

El robot El bricolaje será un gran juguete para niños, también con él podrás jugar con familiares o amigos. La esencia del robot es la siguiente. Es una caja con interruptor. Tan pronto como alguien hace clic en la caja con un interruptor, una puerta comienza a abrirse, de la cual sale una mano y vuelve a colocar el interruptor en su estado original. A pesar de la simplicidad externa del robot, de hecho, todo esto parece bastante divertido.
La base para crear un robot es un circuito Arduino. También hay algunos elementos mecánicos que se discutirán a continuación. Consideremos con más detalle cómo puede hazlo tu mismo ensamblar tal robot.
Materiales y herramientas para la fabricación:
- Placa Arduino, cualquiera con salidas PWM servirá;
- servomotores, dos piezas (adecuado el modelo Futaba - S3003, la potencia de dicho motor es suficiente para abrir la puerta, el dispositivo produce hasta 3,2 kg / cm de potencia);
- baterías;
- tipo de interruptor SPST o SPTT;
- un interruptor para controlar la energía de la batería;
- necesita un botón para reiniciar Arduino;
- cables, puentes y otras cositas.

Además, también necesitará una caja de cambios (adecuada para automóviles controlados por radio), una placa para un motor eléctrico llamado Arduino motor shield, un servomotor RC. Estos componentes son necesarios para que la caja se mueva, como el autor.
Para reducir el nivel de ruido durante el funcionamiento del dispositivo, se necesita un condensador de tipo electrolítico con un valor nominal de 10 mF, una resistencia de 10 K y un inversor 74HC04.
El proceso de fabricación del robot:
Primer paso ¿Cómo hacer una caja
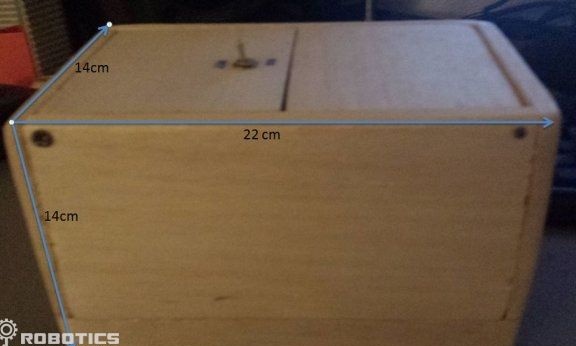
Para crear una caja, es decir, un cuerpo de robot, debe encontrar madera contrachapada o corcho. Además, necesita un pegamento potente para pegar madera. Es importante comprender que cuanto más pese la estructura, más energía se consumirá. En cuanto al tamaño de la caja, mide 22 cm x 14 cm x 14 cm.
Paso dos Diagrama esquemático e partes
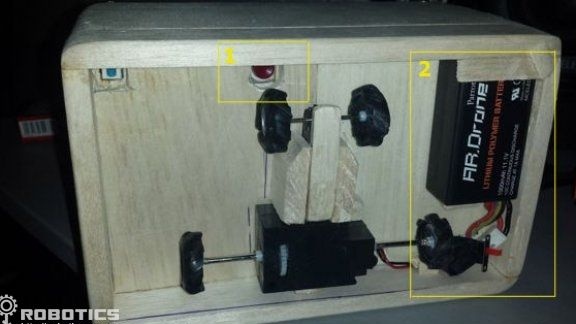
La parte superior del robot incluye una placa principal Arduino, dos servos y un interruptor. En cuanto al circuito, que es responsable de la cantidad de ruido, se puede reemplazar con una resistencia ordinaria.
Las servoaccionamientos se alimentan a través del quinto pin de la placa Arduino. En cuanto a los cables de señal, están conectados a los contactos 9 y 10. Gracias a estos contactos PWM, se controla el ángulo de rotación de los servomotores. Este es un ángulo de 0 a 180 grados.
El botón rojo es necesario para reiniciar el Arduino.
En la parte inferior del circuito se encuentra la placa de protección del motor Arduino.En el tablero puede ver dos canales, A y B, gracias a ellos, si lo desea, puede conectar dos motores a la vez. La tarea principal de esta placa es que con ella puede establecer mediante programación la velocidad de rotación, dirección, interrupciones para cualquier canal de los motores. Si observa el diagrama, se usa el canal B, mientras que el contacto 13 determina la dirección, el contacto 11 es la velocidad y el contacto 8 se usa para controlar los frenos.
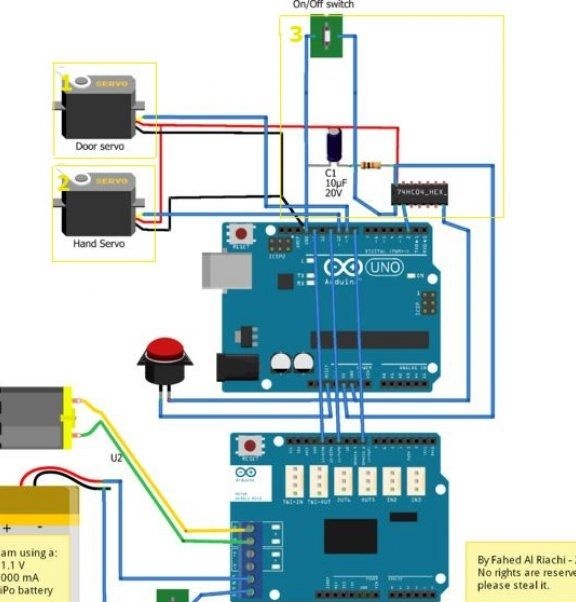
La fuente de alimentación es una batería de 11.1 / 1000 mA, se conecta a la placa de protección del motor Arduino. Si no se va a utilizar, la batería está conectada directamente a la placa principal.
Paso tres Instalación del motor
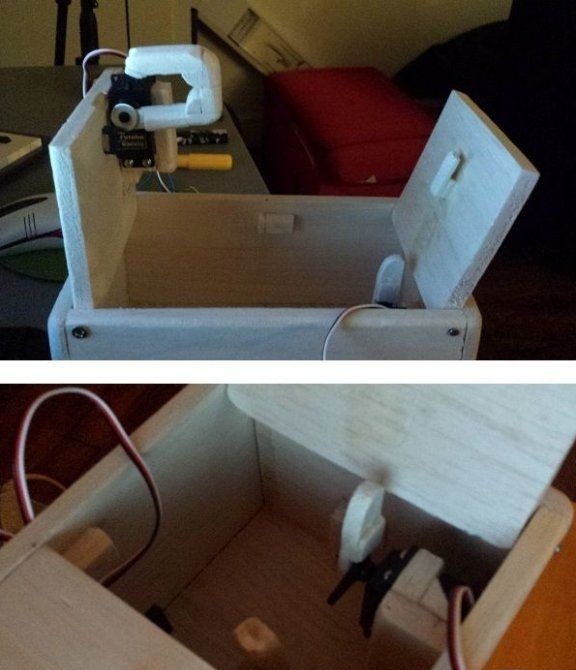
El servoaccionamiento y las manecillas se instalan experimentalmente, debe verificar en la práctica si la mecánica funciona correctamente. Para verificar el radio de desviación de los motores, puede usar el programa Arduino IDE.
Para la fabricación de manos tomadas de madera de cualquier tipo. Lo principal es que es ligero, ya que de lo contrario el consumo de energía aumentará. En cuanto al tamaño de la mano, se ajusta durante la instalación, eligiendo la longitud deseada, se logra el efecto deseado.
El empujador de la tapa y la mano están montados para que no toquen el servomotor durante la operación.
Paso cuatro Conectamos el servomotor y cambiamos a Arduino
Usando cables y puentes, debe conectar todos los elementos electrónicos entre sí de acuerdo con el esquema especificado. Los cables deben colocarse de modo que no interfieran con los elementos móviles del robot.
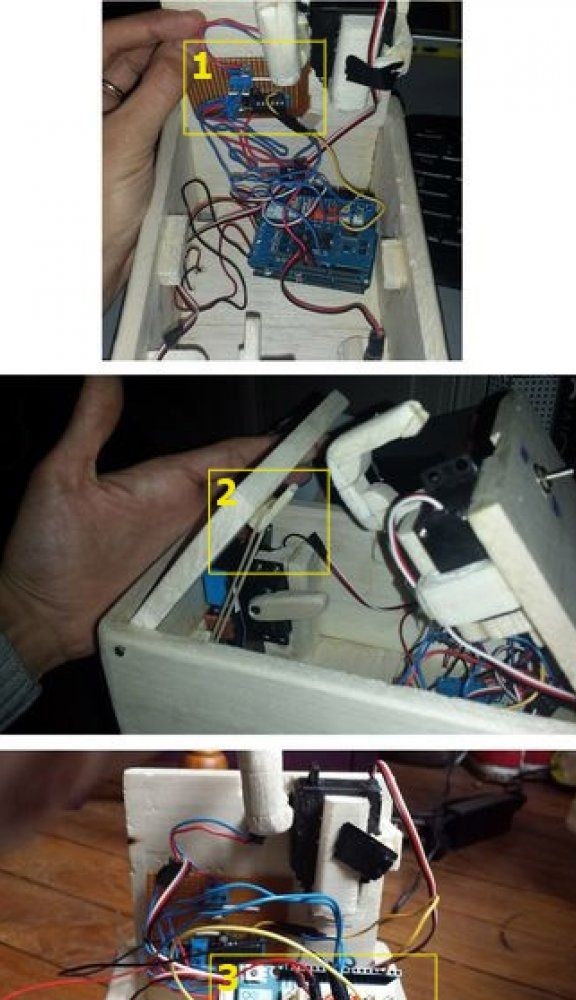
Debajo del número 1, puede ver cómo está conectado y dónde está ubicado el circuito de conmutación. El número 2 marca un elemento como una banda elástica, es necesario para que la puerta se abra con cierta tensión. Bueno, el número 3 indica el escudo del motor instalado en el Arduino.
Paso cinco Instalación de la parte mecánica para mover la caja.
En la parte inferior de la caja hay una batería, un motor con ruedas, una caja de cambios, un botón de reinicio y un interruptor de palanca para controlar la potencia del robot. Antes de adjuntar los elementos, debe calcular el saldo del peso de la caja. Para que el robot sea estable, además del eje delantero, se instala otro adicional.
Paso seis Otra característica adicional.
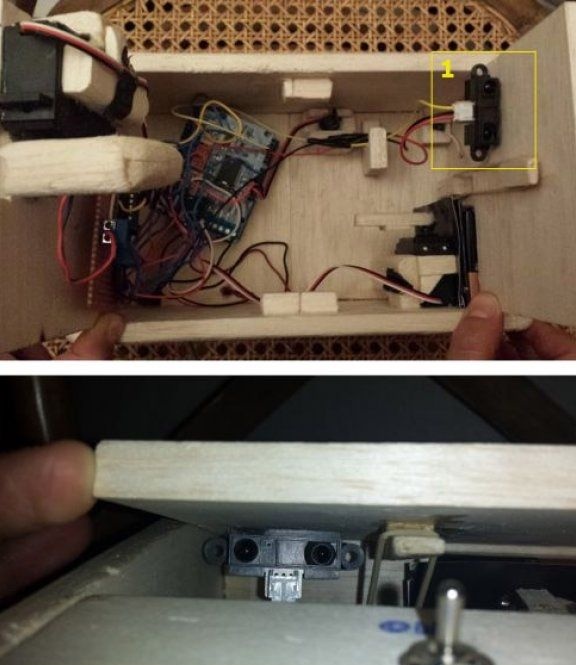
Para que el robot determine la dirección del movimiento, puede estar equipado con un sensor IR. Al mismo tiempo, cuando alguien intenta tocar el interruptor de palanca, el cuadro se moverá hacia la derecha y hacia la izquierda. Para estos fines, el sensor GP2Y0A21 es adecuado, tiene tres cables. El amarillo debe estar conectado al tercer pin de Arduino, el rojo al pin 5 y el negro a tierra.
Eso es todo, un robot simple y al mismo tiempo divertido está listo. Tal juguete traerá alegría no solo al niño, sino que también sorprenderá a muchos adultos.
Firmware: