

Buenos días amantes de arduino! Como estaba colgado en Internet, me encontré con un artículo bastante entretenido sobre cómo hacer de una mano un manipulador que repita los movimientos de la mano de una persona, inspirado en la simplicidad y el efecto. hecho en casa hecho en casa decidió recogerlo. Encontré sensores doblados en Alliekspress para la mano del transmisor y me quedé un poco muerto, una cosa estaba en la región de $ 15-20, resulta que 5 de esos sensores para una sola mano costarán $ 75-100 y ¡esto es solo para los sensores! Después de un tiempo, aprendí a hacer tales sensores hazlo tu mismoResulta ser muy simple y barato.
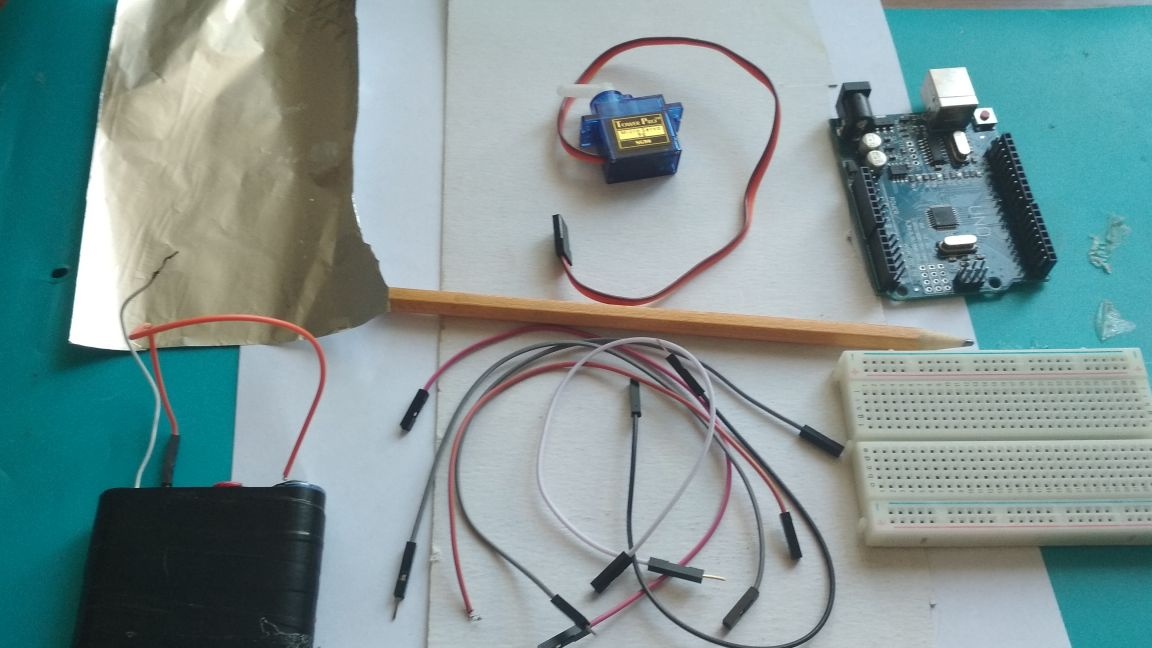
Y para el sensor de curva necesitamos:
pago Arduino Uno ()
-panel de pruebas
- cables de conexión como "padre-madre" o "padre-padre"
-servomotor
cartón
papel
florete
lapiz
- fuente de alimentación de 6 a 12 voltios (uso 4 baterías conectadas en serie a 1.5 V)
De las herramientas que necesitamos:
pistola de pegamento
tijeras
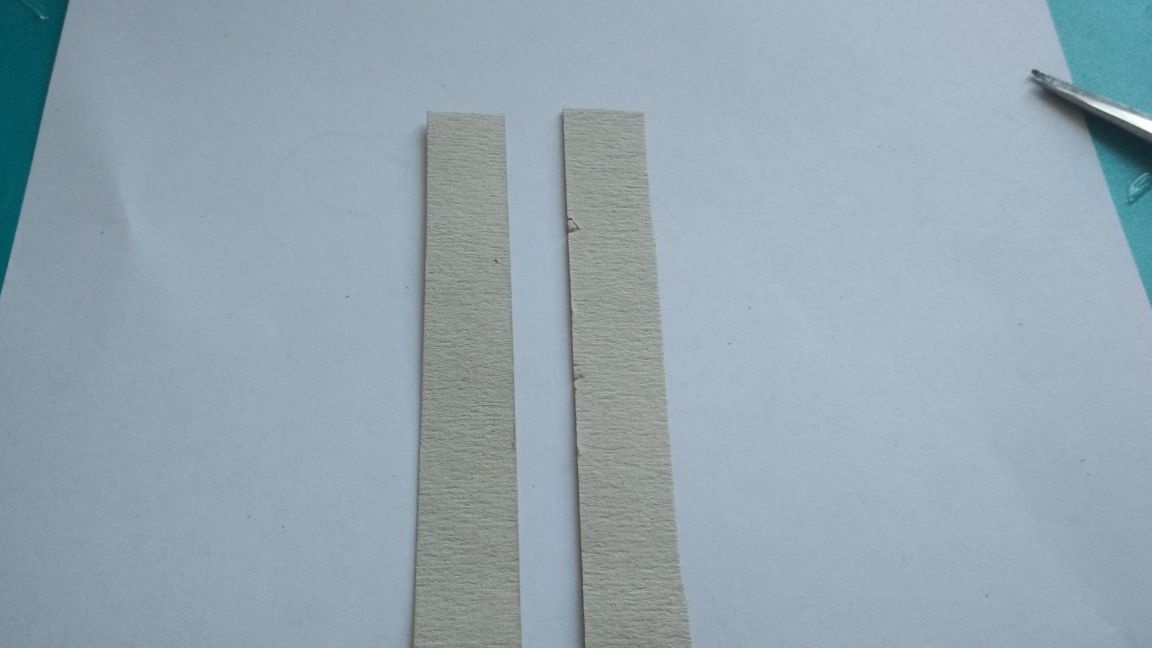
Entonces, lo primero que cortamos del cartón es dos tiras 2 cm más largas que su dedo índice y aproximadamente 1 cm de ancho:

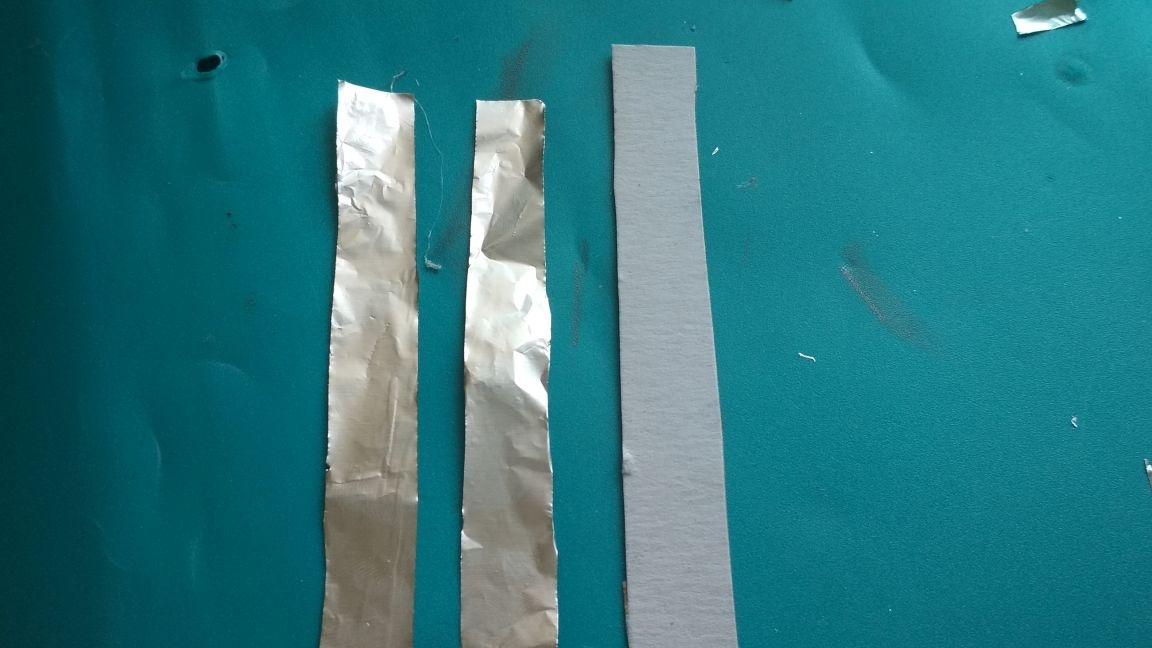
Corte una de las mismas tiras de papel un poco menos:

Lápiz sombree ambos lados de la tira de papel lo mejor posible:


Corte dos tiras de papel de aluminio más pequeñas que el papel:
Pégalos a las tiras de cartón como se muestra en la foto:

De los cables de conexión "padre-madre" cortamos la salida "madre" y limpiamos sus extremos del aislamiento:
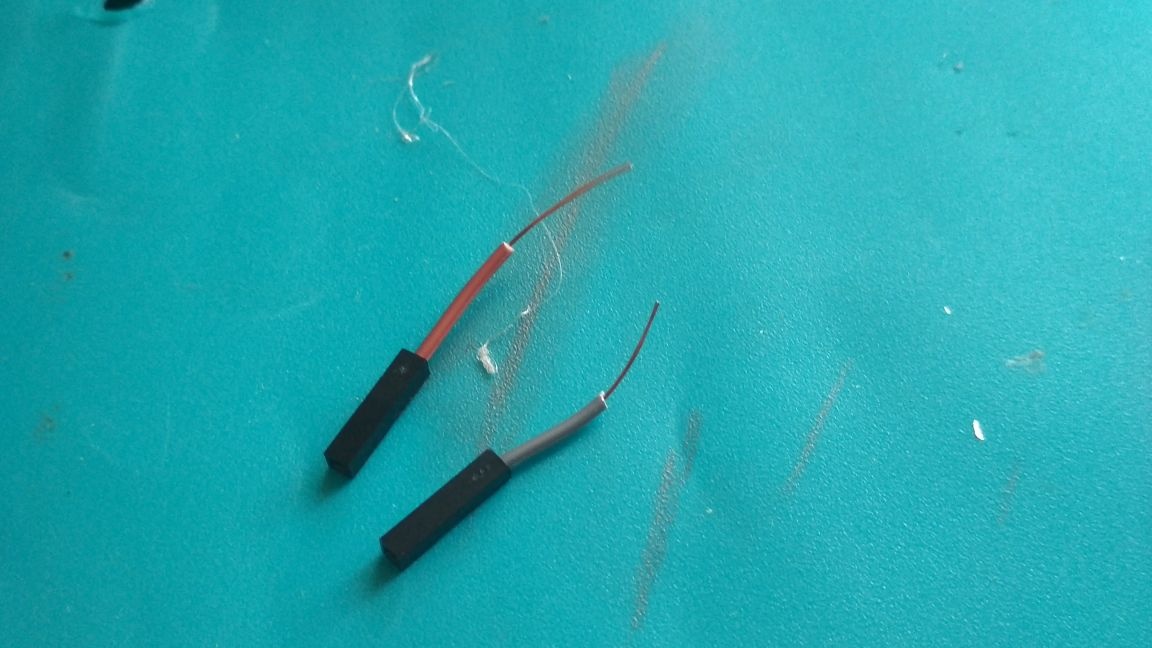
Adjuntamos desde cinta o soldadura:

Adjuntamos una tira de papel a una de las mitades, para que esté en contacto con la lámina, luego cubrimos con la segunda mitad del lado con la lámina, presionamos y pegamos los lados:

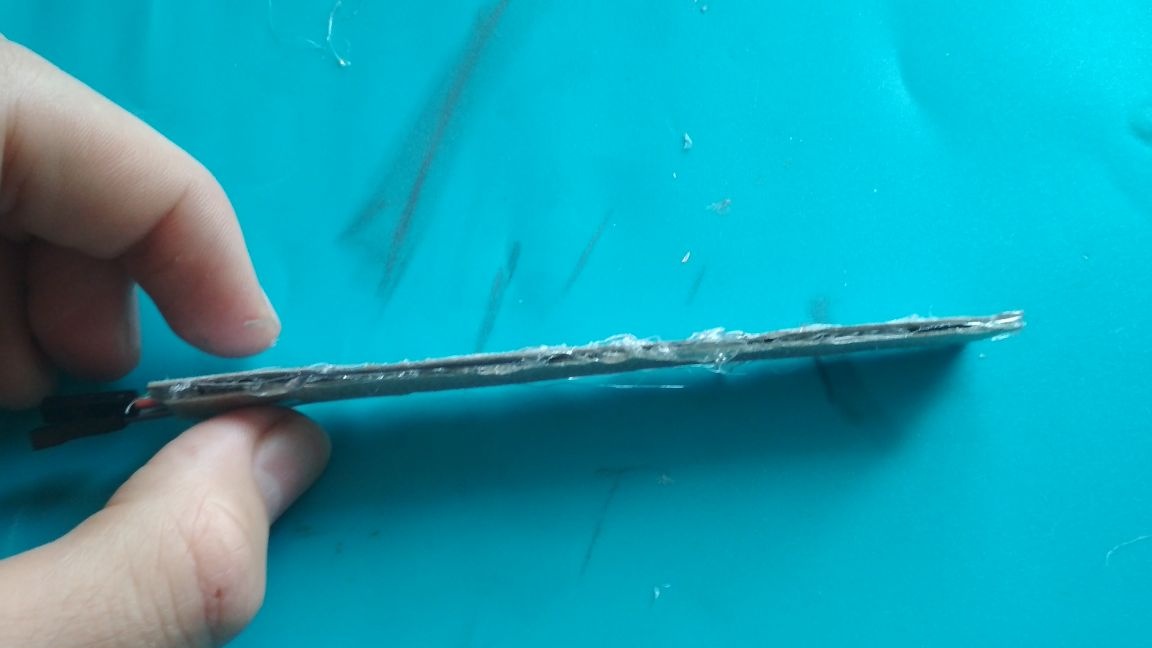

Hacemos tales "serpientes" en cada lado con la ayuda de pegamento caliente, son necesarias para que el diseño sea más flexible

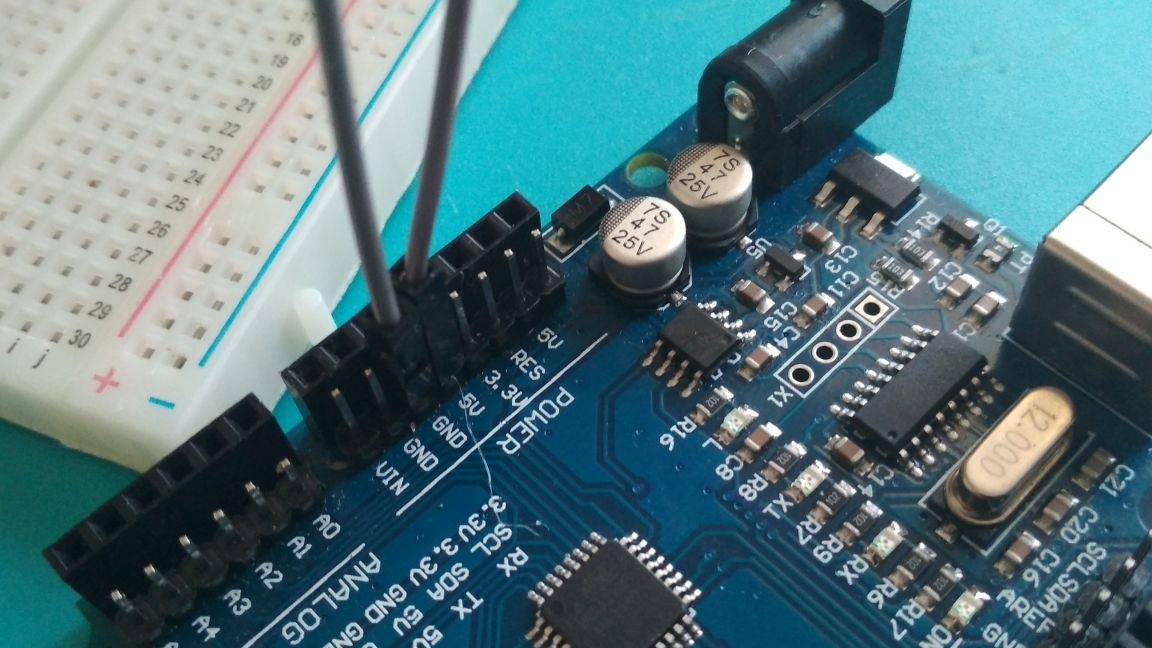
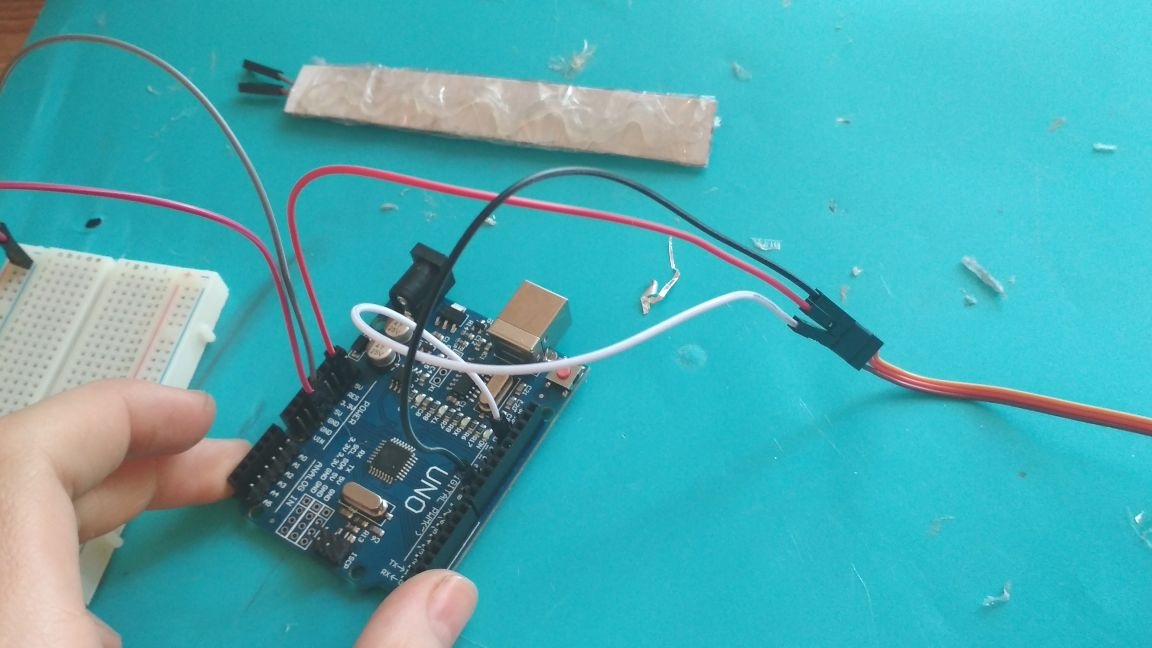
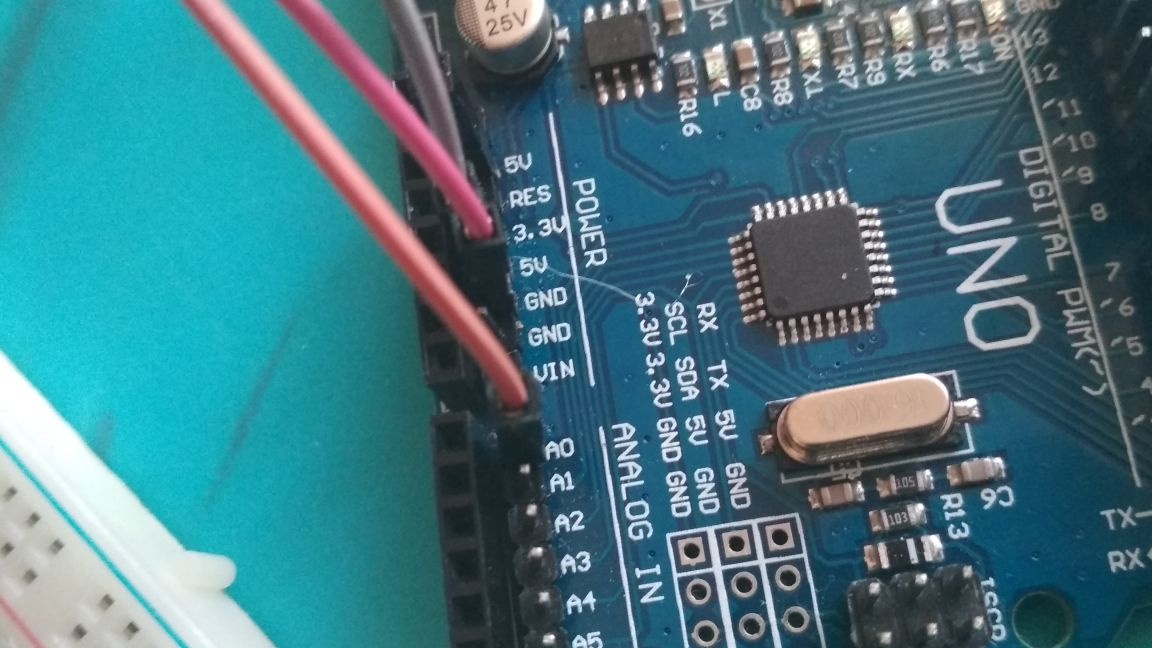
Tomamos un arduino y conectamos la salida de 5v al más de la placa de prueba, y Gnd al menos:

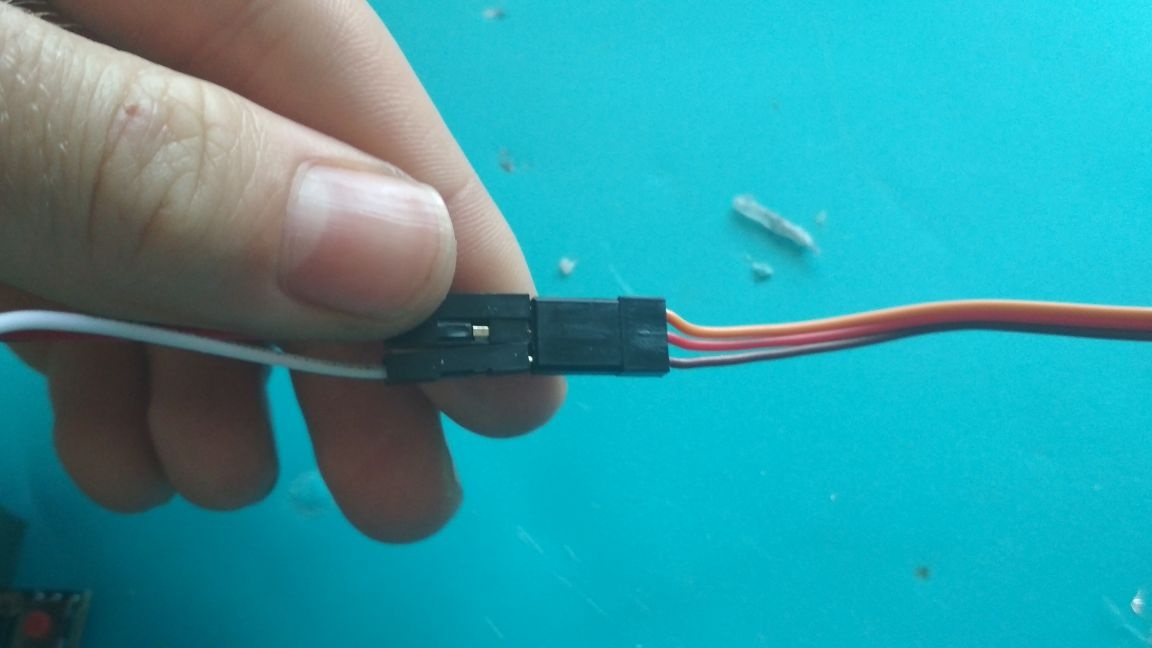
Agregue los cables de conexión al servomotor y conéctelo al arduino de la siguiente manera:
Cable marrón a gnd
rojo a 5v
naranja a 9 pines
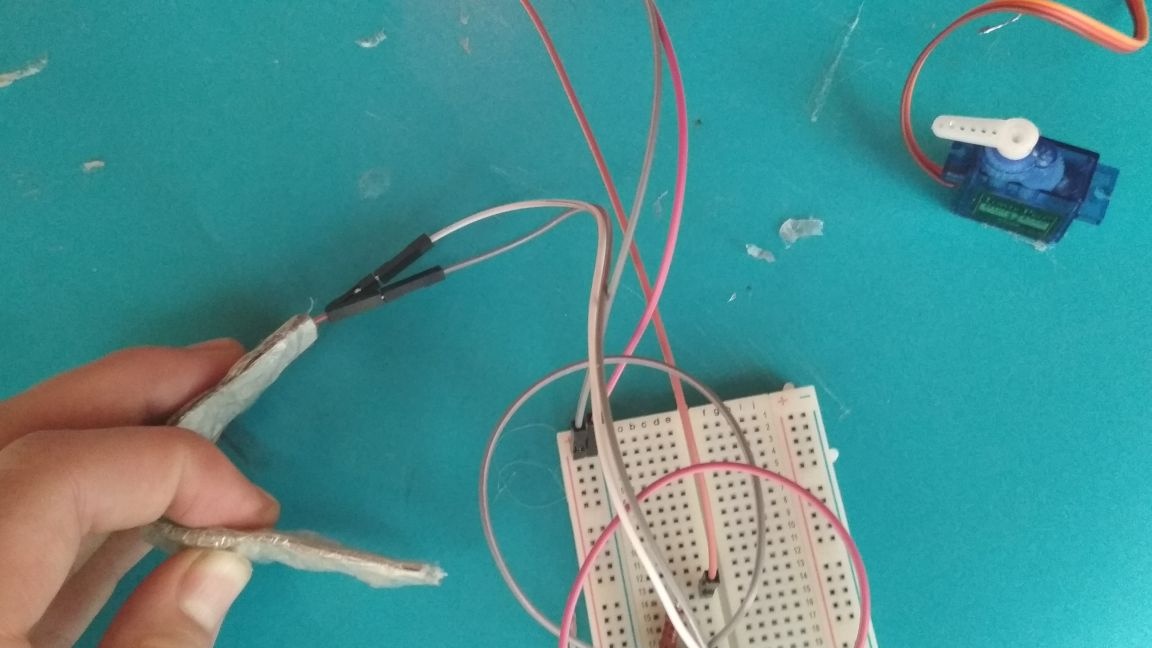
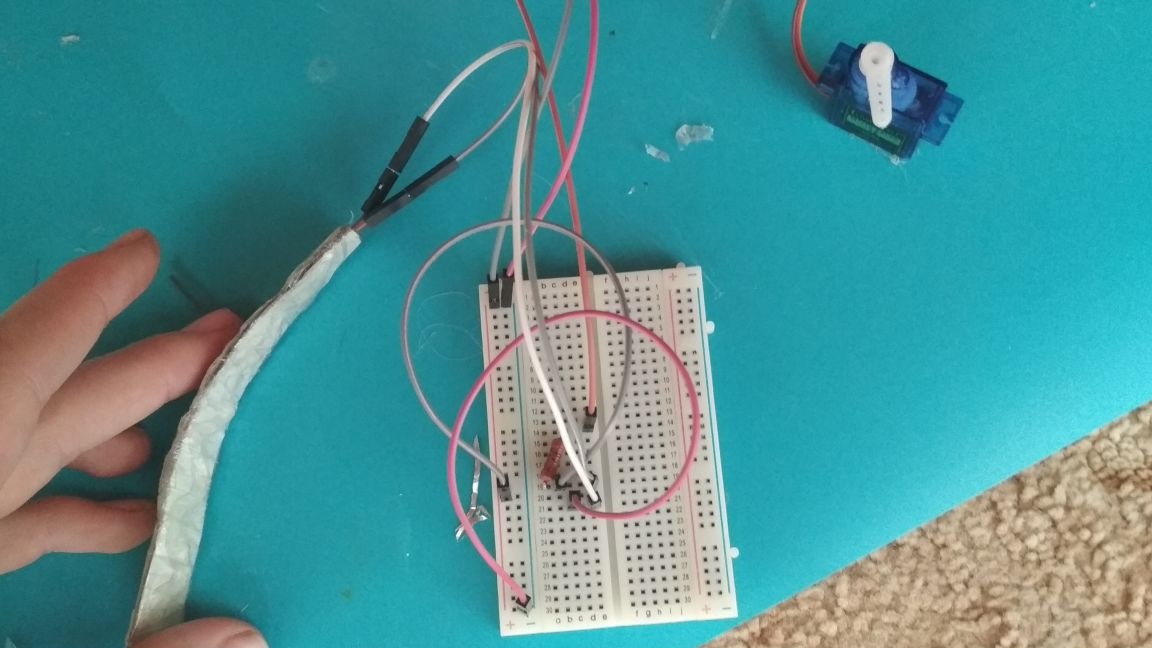
A nuestro sensor de curvatura, agregue dos cables de padre a padre

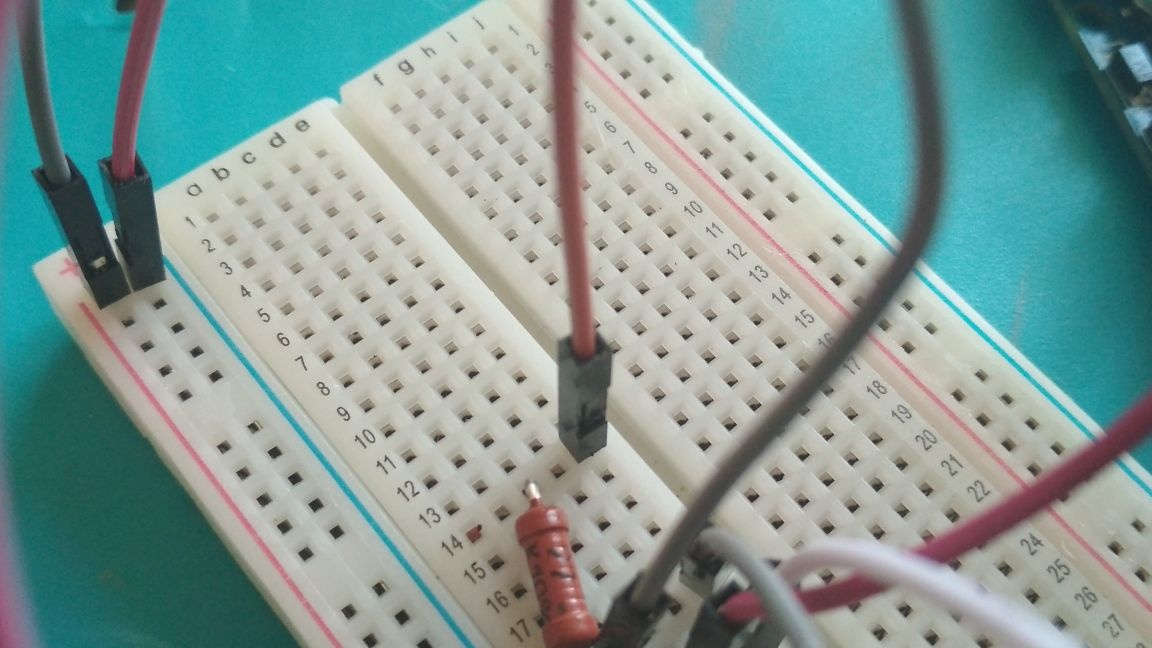
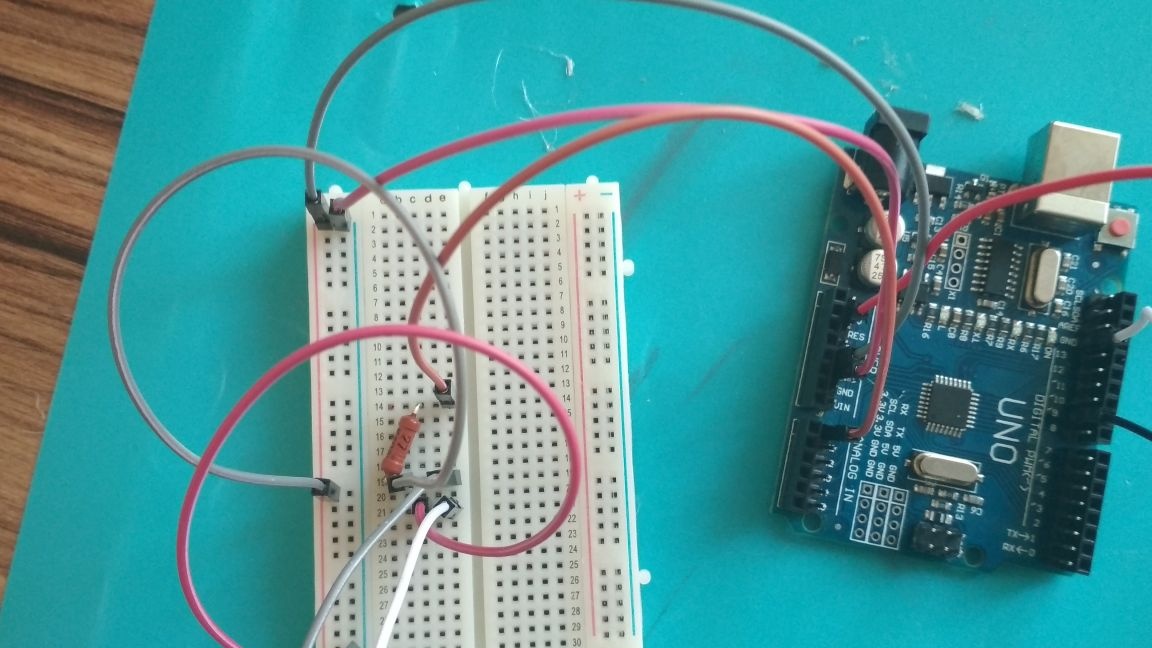
Conéctelos a la placa de pruebas:
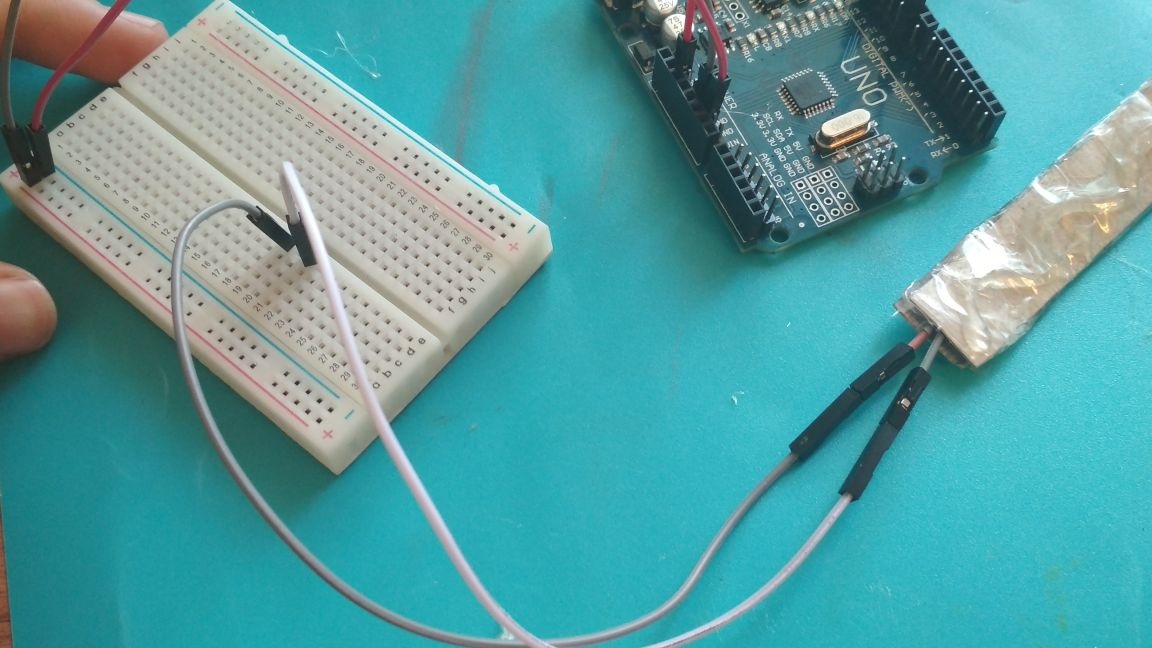
Uno de los extremos del sensor está conectado al plus de la placa a través de una resistencia de 22 kilo-ohmios (desafortunadamente lo mezclé y lo conecté a otra salida, pero esto no respondió a la operatividad), y el otro al menos:
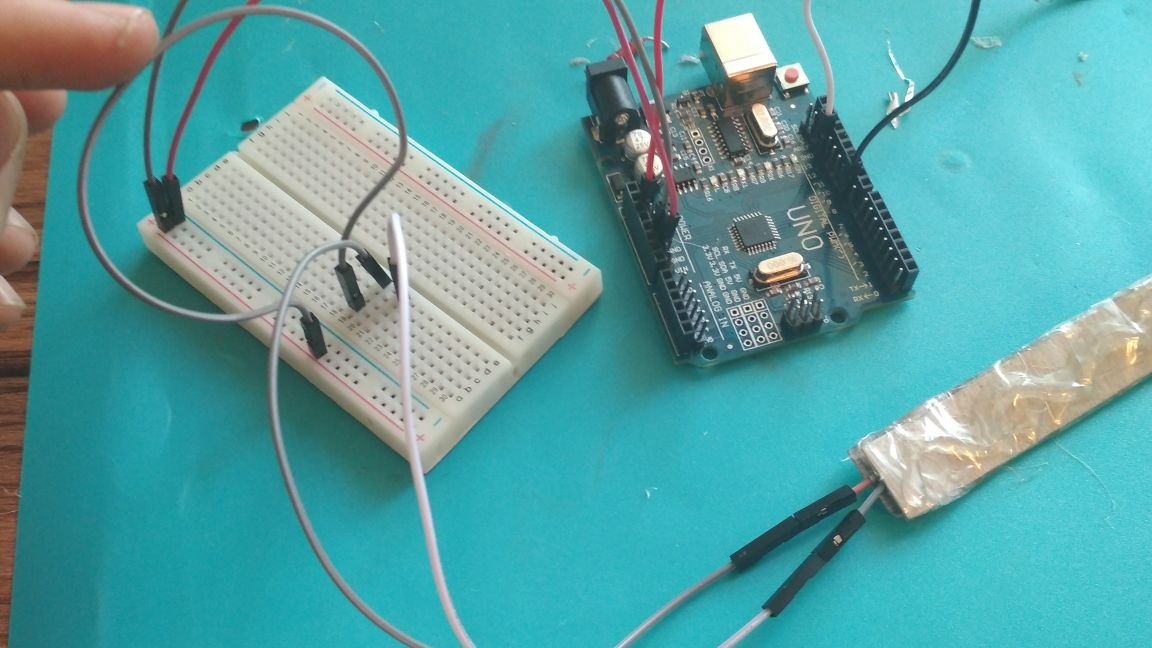
En la línea breadboarda en la que el extremo del sensor está conectado al plus, agregue otro cable y póngalo en la salida A0 en Arduino:
Ahora conectamos Arduino a la computadora, iniciamos el IDE de Arduino y cargamos el siguiente boceto:
#include
Servo servo1;
const int flexpin = 0;
configuración nula ()
{
Serial.begin (9600);
servo1.attach (9);
}
bucle vacío ()
{
int flexposición;
int servoposition;
flexposition = analogRead (flexpin);
servoposición = mapa (flexposición, 1018, 1023, 0, 90);
servoposición = restricción (servoposición, 0, 90);
servo1.write (servoposición);
Serial.print ("sensor:");
Serial.print (flexposición);
Serial.print ("servo:");
Serial.println (servoposición);
retraso (1000);
}Encienda el monitor de puerto al que está conectado Arduino y cargue el boceto

Ahora observamos los cambios que ocurren en el monitor de puerto cuando nuestro sensor se dobla, vemos que 1023 es 90 grados, y 1020 y 1019 son 0, así que en mi caso, cambio el número 1018 en el boceto a 1020, puede tener uno diferente. Ahora 1020 es 0 grados y 1023 es 90 grados. Después de todos los cambios, cargue el nuevo boceto personalizado en la placa Arduino


Bueno, eso es todo! ¡Nuestro sensor de doblado más simple y más importante barato está listo!
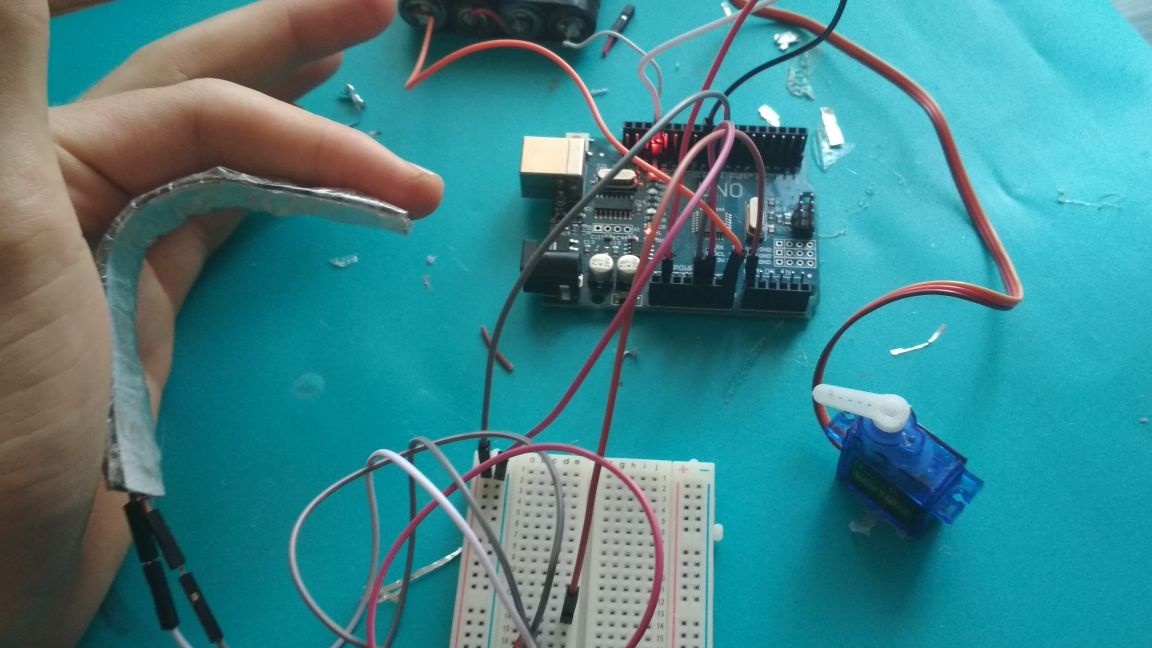
Si todo se hace correctamente, cuando el sensor está doblado, el servoaccionamiento girará 90 grados y, cuando se extienda, volverá a su posición original. Por supuesto, la precisión de este sensor es inferior al adquirido, pero es adecuado para proyectos que no son particularmente confusos, y además, si todo se hace con cuidado y afinado, resultará casi como comprado. Espero que este artículo sea útil para alguien.
¡Gracias a todos por su atención!