
Este el robot controlado por teléfono inteligente bluetooth. El acelerómetro del teléfono inteligente mide el ángulo del teléfono hacia la izquierda / derecha, arriba / abajo, utiliza estos datos para calcular la velocidad de los motores direccionales, los datos se transmiten a través de Bluetooth a Arduino
Lo que necesitas para construir un robot.
Arduino uno, módulo Bluetooth HC-06, dos motores de engranajes de 300 RPM y 12v, controlador de motor de puente H dual L298N de puente H
Batería de plomo ácido de 12 a 1.3 A. Cada motor consume 0.4A, más el consumo de la lógica del controlador. Cables Arduino, baterías normales de 9v y un conector para conectar la batería al Arduino. Cables eléctricos para conectar motores eléctricos. Cable usb. Teléfono con Android versión 4 y superior. 4 ruedas giratorias de goma de 50 mm de Screwfix o Toolstation; dos cubos universales Lynxmotion HUB-02.










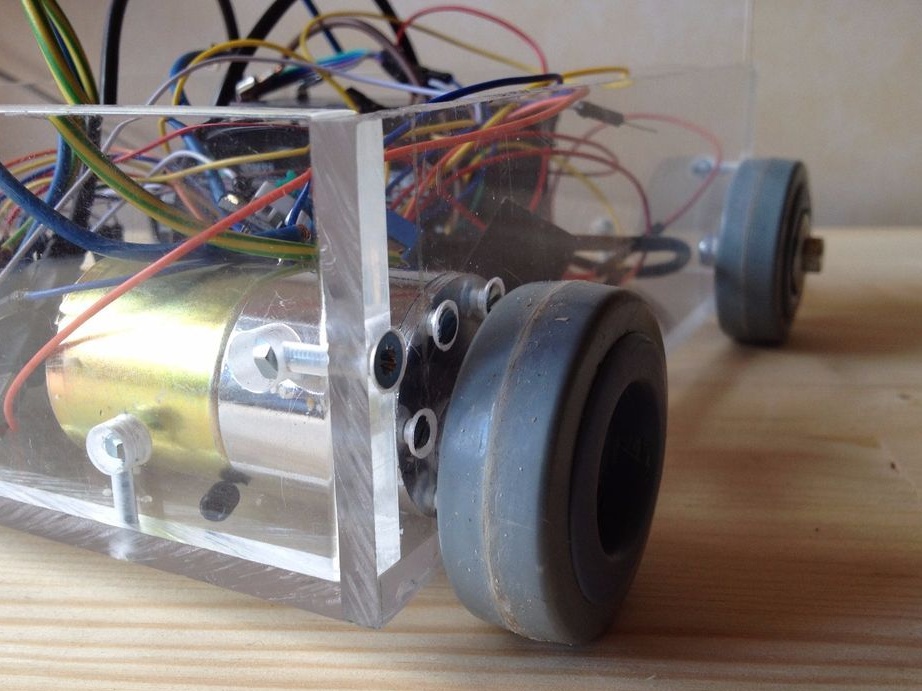
La caja está ensamblada en plástico de 22 cm de largo y 17 cm de ancho. Deben conectarse dos motores al eje y asegurarse con un pasador roscado.
Ruedas delanteras
Se retira el caucho de los rodillos y se perforan dos agujeros en ellos de acuerdo con los agujeros en los cubos. Los cubos se fijan en los ejes que pasan a través de la carcasa con pasadores roscados. Después de eso, los rodillos se fijan en los cubos y se les pone goma.
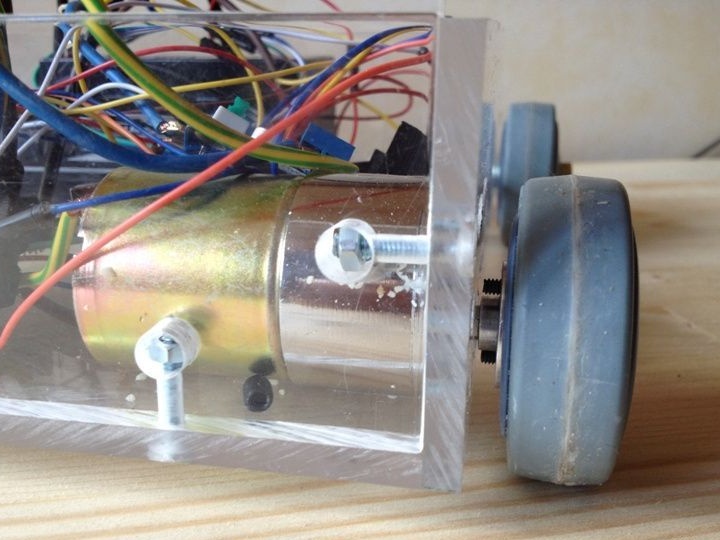
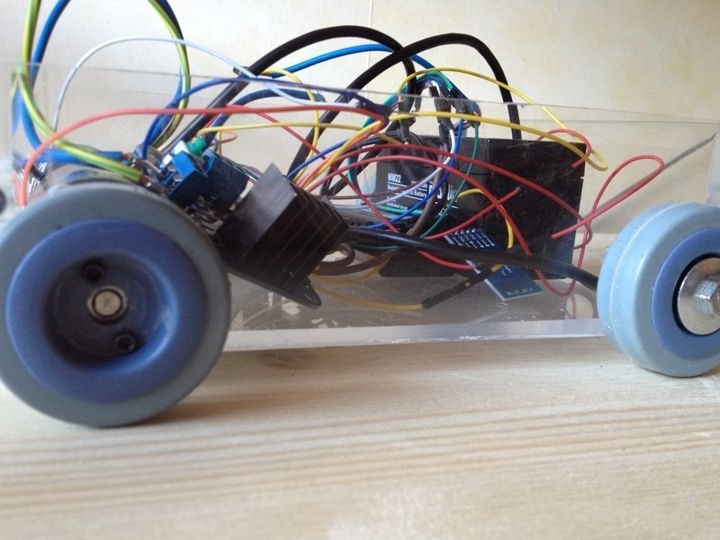
Ruedas traseras
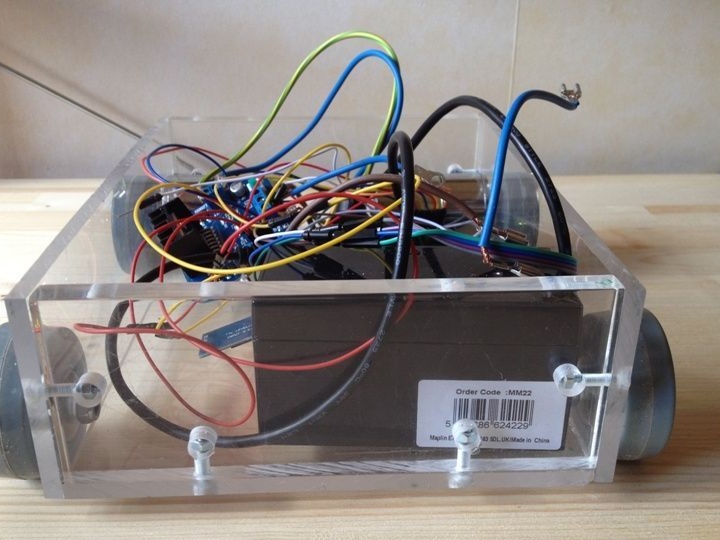
Las ruedas traseras simplemente se desenroscan de la bisagra y se aseguran a través de agujeros perforados en la carcasa.
Conexiones electricas.
Habrá problemas al cargar el código del programa en Arduino. Esto se debe al hecho de que el módulo Bluetooth, sus contactos RX \ TX, están conectados a los pines Arduino 1 y 2, que también se utilizan para transferir datos a través de USB. Es necesario cambiar los contactos 1 y 2 a 11 y 12 en la biblioteca conectada, que se utilizará para la transferencia de datos.
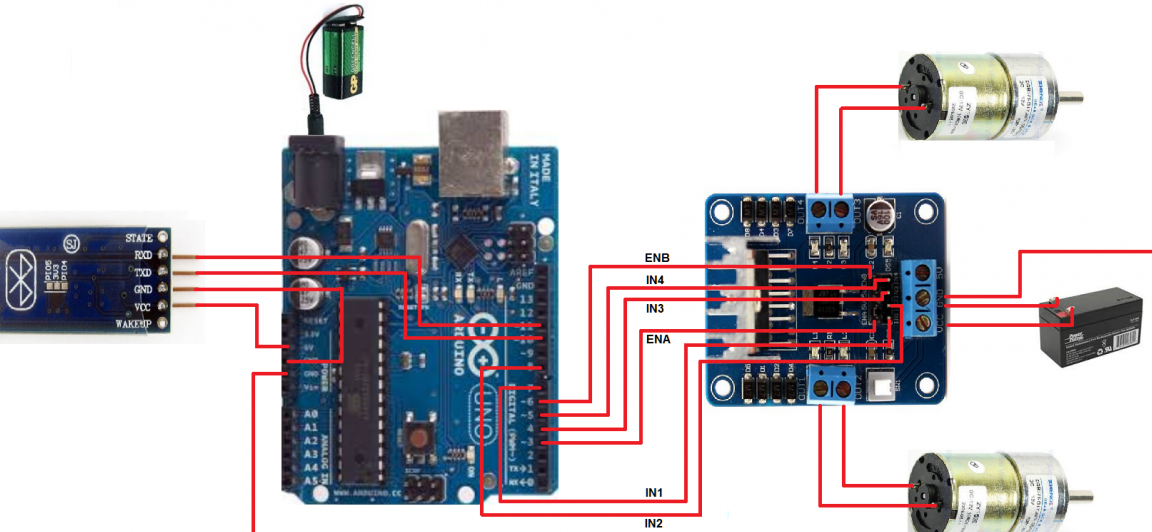
El controlador del motor no necesita una fuente de alimentación separada para la lógica. 12V es suficiente para alimentar la lógica del controlador y el motor en sí. El menos de la batería debe estar conectado tanto con el Arduino como con el controlador del motor. Los contactos del controlador del motor ECA / 5V y ENB / 5V pueden puentearse. Debe eliminarse antes de conectarse al Arduino. Nada debe estar conectado a los dos pines de 5V.
Código de Android
El archivo adjunto debe descomprimirse e importarse a Android Studio, empacarlo en apk e instalarlo en el teléfono.
Archivos clave:
Actividad de dispositivos emparejados:
deviceList.java
activity_device_list.xml
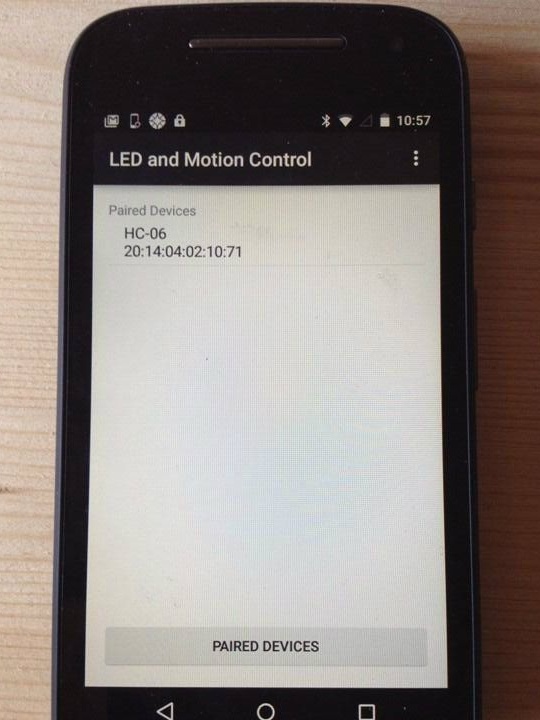
LED y actividad de control de movimiento:
ledControl.java
activity_led_control.xml
Manifiesto
AndroidManifest.xml
La Actividad de dispositivos emparejados muestra los dispositivos Bluetooth disponibles. Tan pronto como se conectan los dispositivos, el control se transfiere al LED y a la Actividad de control de movimiento.
Los botones de encendido / apagado envían un mensaje de "encendido" o "apagado" al Arduino, encendiendo o apagando el LED incorporado. El acelerómetro del teléfono controla el movimiento, que transmite valores x / y desde el sensor, cada vez que estos valores cambian. En base a esto, Arduino calcula la velocidad y la dirección de rotación de los motores en el rango de 0 a 255. Transmite estos valores de Arduino en forma de 'L-255:' o 'R100', etc. En base a esto, el Arduino envía los comandos de velocidad de rotación del motor izquierdo a ENA, el derecho a ENB y cambia la dirección de rotación cambiando la polaridad a IN1, IN2 para la izquierda, N3 y N4 para el motor derecho.