


En este artículo, el Asistente nos mostrará cómo hizo el helicóptero de transporte aéreo Ártico Lego 60193. el modelo quadrocopter La tarea principal en la fabricación del quadrocopter, además de las cualidades de vuelo, era guardar la mayor cantidad posible de piezas originales.
Veamos un video corto que demuestra el funcionamiento del quadrocopter.
Entonces, para la fabricación de dicho quadrocopter, el maestro usó lo siguiente
Herramientas y materiales:
-LEGO City Helicopter Helicopter - 60193:
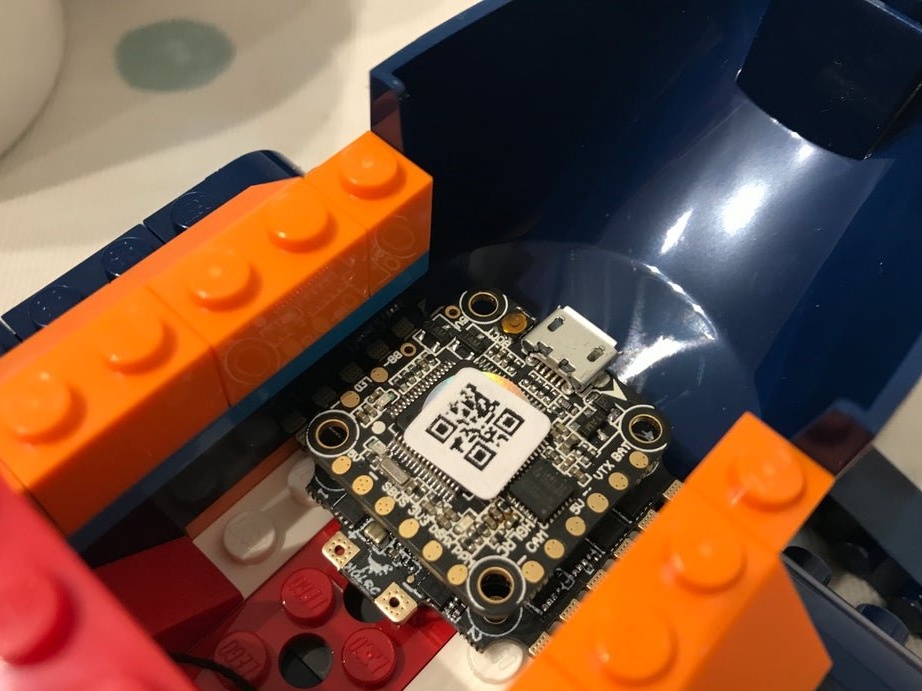
- Controlador y ESC 20x20 mm, por ejemplo, HGLRC XJB F428 Micro F4 AIO OSD;
- Motores sin escobillas - 4 piezas;
Hélices
-Batería 950 mAh;
-Conectores;
-Cable;
-Módulo de radio (transmisor y receptor);
-Sujetadores;
-Cuchillo
-Soldador de hierro;
-Pistola de pegamento;
- destornillador
-Taladro;
Paso uno: Lego Build
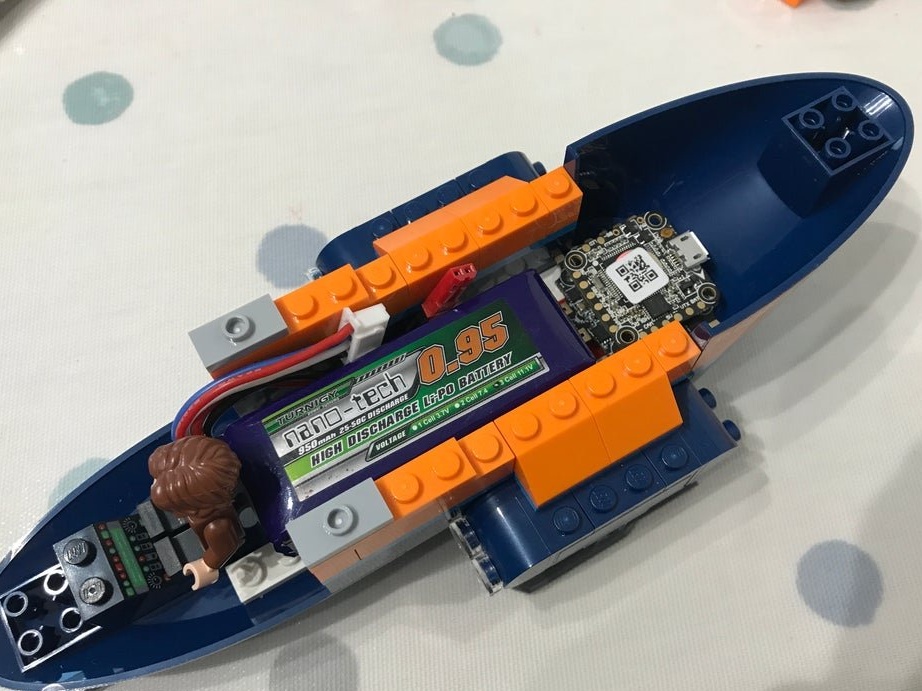
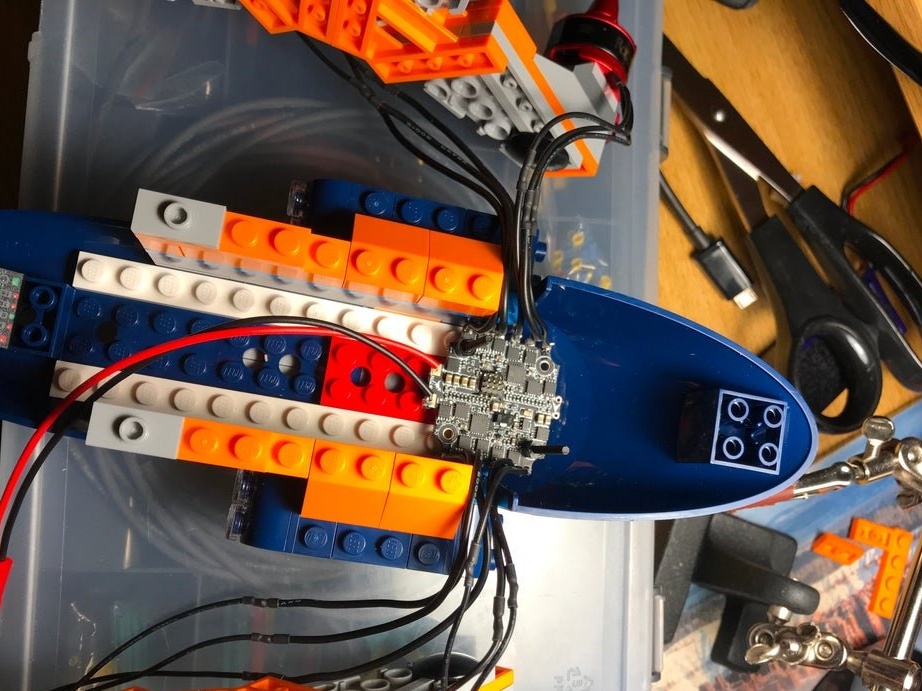
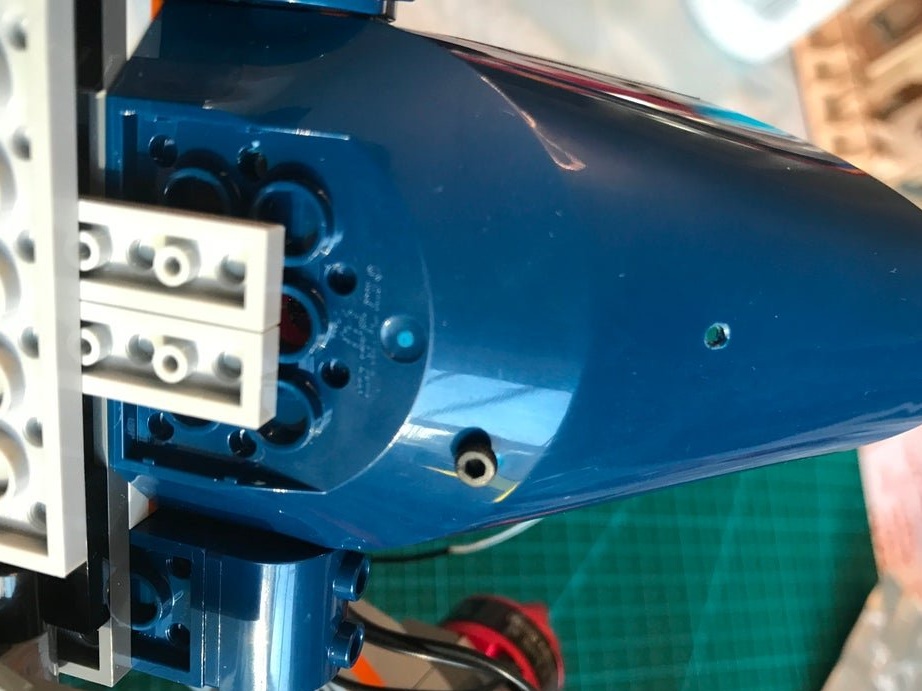
Primero, el maestro recoge el LEGO-Arctic. Luego el modelo se desmonta parcialmente. En el interior, debe colocar la batería y el controlador, observando el equilibrio del modelo.


Paso dos: montaje del motor
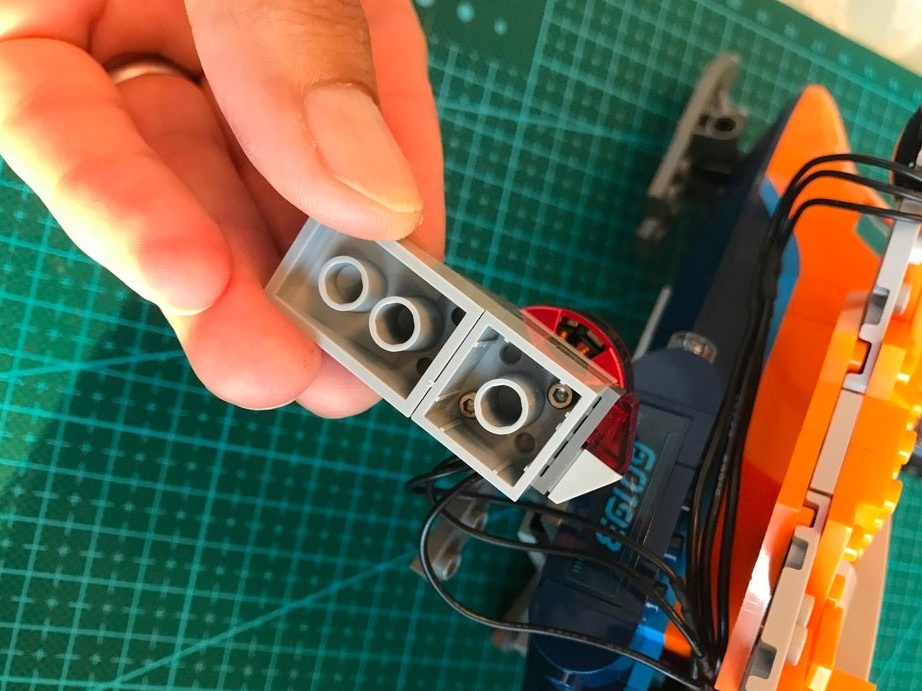
Los orificios de montaje para el motor sin escobillas 1806 estándar son prácticamente los mismos que los pernos en la placa LEGO 2x2 estándar. Cada montaje "motor" en el quadrocopter tiene una baldosa gris oscuro 2x2 (LEGO 3022) y una baldosa gris claro 2x2 con un pasador vertical (LEGO 2460), que generalmente se sostiene en los cubos de una hélice LEGO en la parte superior.
El maestro perfora los agujeros de montaje. En los motores, en el centro hay una marea baja. Se perfora un agujero debajo en el centro de la baldosa. Asegura los motores.








Paso tres: hombros
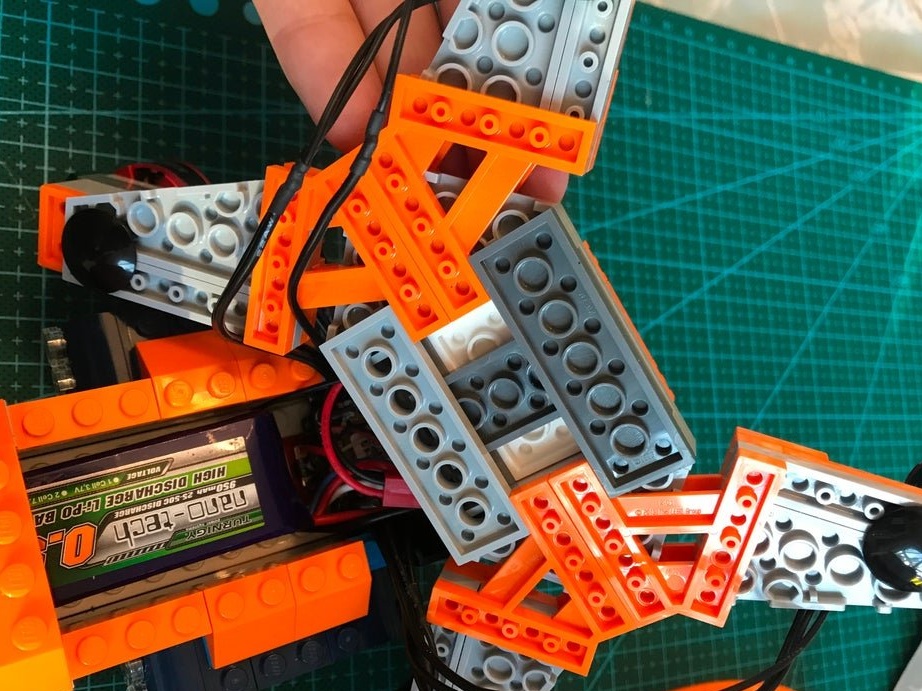
Al reorganizar los "hombros" del quadrocopter, puede cambiar ligeramente el diseño para proporcionar una disposición más amplia o más estrecha de los motores y la ubicación de los tornillos entre sí.
El ensamblaje estándar de LEGO (primera foto) tiene “hombros” y motores ubicados anchos (horizontalmente) con una superposición de tornillo bastante grande. El maestro rehace los "hombros" y lanza el motor y, en consecuencia, los tornillos.



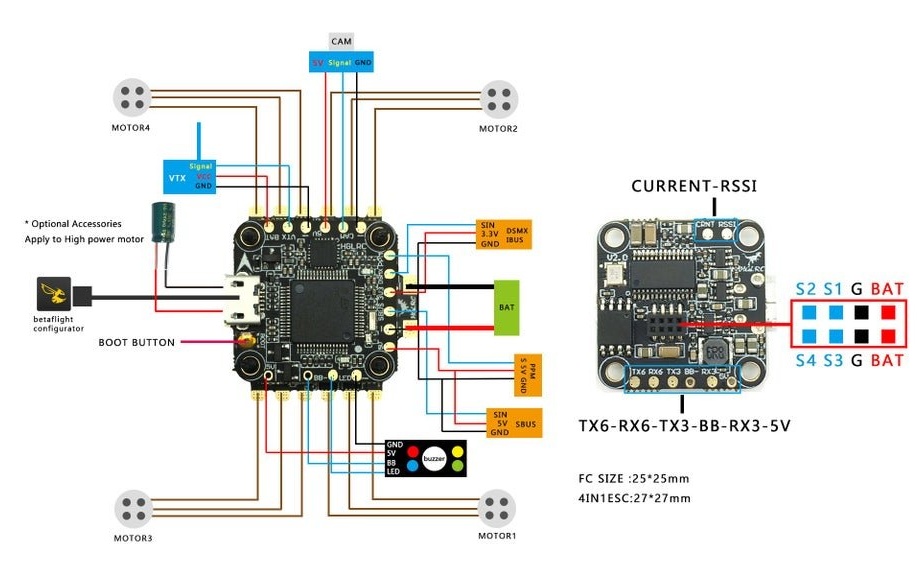
Paso cuatro: electrónica
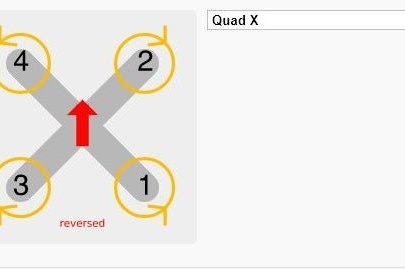
Según el esquema, instala electrónica. La primera foto muestra un diagrama de la dirección de rotación de los motores. La dirección de rotación también se puede cambiar en la etapa de programación.

Una vez completada la instalación y antes de conectar la batería, el asistente verifica las conexiones para evitar roturas o cortocircuitos.
Cuando enciende la alimentación, debería ver las luces en el controlador de vuelo y algunos pitidos del ESC.
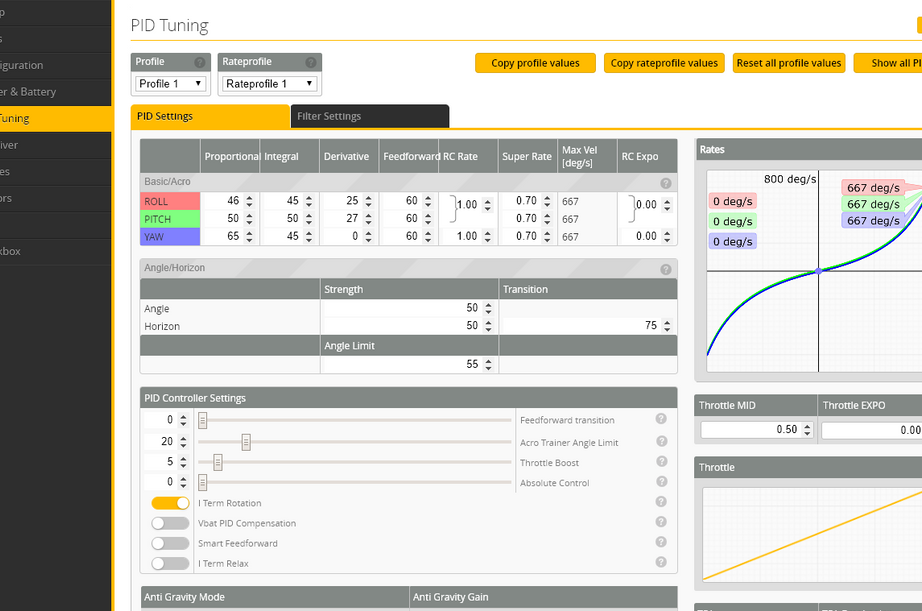
Paso cinco: configuración
Ahora que todo está conectado, es hora de configurar el controlador.Esto significa descargar software (software incorporado) que realiza la tarea de decodificar señales de control del transmisor RC, procesar la señal de entrada del sensor (acelerador, giroscopios) y proporcionar señales de control para que el ESC gire los motores a una velocidad determinada.
¡Retire las hélices por seguridad! No se requiere batería para los primeros pasos de configuración, solo alimentación USB.
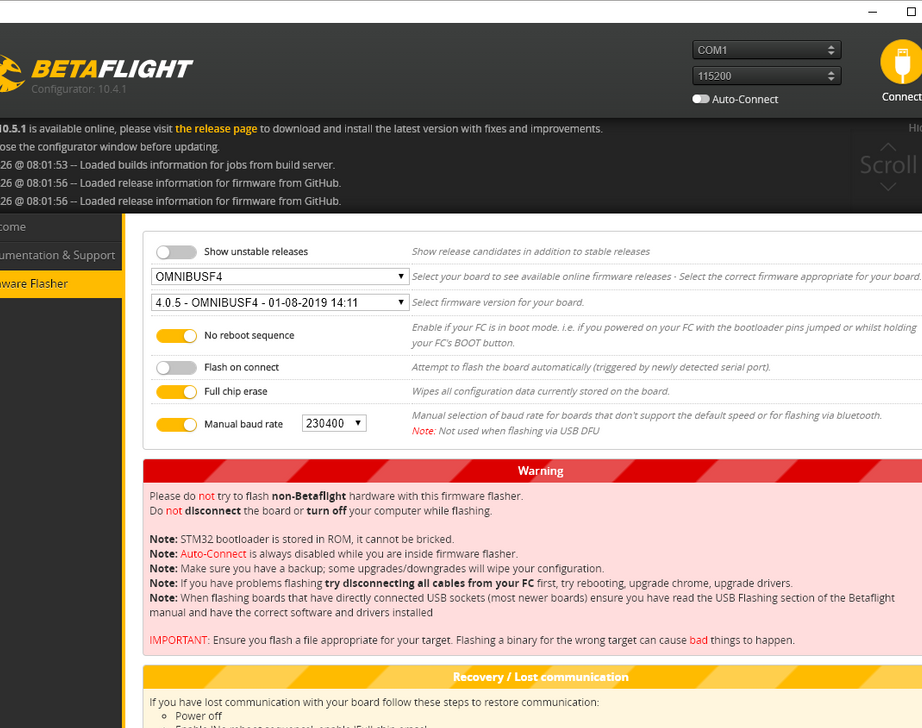
Descargar Beta Configurator
Conecte el cable micro USB al controlador de vuelo. Tenga en cuenta que esto puede ser más fácil de hacer si el controlador no está atornillado al chasis.
Descargue y cargue el firmware apropiado para el controlador de vuelo.
betaflight-settings-legoquad.txt
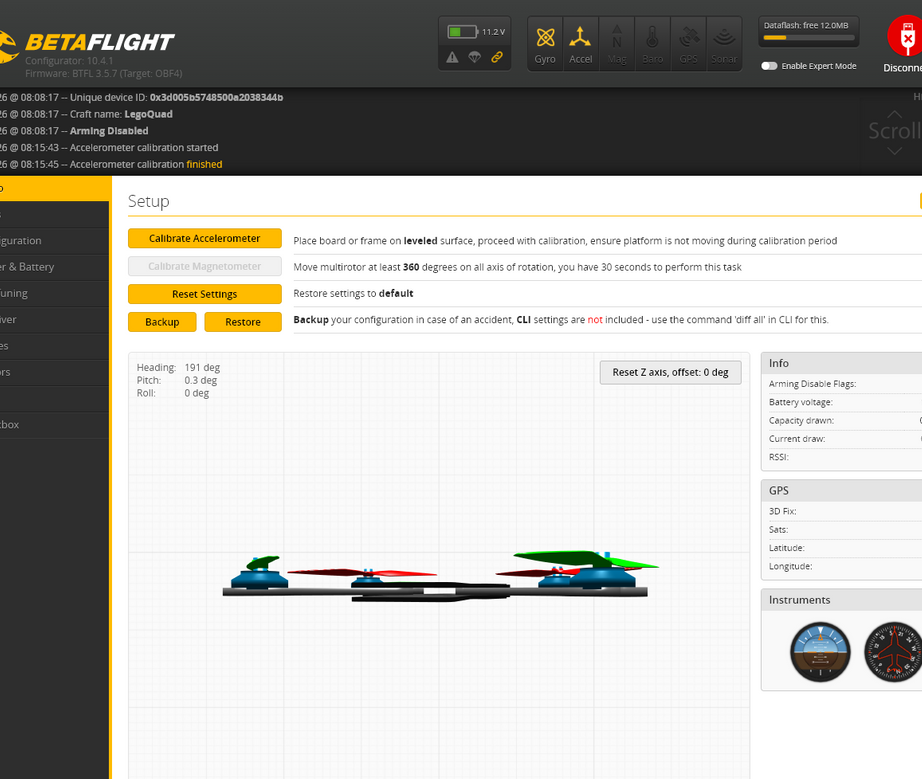
Haga clic en el botón "Conectar" y configure los siguientes ajustes:
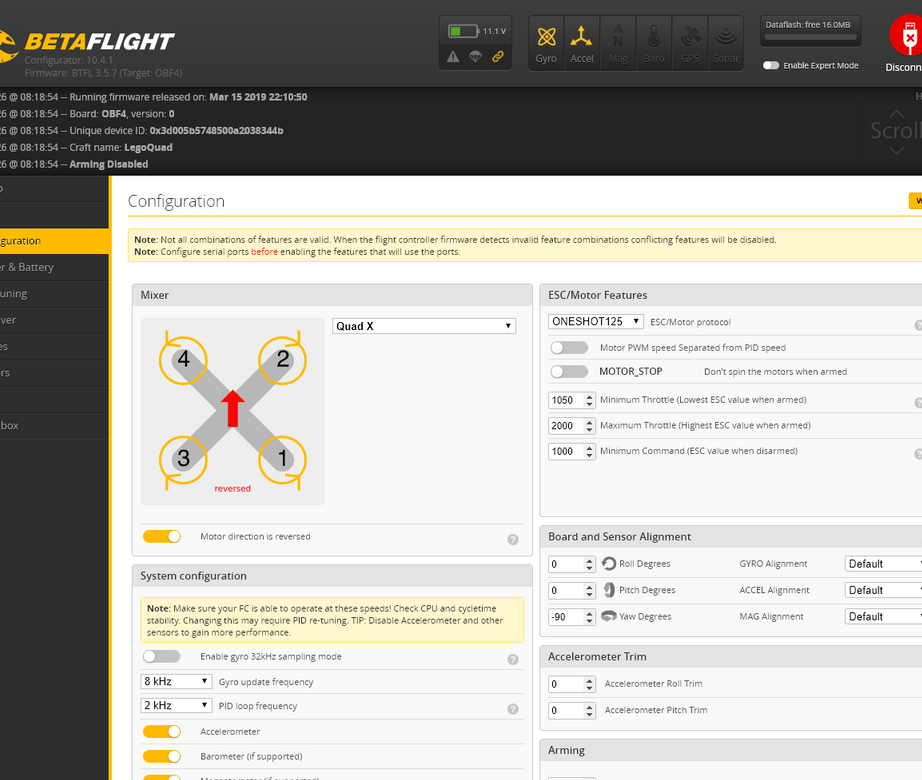
1. Configuración - calibración modelo de motores
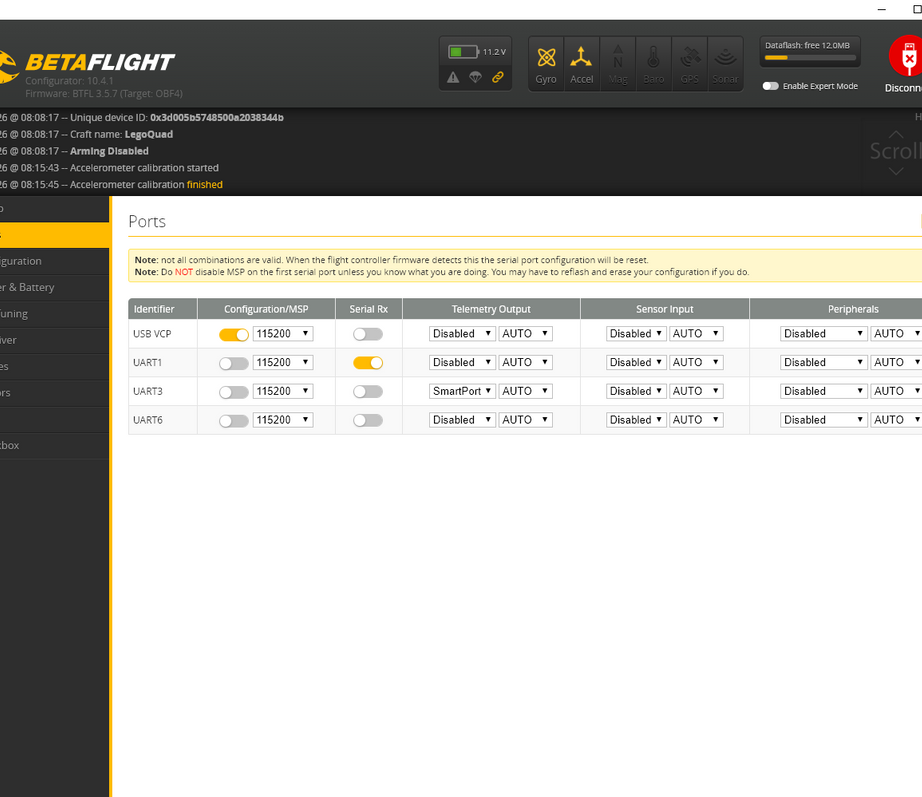
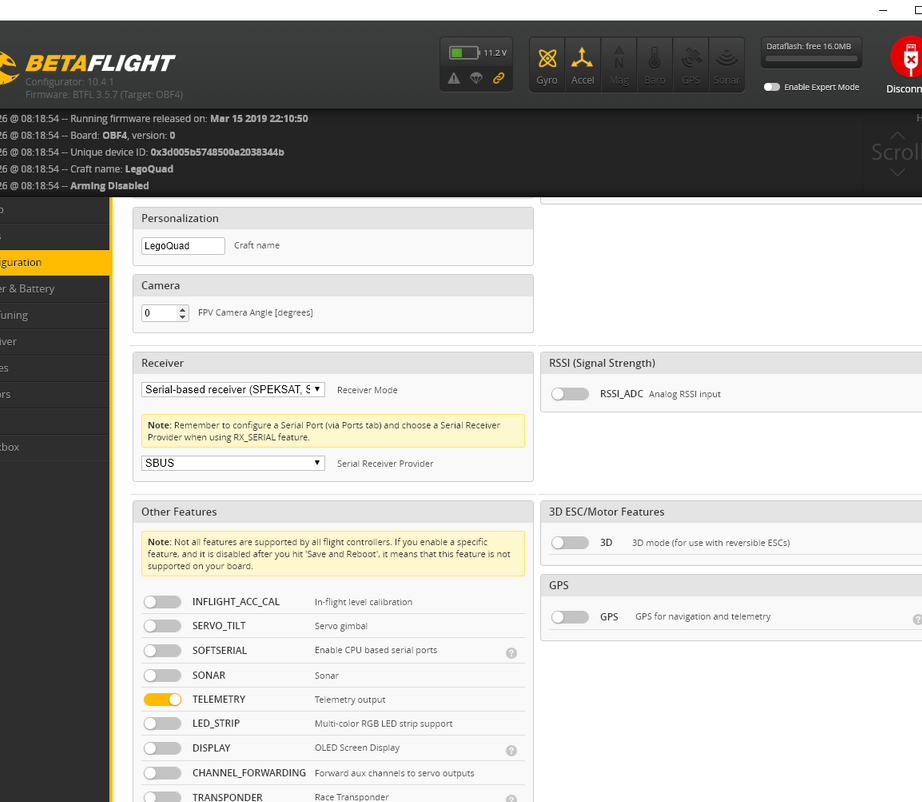
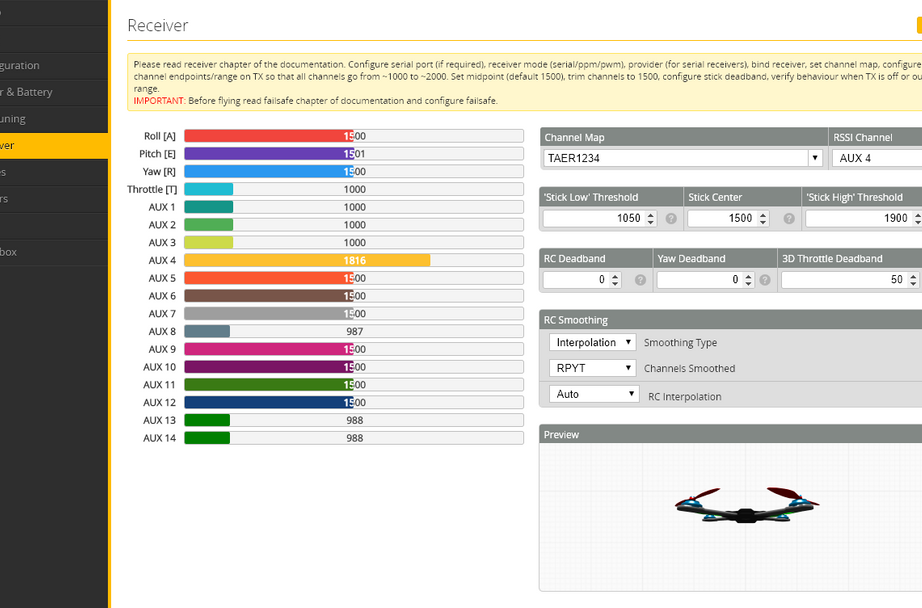
2. Especifique los puertos - UART1 - Serial RX para conectar el receptor SBUS RC
3. Guardar y reiniciar
4. Establezca una conexión entre el receptor y el transmisor.
5. Sobrecarga
6. El valor para el maestro PID se establece en 250
7 Conecte la batería
8. Ajuste el voltaje.
9. Asegúrese de que la visualización de su canal y la dirección de control sean correctas, cuando todo esté configurado, la imagen del modelo del cuadricóptero en la esquina inferior derecha debe moverse en todas las direcciones correctas al mover los joysticks en el controlador RC.
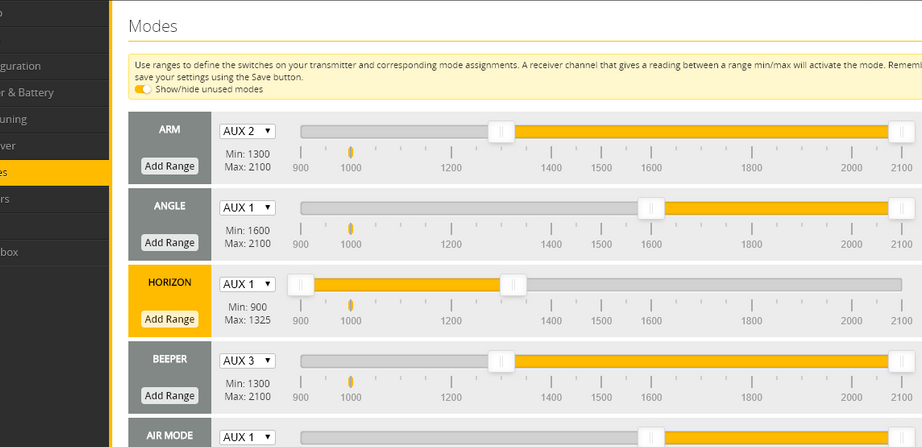
Configura los modos.
ARM encendido / apagado
HORIZONTE autonivelante / ACRO para vuelos FPV tradicionales
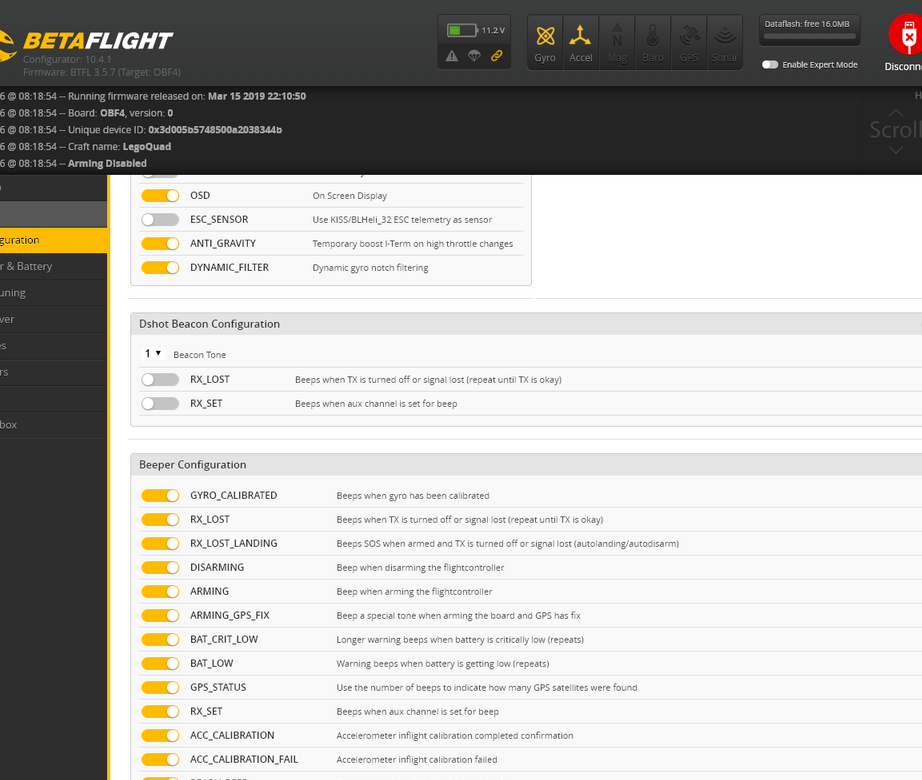
BEEPER: útil si pierde el modelo en hierba alta o arbustos.
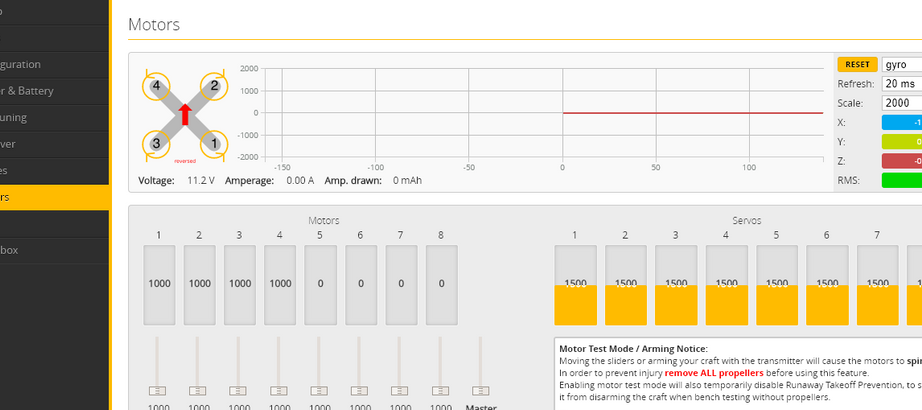
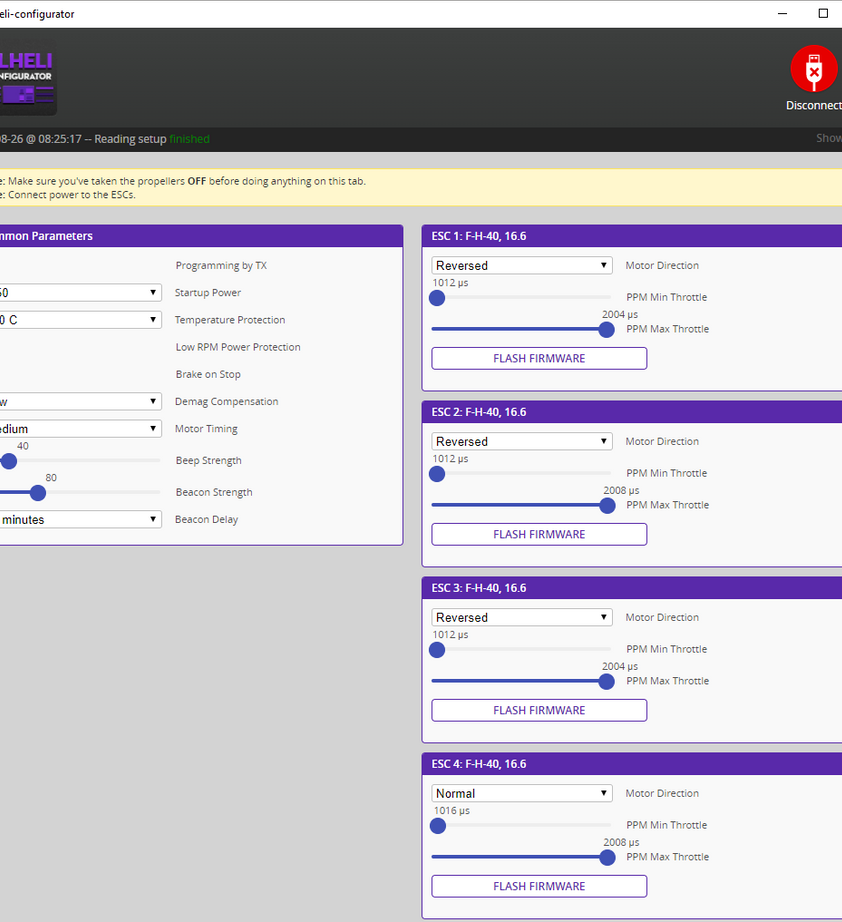
Pestaña Motores: use esta opción para verificar cada motor individualmente y, lo que es más importante, marque la dirección de rotación de cada uno de ellos.
Corrija cualquier dirección de rotación incorrecta con el configurador BLHELI
Después de todos estos pasos, puede desconectar el USB y la batería, y luego encender la alimentación y verificar que todo funcione:
Encienda el transmisor y encienda
Conecte la batería y monte el quadrocopter en una superficie plana
Encienda el interruptor ARM y los motores deberían comenzar a girar a baja velocidad.
Controle el acelerador mientras aumenta la velocidad
En modo horizontal, intente inclinar el quadrocopter y asegúrese de que los motores reaccionen adecuadamente, por ejemplo, inclínelo hacia adelante y los motores delanteros acelerarán.

Paso seis: Asamblea final
Prácticamente toda la estructura de la carcasa se sujeta con cerraduras de montaje. El maestro solo usa adhesivo termofusible para montar los motores.


Todo está listo y puedes probar.



