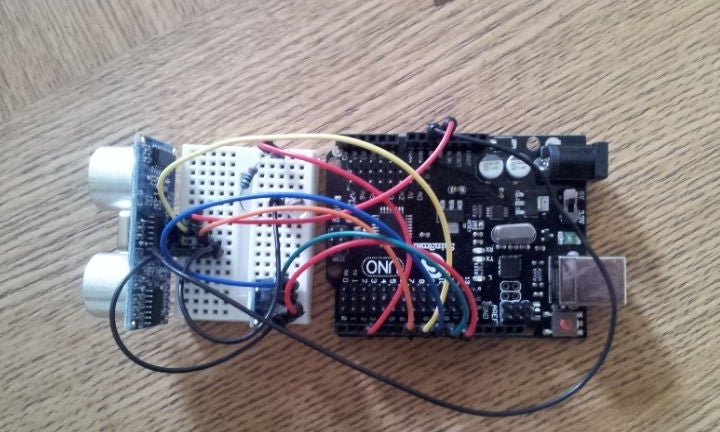
Los fabricantes de electrónica están llegando gradualmente a la conclusión de que el mejor control remoto es la palma del usuario. Entonces, en la nueva columna "Yandex.Station Mini" proporciona dicha gestión. No te apartes de las tendencias y amigos. Por ejemplo, al autor de Instructables bajo el apodo dan_nicholson se le ocurrió un dispositivo simple que le permite controlar su televisor con gestos. Por defecto, está programado para funcionar con televisores Sony, pero también se puede configurar para controlar cualquier otro televisor, centro de música, etc. Como se puede ver en KDPV, consiste
hecho en casa del buscador de rango
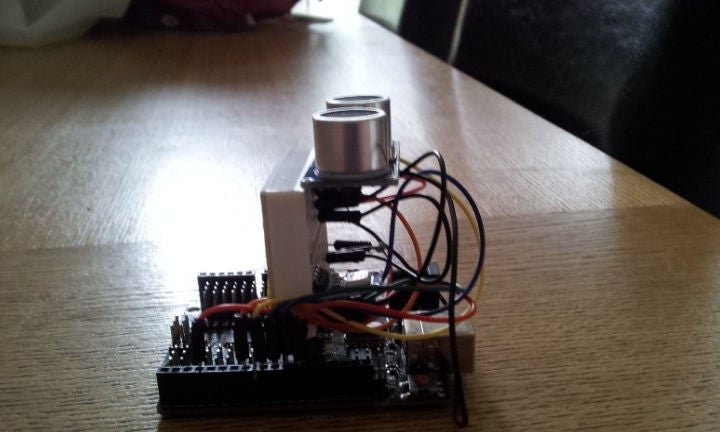
Arduino y varios componentes adicionales. Se puede hacer aún más compacto:
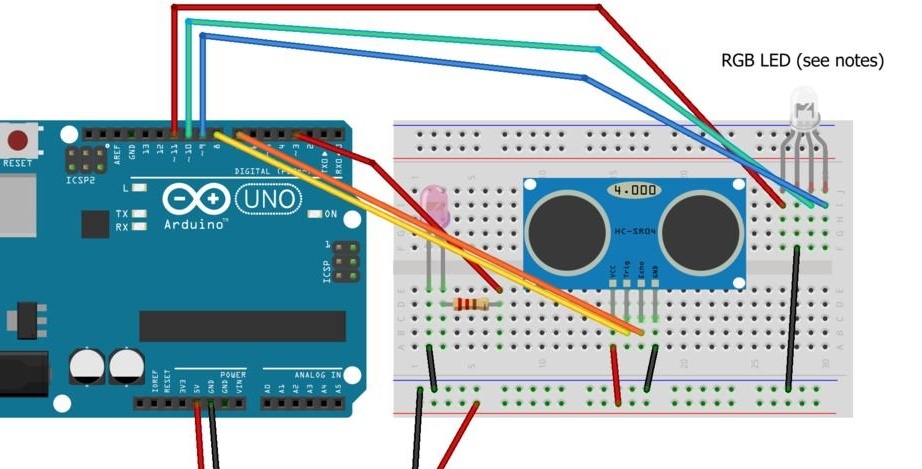
Y aún más compacto si abandonas la placa y conectas todo soldando con cables. El maestro crea un diagrama de dispositivo en el programa Fritzing, que no le gusta a todos, pero no se apresura a lanzar zapatillas, este método de elaboración de diagramas también puede ser conveniente. El maestro conecta un LED infrarrojo a través de una resistencia, y todos los cristales del LED RGB están conectados directamente. Él escribe que las resistencias también son deseables aquí, pero de hecho son necesarias.
Habiendo ensamblado el circuito, el maestro toma la biblioteca
aqui, y los códigos de comando son
aquiescribe y llena el boceto:
/ * Control remoto deslizante
Este boceto utiliza un telémetro ultrasónico para determinar el gesto del usuario y envía una señal IR a un televisor Sony en función del comando dado.
- Deslizamiento alto (> 10 pulgadas) = Canal arriba
- Deslizamiento bajo = Canal abajo
- Alta retención (> 10 pulgadas) = Subir volumen
- Baja retención = Bajar volumen
- Sensor de cubierta (<3in) = Encender / Apagar
Creado por Dan Nicholson.
Este código de ejemplo está en el dominio público.
Este código usa la biblioteca IRremote (https://github.com/shirriff/Arduino-IRremote)
* /
#include
// Define para funciones de control
#define CONTROL_CH 1 // Cambio de canal
#define CONTROL_VOL 2 // Volumen
#define CONTROL_POW 3 // Power
#define CONTROL_UP 1
#define CONTROL_DOWN -1
#define DIST_MAX 20 // Distancia máxima en pulgadas, todo lo anterior se ignora.
#define DIST_DOWN 10 // Umbral para los comandos arriba / abajo. Si es superior, el comando está "arriba". Si es inferior, "abajo".
#define DIST_POW 3 // Umbral para el comando de encendido, más bajo que = encendido / apagado
// PIN IR
const int irPin = 3; // esto se define en la biblioteca, esta var es solo un recordatorio. CAMBIAR ESTO NO CAMBIARÁ EL PIN EN LA BIBLIOTECA
// Sensor de ping de 2 pines
const int pingPin = 8;
const int echoPin = 7;
// Pines LED de confirmación
const int led = 13; // LED interno para depuración arriba / abajo
const int ledR = 11;
const int ledG = 10;
const int ledB = 9;
// LED en temporizador
temporizador largo sin signo;
// objeto transmisor IR
IRsend irsend;
// Indicador de confirmación de energía (necesita dos golpes para enviar la señal)
boolean powerConfirmed = false;
configuración nula () {
// inicializa la comunicación serial y establece los pines
Serial.begin (9600);
pinMode (led, SALIDA);
pinMode (ledR, OUTPUT);
pinMode (ledG, OUTPUT);
pinMode (ledB, OUTPUT);
pinMode (pingPin, OUTPUT);
pinMode (echoPin, INPUT);
temporizador = millis ();
}
bucle vacío ()
{
// Serial.println (millis ());
larga duración, pulgadas;
valor int;
// Verificar una lectura
duración = doPing ();
// Temporizador para confirmar acciones (actualmente solo energía)
if (temporizador && timer <(millis () - 5000) && (millis ()> 5000))
{
Serial.println ("reinicio del temporizador");
temporizador = falso;
}
digitalWrite (led, BAJO);
setColor (0, 0, 0); // apagado
// convierte el tiempo en una distancia
pulgadas = microsegundos a pulgadas (duración);
// Si está a menos de un máximo de pulgadas de distancia, actúa
if (pulgadas DIST_MAX)
{
doIR (CONTROL_CH, valor); // deslizar
}
otra cosa
{
// volumen
int d = 500; // primer retraso es más largo para el cambio de volumen único
// repite hasta que se quite la mano
while (pulgadas DIST_DOWN)
{
digitalWrite (led, ALTO);
volver CONTROL_UP;
}
otra cosa
{
digitalWrite (led, BAJO);
volver CONTROL_DOWN;
}
}
/ *
* Disparar código IR correcto
* /
anir doIR (int control, int val)
{
interruptor (control)
{
caso CONTROL_POW:
// poder
Serial.println ("encendido / apagado 0xa90");
para (int i = 0; i <3; i ++)
{
setColor (255, 0, 0);
irsend.sendSony (0xa90, 12); // Código de alimentación de Sony TV
retraso (40);
}
romper
caso CONTROL_CH:
setColor (0, 255, 0);
// salida 'canal arriba / abajo' dependiendo de val
if (val == CONTROL_UP)
{
digitalWrite (led, ALTO);
para (int i = 0; i <3; i ++)
{
irsend.sendSony (0x90, 12);
retraso (40);
}
Serial.println ("canal hasta 0xD00A");
}
más // abajo
{
para (int i = 0; i <3; i ++)
{
irsend.sendSony (0x890, 12);
retraso (40);
}
Serial.println ("canal inactivo 0x3002");
}
romper
caso CONTROL_VOL:
setColor (0, 0, 255);
// salida 'volumen arriba / abajo' dependiendo de val
if (val == CONTROL_UP)
{
digitalWrite (led, ALTO);
para (int i = 0; i <3; i ++)
{
irsend.sendSony (0x490, 12);
retraso (40);
}
Serial.println ("subir volumen 0x490");
}
más // abajo
{
para (int i = 0; i <3; i ++)
{
irsend.sendSony (0xC90, 12);
retraso (40);
}
Serial.println ("bajar volumen 0xC90");
}
romper
}
}
setColor vacío (int rojo, int verde, int azul)
{
analogWrite (ledR, rojo);
analogWrite (ledG, verde);
analogWrite (ledB, azul);
}
DoPing largo ()
{
digitalWrite (pingPin, LOW);
delayMicroseconds (2);
digitalWrite (pingPin, HIGH);
delayMicroseconds (5);
digitalWrite (pingPin, LOW);
return pulseIn (echoPin, HIGH);
}
microsegundos largos a pulgadas (microsegundos largos)
{
// Según la hoja de datos de Parallax para el PING))), hay
// 73.746 microsegundos por pulgada (es decir, el sonido viaja a 1130 pies por
// segundo). Esto da la distancia recorrida por el ping, saliente
// y regresamos, entonces dividimos por 2 para obtener la distancia del obstáculo.
// Ver: http://www.parallax.com/dl/docs/prod/acc/28015-PING-v1.3.pdf
retorno microsegundos / 74/2;
}
microsegundos largos a centímetros (microsegundos largos)
{
// La velocidad del sonido es 340 m / so 29 microsegundos por centímetro.
// El ping viaja de ida y vuelta, así que para encontrar la distancia del
// objeto tomamos la mitad de la distancia recorrida.
retorno microsegundos / 29/2;
}
Una característica del programa es el envío de mensajes de depuración sobre lo que está sucediendo en este momento al monitor de puerto serie IDE de Arduino. Después de asegurarse de que todo funciona correctamente, en el futuro puede alimentar el dispositivo no desde la computadora, sino desde la fuente de alimentación.
El orden de envío de comandos:1. Encienda o apague el televisor: agite la palma de su mano frente al telémetro a una distancia de 0 a 75 mm, el LED RGB se iluminará de color púrpura durante 5 segundos, mientras está encendido, agite nuevamente a la misma distancia.
2. Disminuya el número de canal: oscile a una distancia de 75 (no incluido) a 250 mm. Zoom: igual, pero a una distancia de 250 (no incluido) a 500 mm.
3. Disminuya o aumente el volumen, lo mismo que con los canales, pero no agite, pero mantenga la palma inmóvil. Mientras el usuario sostiene su palma, el volumen, dependiendo de la distancia, disminuye o aumenta de acuerdo con la misma lógica que el número de canal.
Para usar el resto de las funciones (EPG, teletexto, entrada de graves, etc.), debe mantener un control remoto regular a su lado. En condiciones modernas, es aconsejable programar el dispositivo para controlar un decodificador estándar DVB-T2. En el caso del centro de música, todo es diferente: la transmisión analógica permanece por el momento, aunque en el futuro habrá una transición a la puesta en marcha DAB + o DRM +.
Después de depurar la estructura, debe colocarse en el cuerpo de cualquier estructura, desde la fabricación
hazlo tu mismo desde plexiglás, madera contrachapada, hasta cualquier caja terminada adecuada, por ejemplo, soldadura. Se deben proporcionar orificios en la carcasa para el telémetro, el cable y ambos LED. Es aconsejable dirigir el telémetro y el LED RGB en una dirección, y el diodo IR en la dirección opuesta.