rodillos con ruedas de 2 "- 3" de tamaño;
- un bolígrafo ordinario;
- una vieira;
- diez pequeños pernos con tuercas;
- cuatro arandelas pequeñas;
- un contrapeso de metal 2 "- 3";
- cuatro remaches;
- un interruptor tipo DPDT;
- Soporte de batería AA;
- cuatro pilas AA;
- dos cables de diferentes colores (negro y rojo);
- cinta aislante.

El proceso de fabricación del robot:
Primer paso Cortar la regla
Primero debes tomar una regla y cortarla con una sierra de banco. En total, se deben obtener dos segmentos de nueve pulgadas.



Paso dos Crear marcas
En una pieza de la regla, debe hacer dos incisiones de 3/4. Desde un borde, su profundidad debe ser de 1/2 ", y desde el otro 2-1 / 8". A continuación, la regla debe sujetarse en un tornillo de banco y usar el martillo para doblar la sección, esta será la base para montar el motor.



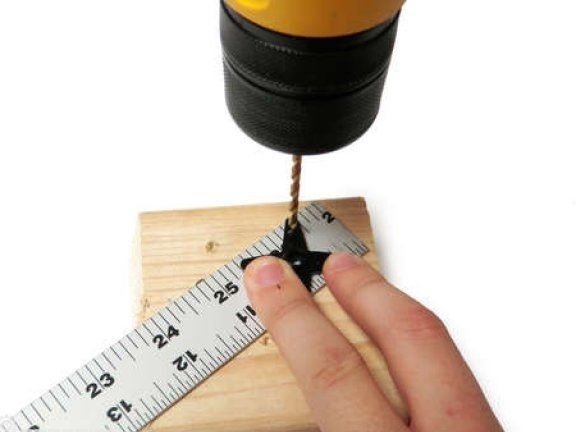
Paso tres Taladrar agujeros
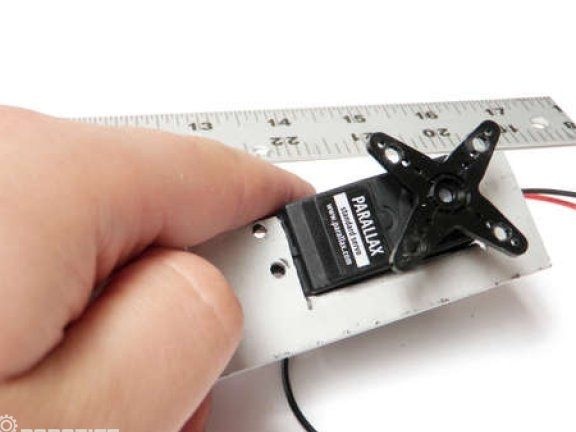
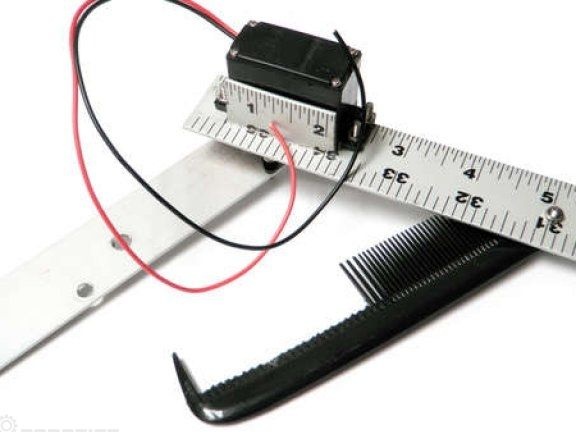
Ahora debe tomar el servomotor y conectarlo al lugar donde se montará. Luego, con un lápiz, debe hacer marcas donde posteriormente debe perforar agujeros con un diámetro de 1/8 ".



Ahora necesita perforar un agujero de 1/4 ", retrocediendo desde el extremo de la regla de 1/2". El orificio se perfora en el extremo opuesto desde donde se instalará el motor. El mismo orificio debe perforarse al final de otra pieza de la regla.


Ahora necesita perforar agujeros en las cuchillas del servo, para esto deben eliminarse. En total, debe perforar 4 agujeros como se indica en la foto con un diámetro de 1/8 ". Luego, las cuchillas deben estar unidas al borde de la regla, retrocediendo desde el extremo 1/2". Ahora se deben hacer cuatro agujeros similares en la regla.





Y finalmente, necesita perforar agujeros de 1/8 ", retrocediendo desde la ubicación de montaje del motor de 5". También necesita perforar 3/16 agujeros en el soporte del motor. También debe perforar otro orificio grande en el que quepan los servo tornillos. Eso es todo, todos los agujeros para ensamblar la estructura están listos.
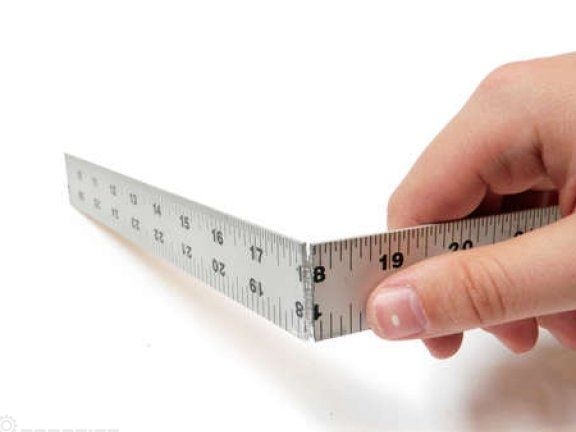
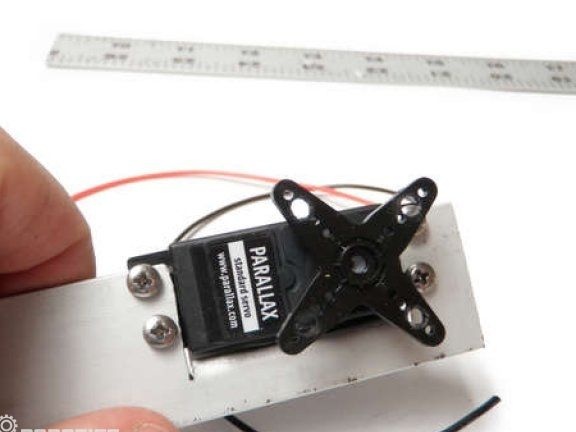
Paso cuatro Instalación del motor
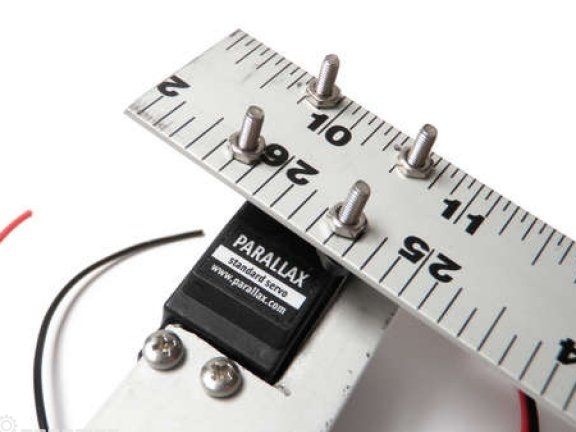
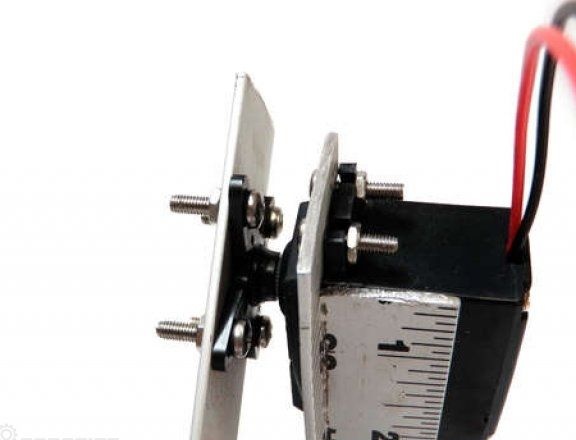
El motor debe montarse en una regla con tuercas y pernos.Para garantizar un perfil bajo, las cabezas de los tornillos deben ubicarse en el costado de las cuchillas del servo. Después de eso, la segunda mitad de la regla debe estar unida a las cuchillas del servomotor. En este caso, las cabezas de los tornillos deben girarse hacia adentro para que nada interfiera con el movimiento de las reglas.

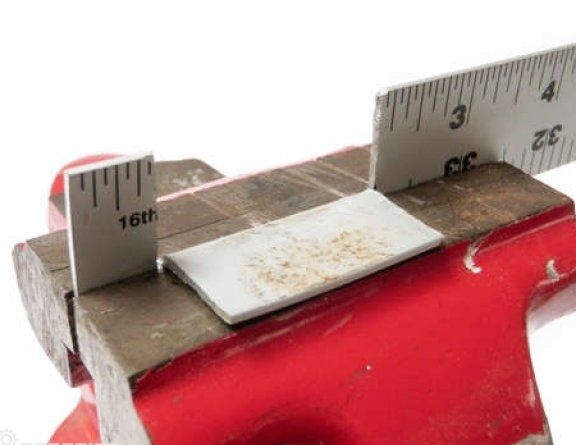
Paso cinco Preparación de vieiras
En un lado de la vieira, se deben extraer dos pulgadas de dientes. La forma más fácil de hacerlo es con un cortador lateral. En el borde de la vieira, debe dejar una cierta cantidad de dientes, gracias a ellos el peine se mantendrá en el camino. En el borde, debe perforar un orificio de 1/8 ". En la etapa final, el peine se lija cuidadosamente con papel de lija hasta obtener un estado suave.






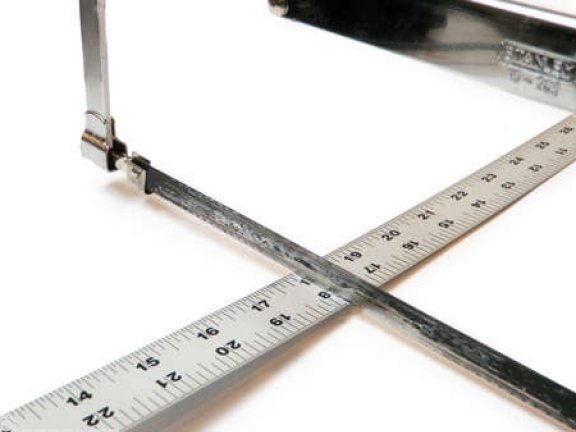
Paso seis Instalación de vieiras
Se debe insertar un tornillo en el orificio de la vieira, después de que se deben colocar dos arandelas en el tornillo, le permitirán llevar el peine de las reglas a una cierta distancia. En la etapa final, el perno se instala en una regla y luego la vieira se fija con una tuerca.

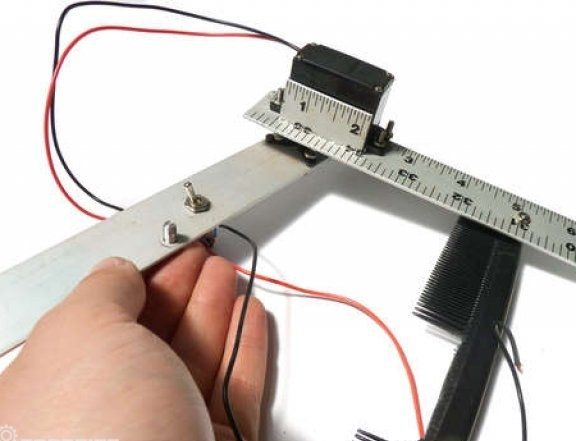
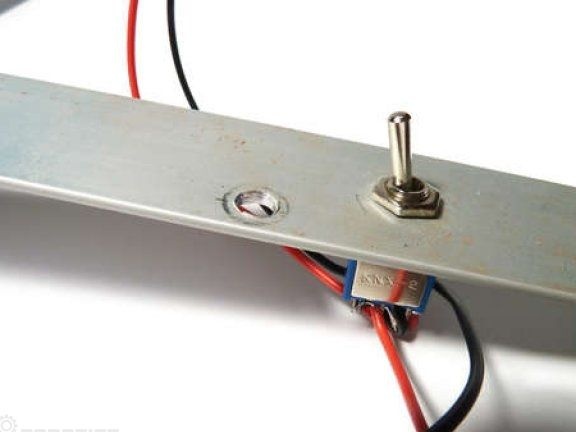
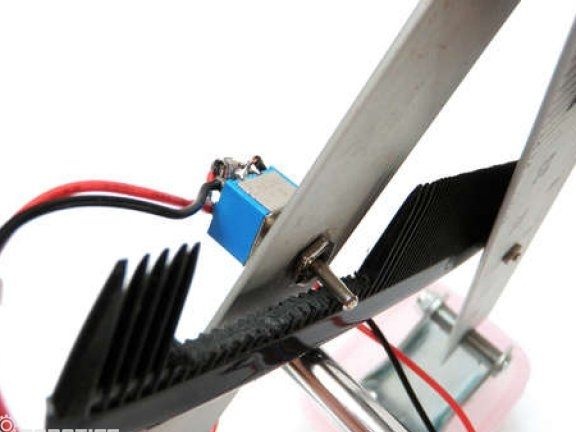
Séptimo paso. Montaje del interruptor
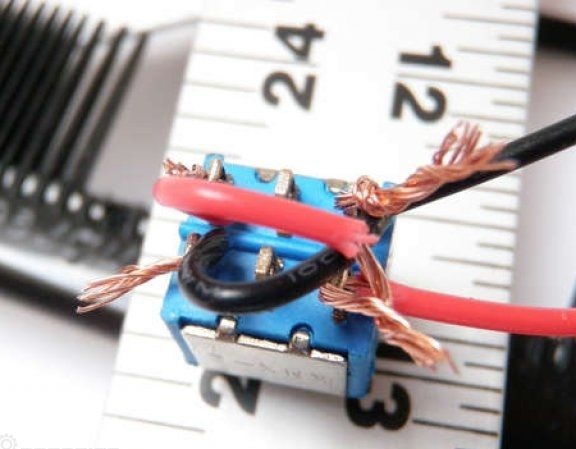
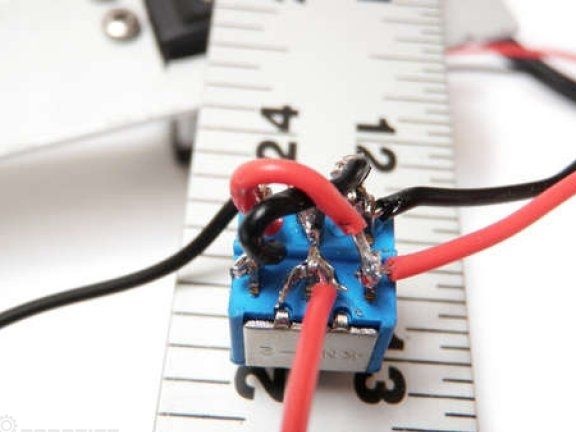
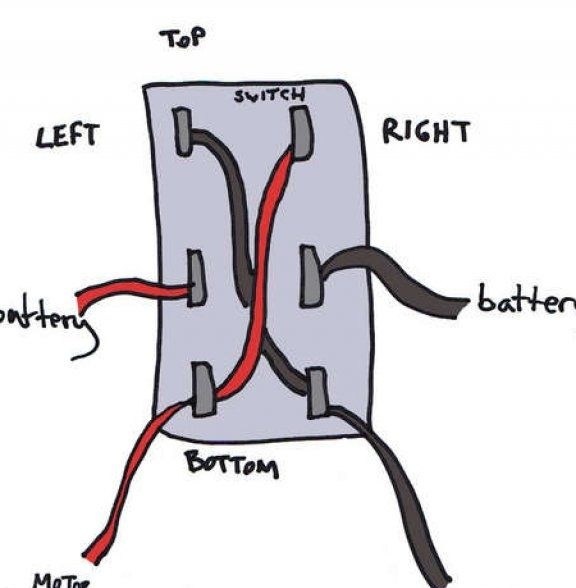
El interruptor debe insertarse en el orificio preparado y asegurarse con una tuerca. El interruptor debe insertarse en la posición indicada en las fotografías. Ahora debe tomar dos trozos de cable, rojo y negro, y soldarlos al interruptor como se muestra en la imagen. Luego, necesita soldar dos cables largos a los contactos laterales del interruptor.

Paso ocho Instalación de contrapeso.
El contrapeso está instalado en esa parte de la línea donde está instalado el servomotor. El peine está montado encima del contrapeso.
Paso nueve. Cortar el mango
Tome la ampolla del bolígrafo y luego córtela en dos piezas de una pulgada. A continuación, los tubos fabricados deben cortarse por la mitad, como resultado, saldrán cuatro tubos.


Paso diez Extracción de la rueda
Ahora debe tomar dos rodillos y desarmarlos quitando las ruedas. Las ruedas deben dejarse de lado; pueden usarse en otros. hecho en casa.



Paso once Crear puntos de pivote
La carcasa del rodillo debe colocarse en el centro de la tapa del recipiente de plástico. Ahora necesita perforar cuatro agujeros y asegurar el elemento con ataduras.

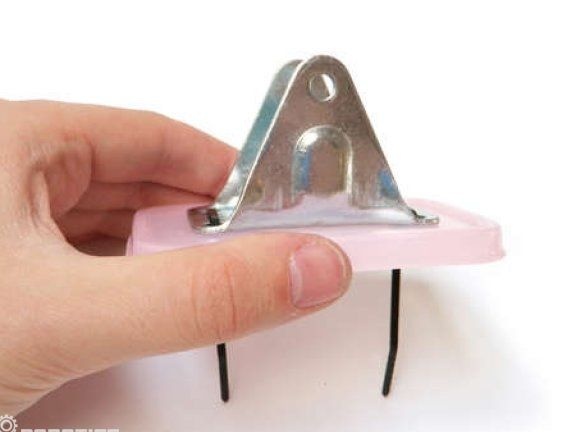

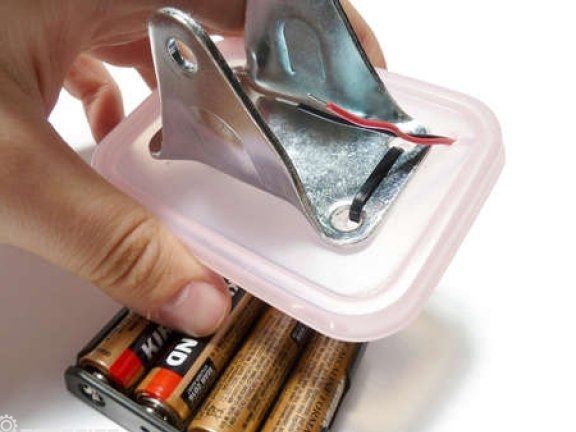


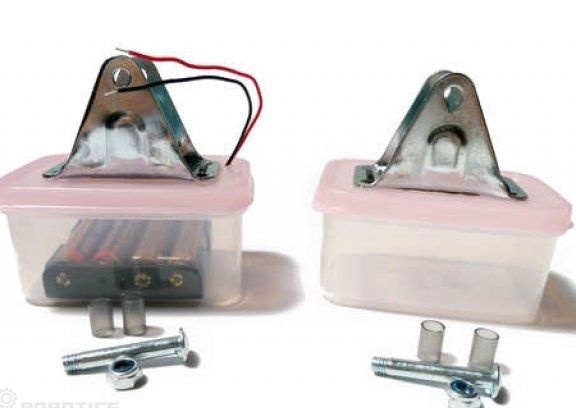

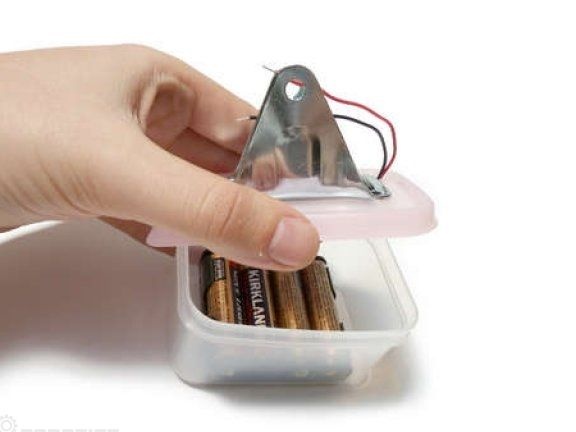

También en esta etapa, puede instalar una fuente de alimentación. Para hacer esto, en uno de los contenedores debe perforar un agujero e instalar las baterías en su interior. Posteriormente, a través del orificio perforado, debe hacer salir el cableado.
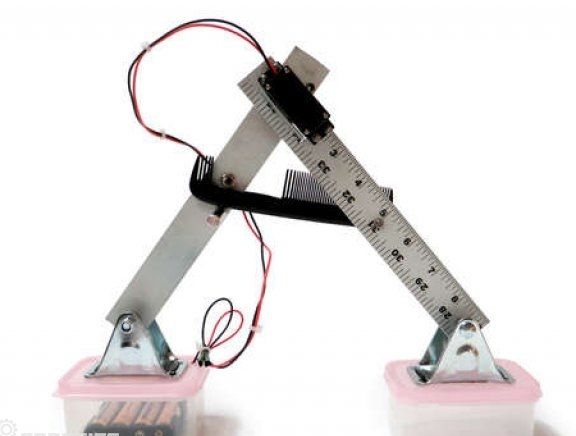
Paso doce. Ensamblaje de robot
Luego, los extremos de ambas reglas deben estar unidos a los soportes como se indica en las fotografías. Ahora solo queda conectar los cables de la alimentación y el interruptor, es fácil de hacer de acuerdo con los colores de los cables.
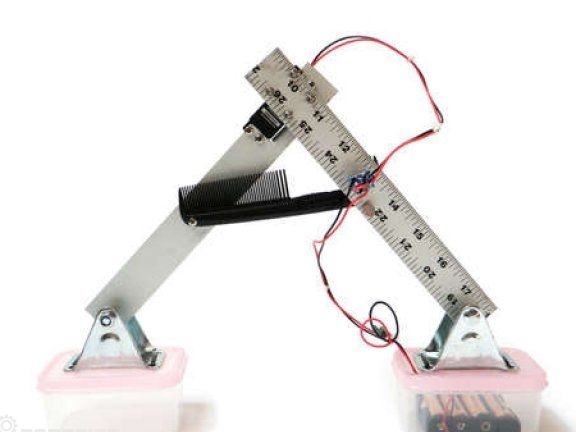
Eso es todo, el robot está listo. Cuando el motor está funcionando, el robot comienza a moverse, en algún momento, la vieira apaga la alimentación y las patas del robot vuelven a su estado original. Luego, el interruptor enciende el circuito nuevamente, y las patas del robot se comprimen nuevamente. Entonces él se irá.