


Tomé parte de mi diseño de las instrucciones de montaje de Lego Technic 42029. El resto es mi improvisación. Entonces necesitamos:
- Lego Technic 42029
- Arduino Nano 382P
- DRV 8833 (mejor que Populus, pero también puede tener una contraparte china)
- 2 servoaccionamientos SG-90
- receptor IR
- Caja de engranajes del motor 200 rpm
- 2 LED
- 2 resistencias 150 ohmios
- Condensador 10v 1000uF
- 2 peines de una hilera PLS-40
- 2 conectores PBS-20
- Inductor 68mkGn
- 6 baterías NI-Mn 1.2v 1000mA
- Conector papá-mamá de dos pines para cablear
- Homutik
- Alambres de diferentes colores.
- soldadura
- Resina
- cuchillo de papelería
- soldador
- Pernos 3x40 y tuercas y arandelas para ellos.
- Pernos 3x60
- Baterías Ni-Mn 1.2v 1000mA 6pcs.
Paso 1 recogemos la parte trasera de la suspensión.
Primero, debe ensamblar la parte posterior de la suspensión de acuerdo con las instrucciones de Lego 42029 parte 1, a partir de 3 páginas y 8 inclusive. Luego, agregue algunos detalles para que pueda instalar el motor y la caja de cambios.
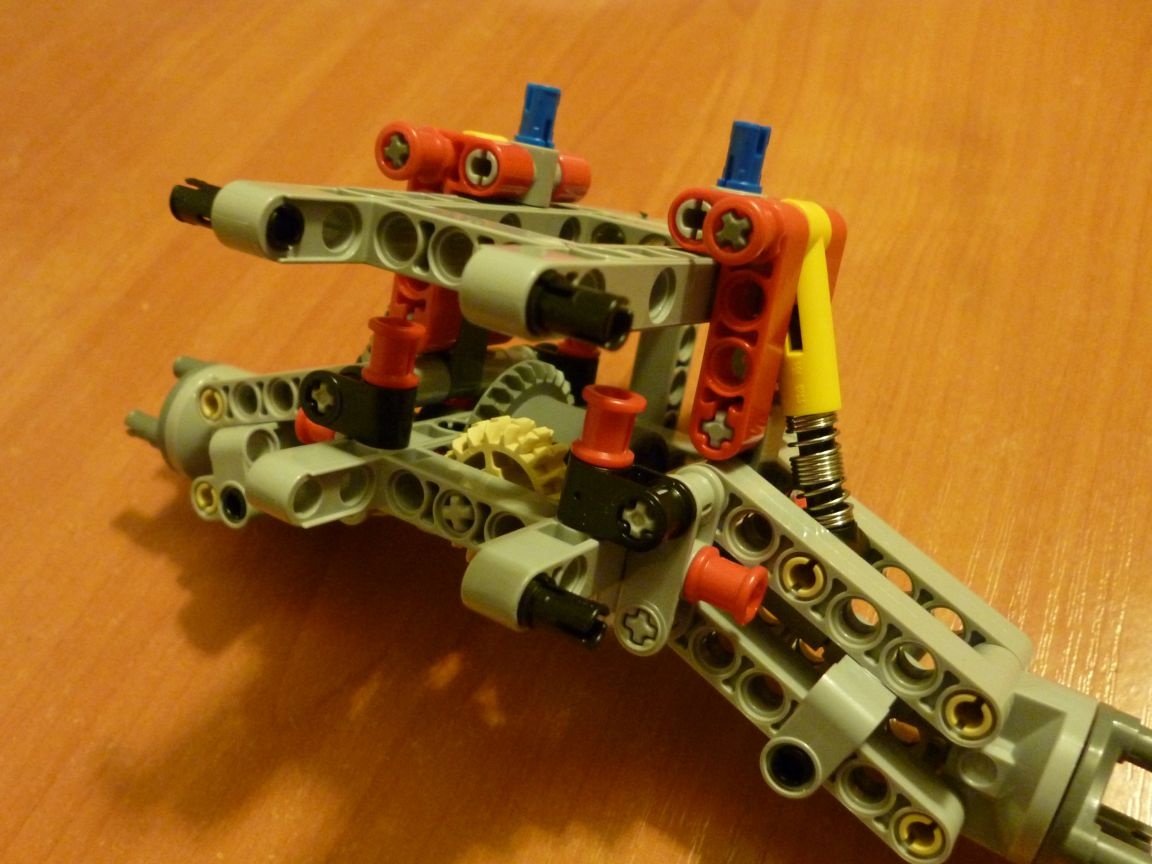
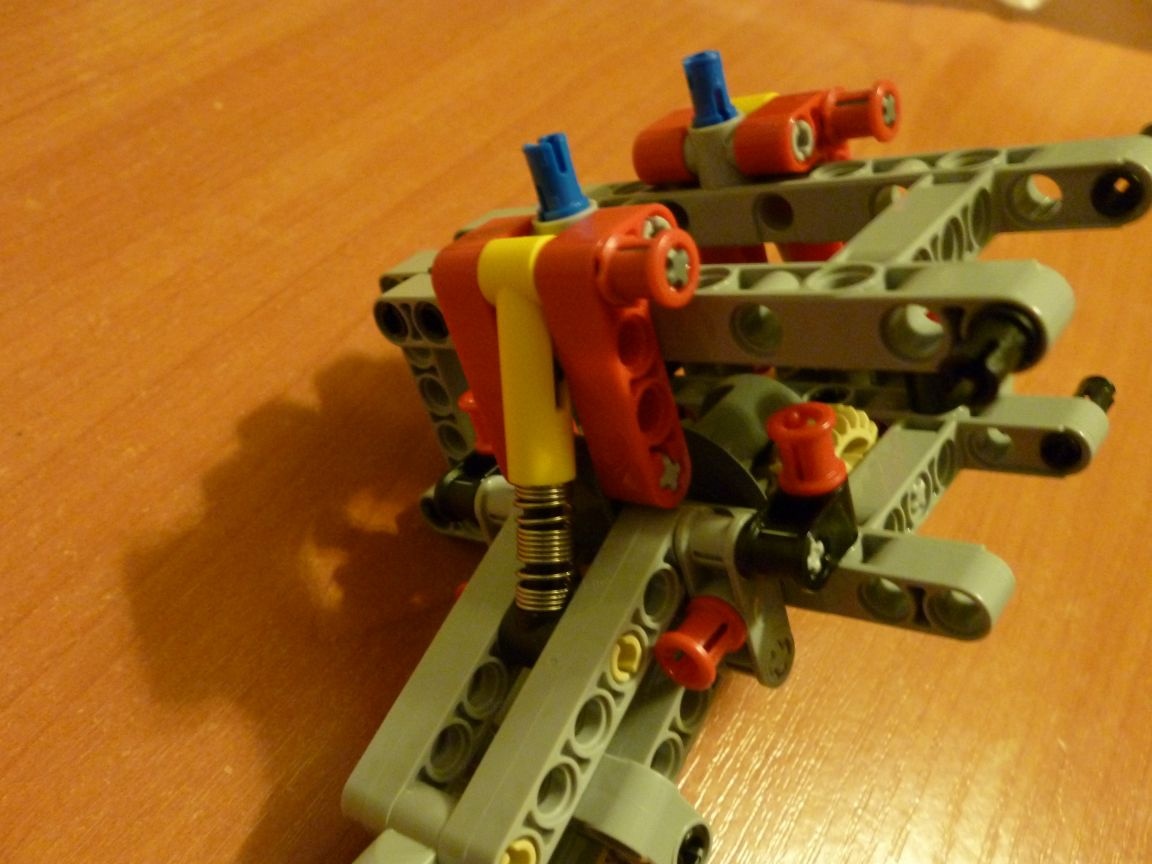

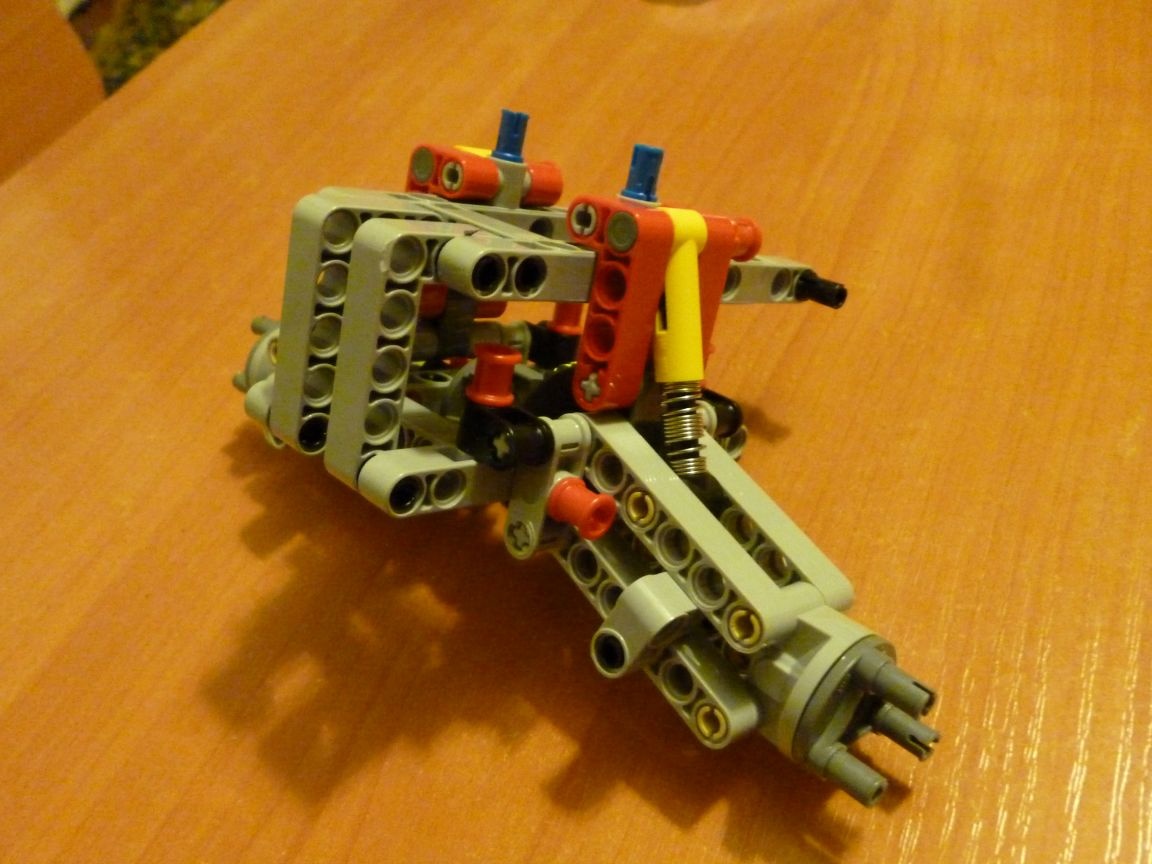
Paso 2 suspensión delantera.
Ensamblamos la parte delantera de la suspensión de acuerdo con las instrucciones de Lego 42029 parte 1, de la página 21 a la 23. Tomamos el trapecio de la segunda parte de las instrucciones de Lego de la página 6 a la 11. Montamos el cabrestante desde la segunda parte de la página 14 - 22. Y la segunda parte del parachoques tiene 34-36 páginas.
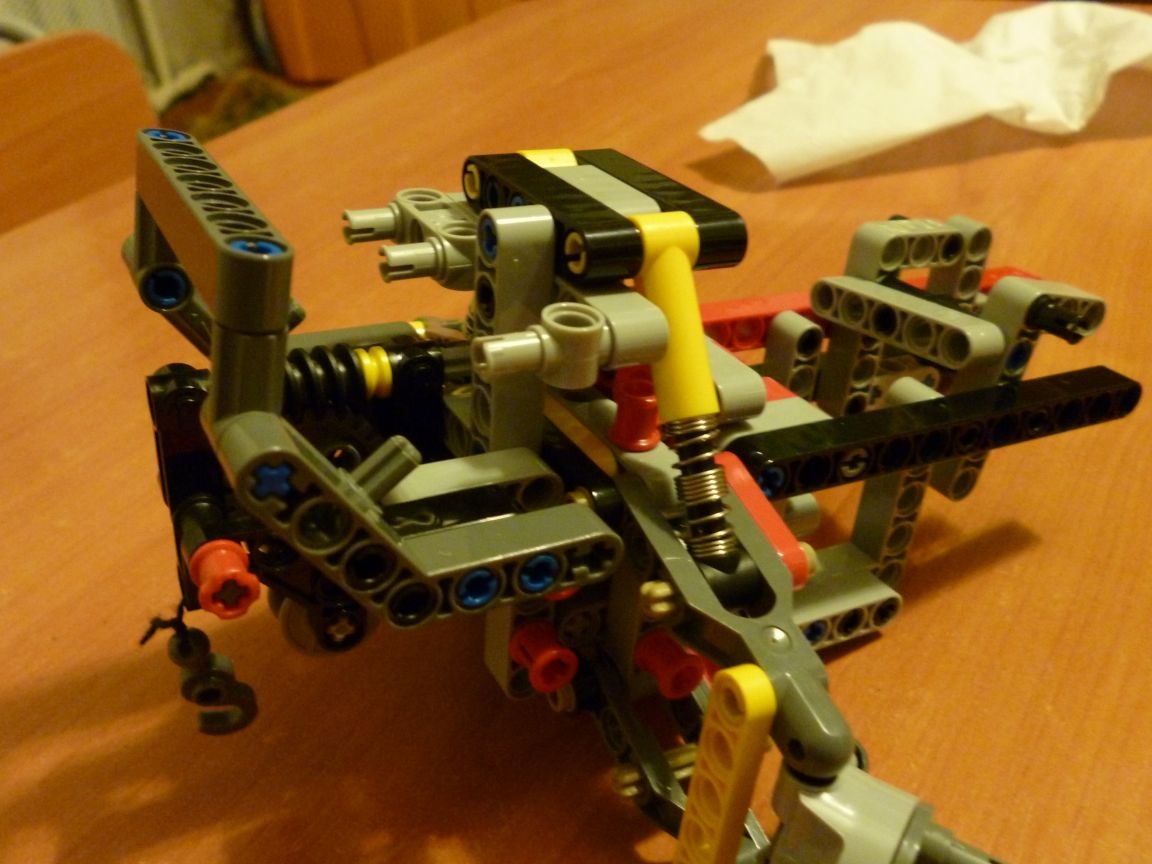
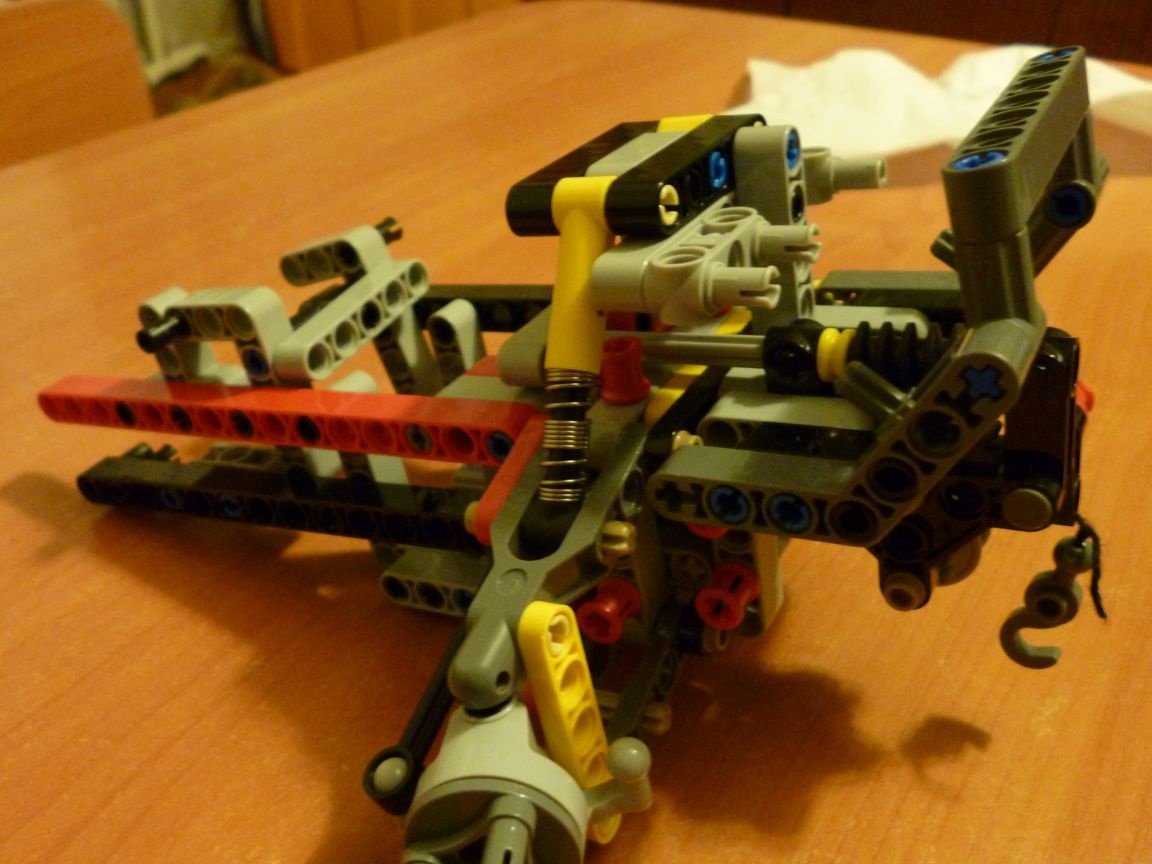
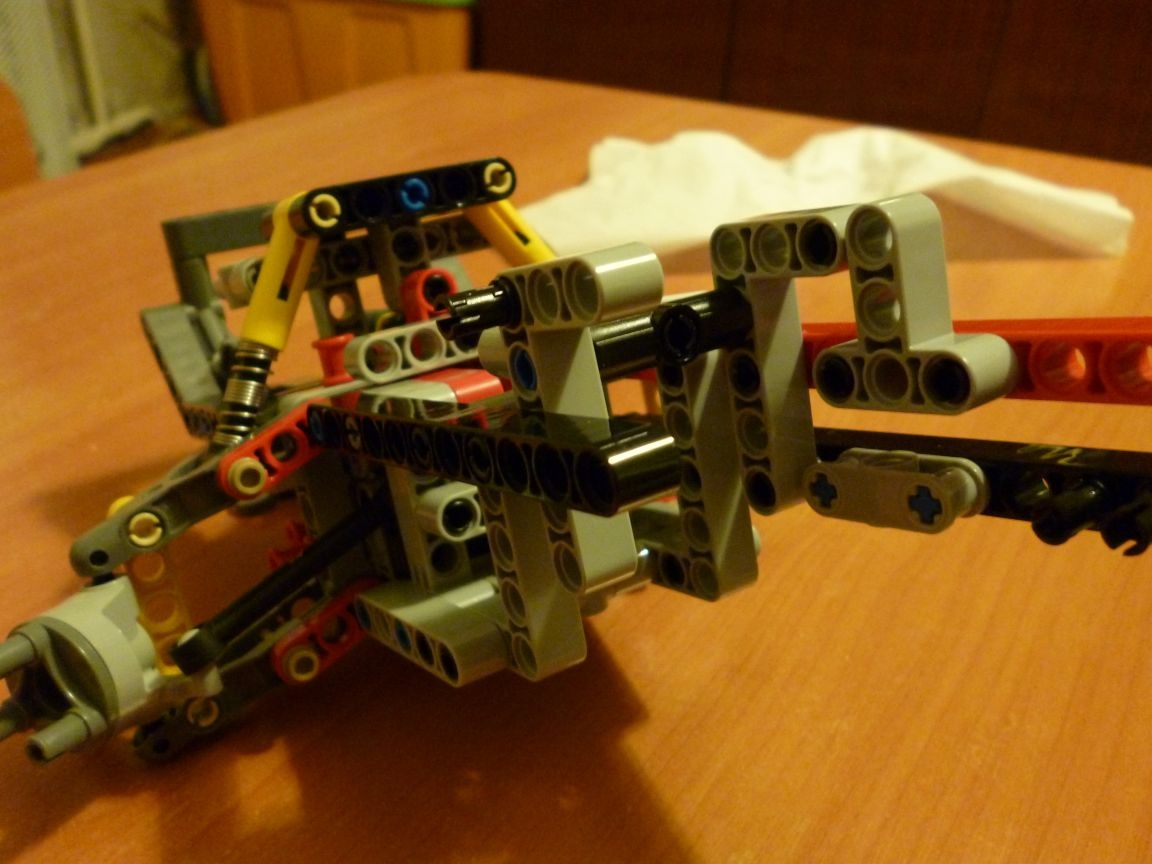
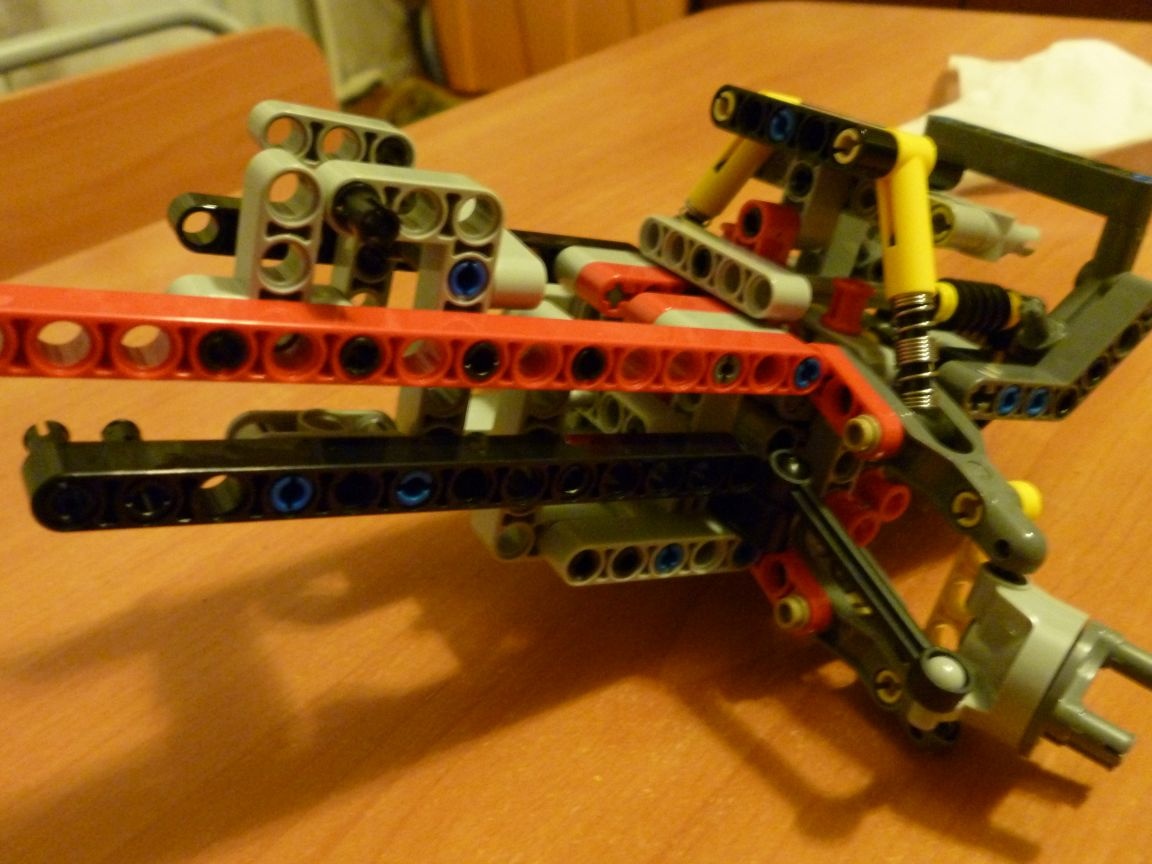

Paso 3 ensamblar el chasis.
Conectamos ambas partes como se muestra en la foto:

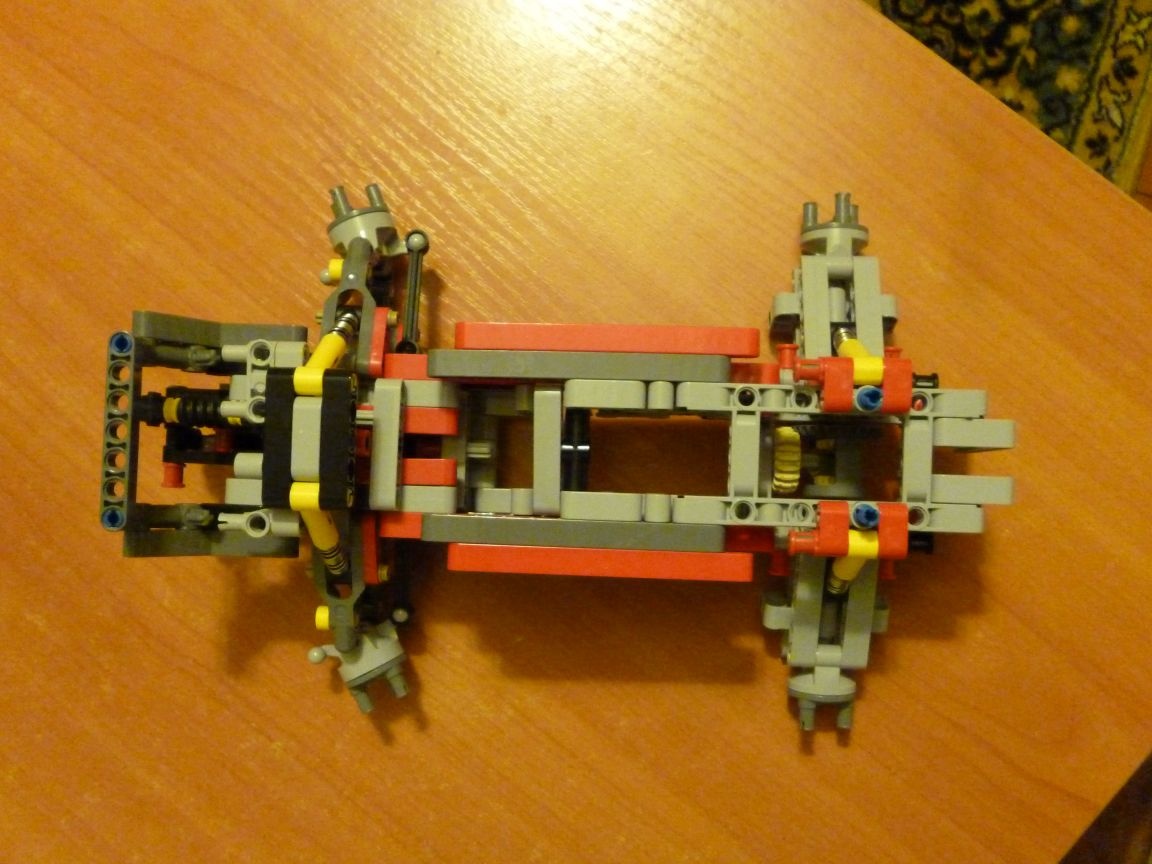
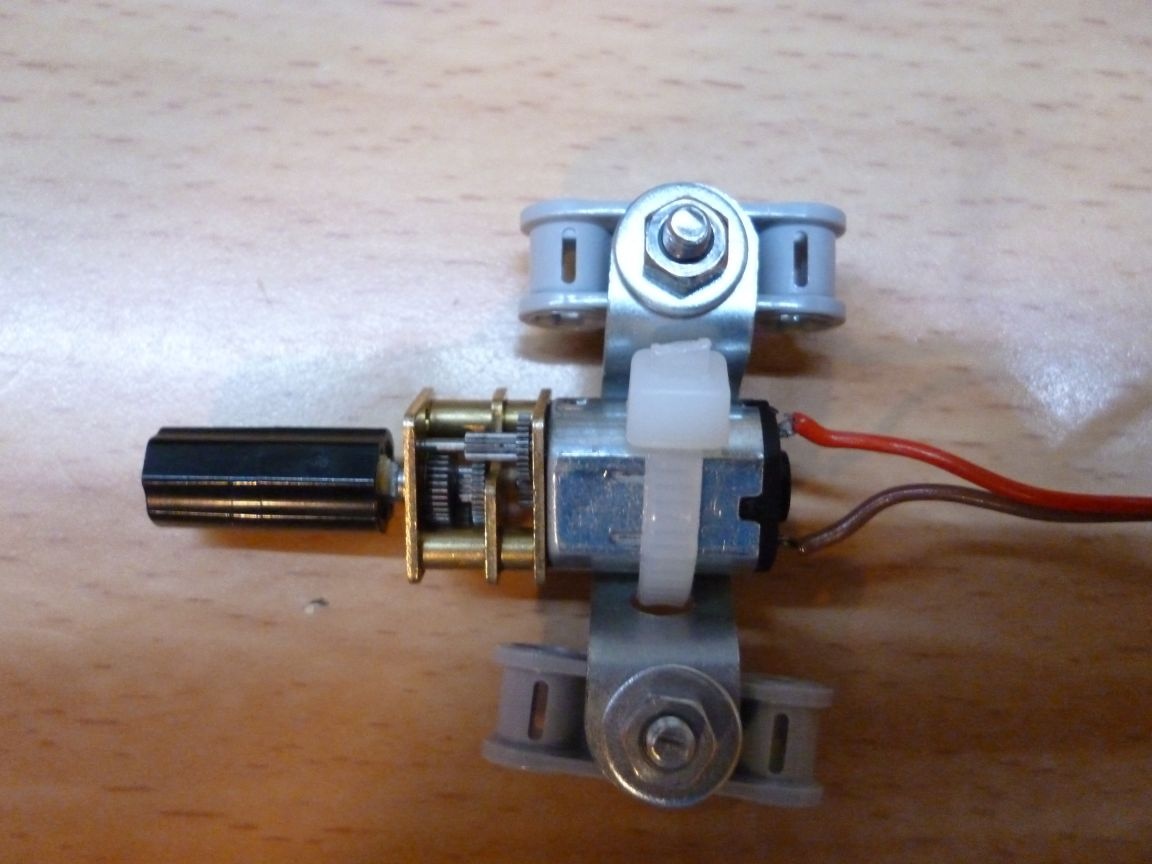
Resolví el problema de conectar el motorreductor con las partes del diseñador de la siguiente manera: coloqué en el eje del motorreductor un manguito de conexión e inserté un trozo de una cerilla para su fijación. Para el montaje del motorreductor se utilizó plástico metálico de un diseñador de hierro y una abrazadera.
Resultó lo siguiente:
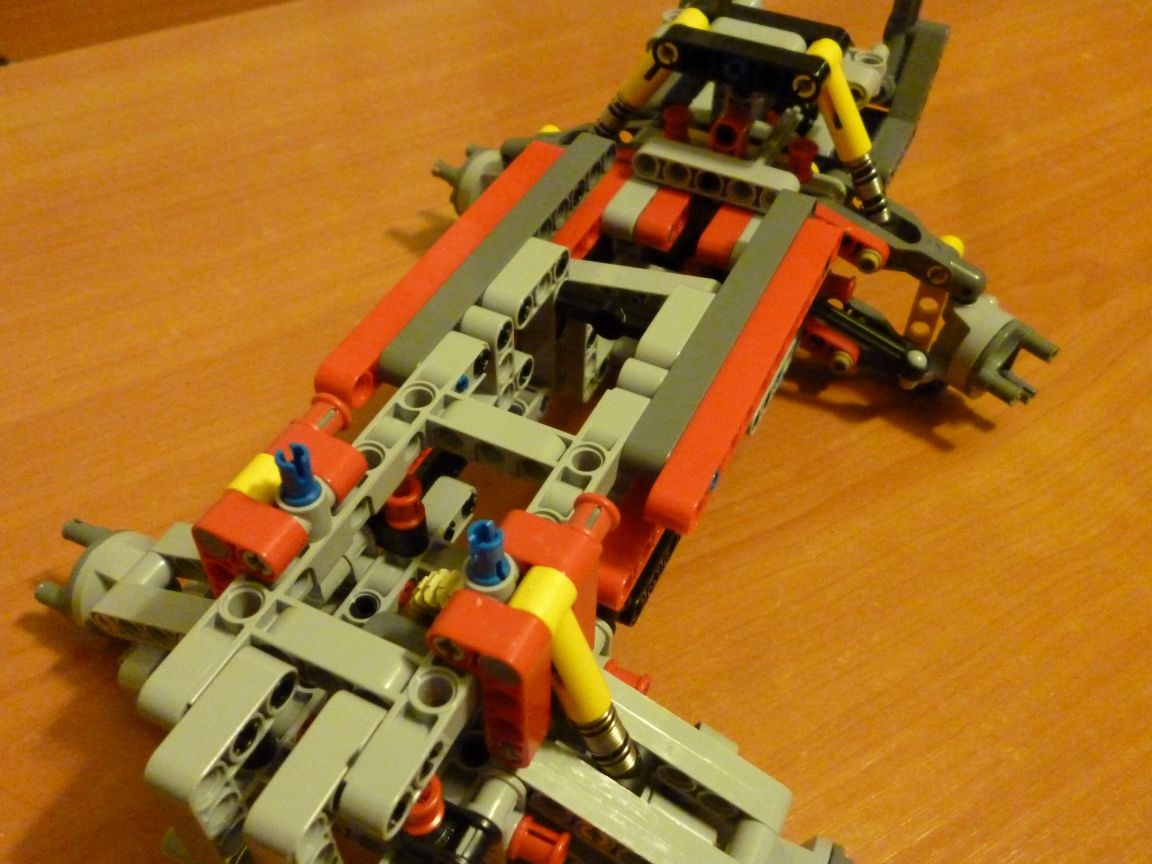
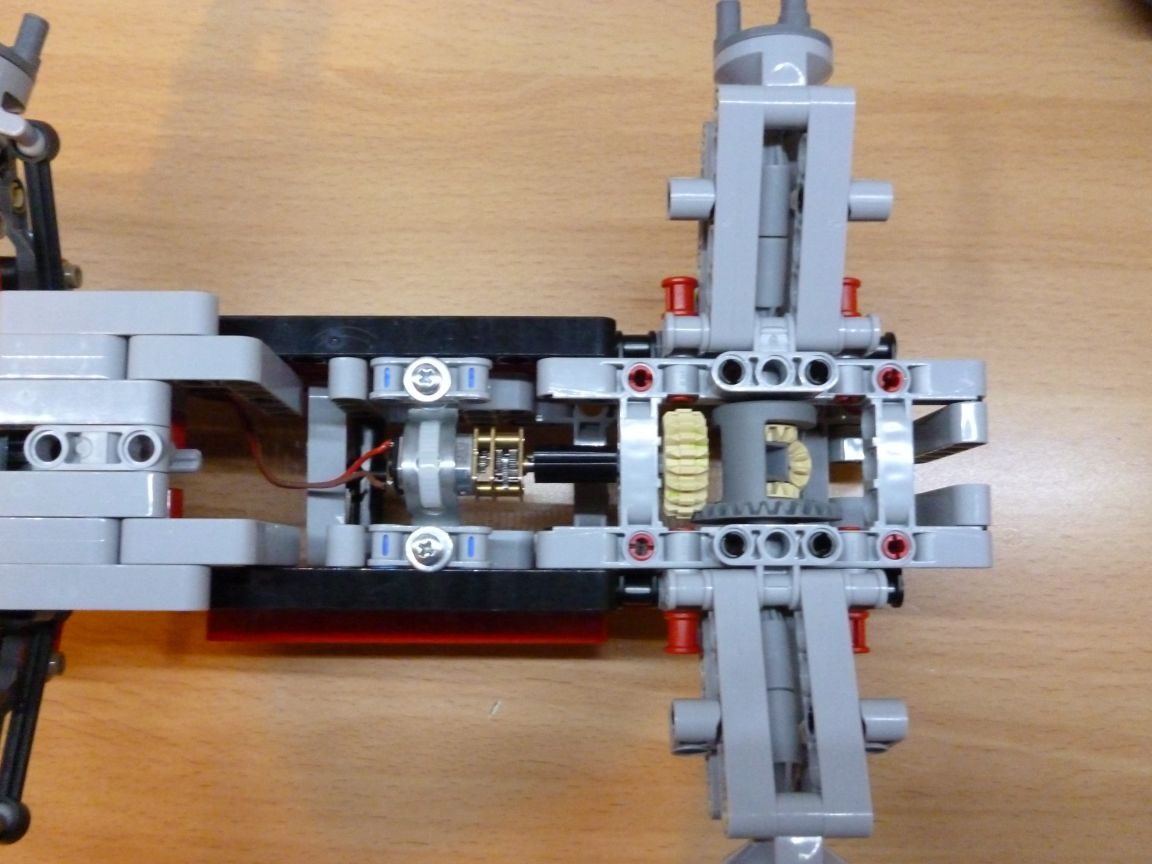
Montar en el chasis:
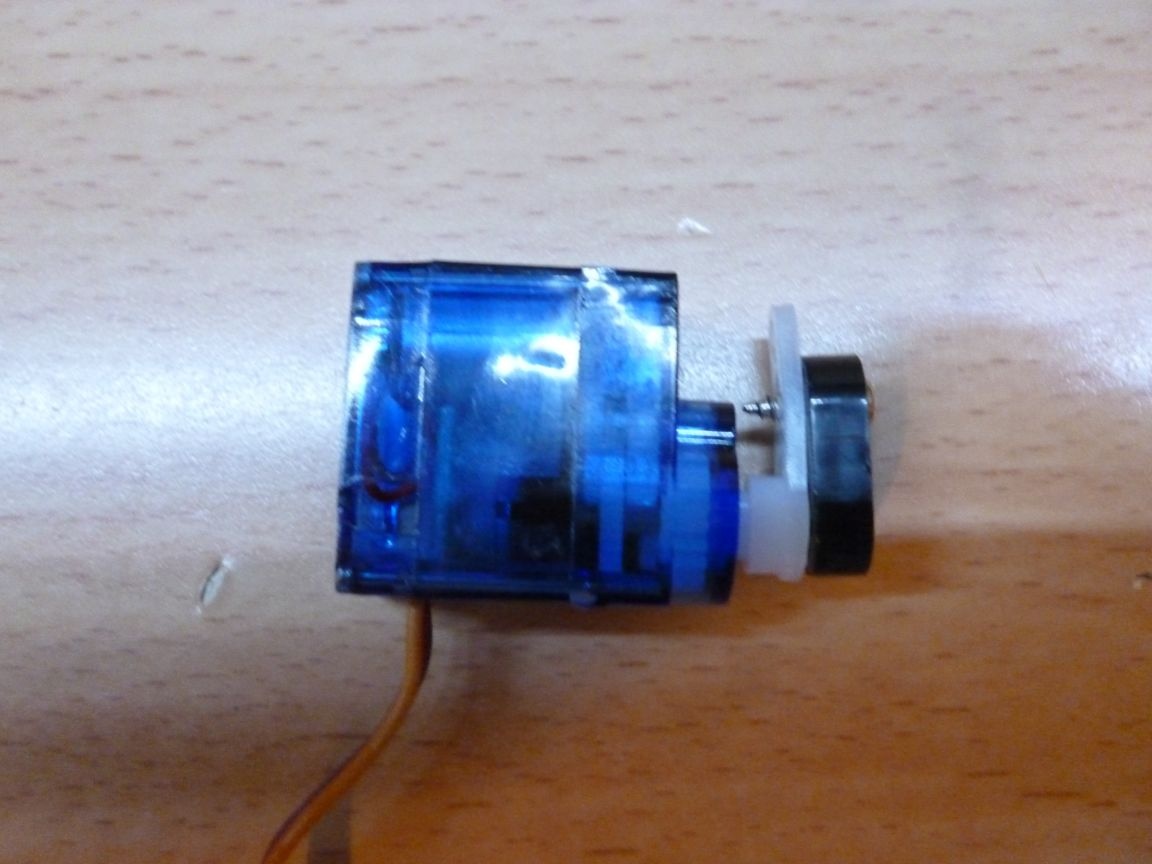
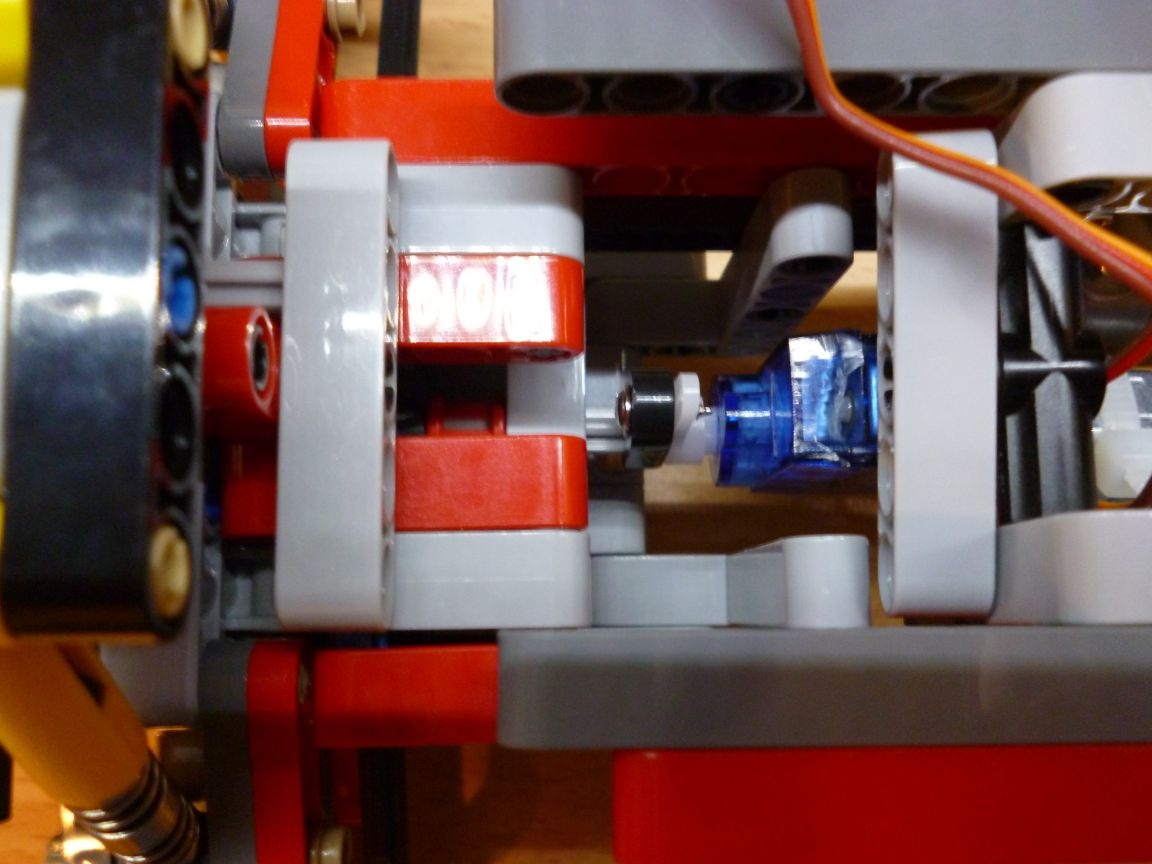
Para llevar a cabo la rotación tomó el servo SG-90. Es necesario perforar cuidadosamente, para no tocar las partes internas, un orificio pasante con un diámetro de 3.2 mm o simplemente cortar con un cuchillo de papelería. Y también corte las partes sobresalientes ("alas" para la fijación). Insertamos un tornillo en el agujero hecho y lo fijamos con tuercas. En el servoeje ponemos una palanca con una parte atornillada de lego:
Instalar:
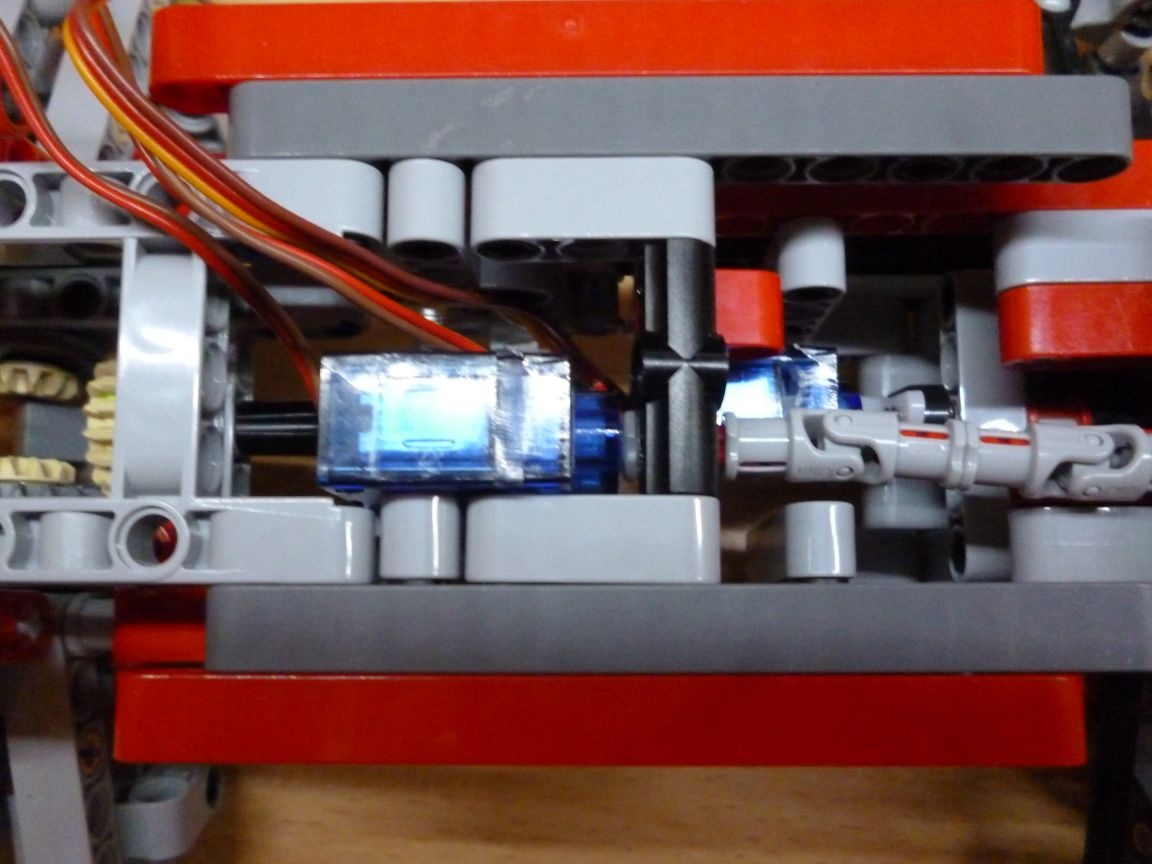
Usaremos el segundo servo para el cabrestante. Hacemos lo mismo que con el primero. Y ahora, necesita ser modernizado para que gire libremente. Para hacer esto, desarmamos el servoaccionamiento, retiramos la placa y soldamos los cables directamente al motor. Sacamos el engranaje principal y cortamos sus paradas de viaje.Y finalmente, hacemos una ranura con un cuchillo de oficina en el engranaje principal como en la foto:
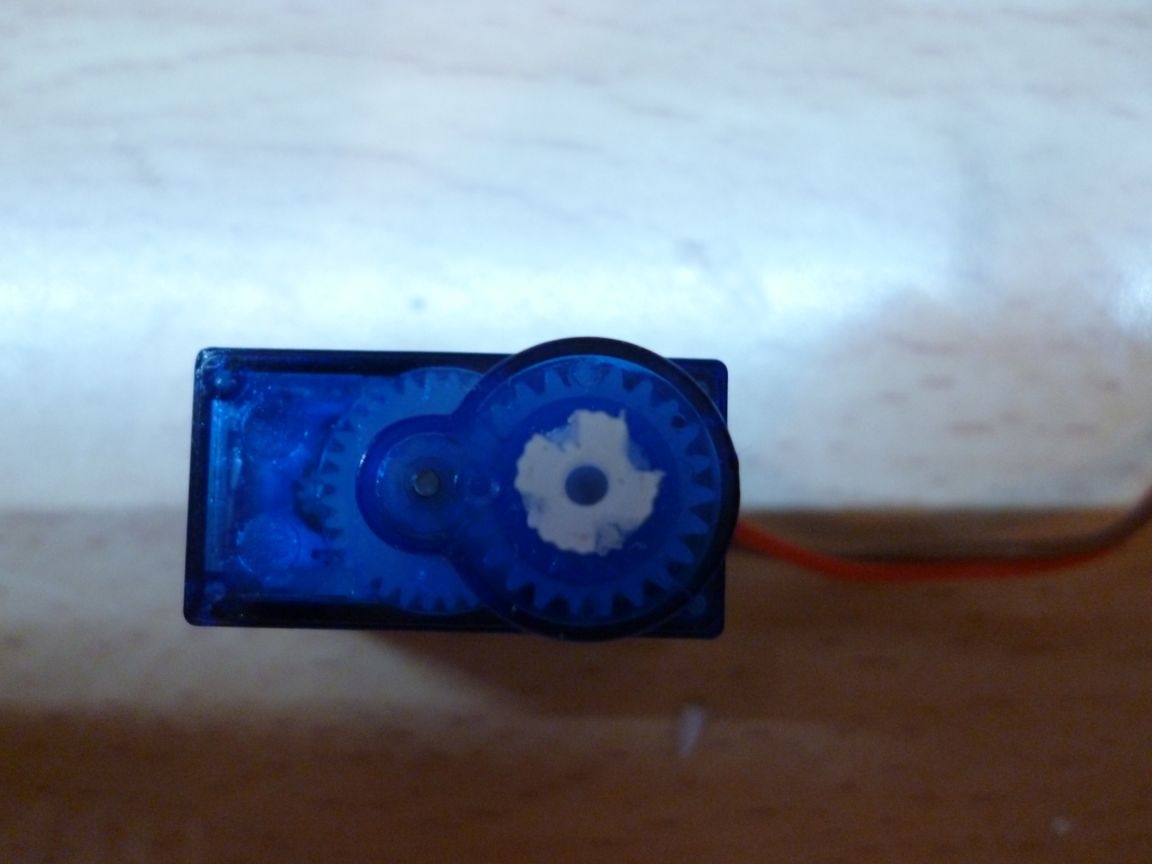
Nos conectamos a nuestro cabrestante y colocamos el chasis:

Paso 4 Controlador de gestión
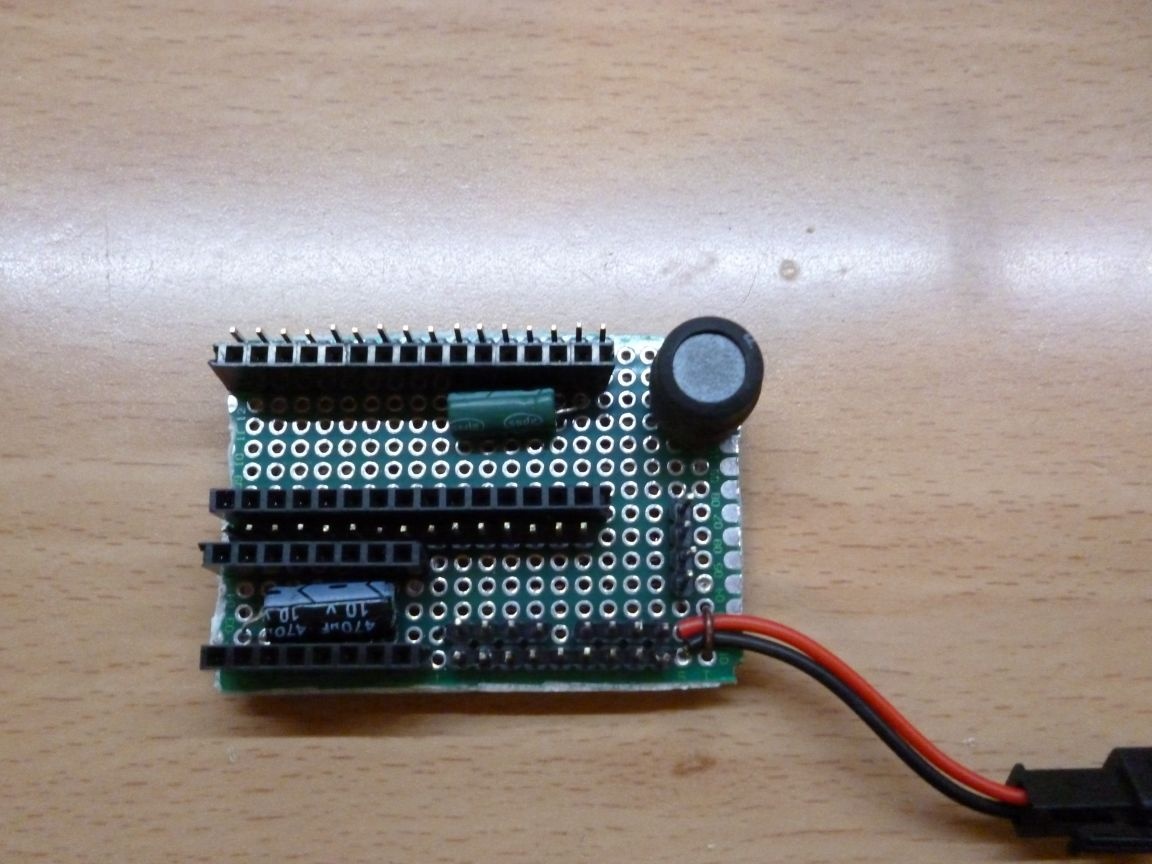
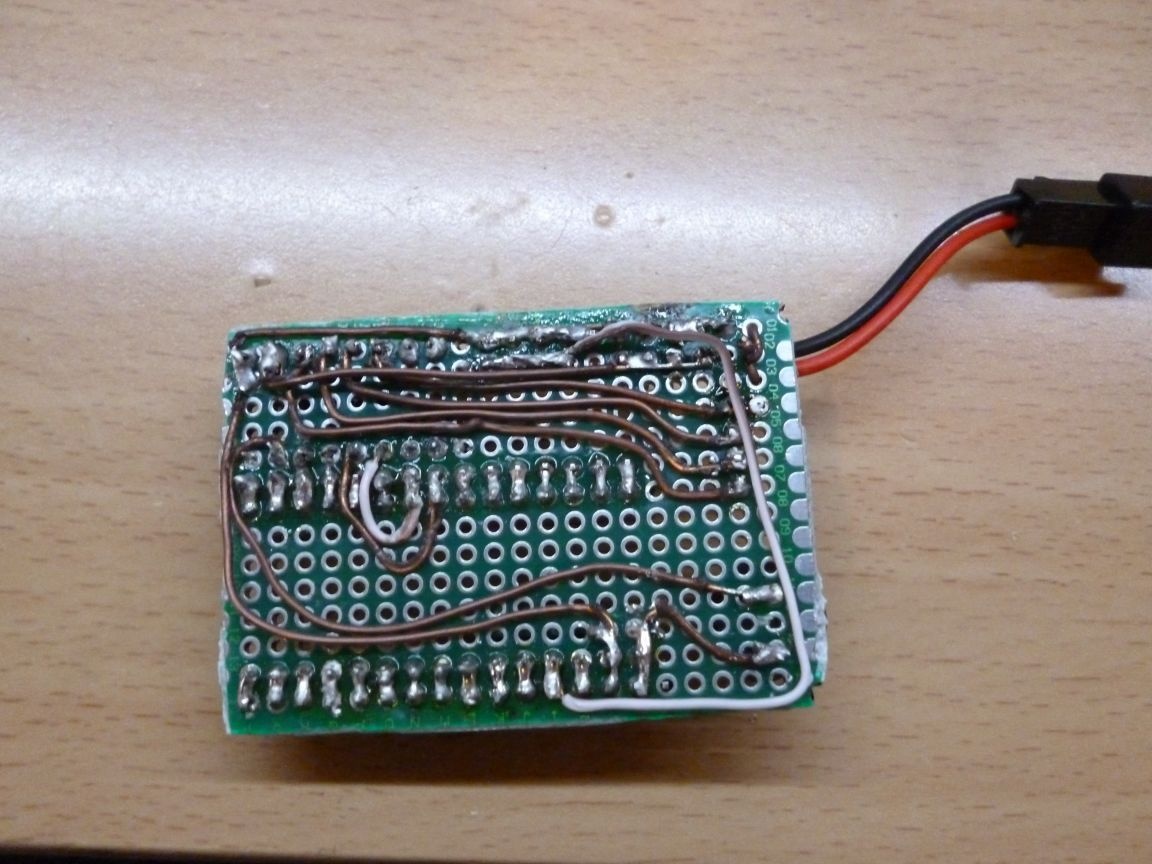
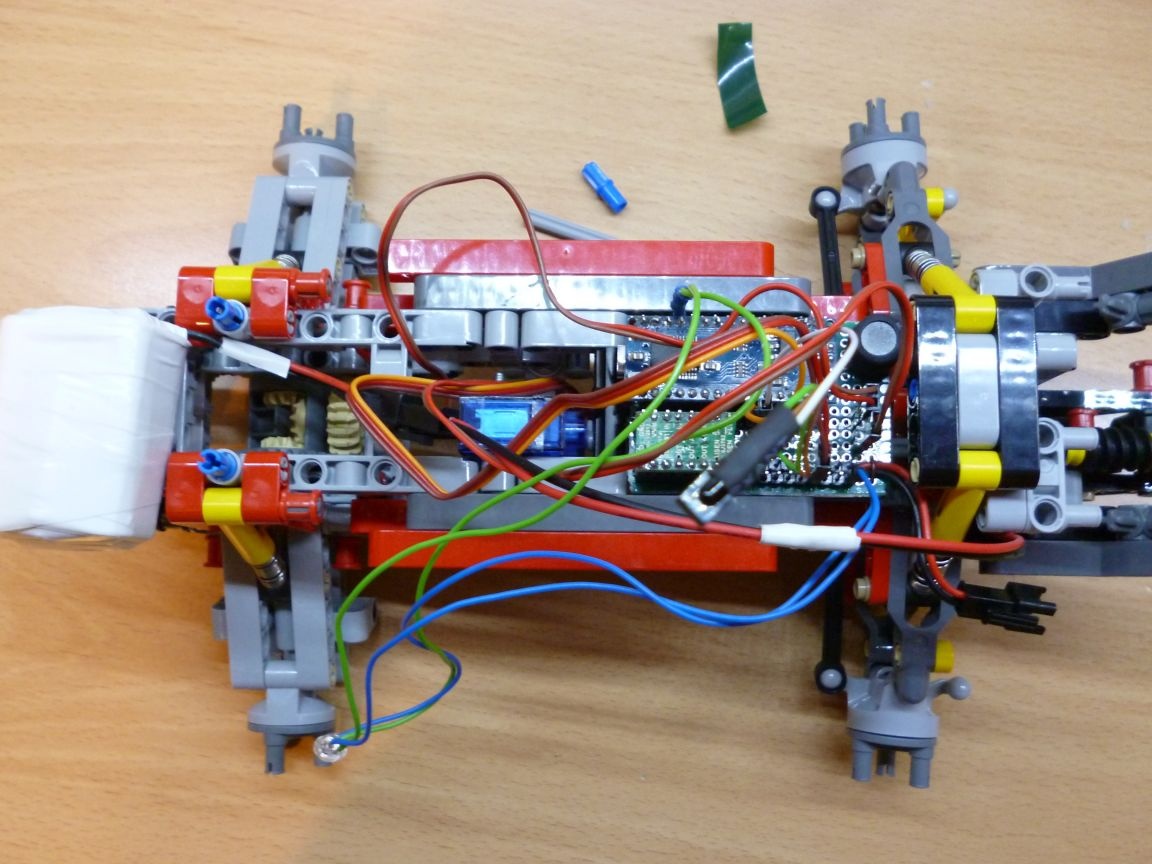
Para el control usaremos Arduino y el receptor IR. Tomamos un soldador y ensamblamos lo siguiente en la placa de circuito:
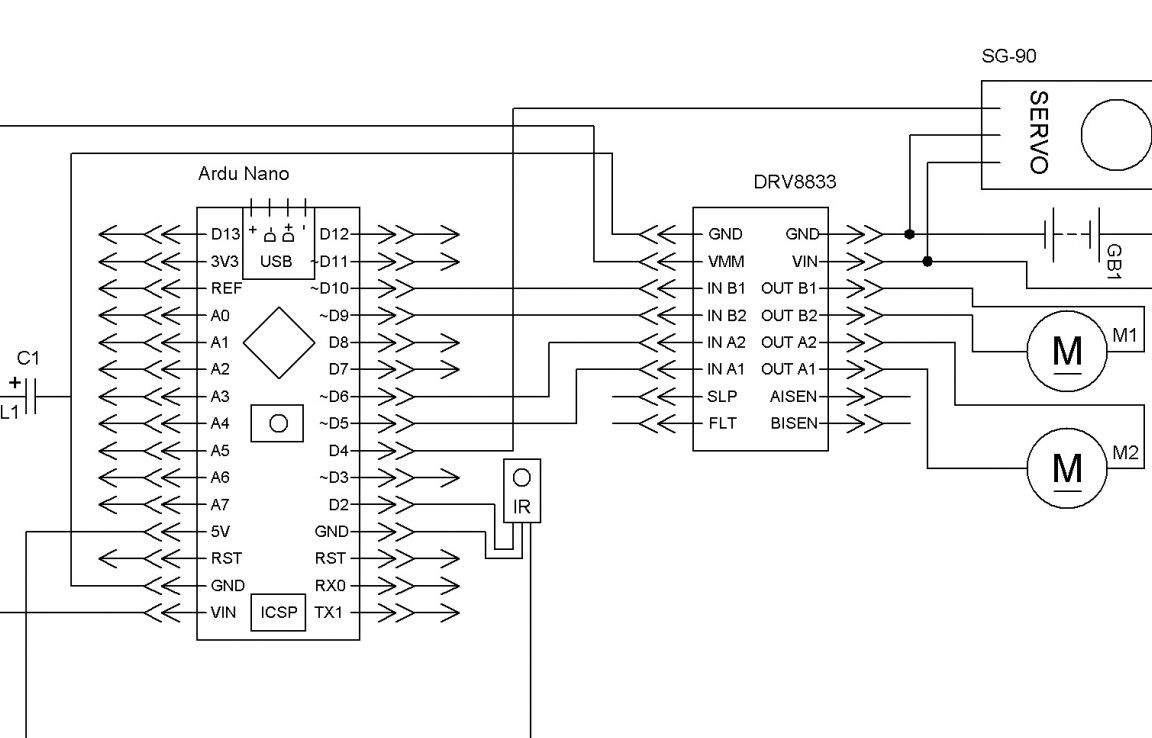
Yo explico: cualquier condensador de baja potencia, la bobina de inductancia que también encontrará, necesita estabilizar el voltaje del microcontrolador. Las resistencias se seleccionan para los LED utilizados. El receptor de IR o TSOP se puede tomar de un juguete viejo o comprar en una tienda de radio. Si hay una fuerte interferencia, agregue un condensador al circuito de alimentación del receptor IR.
Como resultado, obtenemos:
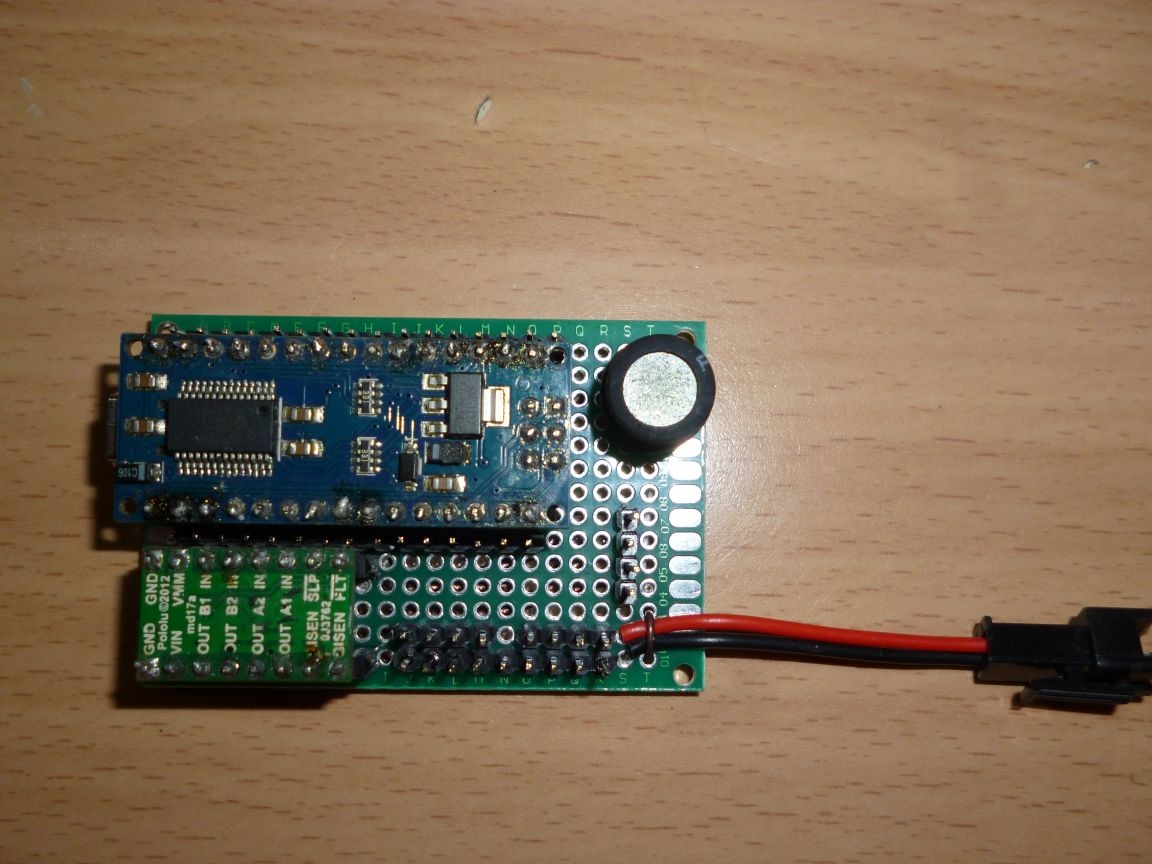
Instalamos Arduino Nano y DRV 8833 en sus lugares:
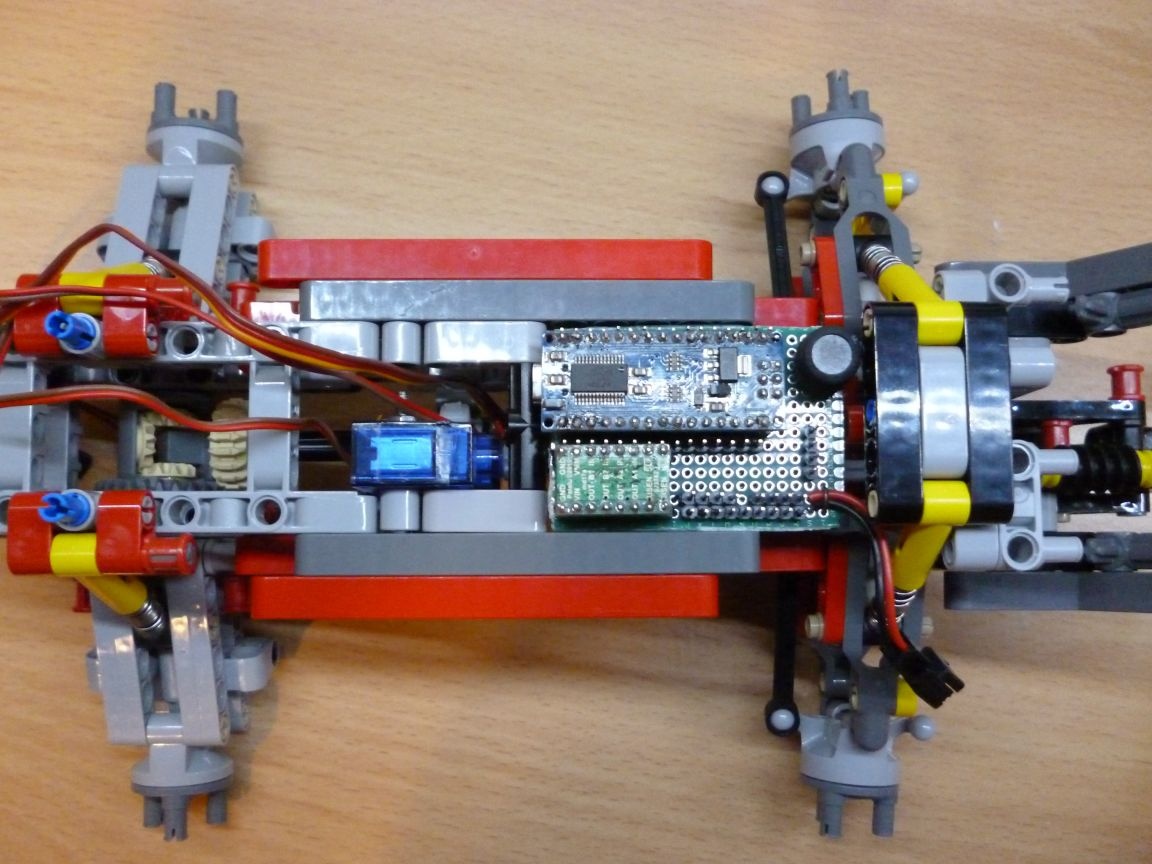
Y poner la placa en el chasis:
Fuente de alimentación - 6 baterías Ni-Mn 1.2v 1000mA. Es necesario soldarlos en serie y enrollarlos con cinta aislante. Pegue con cinta adhesiva de doble cara en la parte posterior del chasis.
Conectamos toda nuestra estructura:
Paso 5 cabina
La cabina es personalmente mi improvisación, no hay instrucciones preparadas, por lo que debe recoger de las fotografías.



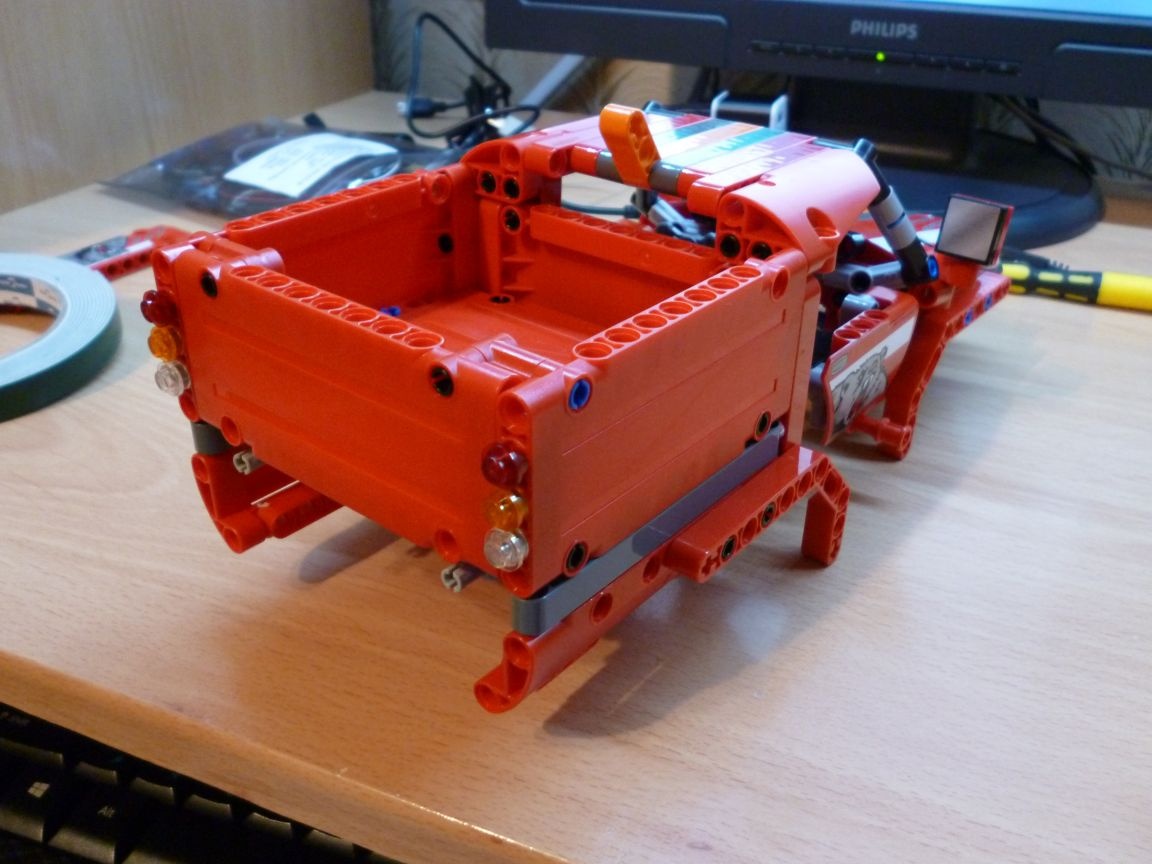
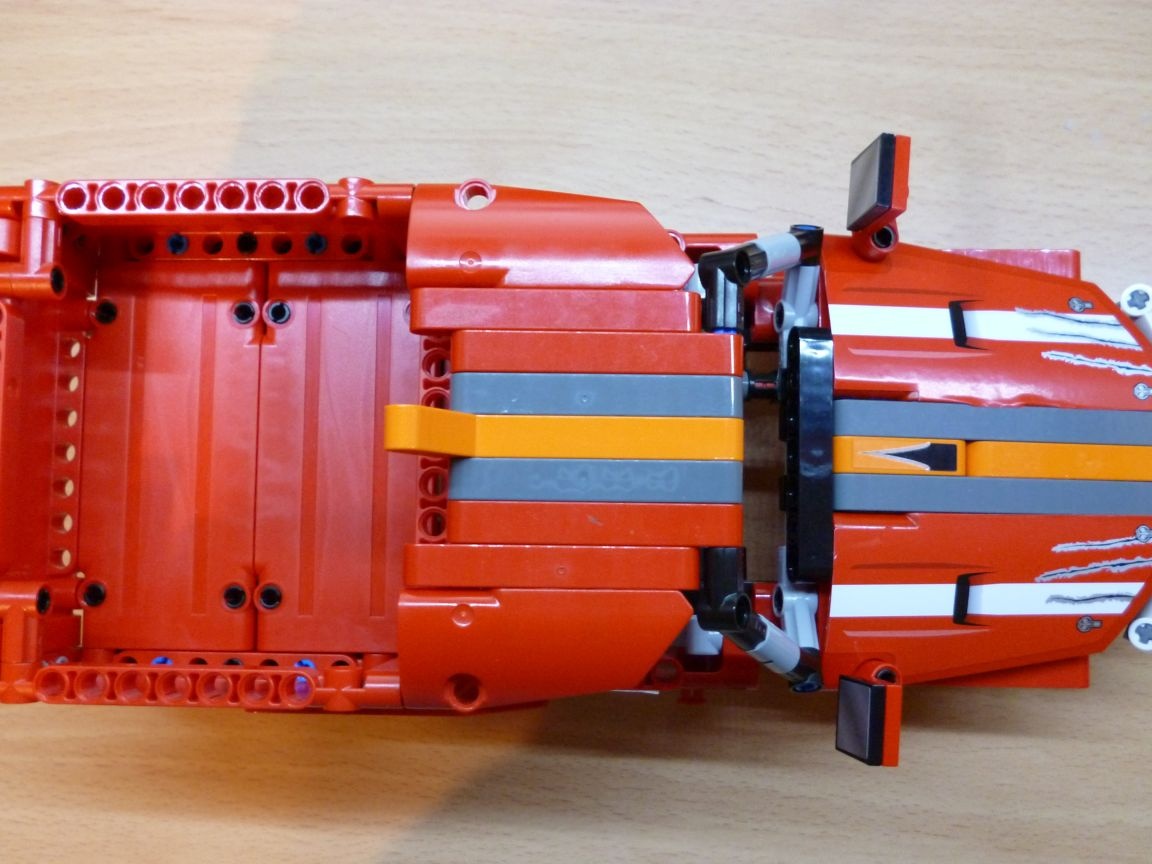
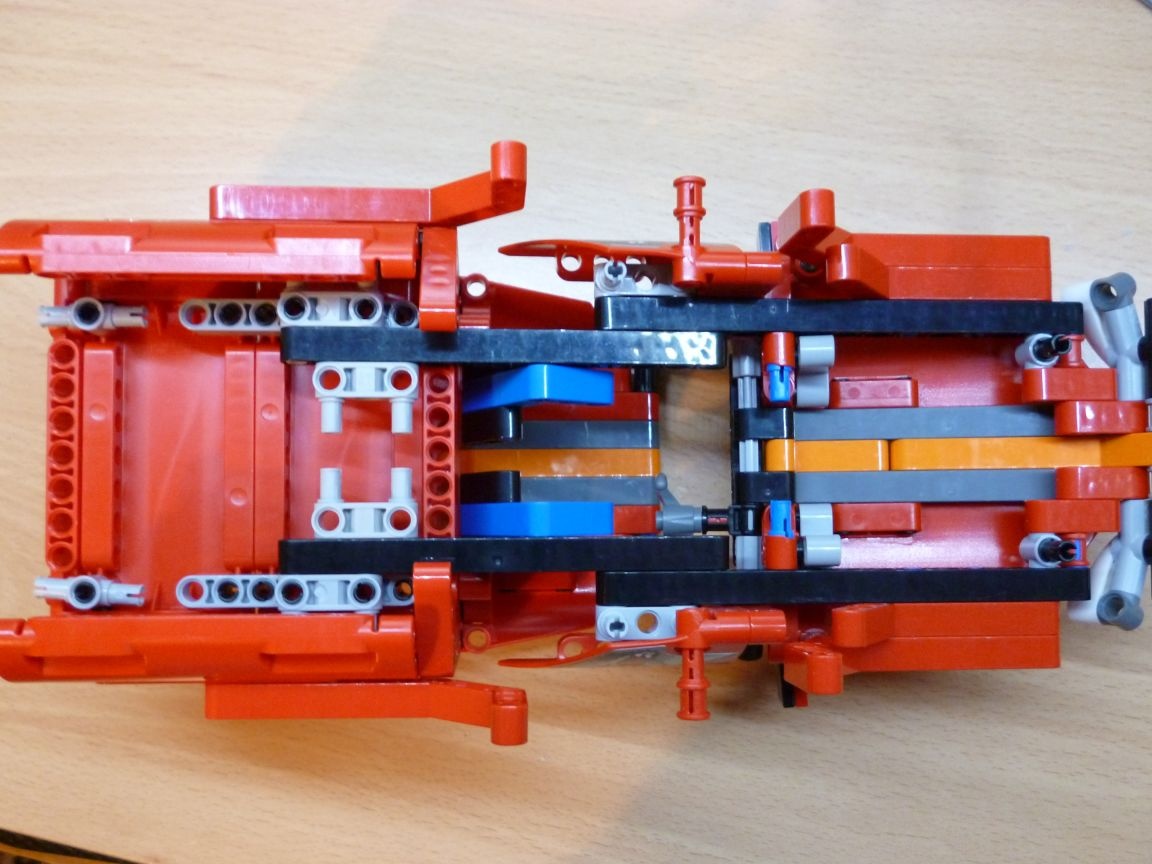
Puede armar su propia versión, solo necesita colocarla debajo del chasis. Lo principal aquí es hacer coincidir el montaje con el chasis. Hay cuatro de ellos y son claramente visibles en la foto desde la parte inferior de la cabina.
Paso 6 firmware.
Hoy, sin embargo, como siempre, programo en el IDE Arduino. Primero debe completar mi firmware y, a través del terminal, ver los códigos de control remoto que va a utilizar. Puede tomar cualquier control remoto IR, por ejemplo, desde un televisor, reproductor de DVD o armar el suyo (tengo un control remoto casero desde el joystick Sega). Al presionar un botón, en el terminal veremos el código del botón presionado, escríbalo en una hoja de papel. Hacemos esto con todos los botones en los que queremos programar las acciones. A continuación, edite el boceto. Anotamos nuestros códigos en él para las acciones necesarias y lo flasheamos nuevamente. Este firmware está configurado en mi control remoto de joystick Sega. En el proceso de jugar con la máquina, noté algunos matices o inconvenientes. Es difícil lograr una recepción confiable de los comandos IR durante el movimiento. Y sucede así: presione la flecha hacia adelante, la máquina recibió un comando para ir, y se apresuró hacia adelante, soltó la flecha, pero no recibió un comando de detención, y continúa conduciendo hasta que se bloquea o se atasca, está llena de averías. Parcialmente, este problema se puede resolver aumentando el número de intentos de enviar un comando, sin embargo, esto solo es posible cuando se usa el control remoto usted mismo. Pero elegiré una solución más cardinal: cambiaré a un transmisor-receptor de 433MHz. Escribiré sobre esto en el próximo artículo.
Paso 7 poner sobre ruedas.
Entonces, solo tenemos que poner la cabina en el chasis, poner las ruedas y revisar nuestro SUV en acción.

