

El decodificador convertirá el tono en un código binario equivalente a esa señal. Además, esta señal binaria irá al controlador, pero el controlador mismo controlará los controladores de los motores, lo que moverá la máquina en una dirección determinada.
Según el autor, la principal ventaja de esto hecho en casa es que gracias a este enfoque es posible superar el límite del rango. Este problema se puede encontrar cuando se trabaja en frecuencias de radio.
Herramientas y materiales para montaje:
- soldador con soldadura y fundente;
- taladro eléctrico (también manual adecuado);
- cuchillo
- destornillador
- multímetro;
- placa de circuito impreso;
- diodo rectificador 1N4007;
- regulador de voltaje 7805v;
- controlador de motor L293D;
- Decodificador MT8870 DTMF;
- chip 74LS04 NO puerta;
- Microcontrolador AVR ATmega16;
- auriculares viejos;
- resonador de cuarzo XTAL1 - 3.57MHz;
- interruptor de presión;
- resonador de cuarzo XTAL2 - 12 MHz;
- conectores pin "macho", "madre";
- dos motores de corriente continua de 6V, 50 rpm con soportes;
- cuatro ruedas;
- tipo de batería 6V, 4.5 A / h;
- cinco LED de cualquier color (3 mm);
- una pajita o caja de un mango de plástico;
- tuercas con pernos de 2 pulgadas (4 piezas).


Resistencias: 100 kOhm (2 piezas), 330 kOhm (1 pieza), 10 kOhm (5 piezas), 100 ohm (4 piezas).
Condensadores: cerámica 0.1μF (1 pieza), cerámica 22p (4 piezas), electrolítico 10uF, 100uF (2 piezas).

Proceso de montaje de la máquina:
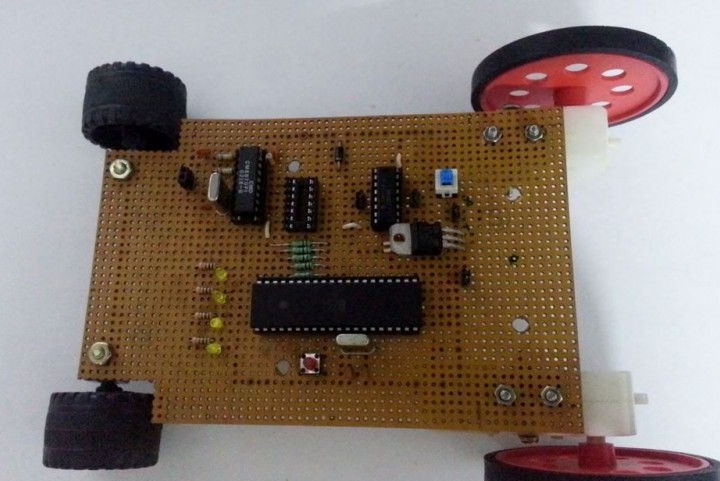
Paso 1. Suelde el circuito
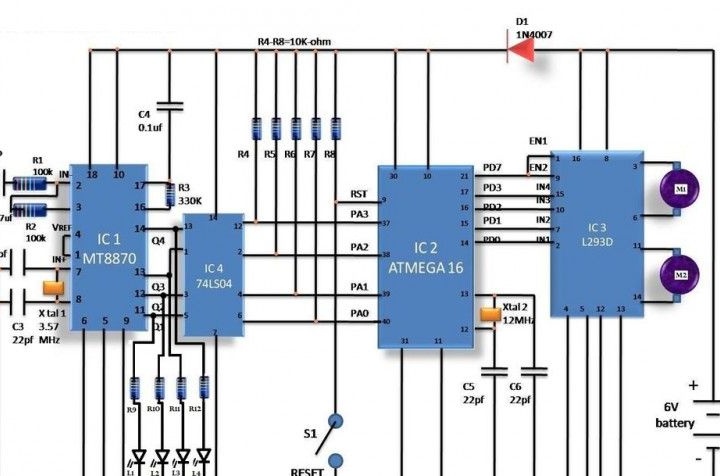
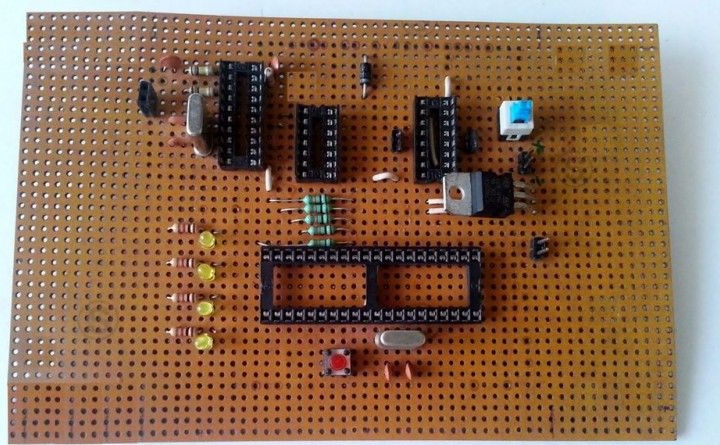
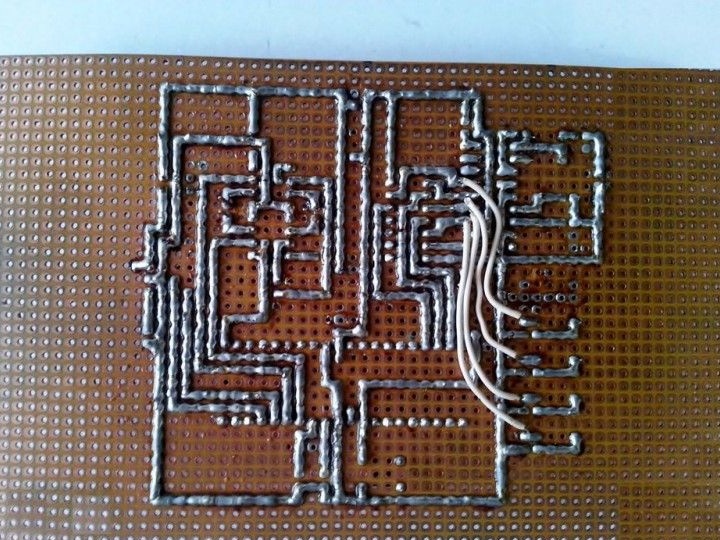
El ensamblaje comienza con la soldadura del microcontrolador ATmega16, así como otros componentes, como se indica en el diagrama. Es necesario soldar con cuidado y cuidado, sin apartarse del circuito.
El autor del circuito hizo una fuente de alimentación regulada adicional de 5V, se utiliza el regulador de voltaje 7805. Si la clasificación de la batería está por debajo del rango de operación del controlador, entonces no es necesario utilizar el controlador. Es necesario solo si el voltaje de funcionamiento de la batería es superior a 6V.
Alternativamente, puede usar una placa de pruebas en lugar de soldar.
Paso 2. Haciendo el cable de conexión
Para hacer un cable de conexión, necesita auriculares viejos, debe cortar el conector de audio de ellos con un margen de cable de aproximadamente 30 cm. Después de esto, el cableado debe limpiarse correctamente. Como resultado, debe obtener dos pares de cables, la mayoría de las veces es rojo dorado y azul dorado, pero los colores pueden ser diferentes según el fabricante.
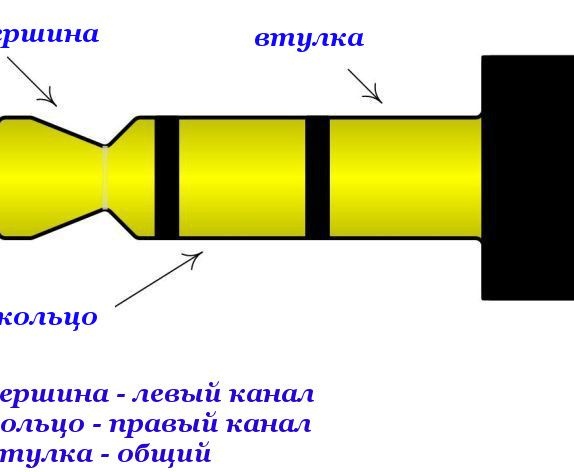
El cableado dorado puede retorcerse y aislarse, o incluso cortarse. Solo se necesitan dos cables para el circuito, estos son rojo y azul. Un cable está conectado a la parte superior del enchufe y draga al anillo. Después de pelar el cableado, debe soldar al conector macho de dos pines. Para aislar bien el cableado, puede usar un tubo termocontraíble.


Después de hacer el cable, debe tomar un multímetro y decidir qué contacto está conectado a qué. Directamente, el cable en sí se conectará a la placa mediante un conector pin, pero a un teléfono inteligente con un conector de audio.
Paso 3. Software casero
El código del microcontrolador se creó en C, se compiló en AVR Studio. El código en sí es muy simple y usa solo las funciones básicas del controlador. El firmware adjunto al artículo debe escribirse en el controlador utilizando el editor AVR.
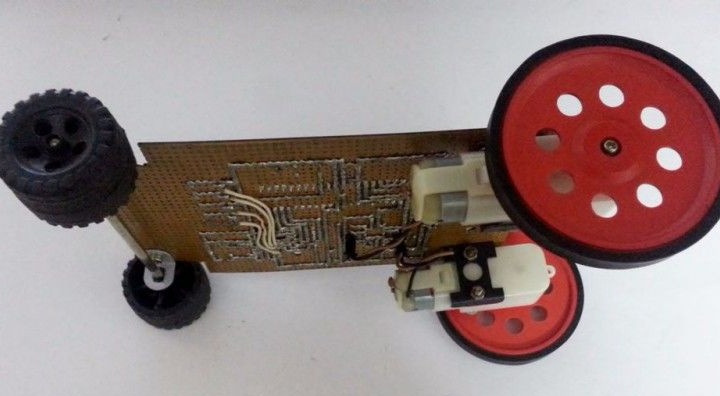
Paso 4. Instalar partes periféricas
Para instalar los motores en las esquinas de la parte posterior de la placa, debe perforar agujeros. En el lado frontal habrá un eje, puede ser un radio de metal o un lápiz delgado, luego se colocan ruedas. En la misma etapa, usando un cable hecho previamente, puede conectar un teléfono inteligente a la máquina de escribir. Cuando está conectado, el teléfono inteligente debe cambiarse al modo de respuesta automática.
Después de eso, puede conectar la batería y encenderla de forma casera. Si todo se hace correctamente, cuatro LED deberían encenderse.
Paso 5. Aprender a conducir un auto
Para comenzar a controlar la máquina en un teléfono inteligente, debe hacer una llamada. Como ya se mencionó, la tecnología IVRS se usa aquí, es decir, cuando se presiona un botón determinado, se envía una señal de tono determinada al teléfono inteligente.
Botón 8 significa movimiento hacia atrás
El botón 4 significa moverse a la izquierda
El botón 5 es una parada
El botón 6 es un giro a la derecha
Botón 2 - Adelante
Paso 6. Fase final de montaje
Para hacer que el trabajo casero sea más hermoso, la máquina puede hacer un techo. También se instalará un teléfono inteligente en él. Está hecho de una pieza de una placa de circuito impreso, en las esquinas de las cuales necesita perforar agujeros. El techo está sujeto con cuatro pernos, cuatro conductos de la altura requerida se cortan debajo de ellos.
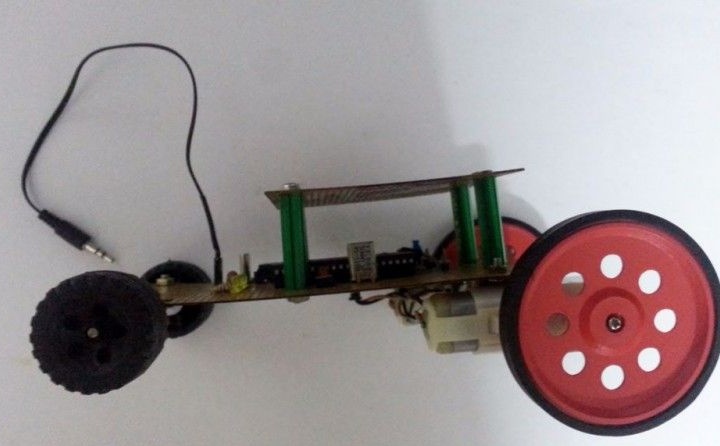
Eso es todo, ahora el producto casero está listo. Puedes comenzar la prueba.
[media = https: //youtu.be/loSME1w22UQ]