


A menudo hago robots o juguetes basados en Arduino o tableros similares. Como una opción para controlar tales dispositivos, uso el rango infrarrojo. En términos del receptor no hay problemas, es fácil de encontrar y conectar, pero en el caso del control remoto es más difícil.
Y aquí hay dos opciones:
1. use el control remoto del televisor u otro equipo que tenga a mano. Entonces hay mucho alboroto, problemas y lleva mucho tiempo. Primero, debe leer los códigos de los botones del control remoto y luego escribirlos en su firmware. Otro problema es que el control remoto envía una señal cuando se presionan los botones una vez, no lo repite (si el dispositivo se mueve o está muy lejos, el receptor puede no leerlo a la vez) y no envía nada cuando se suelta el botón, lo cual es muy inconveniente cuando Es necesario controlar la maquinaria en movimiento. Bueno, no quiero controlar el televisor y la máquina al mismo tiempo.
2. Haga su propio control remoto.
Esta es la segunda forma en que iré. Para lo básico, usé el viejo joystick de la consola Sega. Hay todo lo que necesitas allí. Cuatro flechas (convenientes para controlar automóviles) y 8 botones.
Entonces, lo que necesitamos:
- joystick de Sega
- Arduino Pro Mini 3.3v 8MHz
- USB-TTL
- 2 baterías Ni-Mn 1.2v 1000mA
- LED IR
- LED rojo
- LED azul
- resistencia 2x75Om, 2x5Om, 1x2Om
alambre
- Conector PLSx5 "madre"
- pegamento caliente
- cables
- compartimento de la batería 4xAAA
- cables multicolores
- soldador, soldadura, colofonia
- brazos rectos
Paso 1 Soldadura
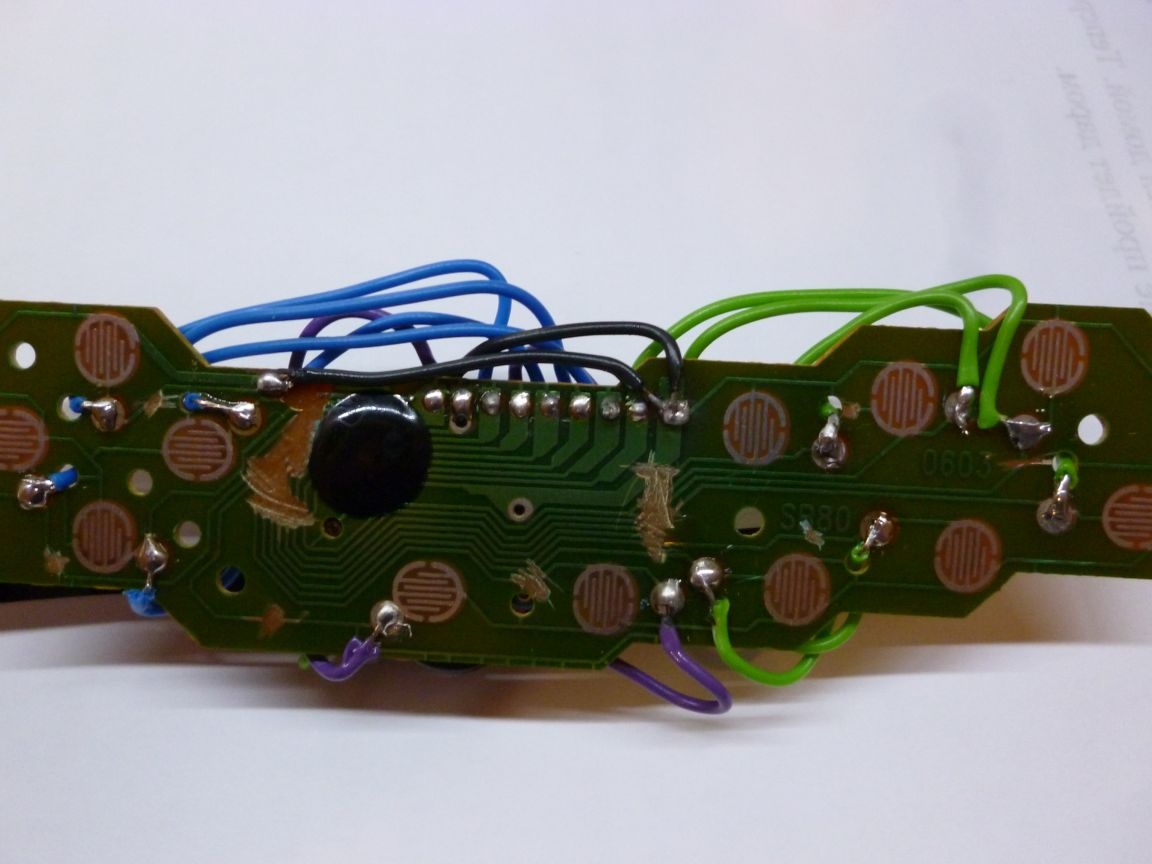
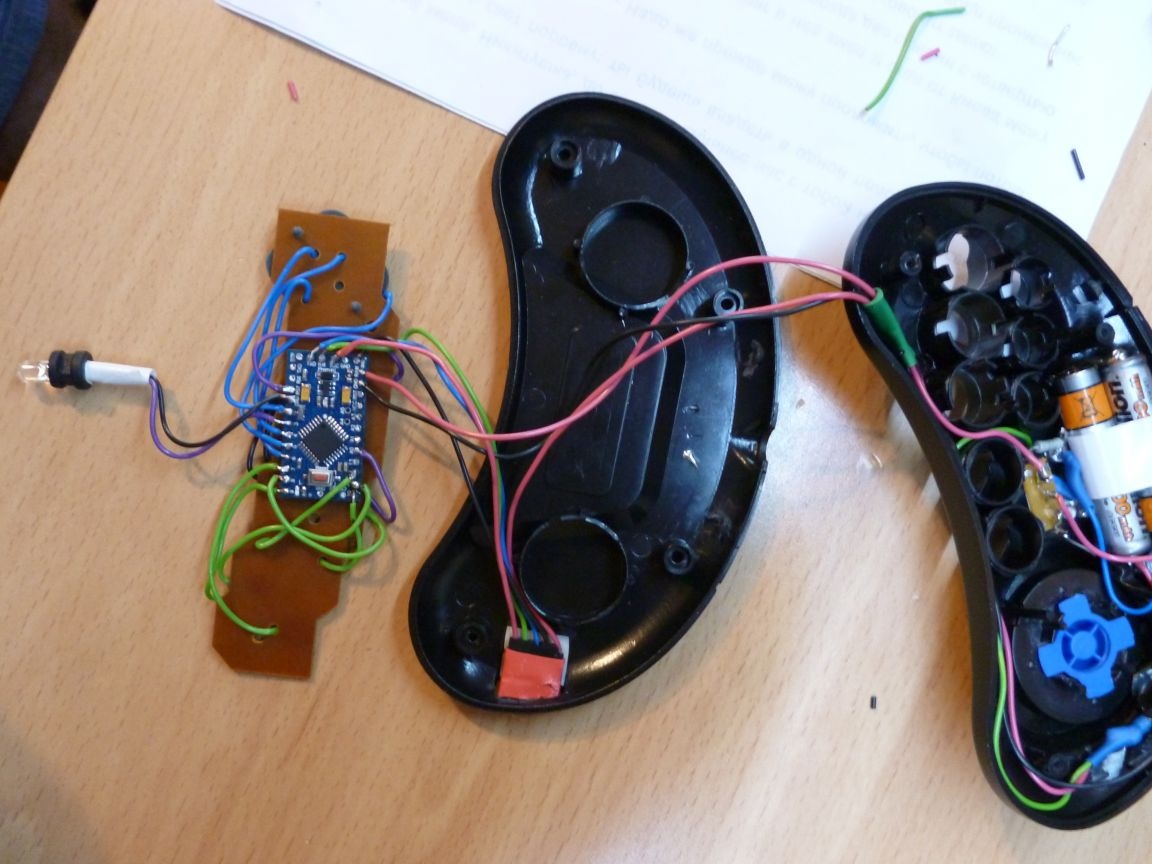
Desmontamos nuestro joystick, retiramos la placa y soldamos todos los cables. A continuación, debe tomar un cuchillo de oficina o simplemente un cuchillo afilado y cortar todas las pistas del controlador en el tablero para que no interfiera con nosotros y no entre en conflicto con Arduino. Cerca de cada botón hay un pequeño círculo con una pista desnuda. Después de tomar un soldador, es necesario soldar a cada taza a lo largo del cable, así como encontrar un cable común para soldar y un cable (común, negro). Envolver los cables de nuevo debería verse así:
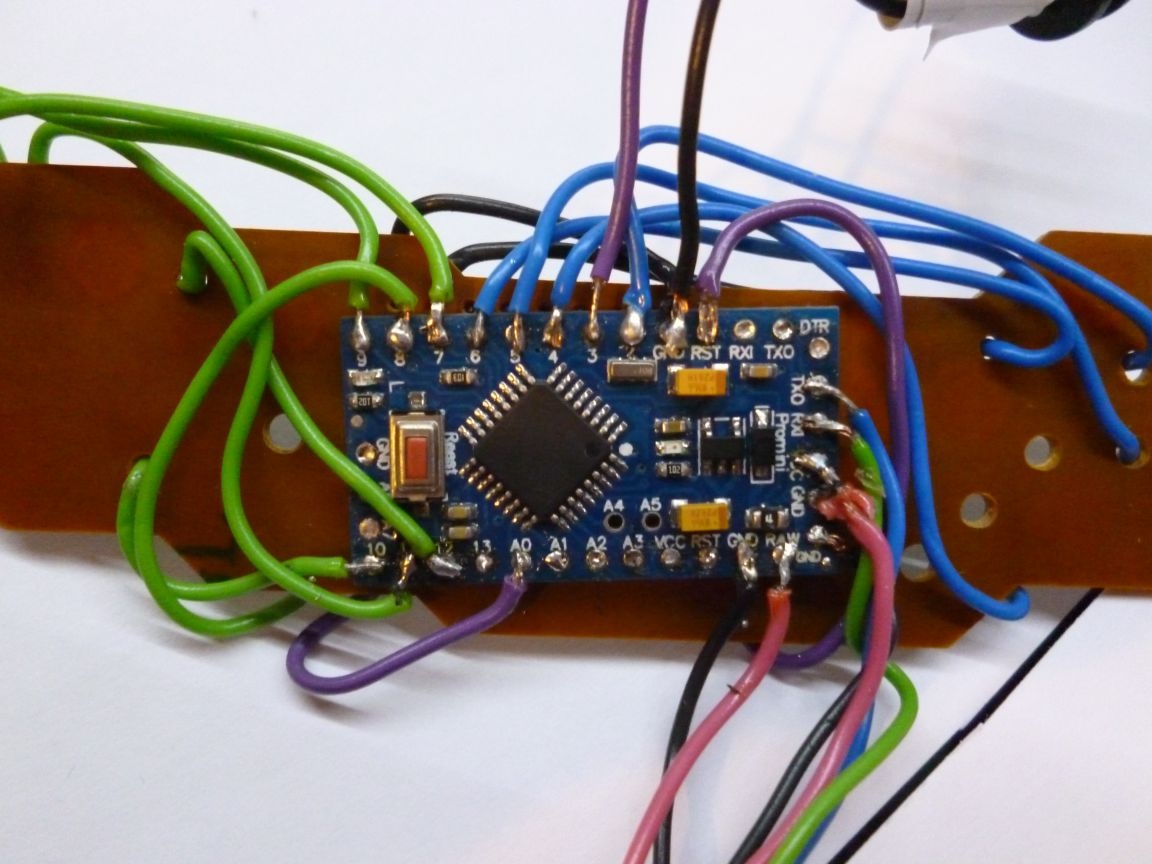
En el reverso, en una cinta de doble cara, pegamos nuestro Arduino. Una pequeña digresión sobre la elección de Arduino. En principio, puede usar cualquier tablero, lo principal es que cabe dentro del joystick.
Suelde nuestros motivos de acuerdo con el siguiente esquema
Joystick Arduino
Flecha arriba 2
Flecha hacia abajo 4
Flecha izquierda 5
Flecha derecha 6
Botón A 8
Botón B 10
Botón C 7
Botón X 12
Botón Y 11
Botón Z 9
Botón de inicio 14 (A0)
Botón de reinicio RST
IR LED + 3
GND genérico
LED azul
a través de una resistencia en bruto de 75 ohmios
LED rojo
a través de la resistencia 75 conectores Om + 5
Déjame explicarte: soldeé todos los botones como era convenientemente por cable, si se mezclan, solo necesitas arreglarlo en la costura. ¡El contacto positivo principal IR debe soldarse a 3! Recuerde soldar menos IR a GND. El botón Restablecer es necesario para reiniciar el Arduino con firmware.
Paso 2 modo caso
Es necesario pensar en una conclusión de cables para la conexión de USB-TTL. Usé el conector en 5 PLS "madre". Hizo una ranura de tamaño adecuado en el lado derecho del joystick, insertó el conector y llenó todo con pegamento caliente. + 5v desde este conector por ahora, solo da salida al cable. TX a RX Arduino, RX a TX respectivamente. + 3.3v a 3.3 Arduino, GND a GND Arduino. Hizo una ranura de tamaño adecuado en el lado derecho del joystick.

Para indicar la inclusión del control remoto y la carga de la batería, es necesario perforar dos orificios con un diámetro de 5 mm delante del joystick e insertar los LED allí. Y también corta un agujero para el interruptor.

En el interior, llene los diodos e interruptores con pegamento caliente.
Paso 3 nutrición
Entonces hay dos opciones para la nutrición. Hice ambas cosas, pero puedes elegir la apropiada y usar una.
El primer alimentado por batería. Para hacer esto, suelde dos baterías NI-MN en serie, a los profesionales a través del interruptor, suelde el siguiente diodo 5Om + 5Om + 2Om + y +5 de nuestro conector secuencialmente, esto es para cargar desde USB-TTL. Envolvemos el pico resultante del diodo y las resistencias con cinta aislante y colocamos la esquina superior derecha. Paralelamente, suelde nuestro LED rojo a través de una resistencia de 75 Om para indicar una carga. La segunda posición del interruptor es el cable de trabajo que va al Arduino RAW y nuevamente en paralelo, esta vez un LED azul, a través de una resistencia de 75Om. Menos directamente al GND Arduino.
Las baterías están ubicadas en la parte superior del joystick y deben estar pegadas

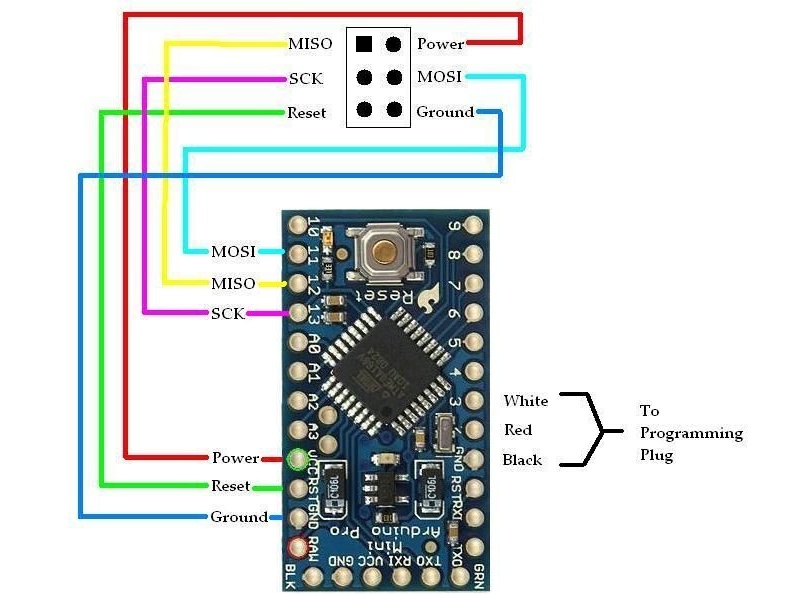
Lo siguiente son las manipulaciones con el Arduino. El hecho es que el voltaje de 2.4 voltios es pequeño, y para iniciar nuestro controlador necesita cambiar los bits del fusible del Arduino. Las instrucciones detalladas sobre el firmware del cargador de arranque y los bits de fusibles están fuera del alcance de este tema, e Internet está lleno de esquemas y opciones. El resultado principal aquí es deshabilitar el control de potencia Arduino. Aquí está el diagrama de pinout ICSP Arduino Pro Mini.
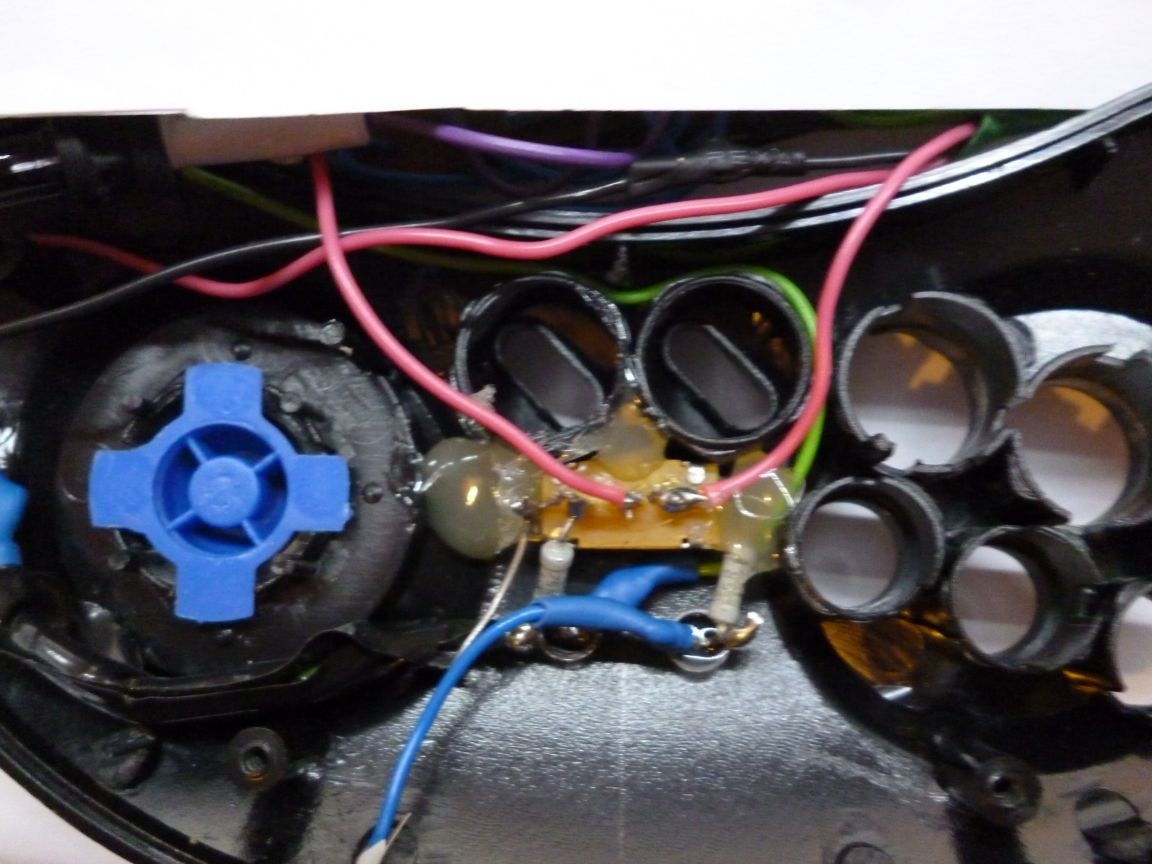
La segunda opción es más simple y no requiere manipulaciones adicionales con Arduino. Suelde al interruptor el cable positivo de nuestro compartimento de la batería, menos al GND Arduino. Sacamos los cables haciendo un pequeño corte en la caja y pegamos el compartimento a la tapa posterior del joystick en una cinta de doble cara. Se pone así:

No se ve muy hermoso, pero es más rápido y tiene menos problemas.
Paso 4 Asamblea
Entonces obtuvimos la siguiente construcción:
Al ensamblar, es necesario tender los cables para que no sean mordidos por las partes internas del joystick. No tuve éxito de inmediato, pero después de cinco intentos todo saldrá bien. Aquí está mi ensamblaje de control remoto.

Paso 5 firmware
Nuestro control remoto se muestra a través de un conector conectado a USB-TTL, la carga también se realiza a través de él. No olvides presionar Restablecer cuando viertas el scratch.
Al escribir el firmware, escribí un conjunto aleatorio de números (códigos) para cada comando (botón). Utilizo estos códigos cuando escribo el firmware de un dispositivo administrado. Los códigos se envían tres veces, lo que elimina la posibilidad de omitir un comando. Cuando suelta el botón, también se envía un código que se utiliza para detener el dispositivo administrado.