


Primero, comprendamos la diferencia entre el octocopter y el quadcopter. Además del nombre, este también es el número de motores en los rieles. Es decir quadrocopter - cuatro motores, octocopter - ocho. Esto también es cierto para el hexacopter - seis, tricopter - tres, etc. Si las guías, por ejemplo, son cuatro (X) y ocho motores, entonces esto sigue siendo un octocóptero, pero se designa como X8. Es decir en cuatro rieles, ocho motores.
Básicamente, los números con un prefijo para helicópteros son aviones controlados por la señal de radio del operador desde el suelo. Un estudiante de la India decidió ir más allá y hacer un octocopter capaz de elevar a una persona en el aire. Este no es un proyecto barato. La financiación fue asumida por la institución educativa.
Herramientas y materiales:
- Motores Turnigy CA170 Motores - 8 piezas;
- Controlador Turnigy Fatboy 300A - 4 piezas;
- Controlador Turnigy 200A HV - 4 piezas;
- Transmisor Hitech XG11 Tx / Rx;
-Vuelo controlador DJI A3 Pro;
-Controlador de vuelo DJI Naza M V2;
- Batería Zippy 22.2V 5Ah 40C LiPo - 16 piezas;
- Cargador 6s LiPo Charger;
-XT150 conectores - 50 piezas;
-Alambre 8AWG Sillicone Wire - 10 metros;
Servos;
-Bola para jugar squash (Squash Balls) - 4 piezas;
- Hoja de MDF 25 cm x 50 cm x 2 mm;
-Taladro;
- Amoladora angular;
- Destornilladores
- llaves inglesas;
- alicates;
- Cortador láser o sierra de cinta;
- Surtido de tuercas de 4 mm, 6 mm y 8 mm, pernos y arandelas;
-Quemador;
-LED LED;
-Accesorios para soldar;
- alambre de acero de 2 y 3 mm;
-Tornillo de punta 100mm-200mm - 40 piezas;
- 40 ganchos y cáncamos;
-Tachometer Turnigy RPM;
-Power Analyzer (Turnigy Wattmeter / Ampmeter);
-Controlador de batería;
- Tubos de perfil de aluminio;
-Placa de aluminio;
- Cinta de doble cara;
-Máquina de soldar;
-Roulette;
-Ordenador con Fusion 360;
- Batería 11.1 V 2200 mAh LiPo 30C;
-Tejido denso 1.2m x 1.2m;
- Hilo fuerte y aguja;
-Cinturón de seguridad;
Paso uno: diseño
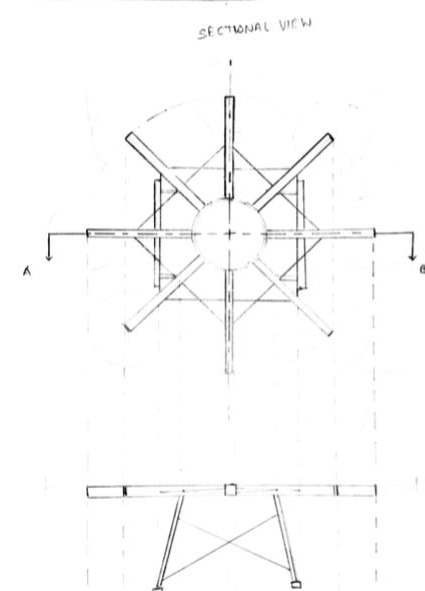
Al desarrollar un octocopter tripulado, el maestro consideró varias opciones de configuración, y X8 y H, y T, pero llegó a la conclusión de que lo más óptimo, por diversas razones, sería el diseño del octocopter, de acuerdo con el esquema tradicional.
Luego fue necesario averiguar cuál debería ser el tamaño del octocóptero. Los cálculos se realizaron utilizando modelos CAD en el Fusion 360 como ejemplo. Los tornillos existentes se tuvieron en cuenta en los cálculos. El diámetro óptimo era de tres metros, una altura de un metro. Cesta interior, para una persona de 55x55 cm.

Paso dos: carro de compras
El marco fue soldado de un perfil cuadrado de aluminio con un estante de 50 mm y un espesor de pared de 2 mm.
El perfil fue cortado y soldado. Se limpian las costuras.



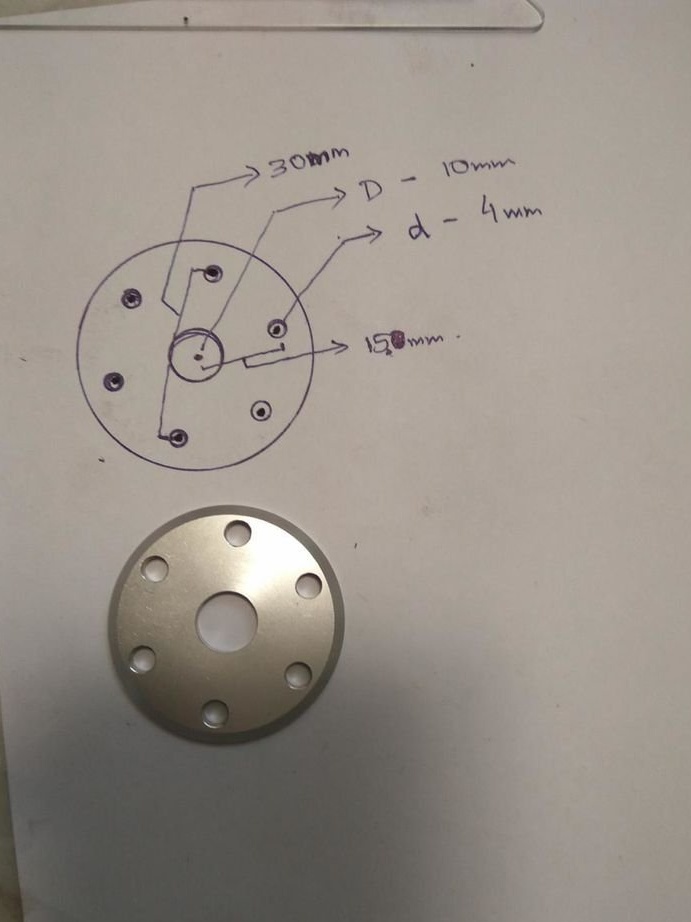
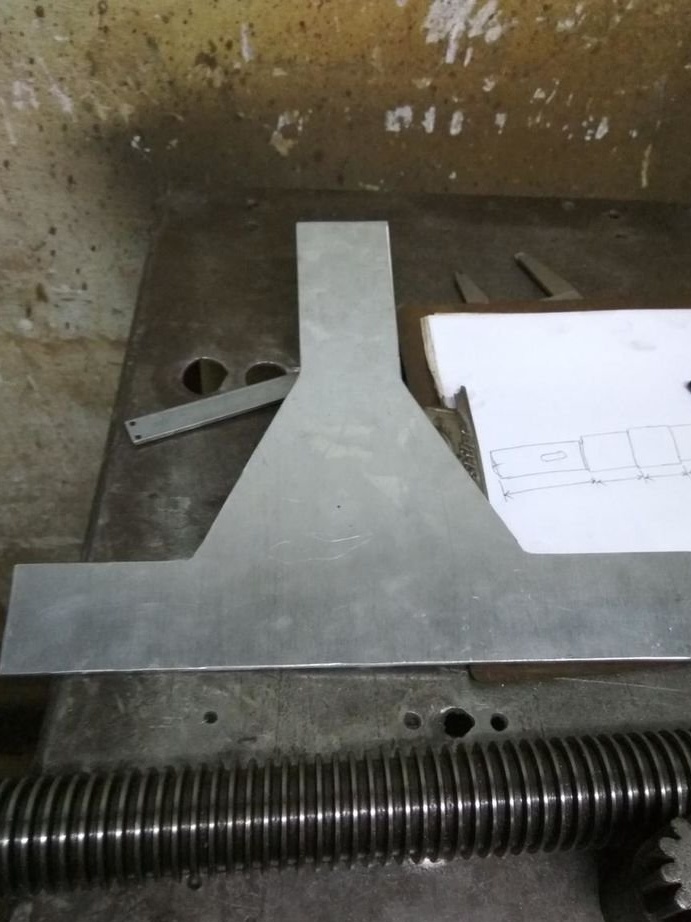
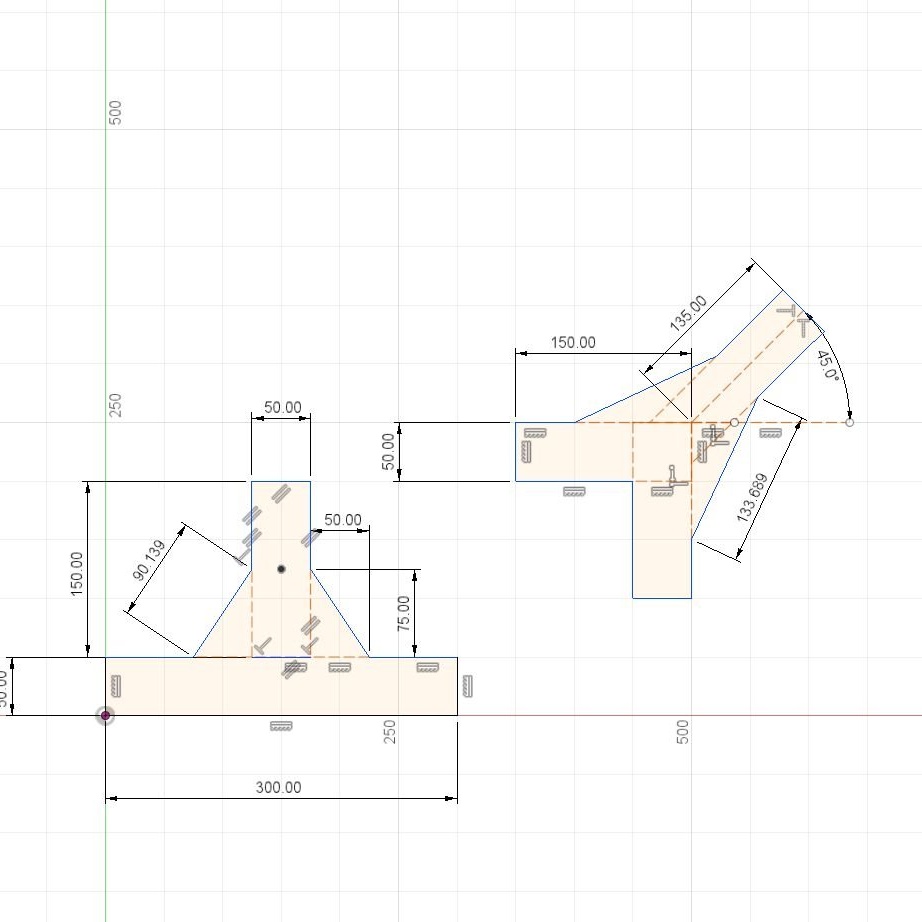
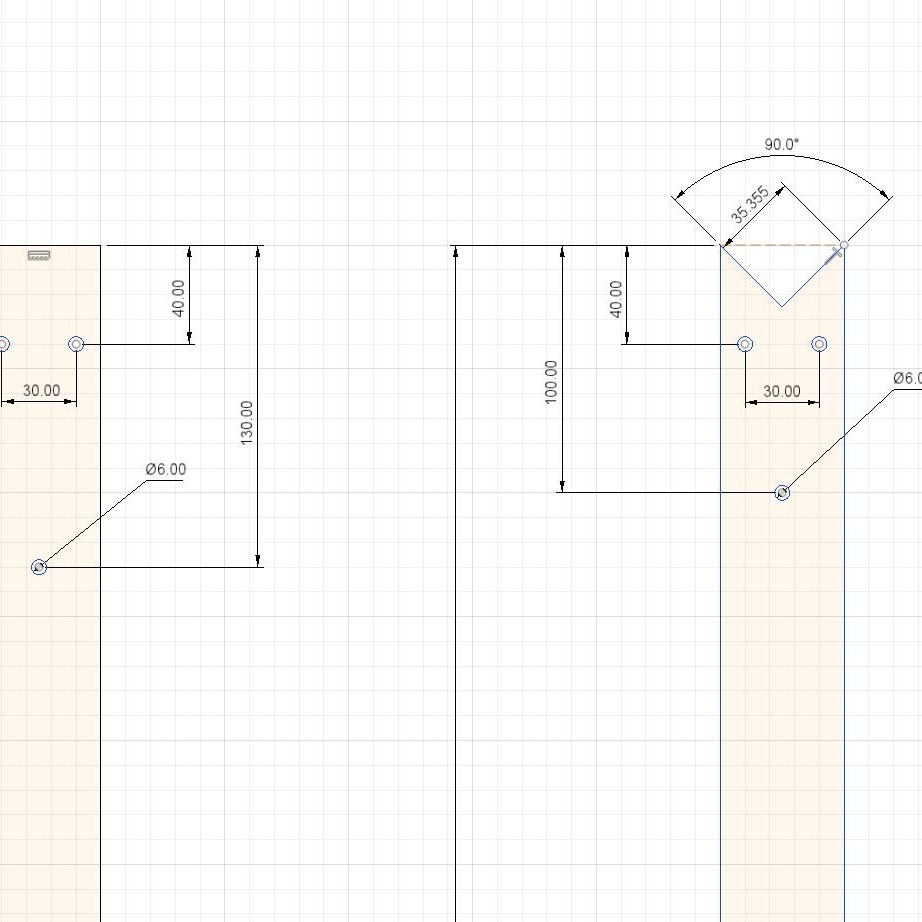
Paso tres: placas de montaje
Para los soportes, el maestro utilizó placas de aluminio de 1,5 mm. Hay ocho soportes en total, cuatro en las esquinas y cuatro en el centro del marco. La longitud del hombro del brazo y la parte de soporte es de 15 cm cada uno. Los soportes se diseñaron en el Fusion 360. Las placas se cortaron con una fresa. Se taladran agujeros de montaje en ellos. Luego, los soportes se soldaron al marco.






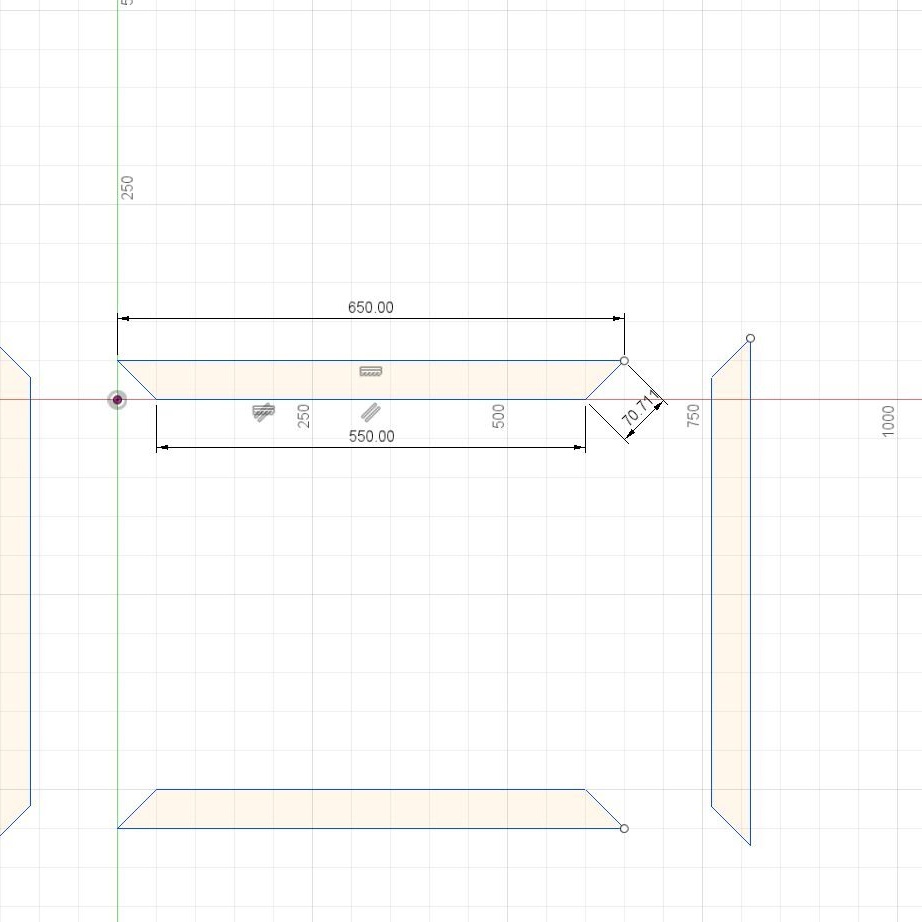
Paso cuatro: Perfil del operador
Estos perfiles están unidos a los soportes y los motores están instalados en sus extremos. Los perfiles son cuadrados, de 50 X 50 cm, y tienen diferentes longitudes. Se adjuntan perfiles de 112,5 cm de largo en las esquinas, perfil de 125 cm en los lados y se hace un corte en los perfiles angulares en un ángulo de 45 grados. Es necesario que su cara final sea adyacente al plano del ángulo.
Para fijar los perfiles a los soportes, el maestro perfora agujeros para los pernos.




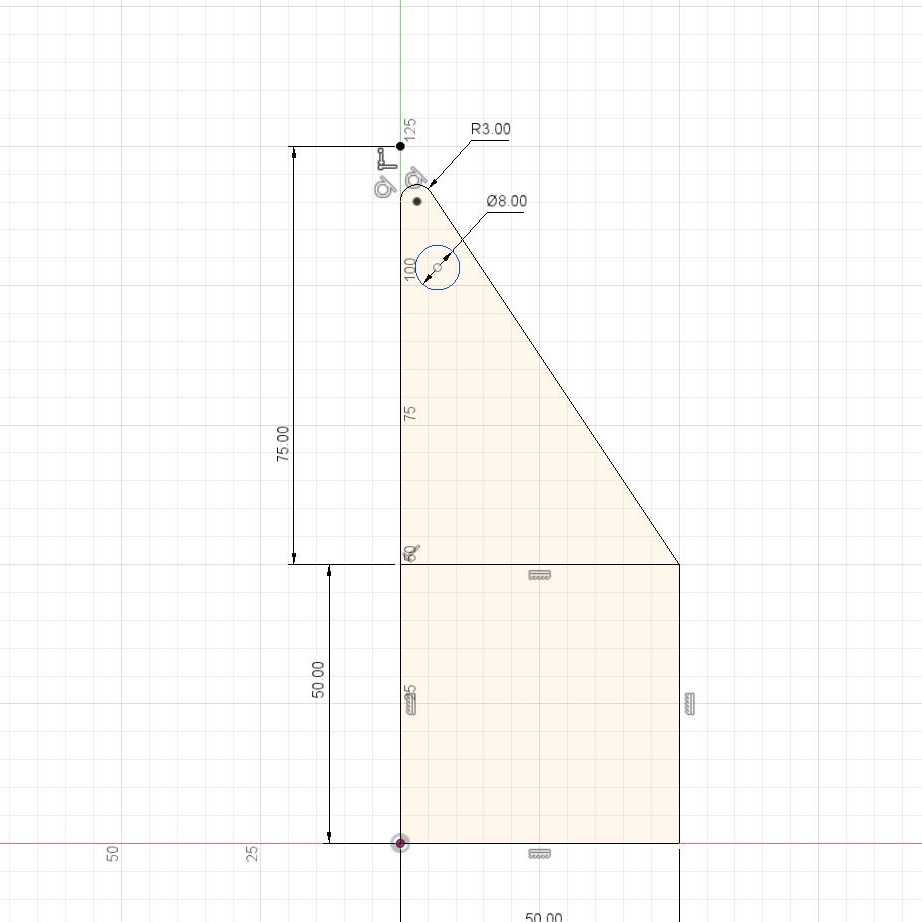
Paso cinco: montaje del motor
Los motores se atornillan en una placa cuadrada de aluminio. Desde la parte inferior de la placa, paralelas entre sí, se atornillan dos esquinas. La distancia entre ellos es igual al ancho del perfil. Además, la placa con el motor se monta en el perfil, se taladran los orificios de montaje y todo se tuerce con pernos.





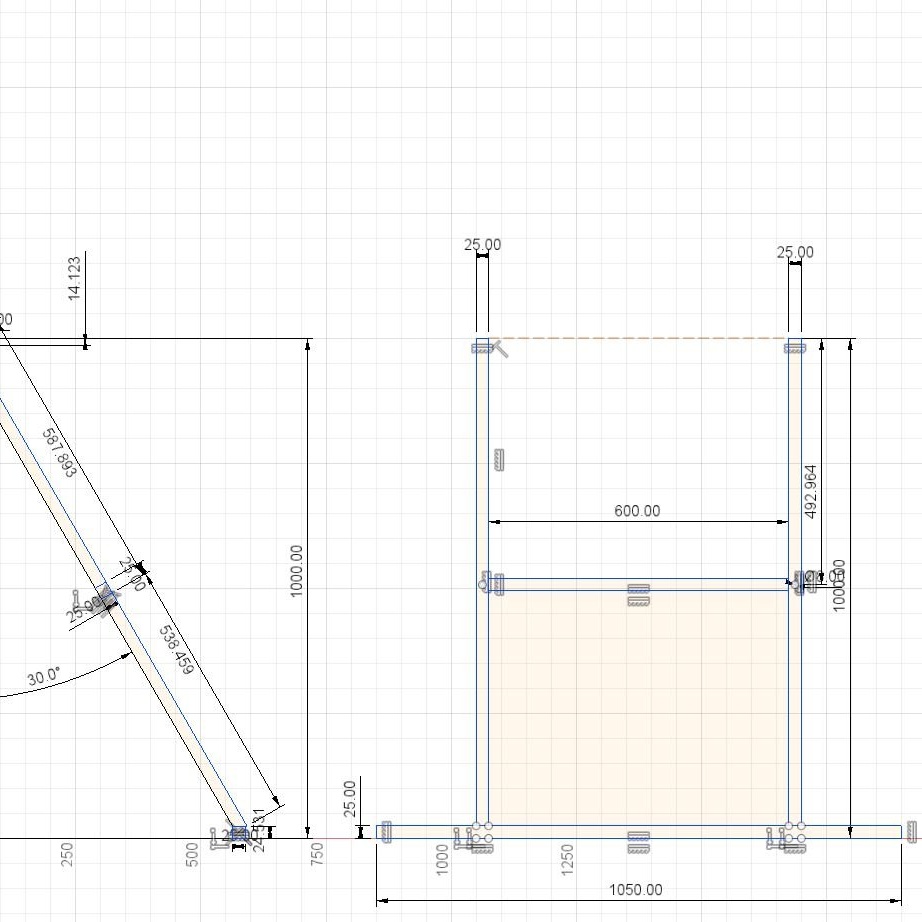
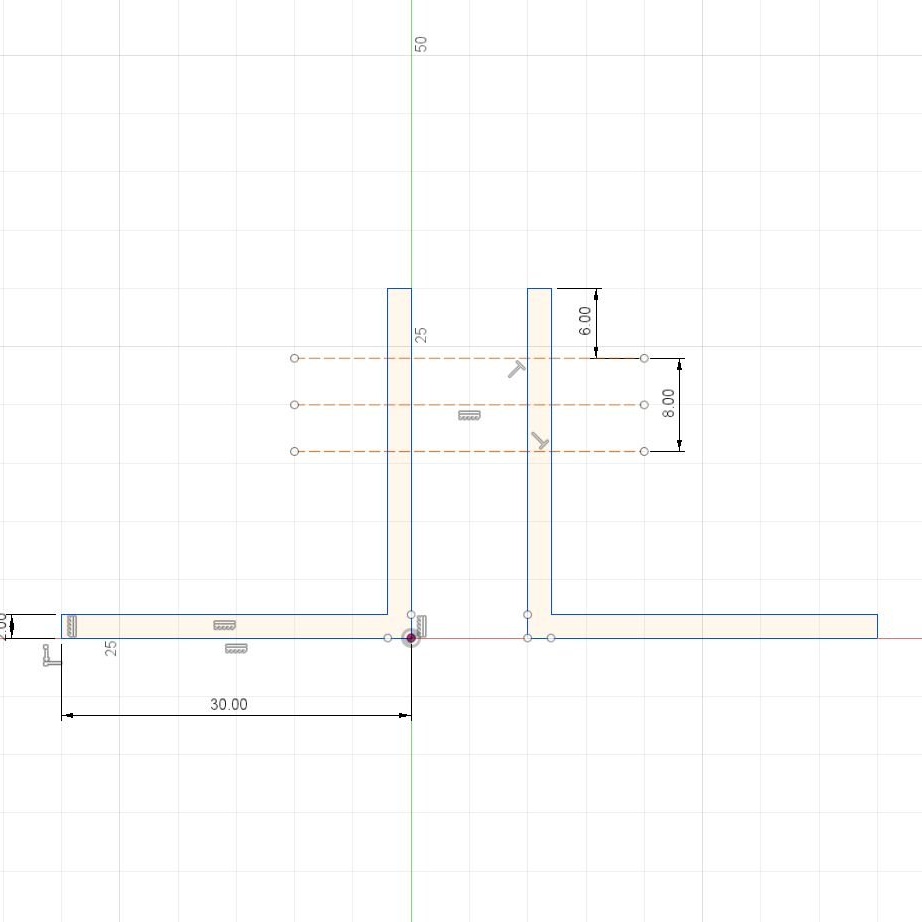
Paso seis: chasis
El chasis estaba hecho de perfiles de aluminio de 25 x 25 mm y un espesor de 3 mm. Todas las partes fueron soldadas, y sus tamaños se pueden ver en la foto. La idea era montar el chasis fuera de la canasta en un ángulo de 30 grados. Para evitar daños al chasis, los cables de soporte se tiran entre ellos.


Paso siete: Perfiles de soporte de soporte
Después de instalar los motores, los perfiles de soporte comenzaron a doblarse. Entonces el maestro intentó arrancar el motor y descubrió que los perfiles "caminan". Era necesario fortalecer el diseño.
Agregar placas agregaría demasiado peso a la estructura. Luego, el maestro decidió hacer un diseño en forma de V desde la cesta hacia abajo. Las cuerdas están unidas a su parte inferior. Los otros extremos de los cables están unidos a los soportes en el medio de los perfiles de soporte. Los cables se tiran con un polipasto. Por lo tanto, la estructura se vuelve rígida.















Paso ocho: conectar
Primero, el maestro suelda los conectores a los extremos de los cables.


Entonces comienza la instalación. Cada motor tuvo que ser verificado para la dirección de rotación. Si es necesario, es fácil cambiar la dirección de rotación del motor y, en consecuencia, el tornillo, intercambiando dos de los tres cables que vienen del ESC al motor. Después de que todos los motores se conectaron correctamente, el asistente realizó la instalación de acuerdo con el diagrama de conexión del fabricante.
Los controladores de vuelo IMU DJI A3 son muy sensibles a la interferencia de metales, y el maestro no pudo configurar el sistema debido a la interferencia. Como resultado, el maestro reemplazó A3 con el Naza M V2, que tenía un esquema de conexión similar. Naza M V2 funcionó de manera muy confiable.
Entonces el asistente conecta las baterías. En cada perfil de soporte, dos baterías de 22.2 V están conectadas en serie.



Paso nueve: asiento del piloto
El asiento fue cosido de tela duradera. Además, se adjunta un cinturón de seguridad al piloto, que se adjunta al marco, y un casco.






Paso diez: primer vuelo
Antes del vuelo del piloto en el octocóptero, se realizaron varias pruebas con una bolsa de arena y luego con el modelo de una persona. Durante el vuelo, se simularon varias situaciones, desde la pérdida de control hasta una ráfaga de viento.
Después de todas las pruebas, el piloto finalmente voló en el aire.






Antes de volar, debes realizar las siguientes acciones.
Compruebe la estanqueidad de los pernos, cables, montaje del motor.
Verifique el cableado.
Verifique que los tornillos giren fácilmente.
Asegúrese de que todos los ESC estén desactivados.
Asegúrese de que todas las baterías estén conectadas y cargadas de forma segura.
Conecte la alimentación al controlador de vuelo para la inicialización y la calibración.
Después de conectarse al GPS, cambiará al modo completamente automático (Alt. + Att. Hold).
Siéntate en el asiento del piloto y abróchate el cinturón.
Conecte todas las baterías al ESC.
Conecte las dos baterías en serie (ESC-RB-RB-ESC) usando una resistencia para eliminar la chispa.
Encienda los motores girando el interruptor a la posición de encendido.
Use el controlador para controlar el octocopter.