
Hola a todos los amantes de la electrónica. En este artículo te diré cómo hacer un robot de motor de búsqueda que recorra una línea negra, que puedes dibujar a tu gusto. Estoy seguro de que este kit de kit será un juguete muy interesante para quienes lo recogerán.
No voy a tirar por mucho tiempo, iremos directamente a la fabricación.
Antes de leer el artículo, propongo ver un video con un procesador de ensamblaje detallado para este kit, así como sus comprobaciones de rendimiento.
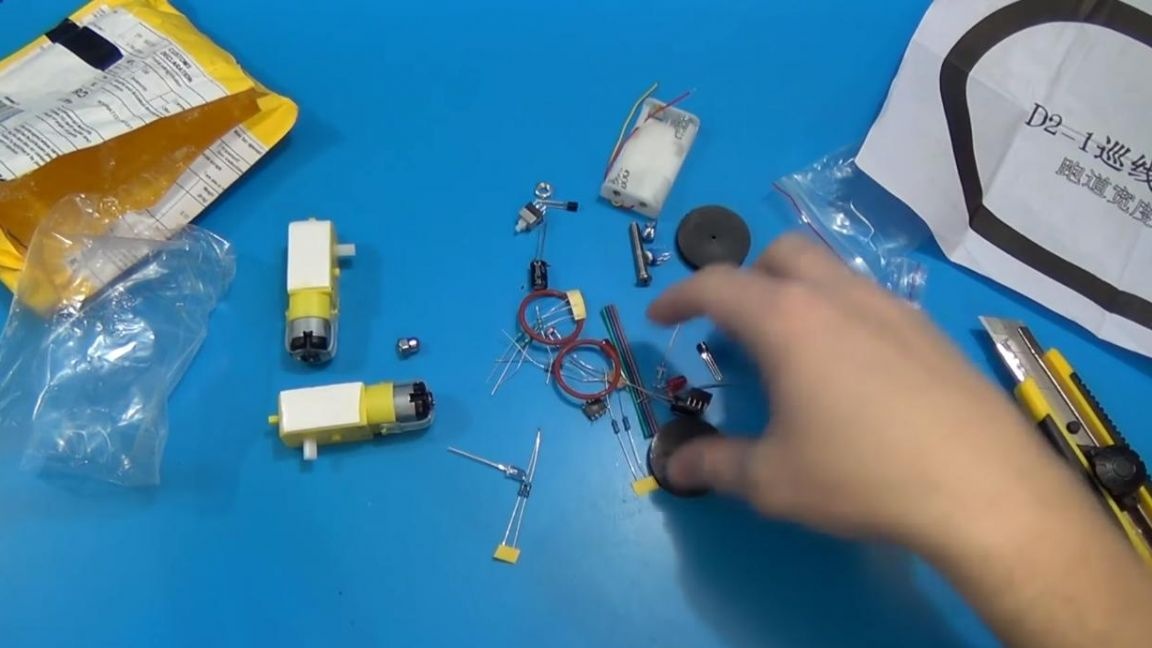
Para hacer un robot de motor de búsqueda que viajará a lo largo de la línea negra hazlo tu mismonecesitarás:
* Kit
* Soldador, soldadura, fundente
* Cortadores laterales
* Multímetro
* Accesorio para soldar "tercera mano"
* Alicates
* Destornillador Phillips
Primer paso
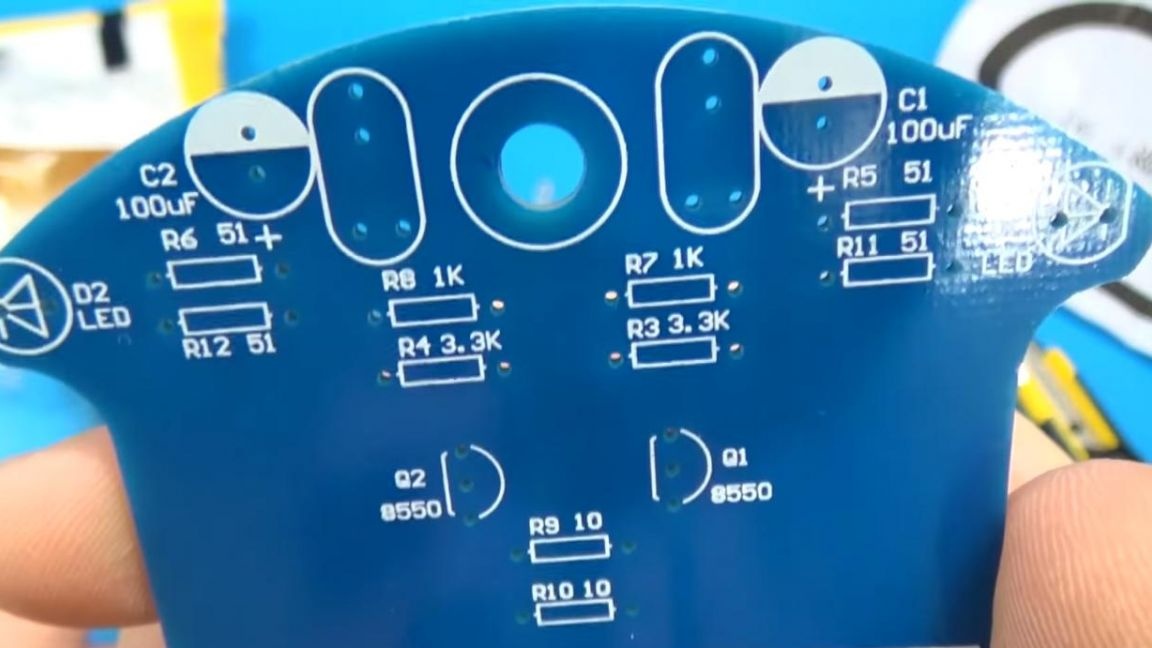
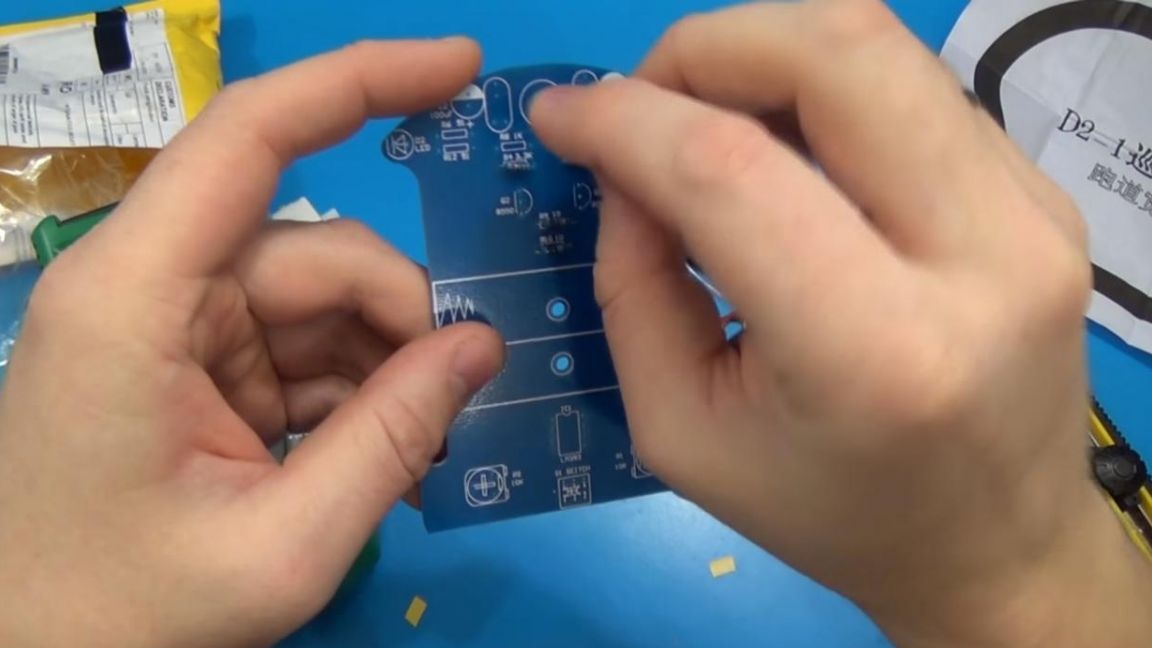
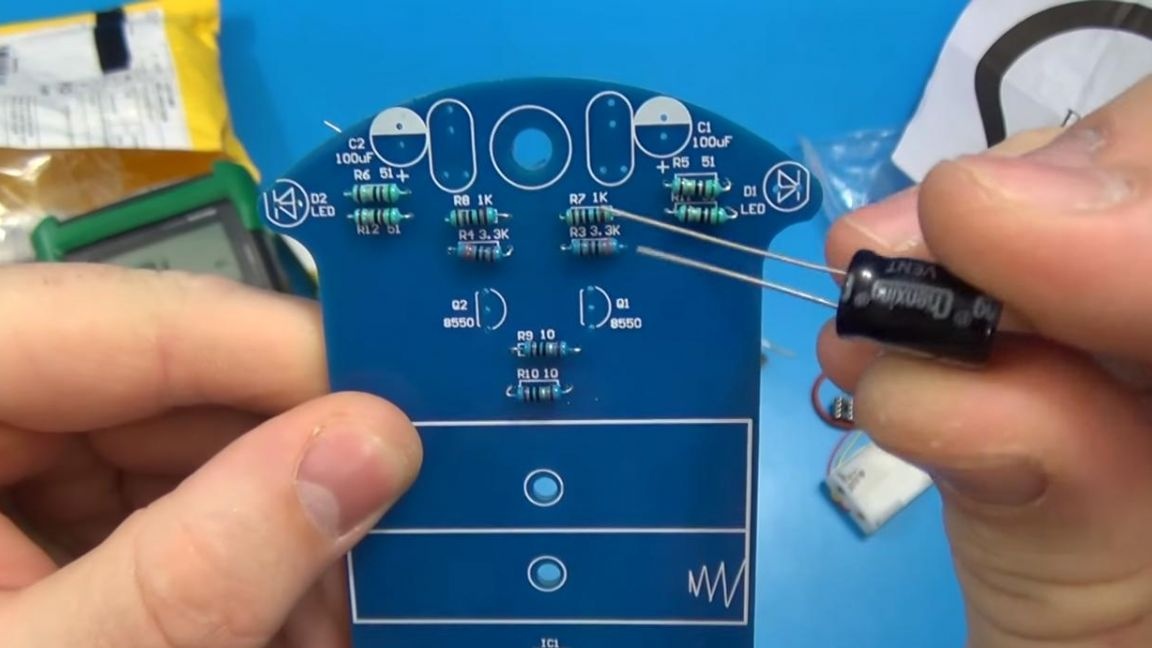
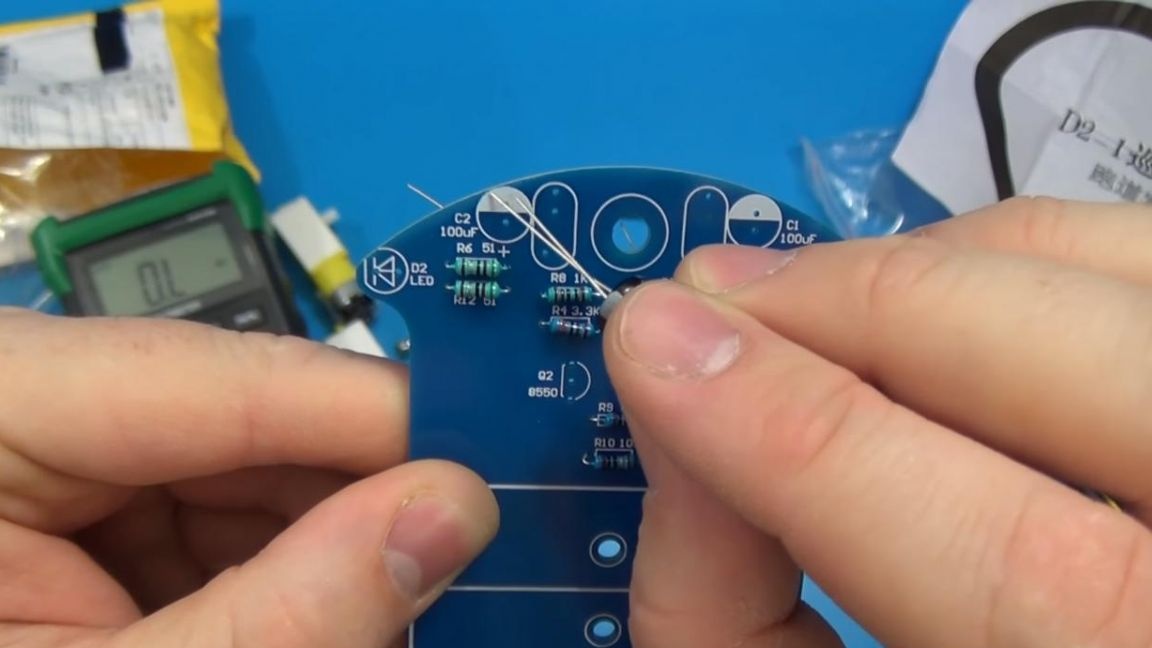
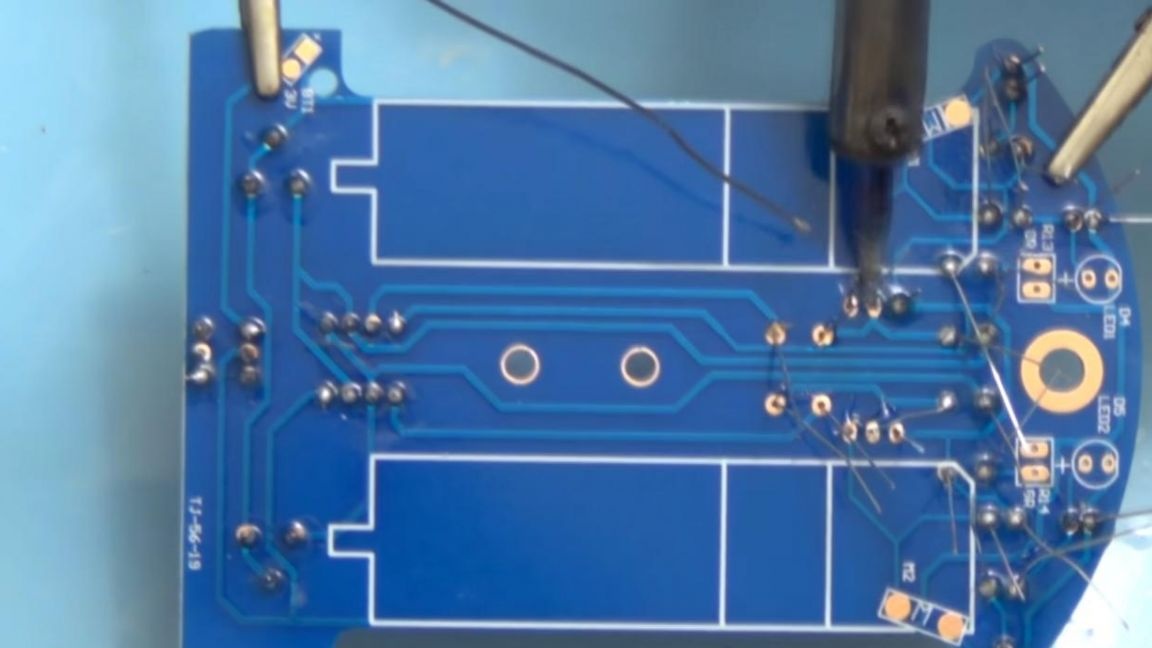
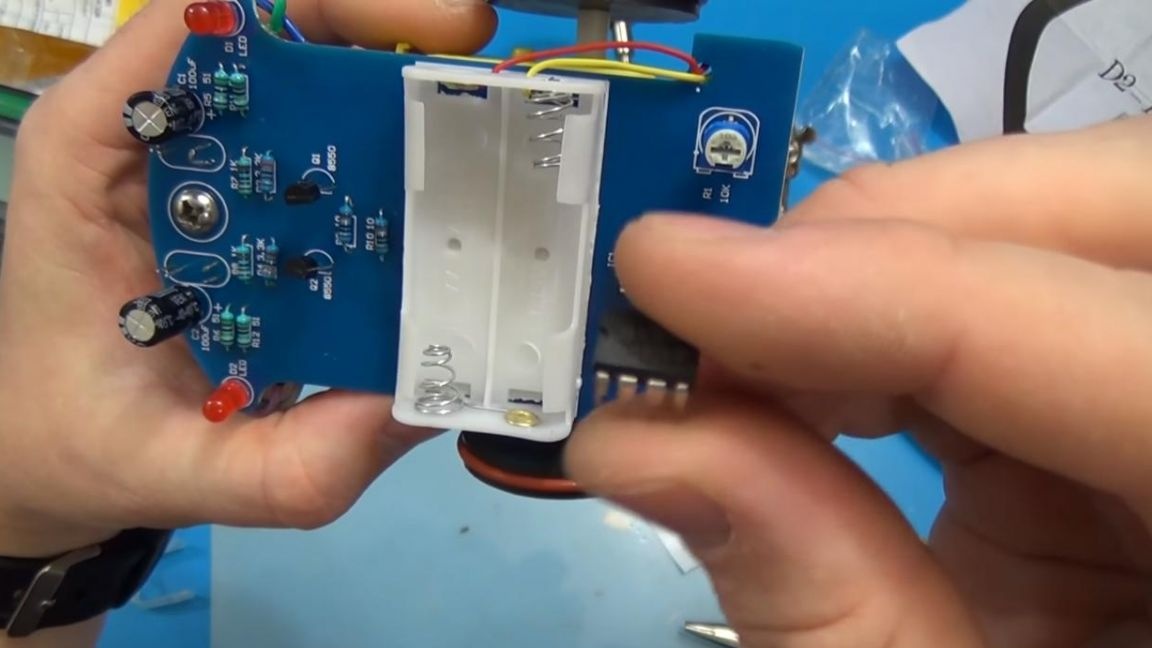
En primer lugar, debe colocar todos los componentes en la placa, el kit incluye resistencias, condensadores y transistores.
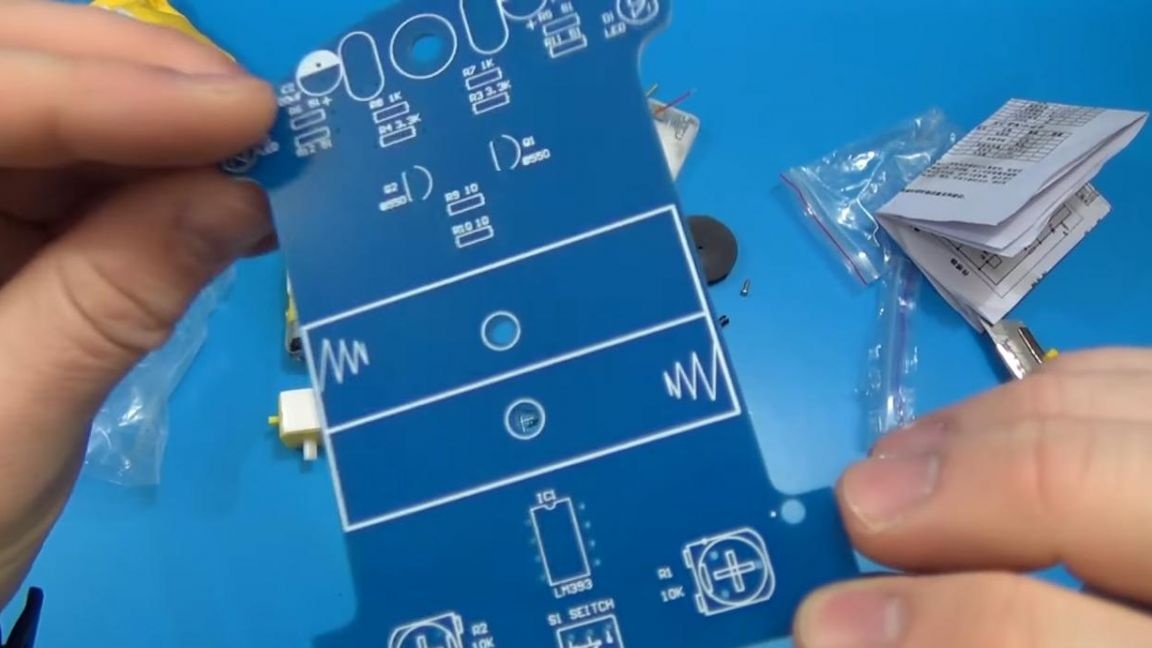
Primero debe instalar las resistencias en sus lugares, cuyo valor nominal se indica en la placa, mientras que las resistencias están codificadas por colores, por lo que puede determinar la resistencia de una sola resistencia. Además, la resistencia se puede medir con un multímetro, este método será más rápido, pero esto no significa que sea obligatorio. Organizamos las resistencias en la placa de acuerdo con su valor nominal, doblamos ligeramente los terminales en el reverso, esto se hace para que no se caigan al soldar.

Paso dos
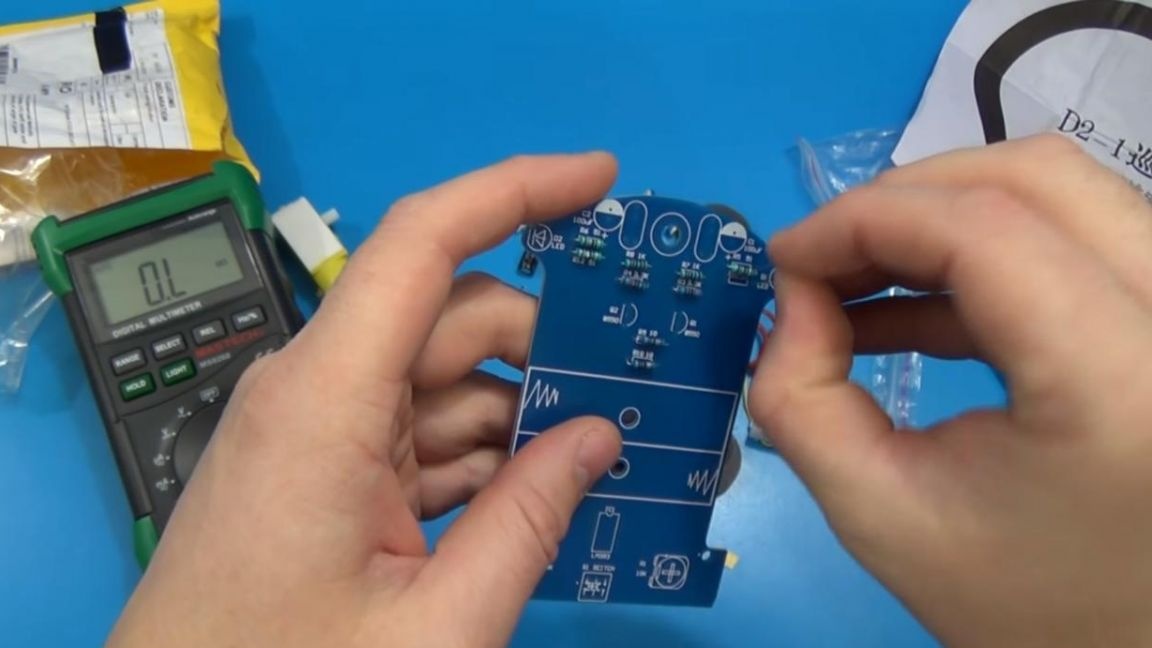
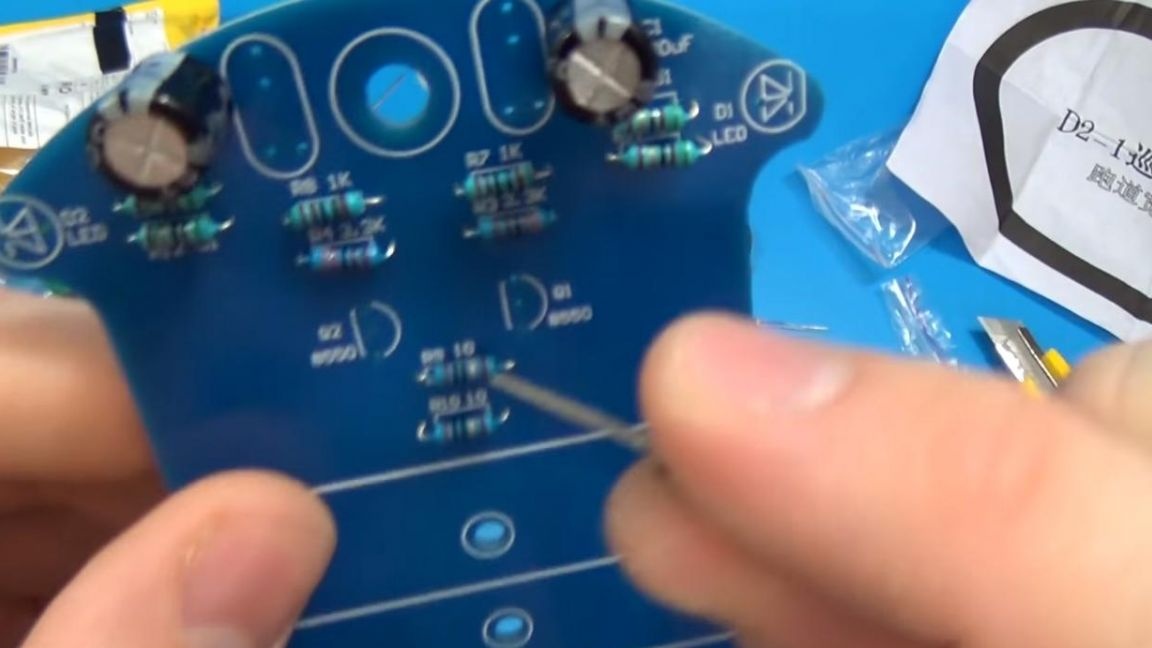
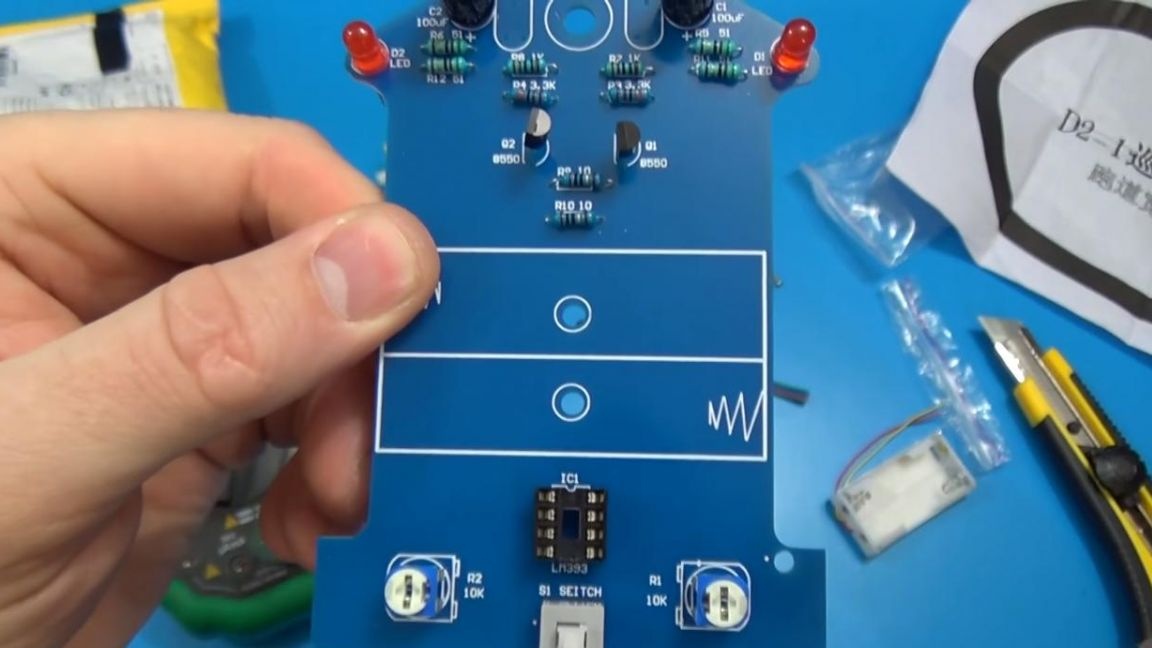
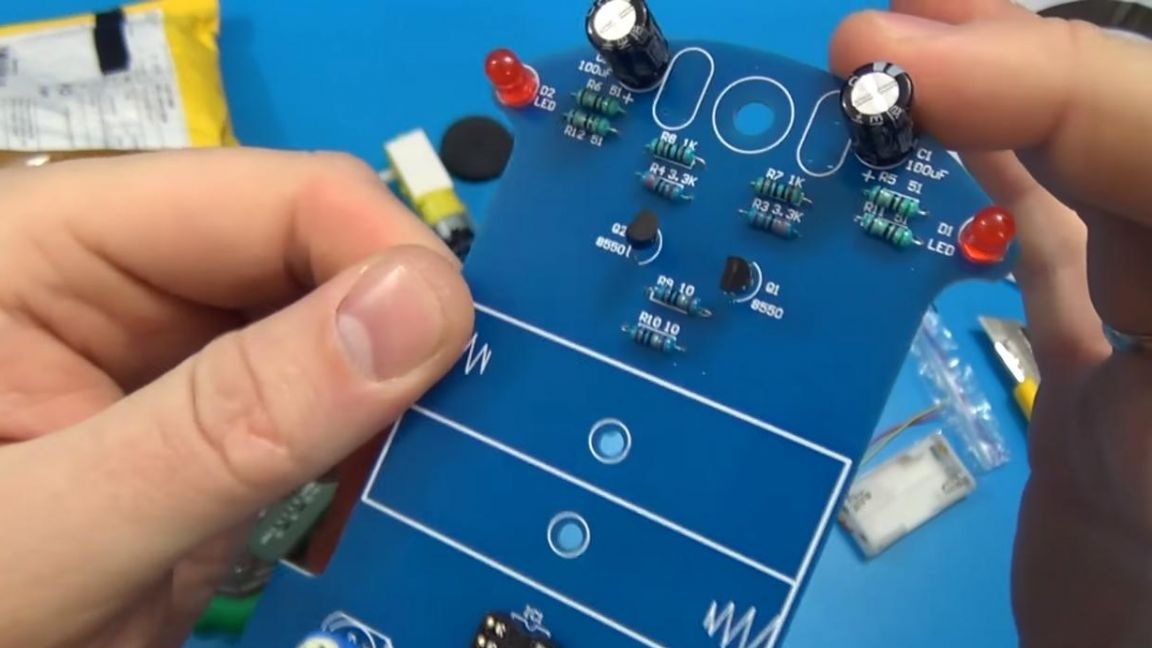
Las resistencias están todas en su lugar, seguidas por los condensadores, a diferencia de los componentes anteriores, estos tienen polaridad. El signo negativo del condensador se indica en su caja con una tira blanca con un guión; en el tablero, el signo negativo se indica con un semicírculo blanco lleno.
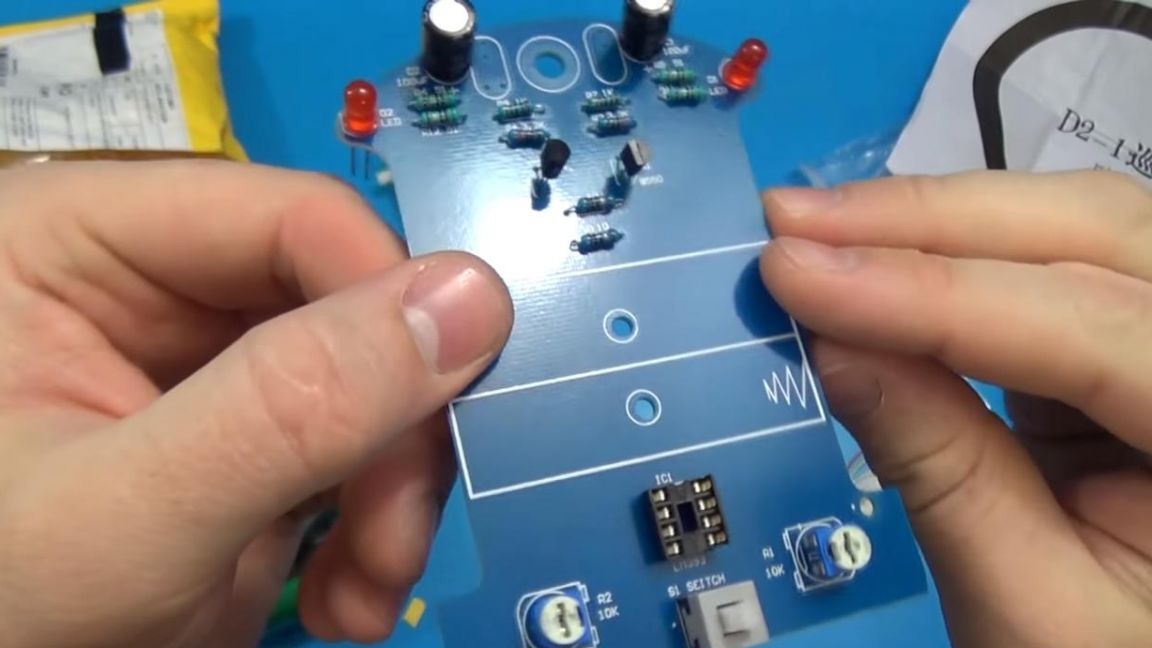
Cuando los condensadores están en su lugar, recurrimos a los transistores, son los mismos para nosotros, por lo que no podemos mezclarnos entre nosotros. Para colocarlos correctamente en el tablero, debe combinar la parte plana del transistor con un tablero en el tablero.
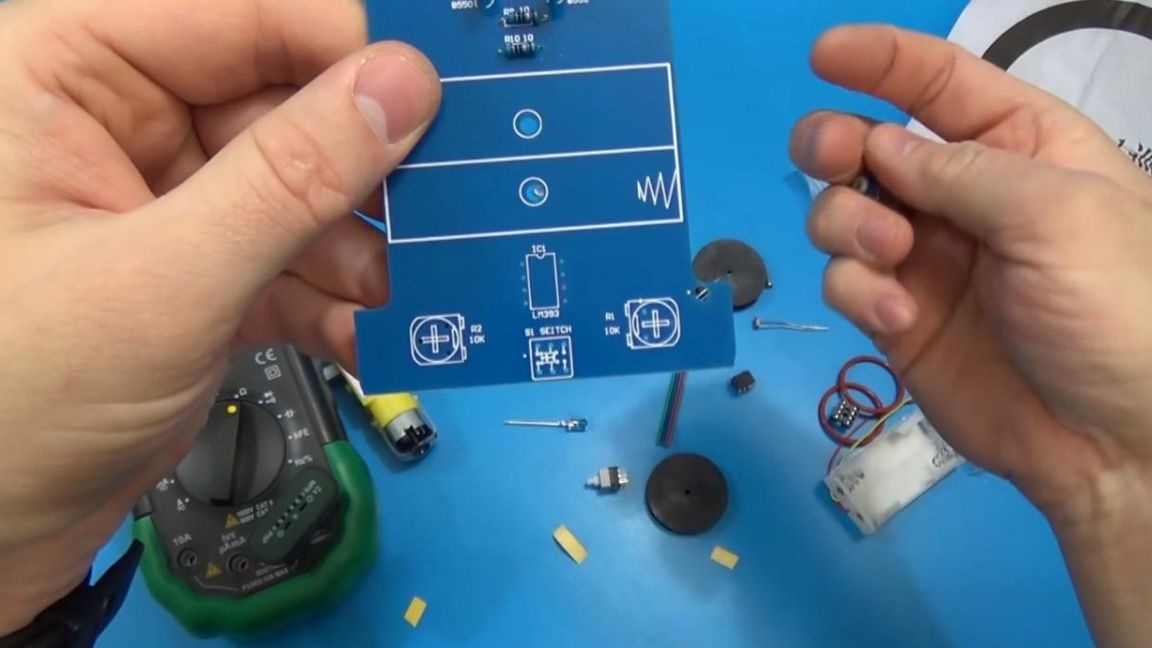
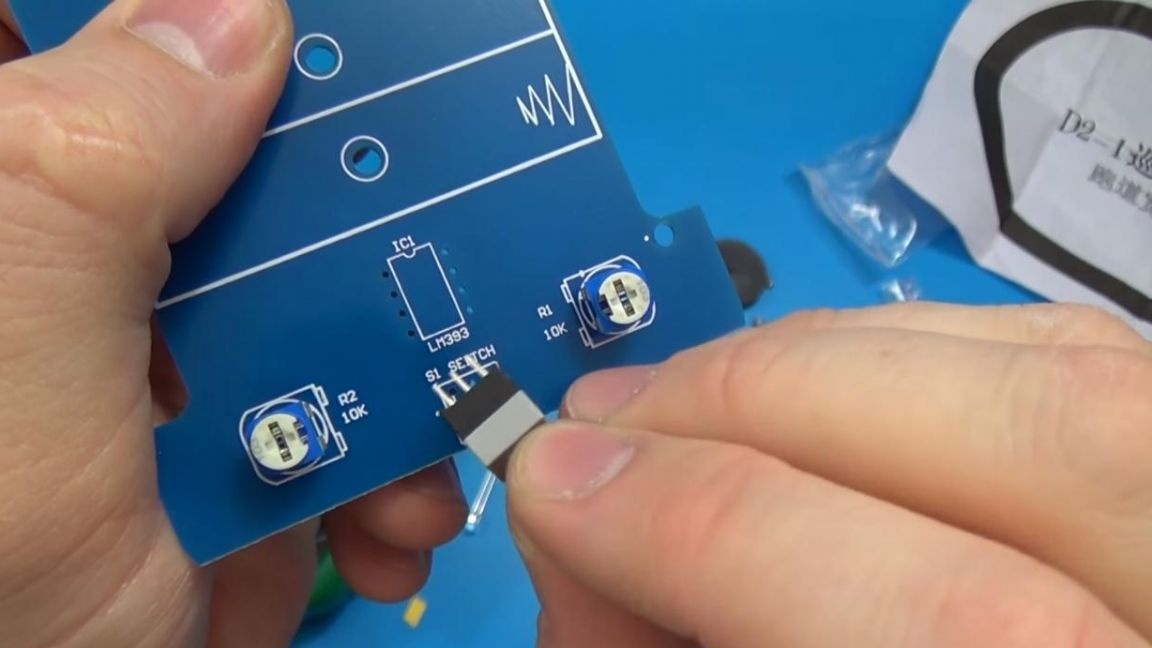
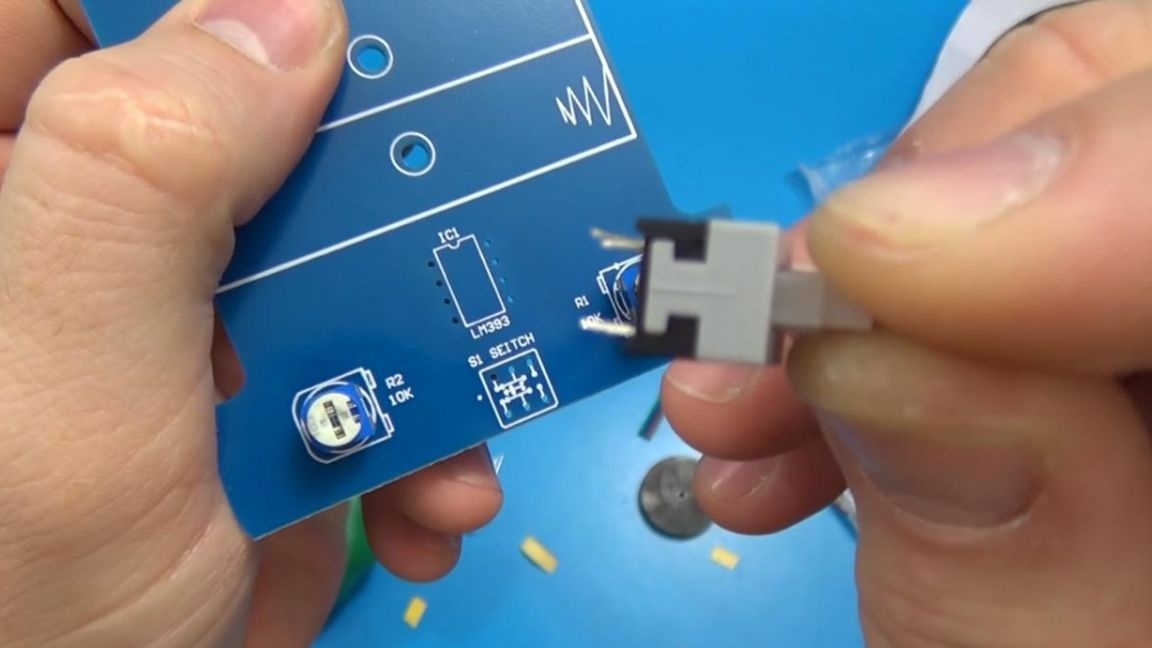
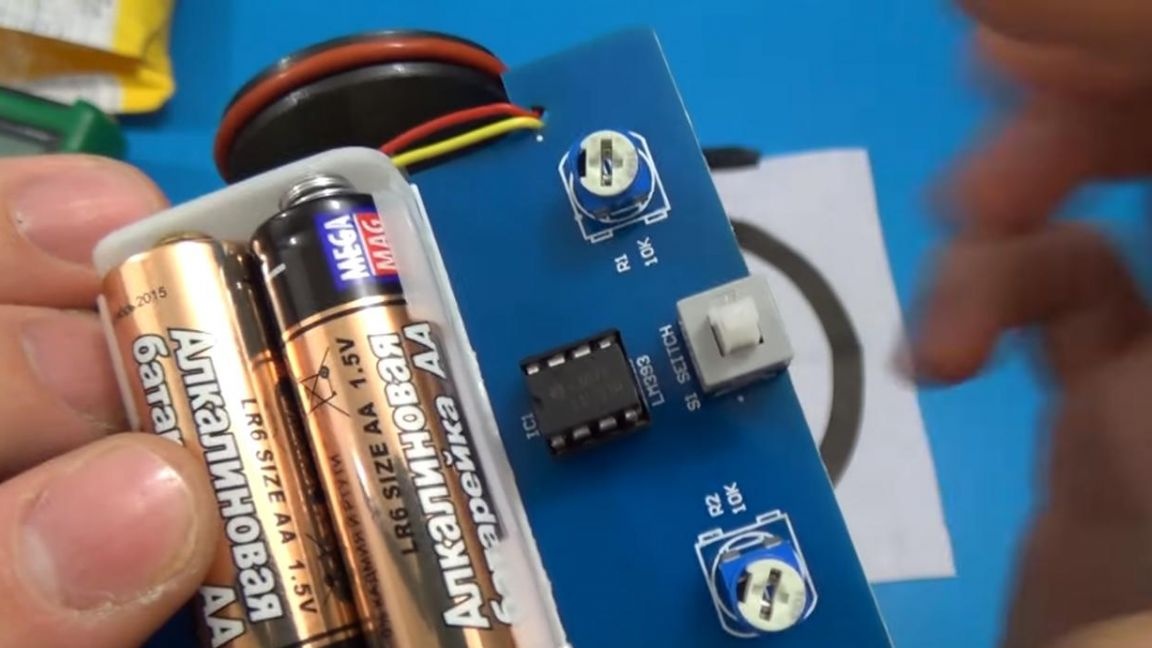
Luego instalamos dos resistencias de sintonización, en relación con la ubicación de los terminales, no funcionará colocarlos incorrectamente, lo cual es bueno. También colocamos el botón de encendido, está encendido y apagado, es decir, puede estar en la posición de encendido o apagado, su ubicación correcta corresponde a la coincidencia de la posición de la tira en el botón con un punto en el tablero.
Paso tres
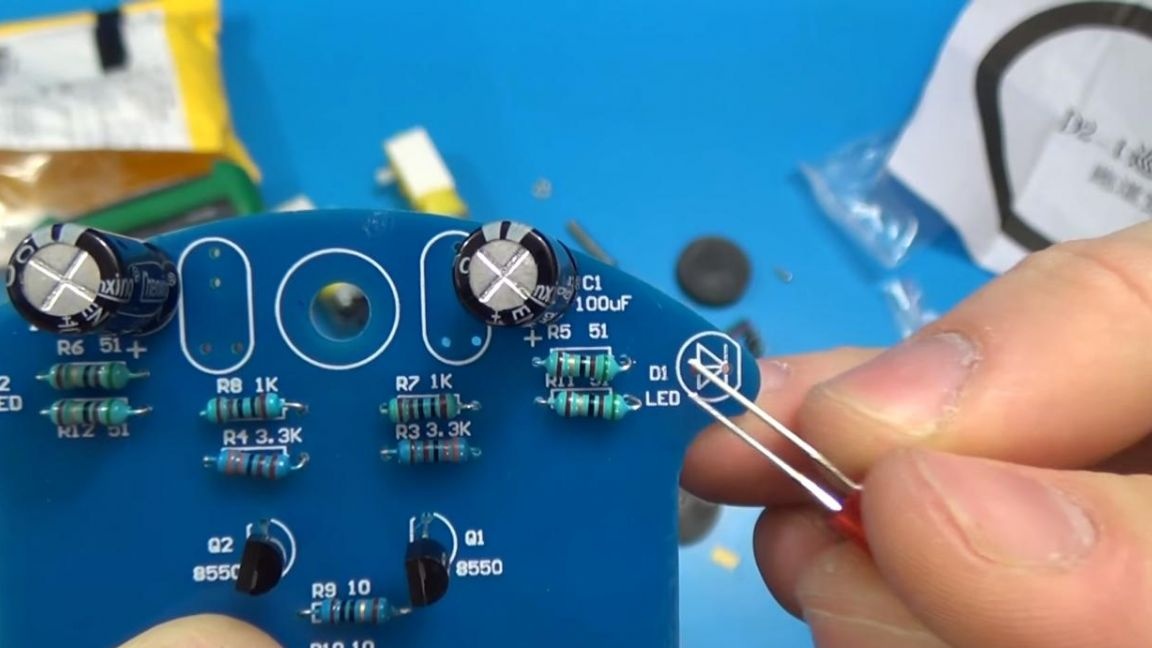
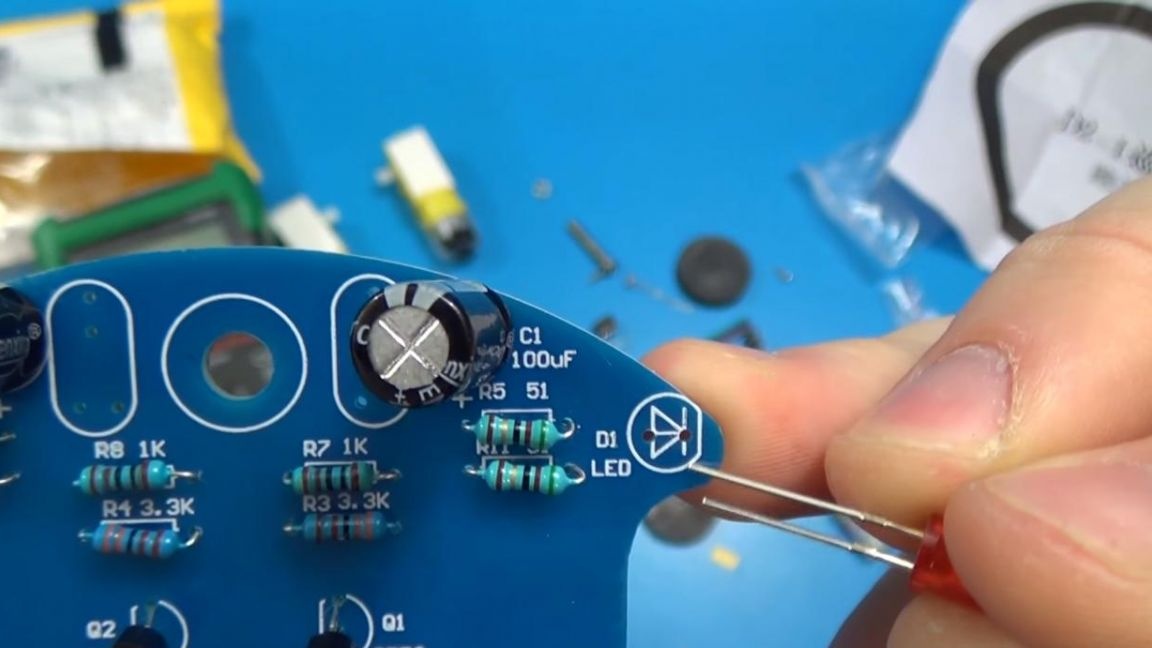
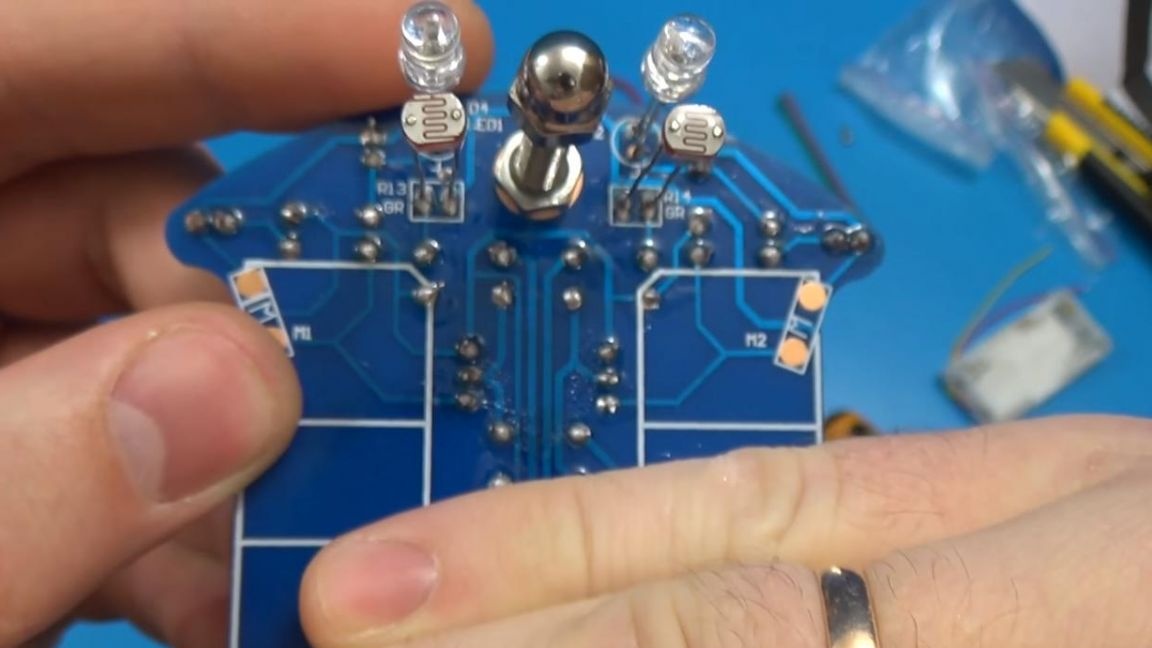
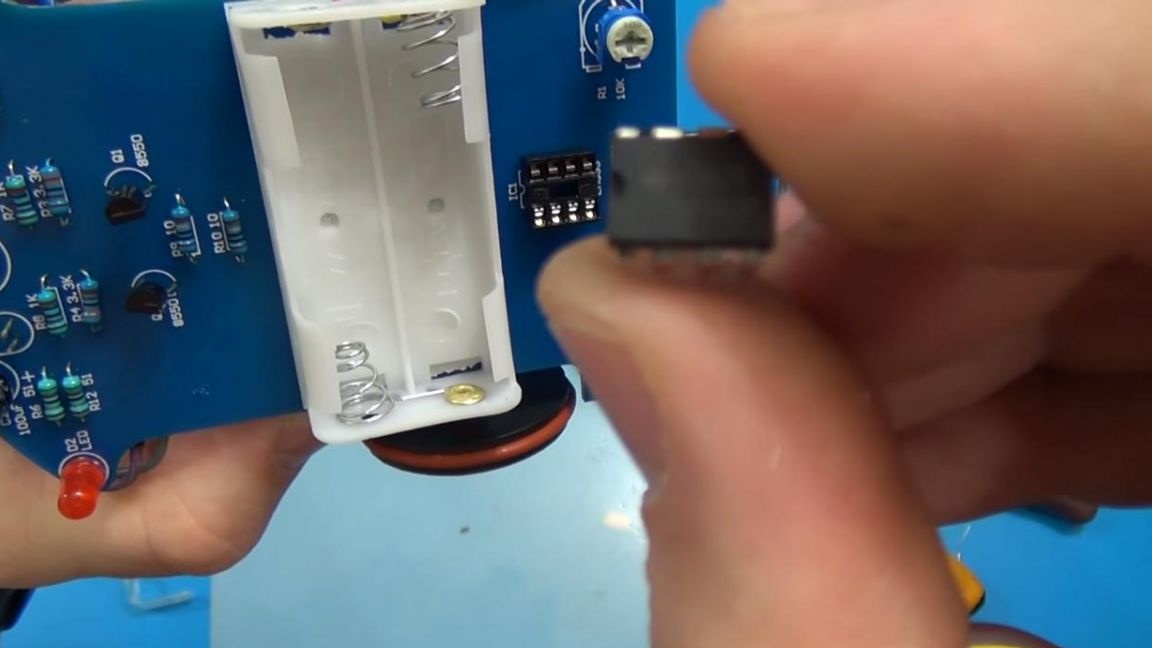
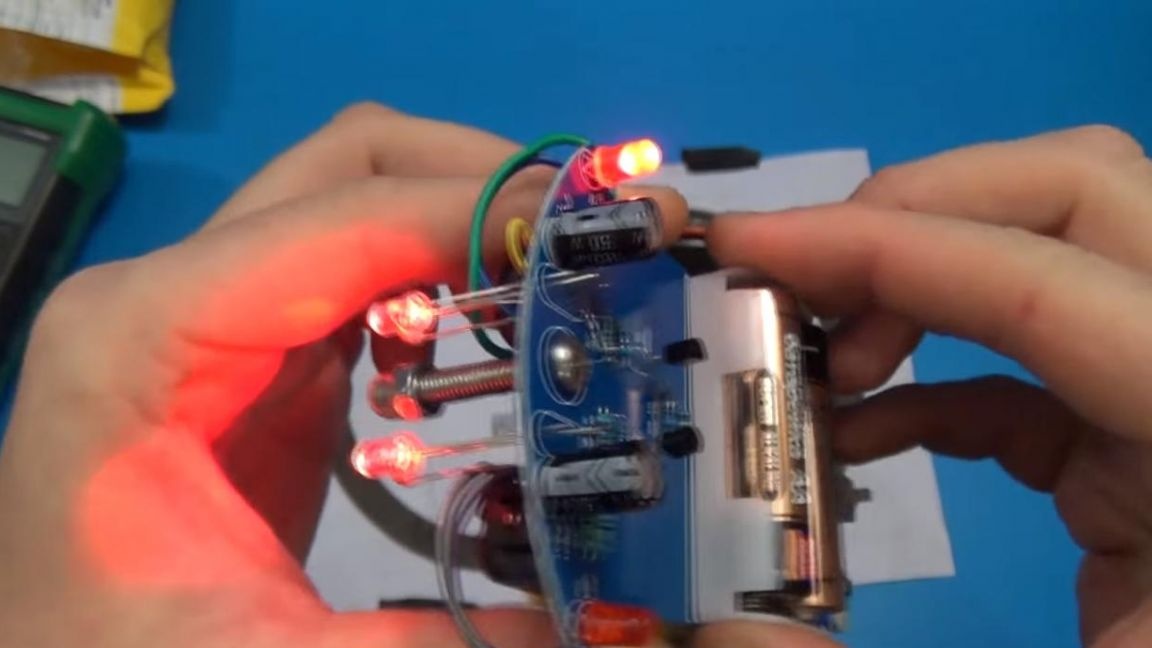
Es hora de lidiar con los LED, hay cuatro de ellos en el kit, dos rojos y dos blancos. En el tablero, el signo más se indica con un triángulo, en el LED es una salida larga, con un signo negativo, todo está claro. Colocamos los LED rojos en la parte superior, son análogos de las "señales de giro".Hay un lugar separado para el microcircuito, insertamos el conector allí, por lo que reemplazarlo en ese caso será mucho más fácil, pero los contactos no se sobrecalentarán al soldar.

Paso cuatro
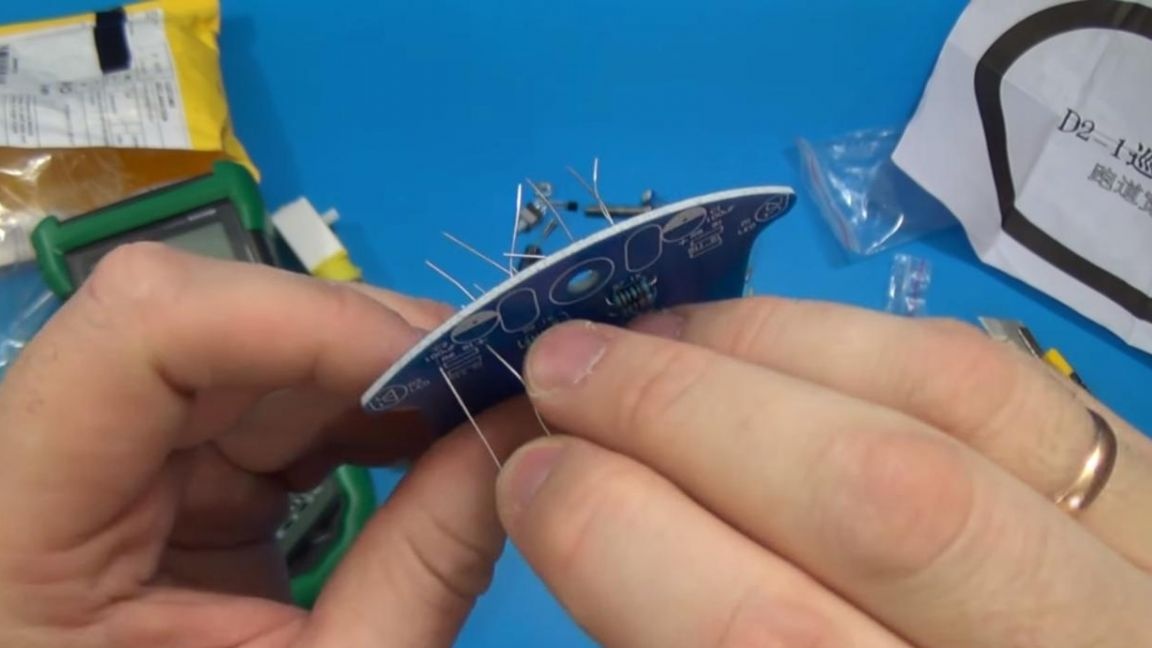
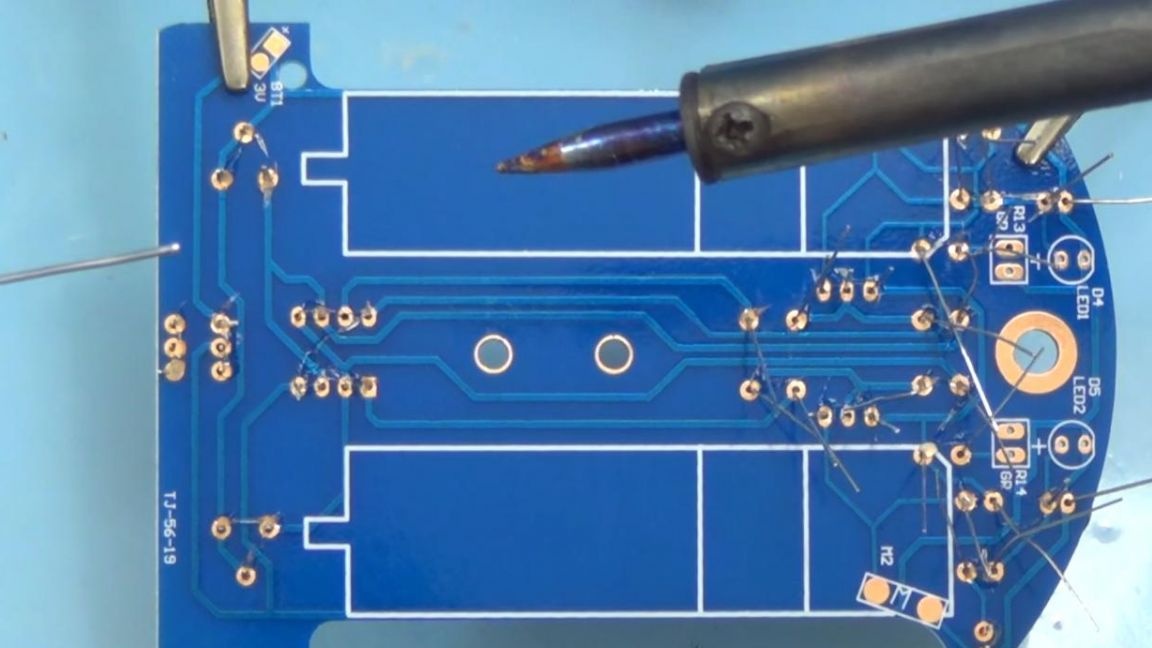
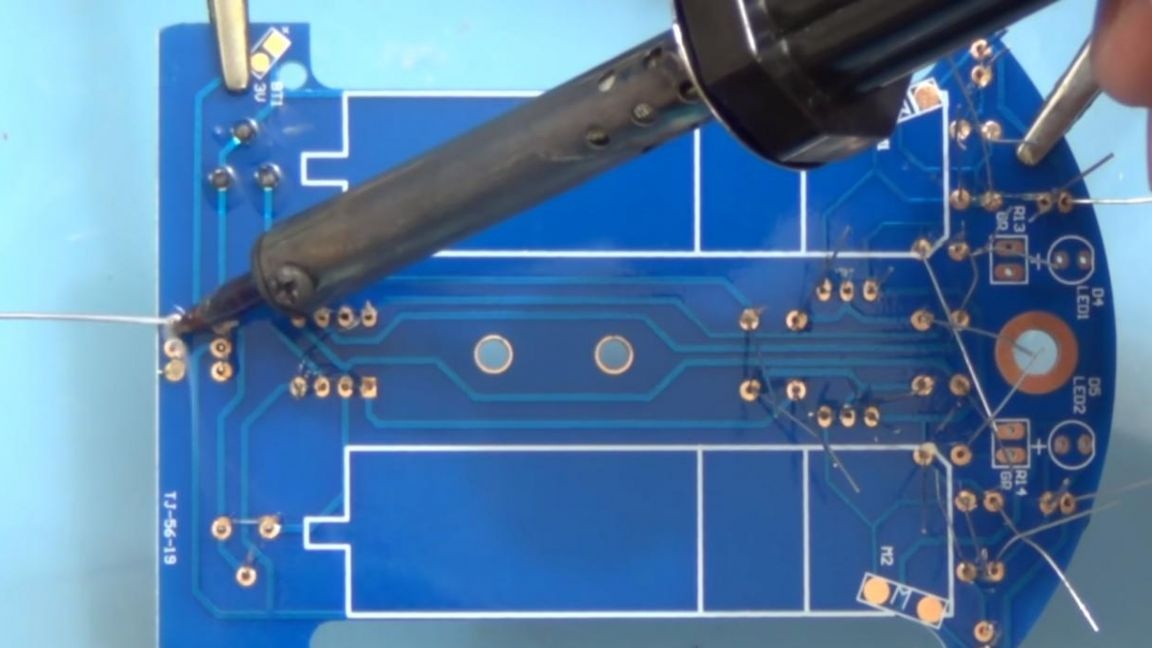
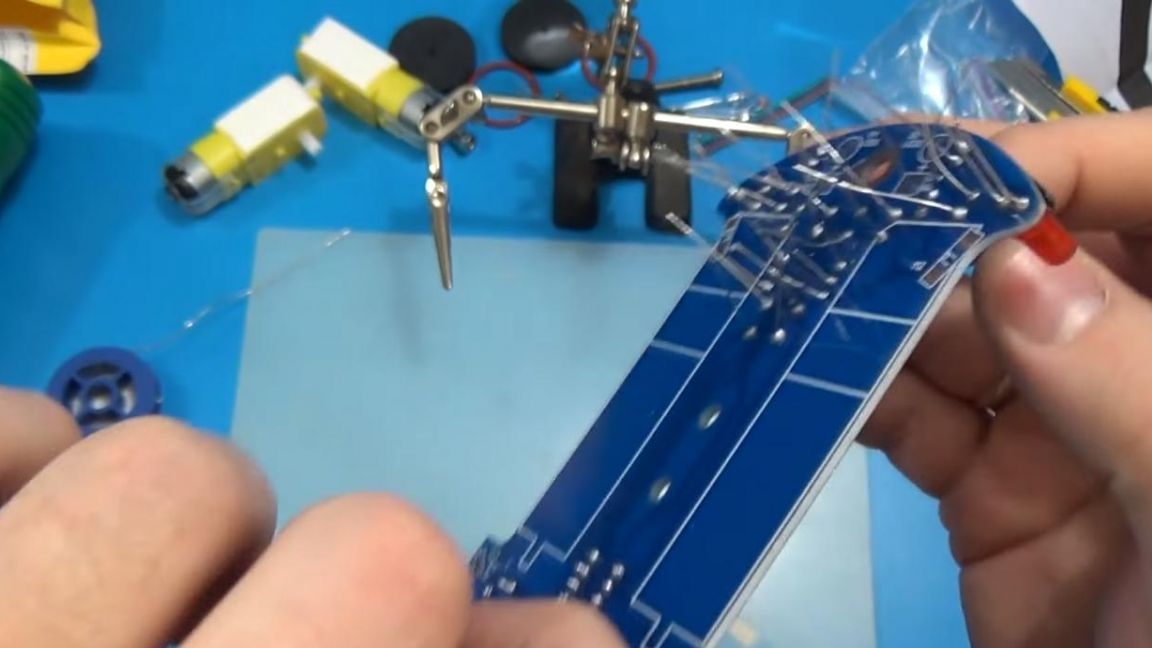
Es hora de soldar los componentes colocados en la placa, fijarlo en el dispositivo de soldadura de tercera mano, aplicar fundente y soldadura, alimentando ligeramente la soldadura.
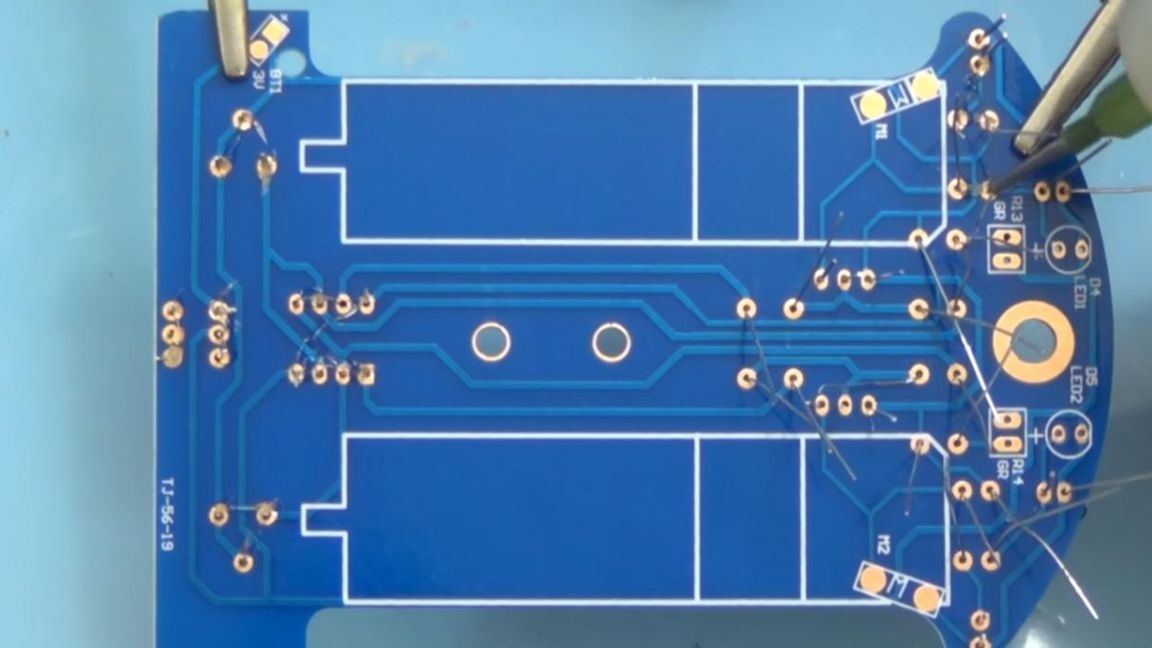
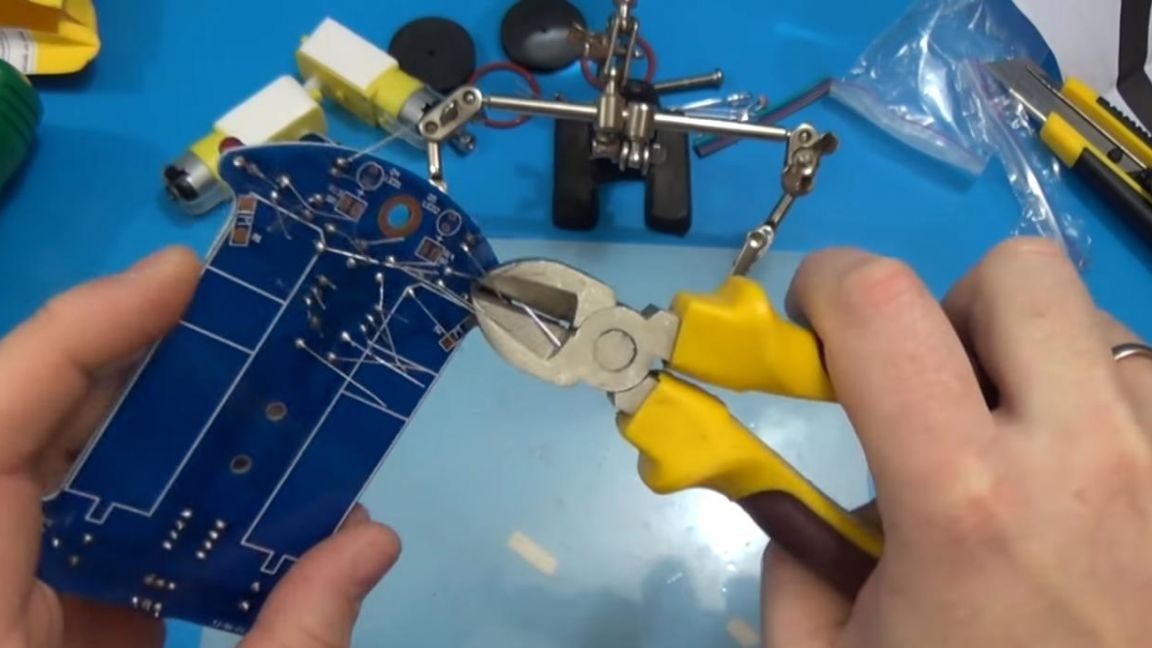
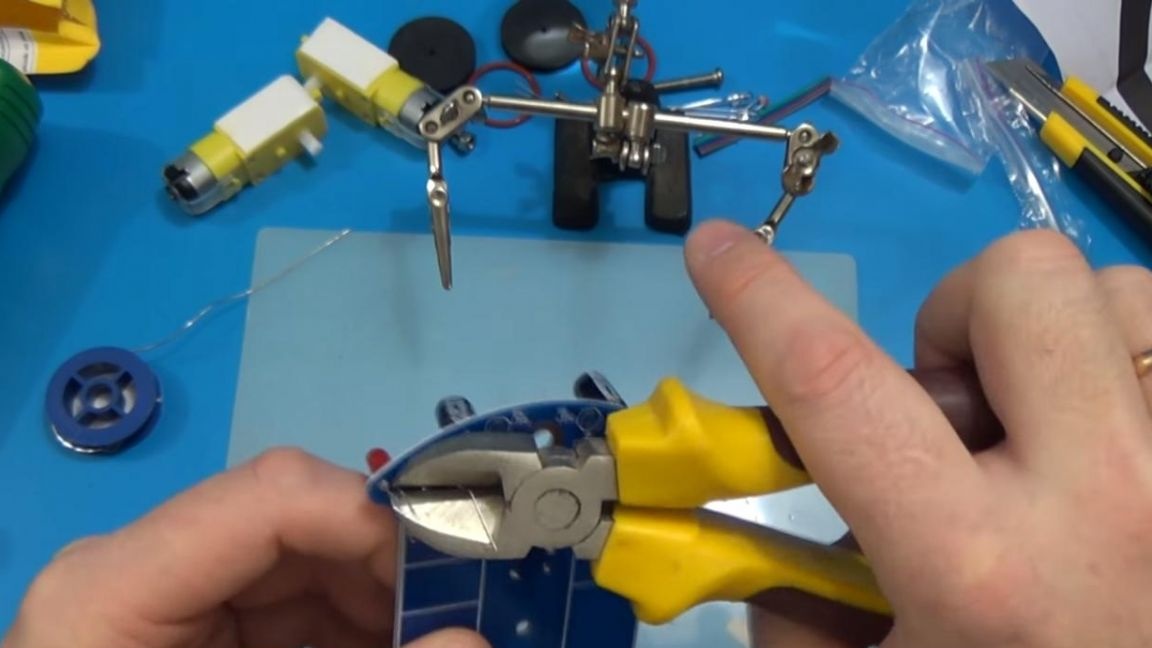
Después de soldar, eliminamos los restos de las conclusiones con la ayuda de cortadores laterales, pero tenga cuidado con esto, ya que arrancar las almohadillas de contacto, así como las pistas en sí, es más fácil en esta etapa.
Paso cinco
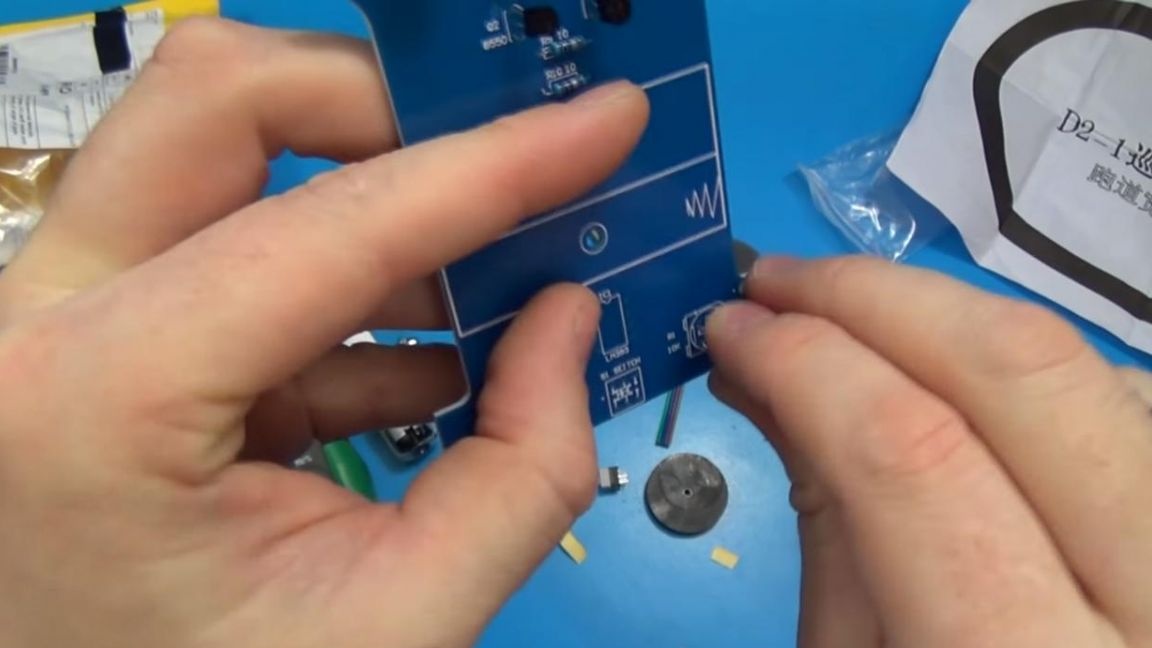
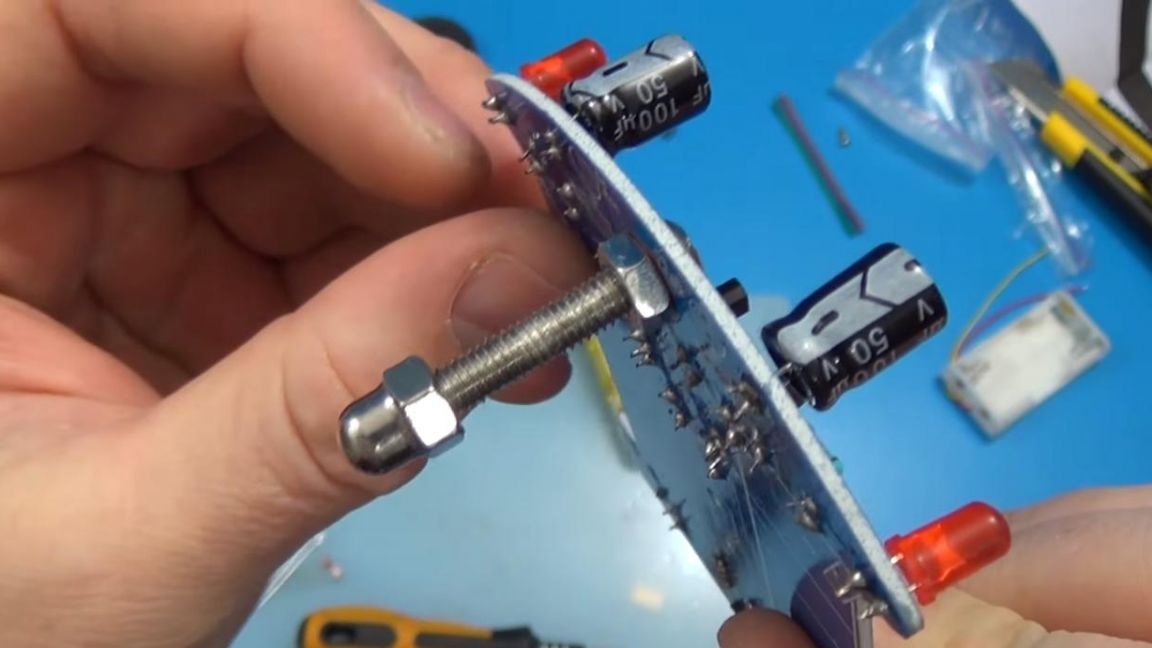
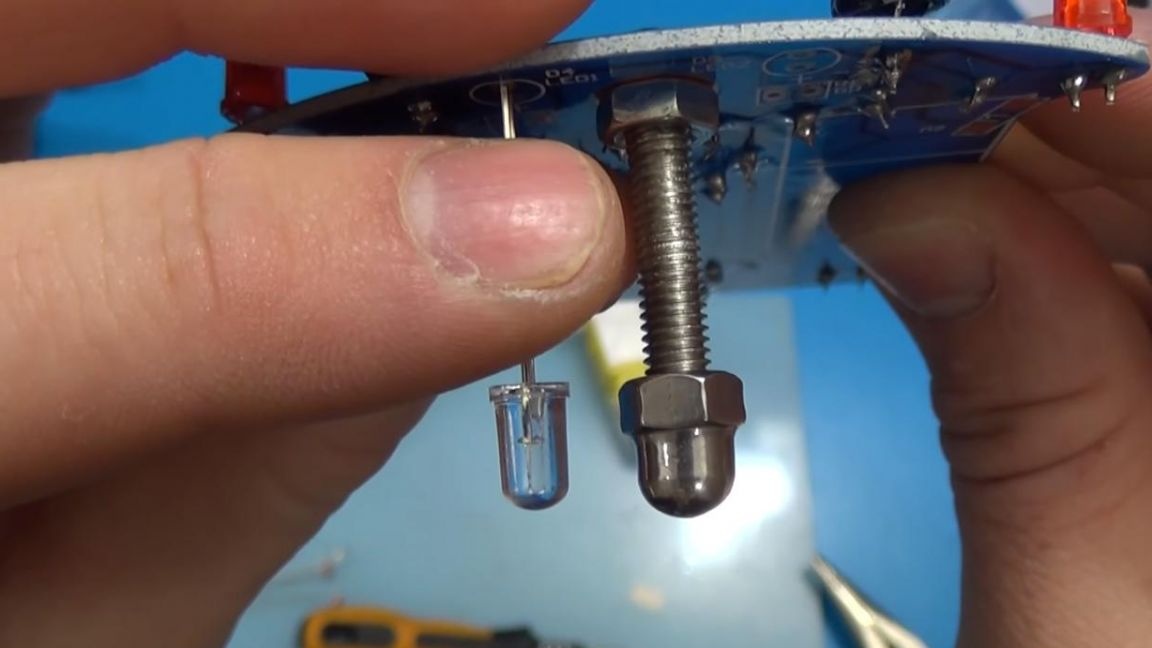
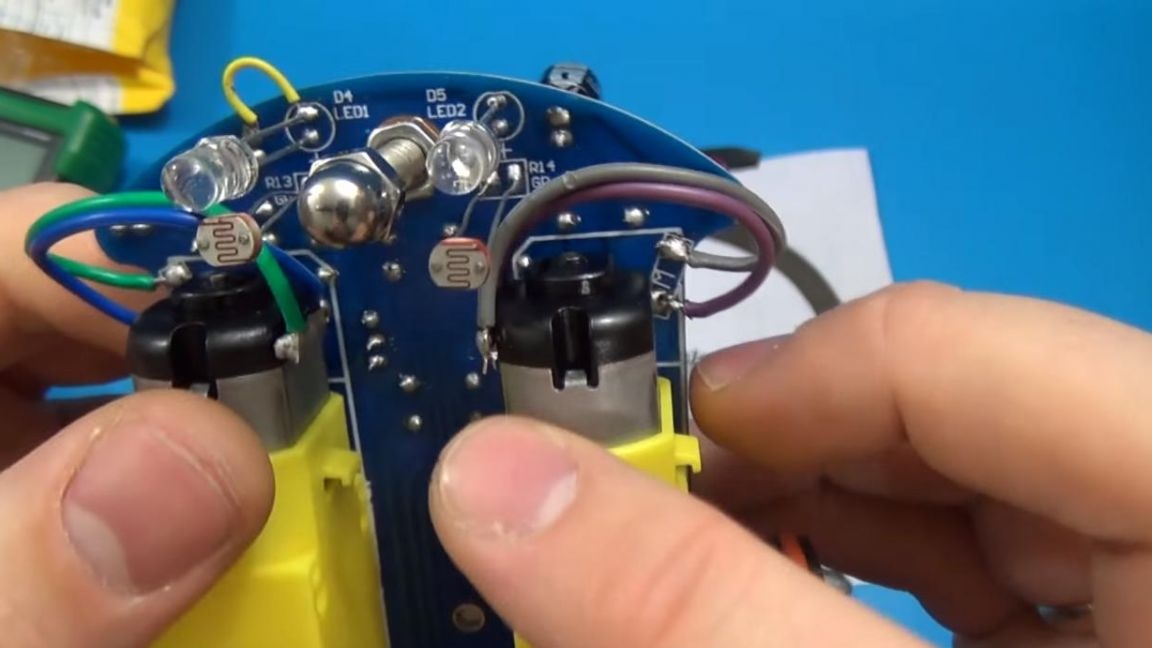
Ahora fijamos el tornillo a la placa e instalamos LED blancos al lado, su distancia debe ser de 1-2 mm menos que la extensión del tornillo, esto se puede ver claramente en la foto, si esto no se observa, entonces los fotoresistores funcionarán peor o no funcionarán en absoluto .

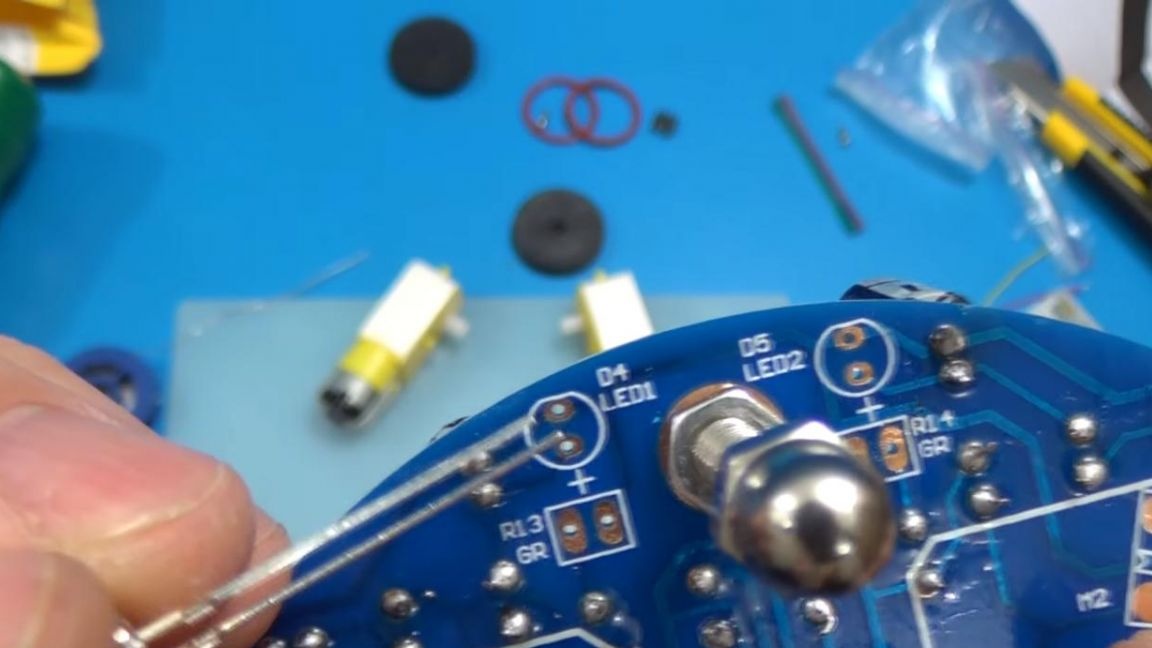
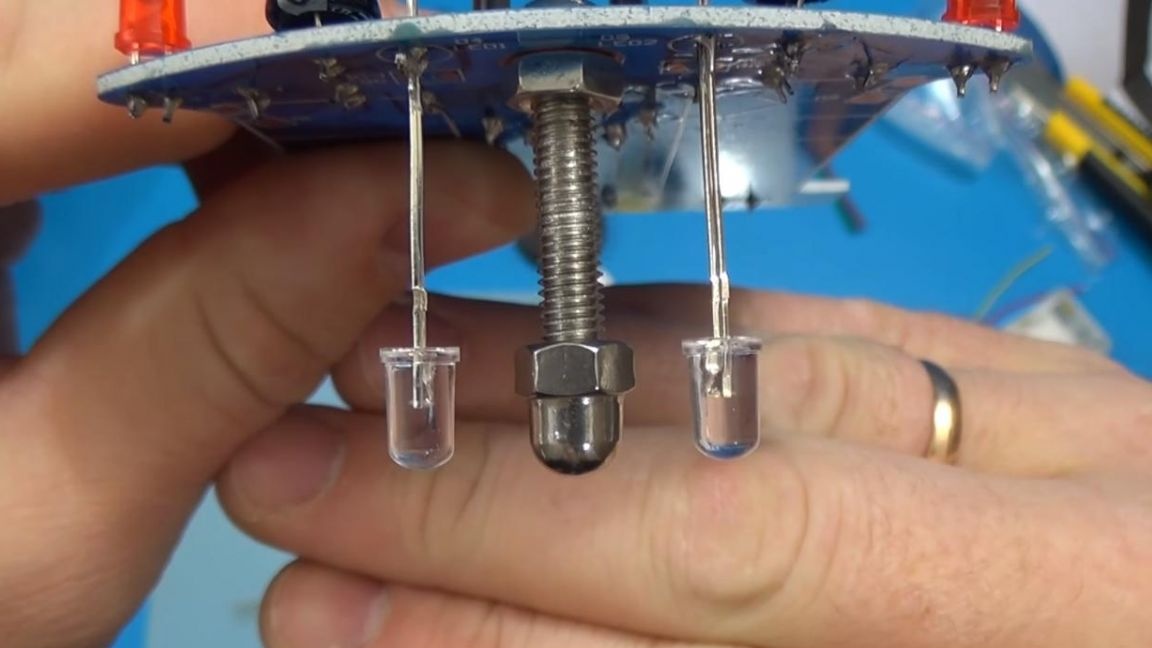
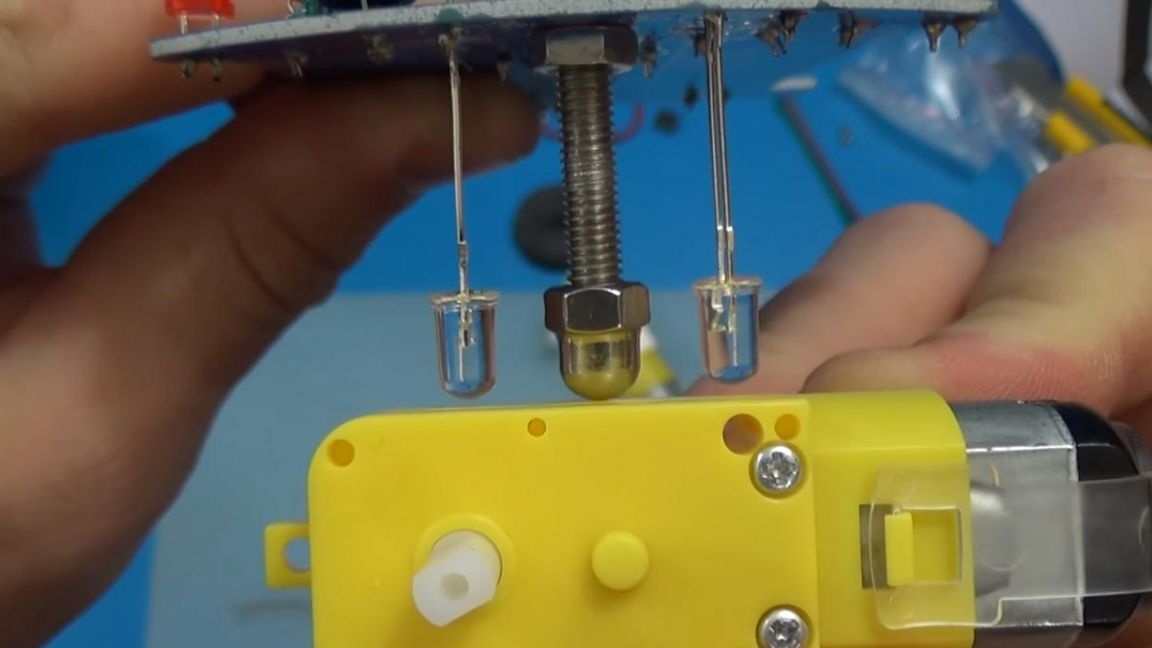
Junto a la placa, suelde los fotoresistores a la misma distancia que los LED.

Paso seis
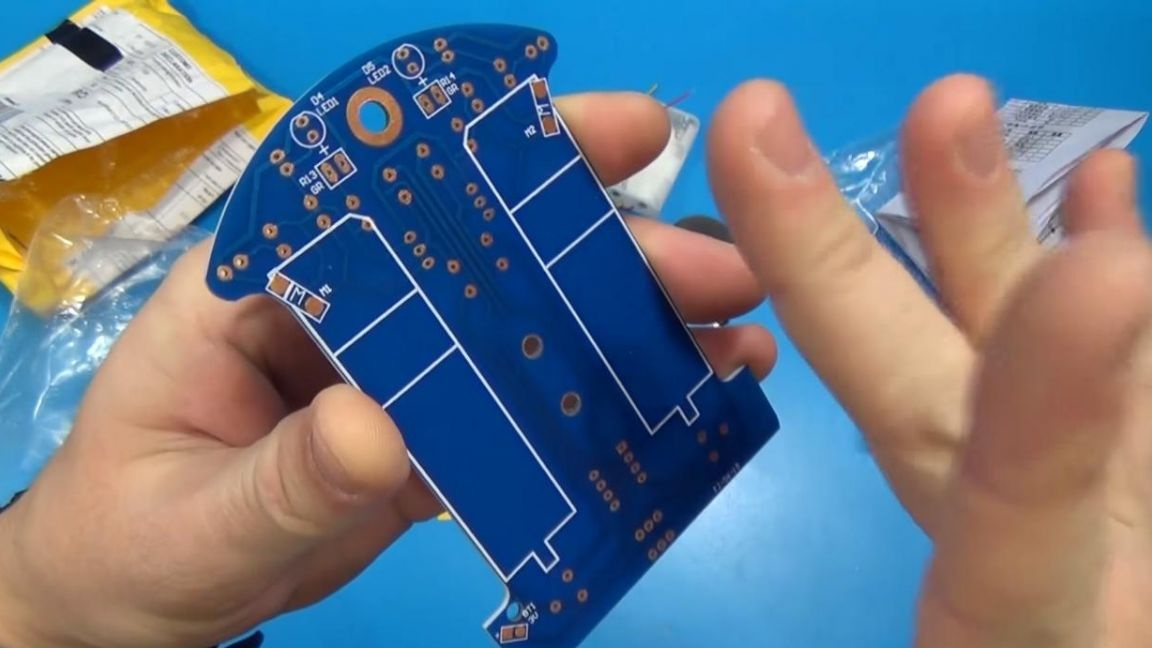
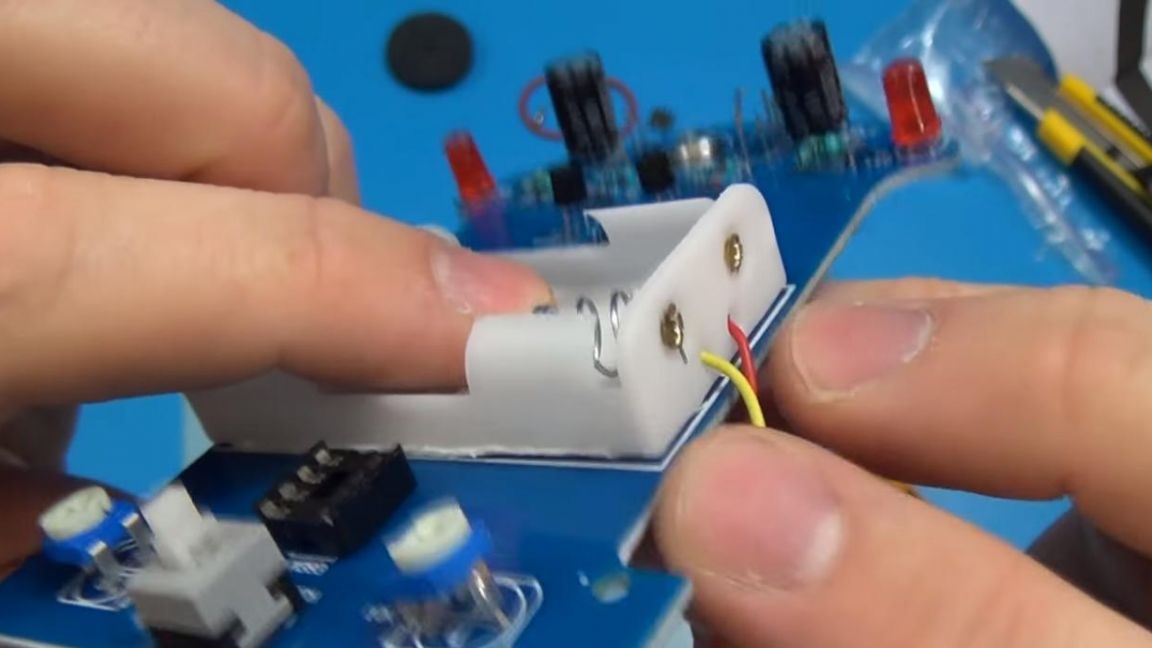
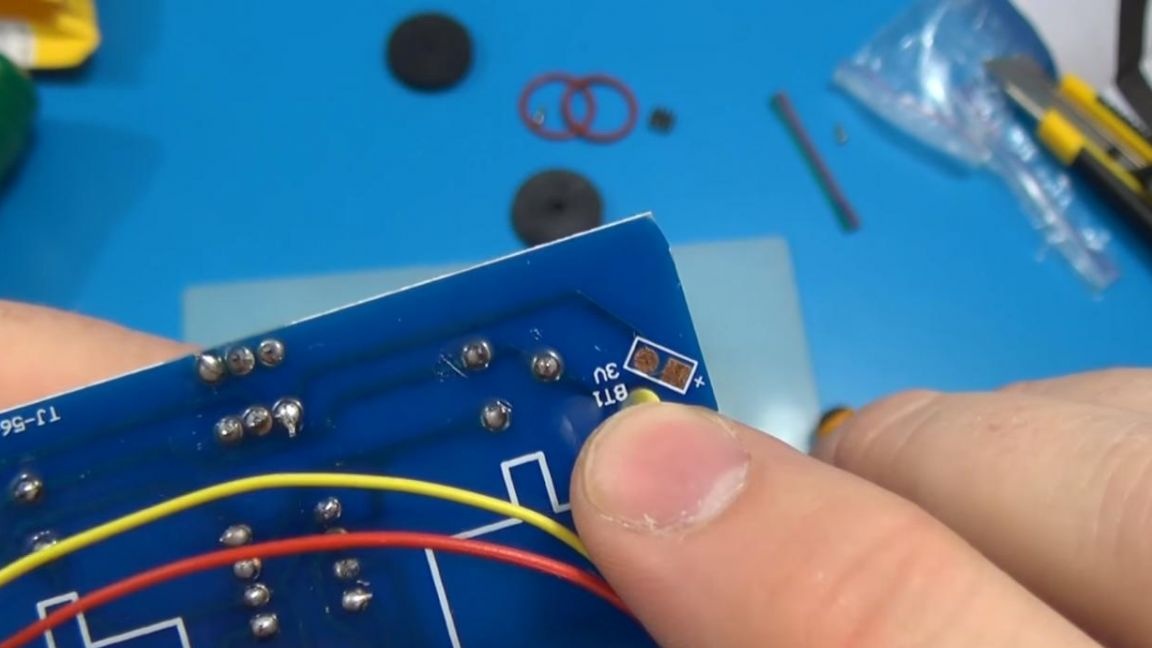
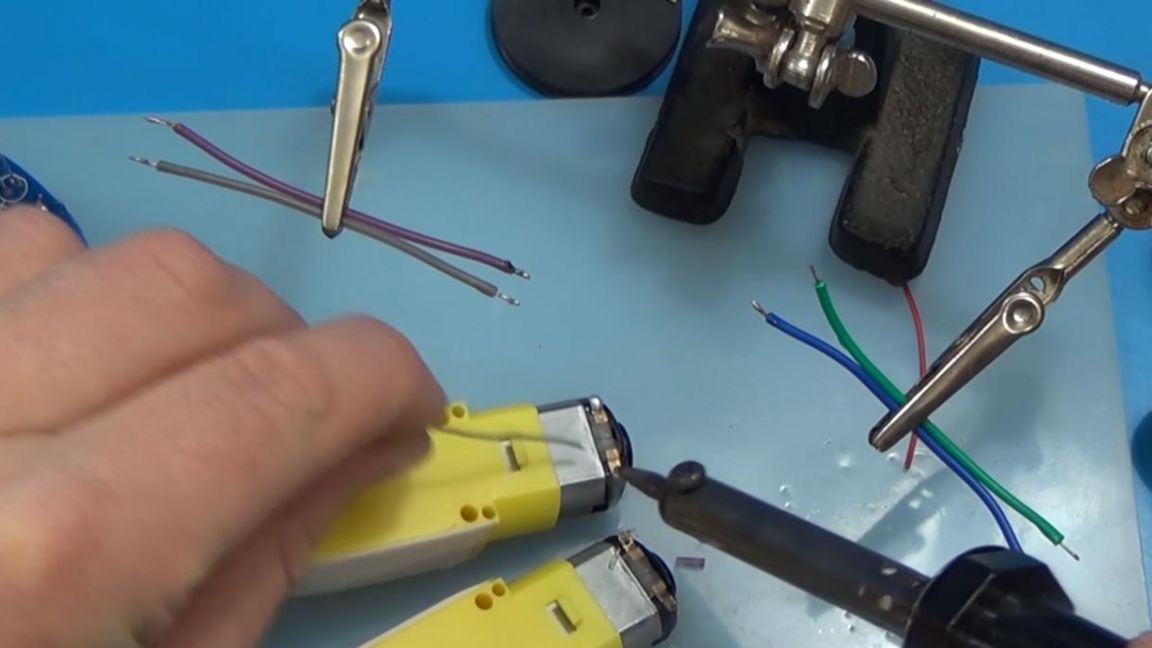
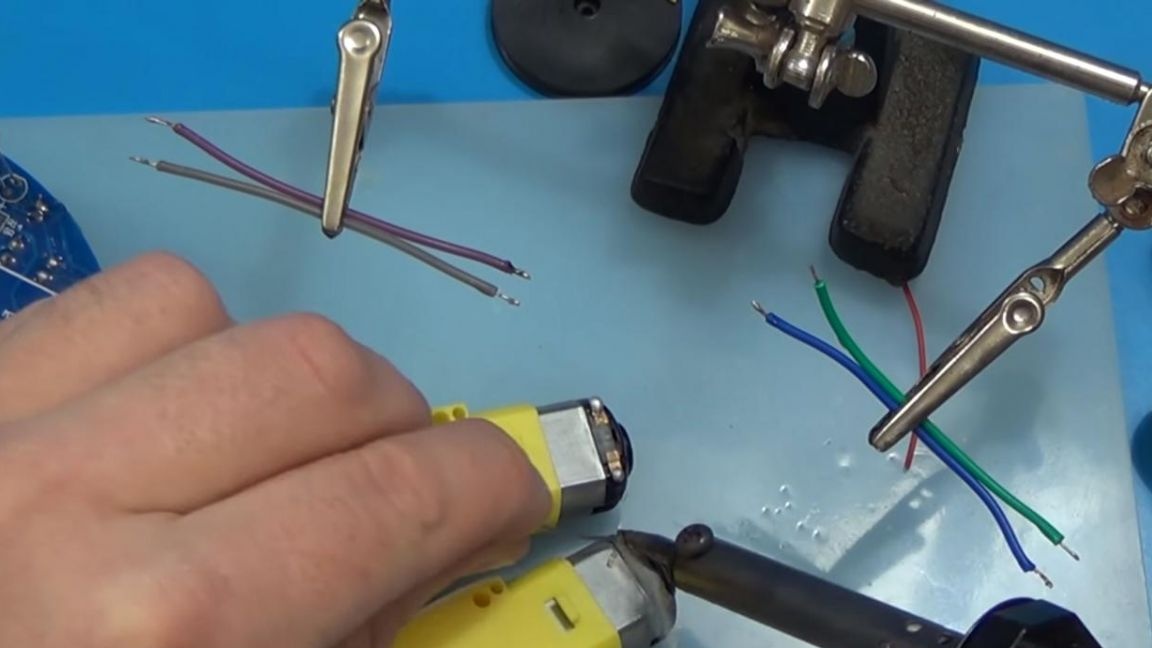
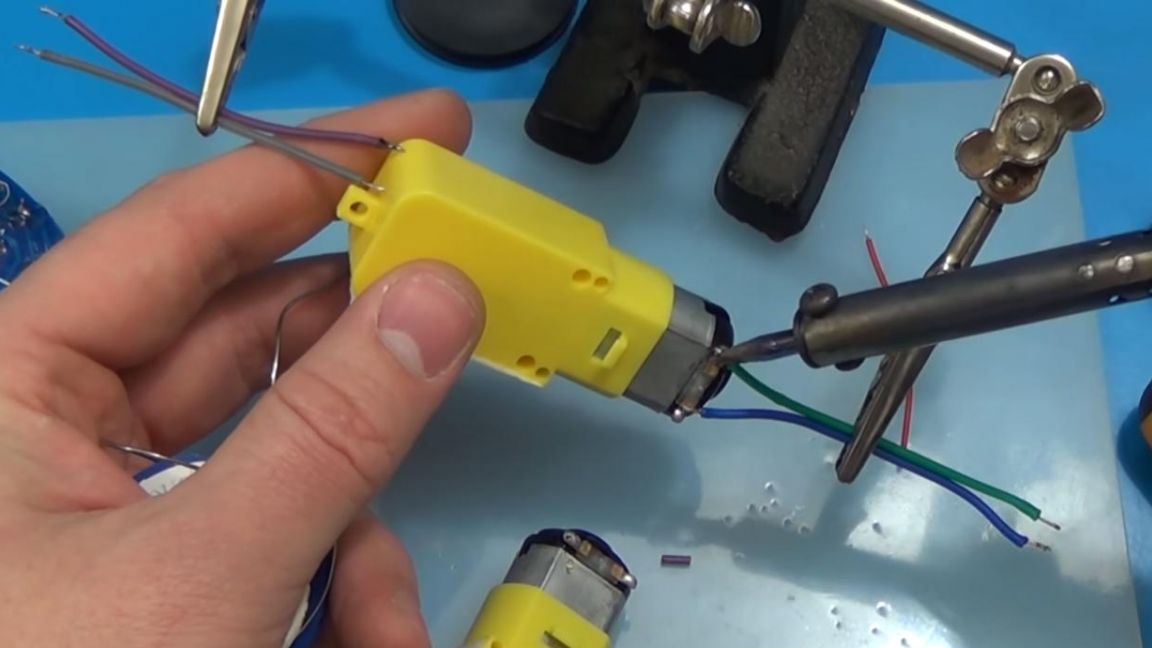
Luego tomamos motores con engranajes, sus contactos deben ser estañados y dos cables soldados a ellos, también pegamos el estuche para instalar baterías AAA y soldamos el cable amarillo al negativo y el cable rojo al positivo, ya que está firmado en el tablero.
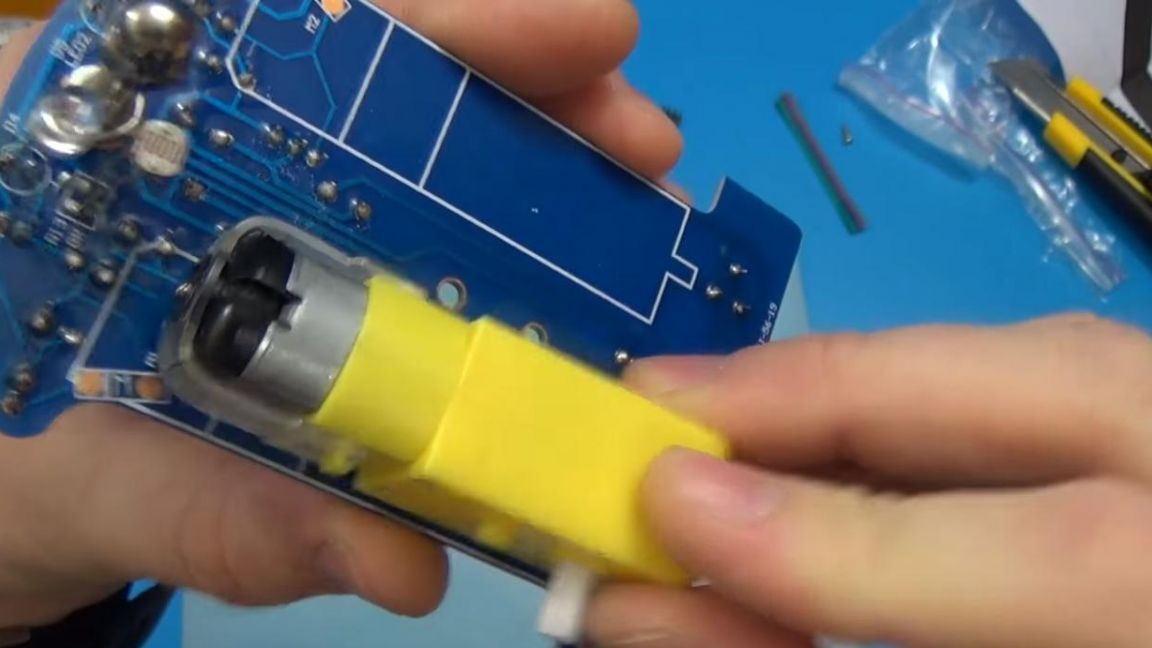

Antes de conectar los motores, debe sujetar las ruedas a ellos, que están sujetos con un perno, y se coloca una almohadilla de goma en la rueda para un mejor agarre.

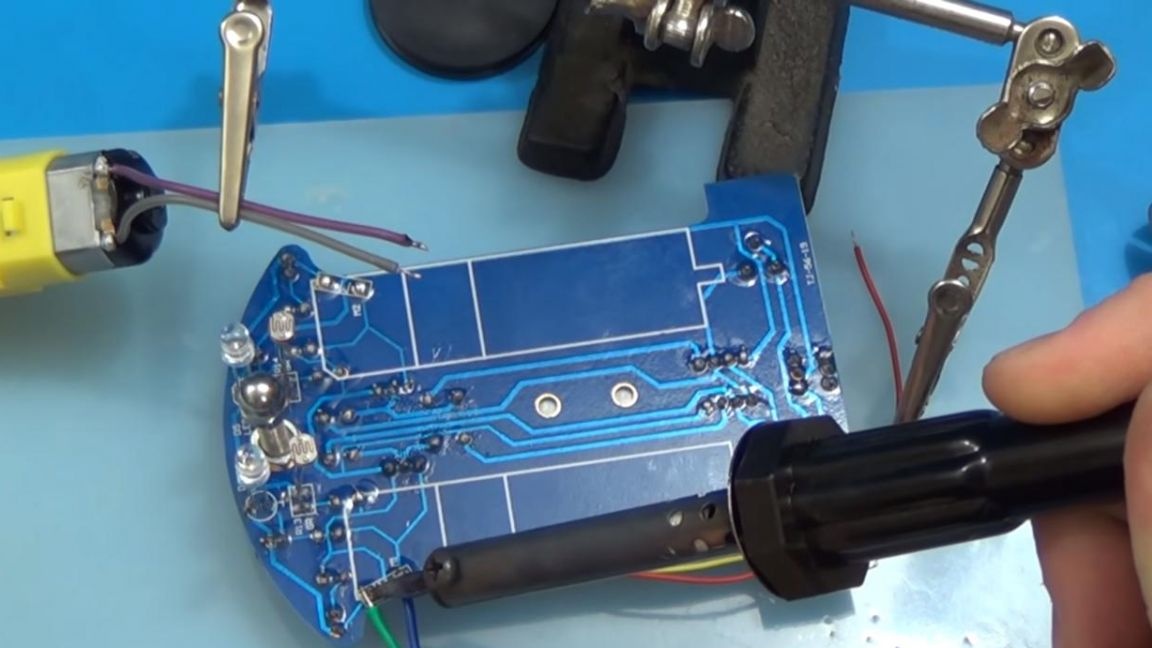
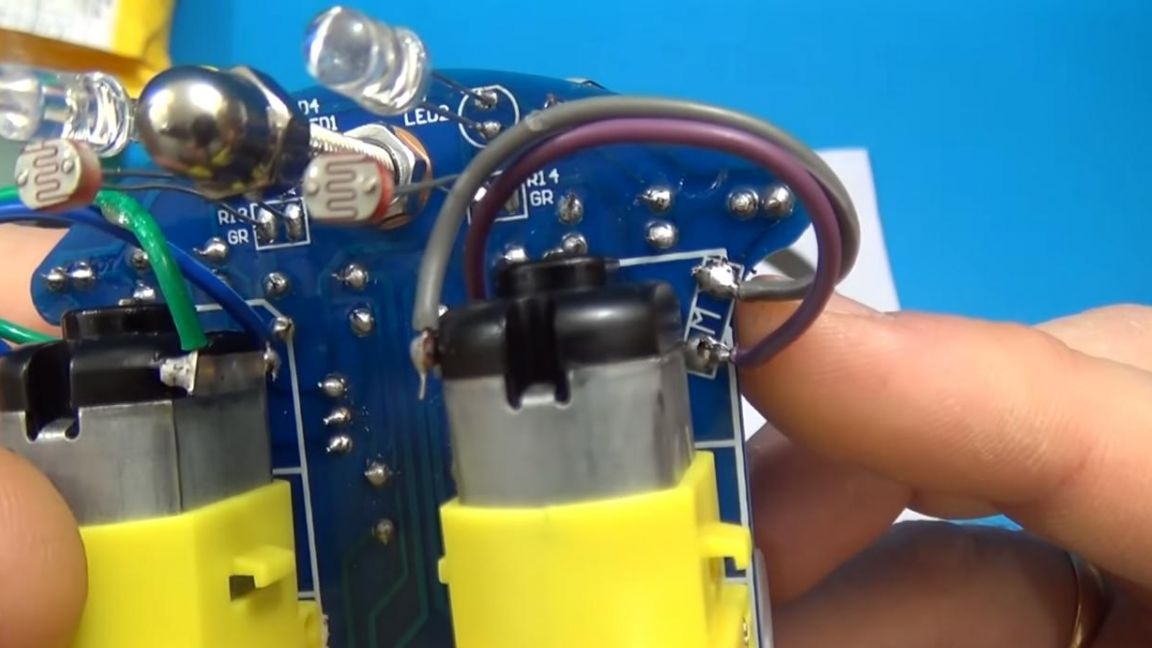
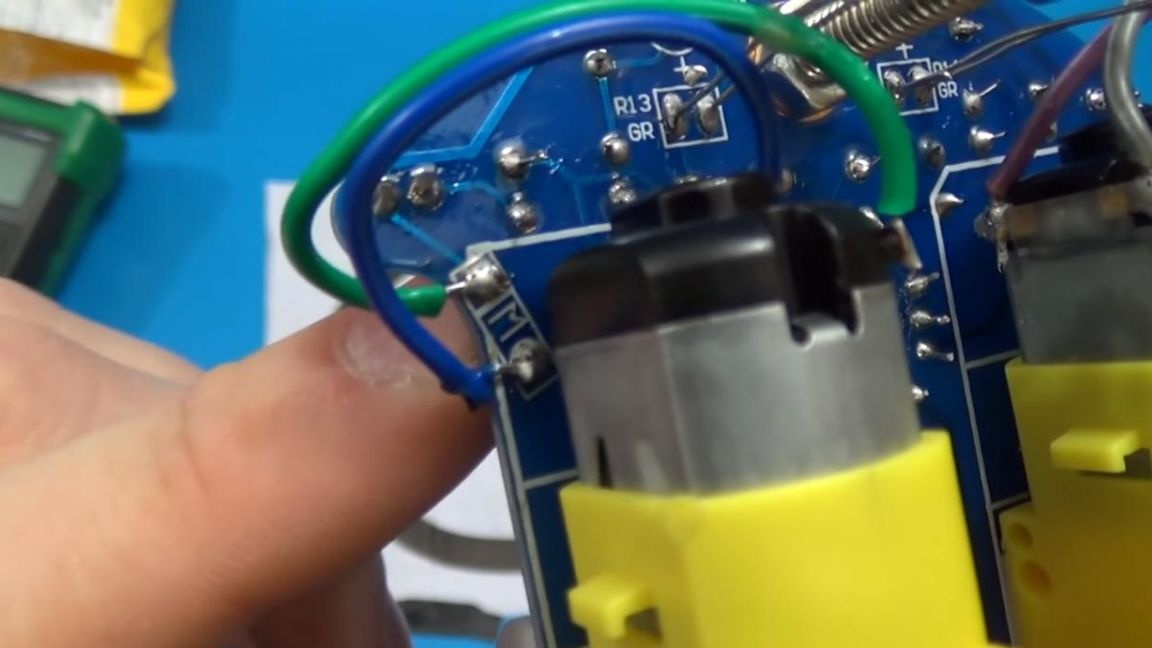
Soldamos los cables de los motores a la placa, desafortunadamente dónde está el más y dónde el menos no se indica aquí, pero por prueba y error se encontró que el contacto superior del motor debe conectarse a la parte superior de la placa con un cable y un soldador, con la parte inferior, respectivamente, hacemos lo mismo .
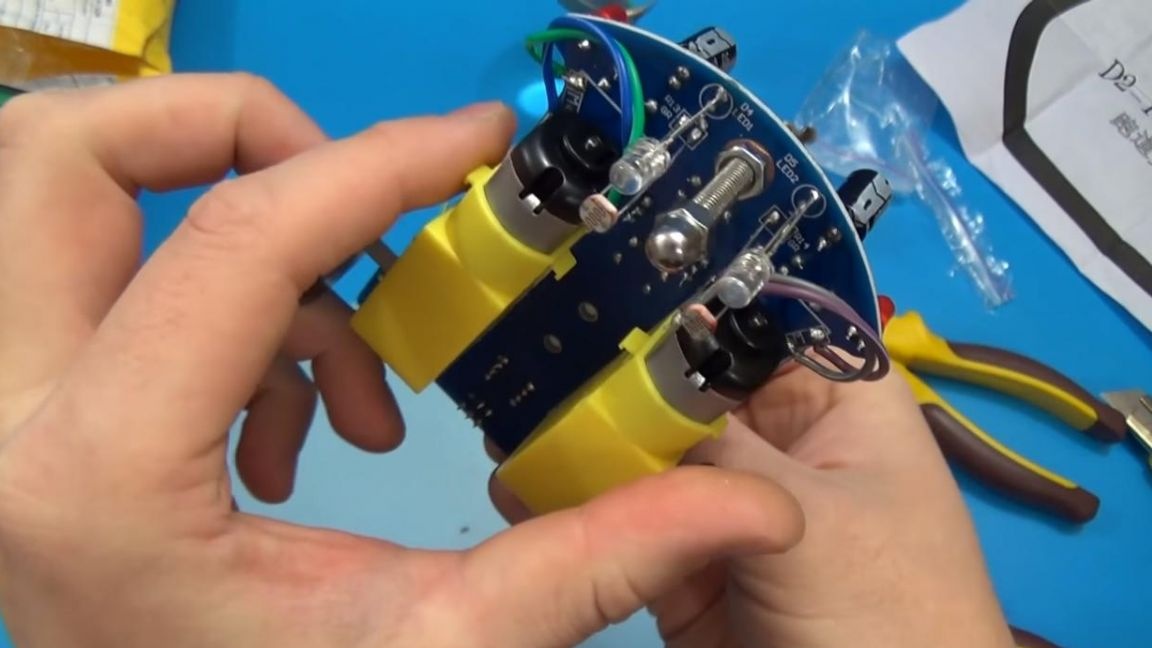
Bueno, al final del ensamblaje, queda instalar el microcircuito en la placa en el lugar que le corresponde, combinar la llave con la placa e insertar las baterías, observando la polaridad.

Séptimo paso.
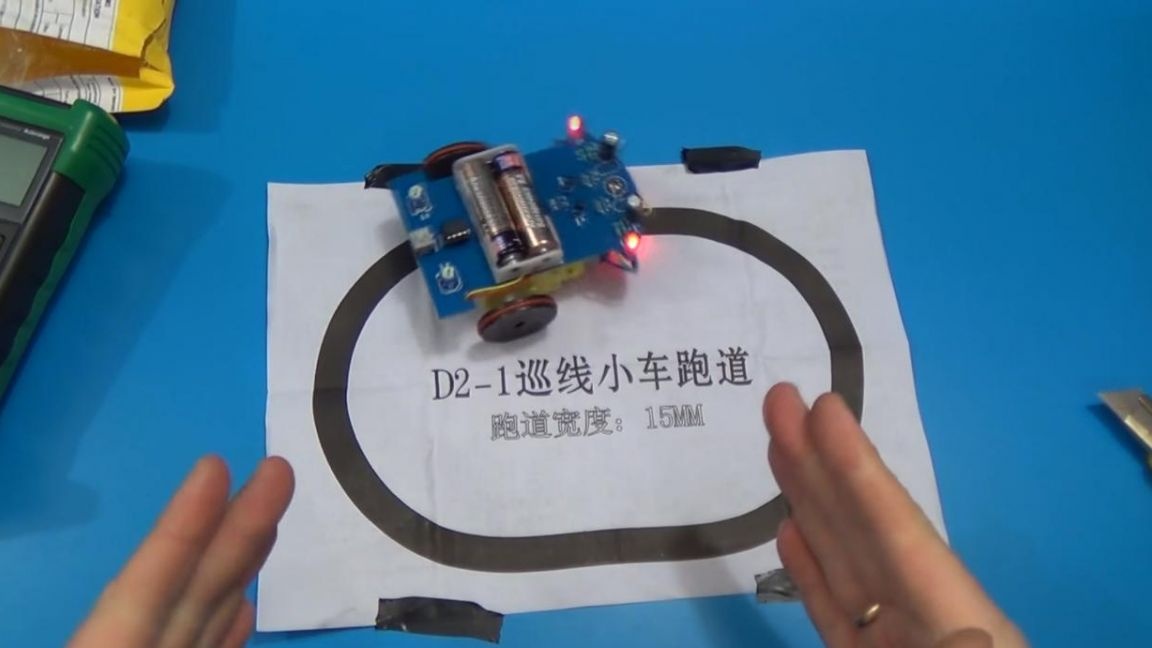
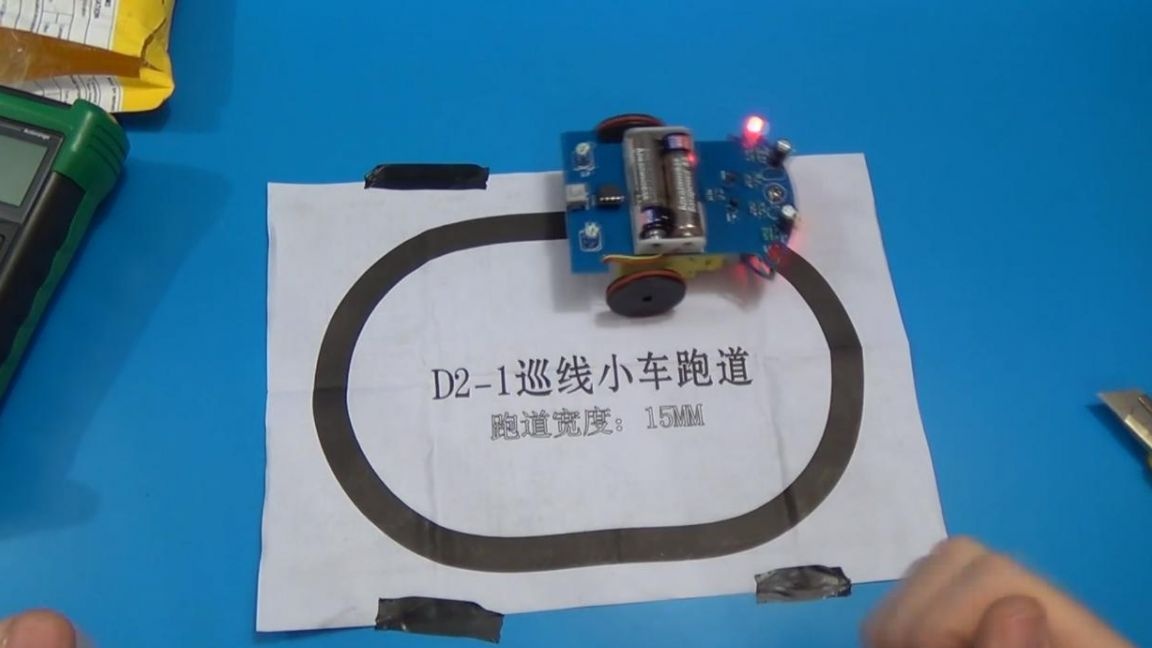
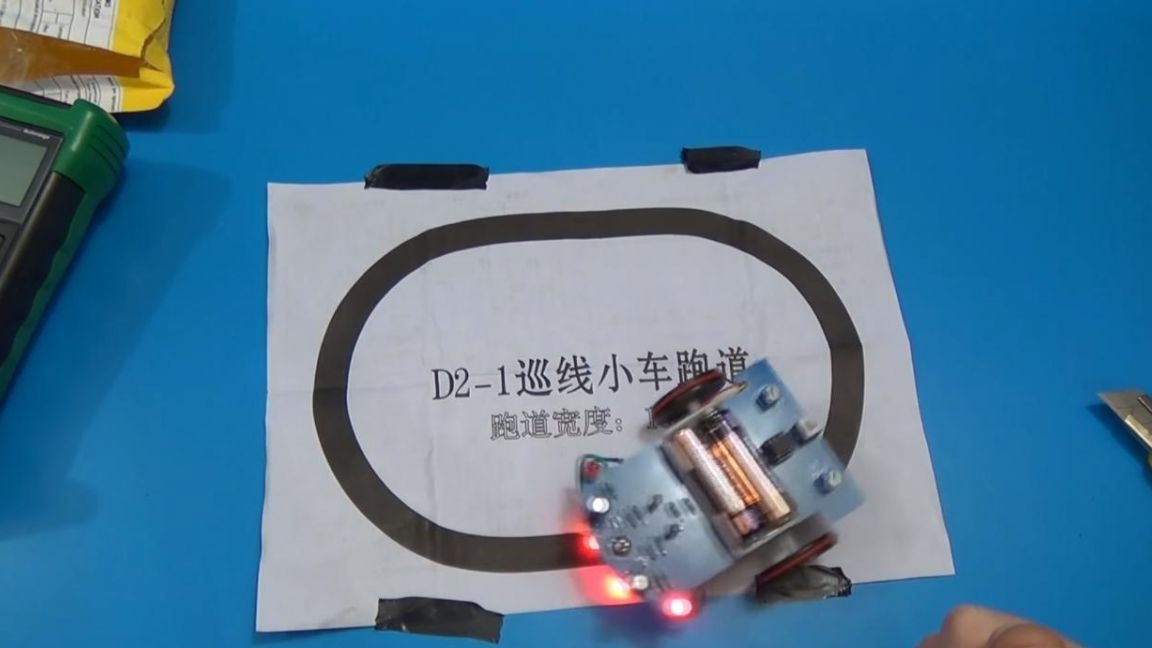
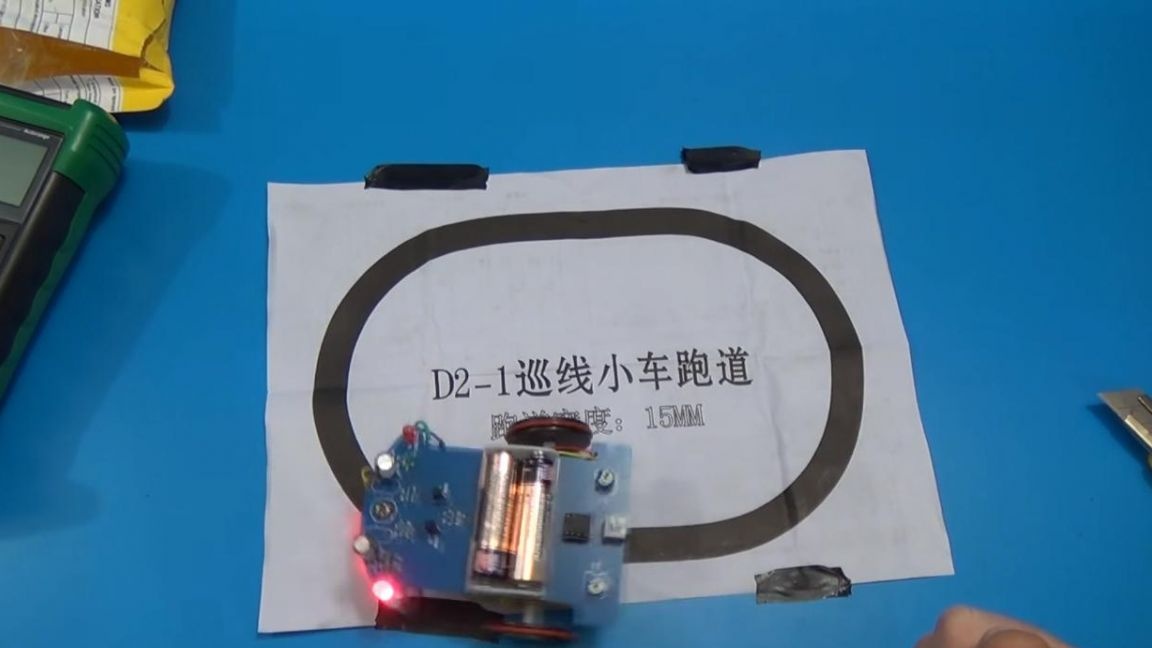
Así que ha llegado el momento de probar este robot, el kit incluyó instrucciones en la parte posterior de las cuales se dibujó un óvalo con una línea con un ancho de 15 mm, que es el valor óptimo.
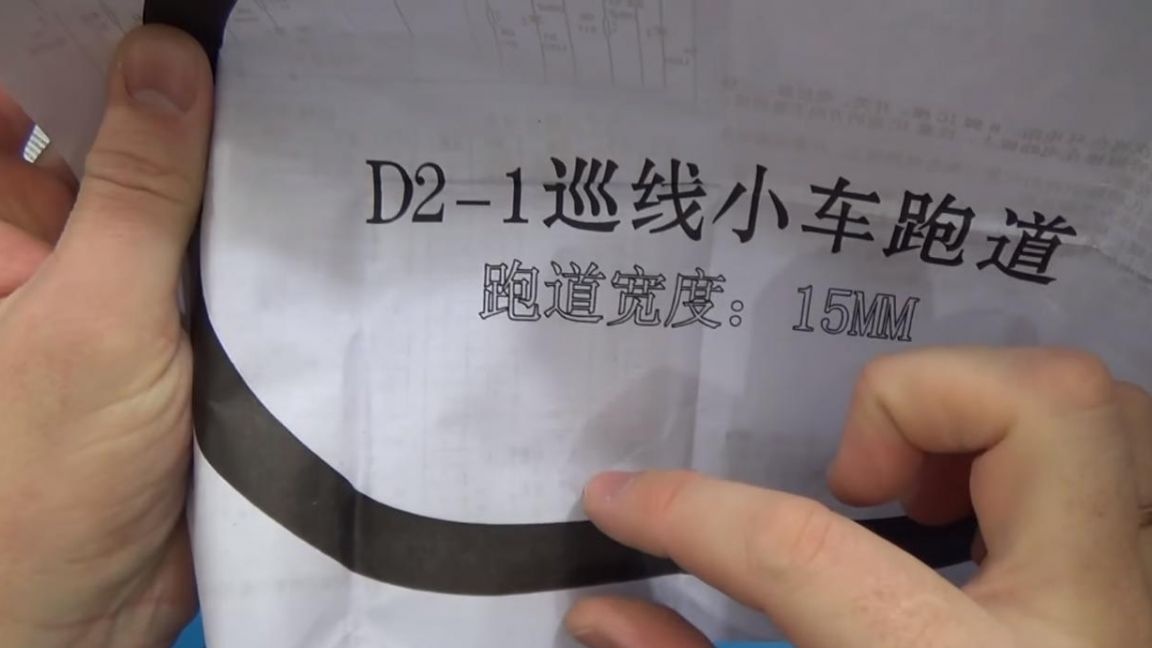
Presione el botón de encendido y el robot Fui, para su correcto funcionamiento, las líneas no deben ser afiladas, es decir, él no podrá hacer giros bruscos. Por ejemplo, puede hacer una pista con giros suaves aplicando una cinta aislante con un ancho de 15 mm sobre un recubrimiento uniforme.
Eso es todo para mí, gracias a todos por su atención y éxito creativo.