
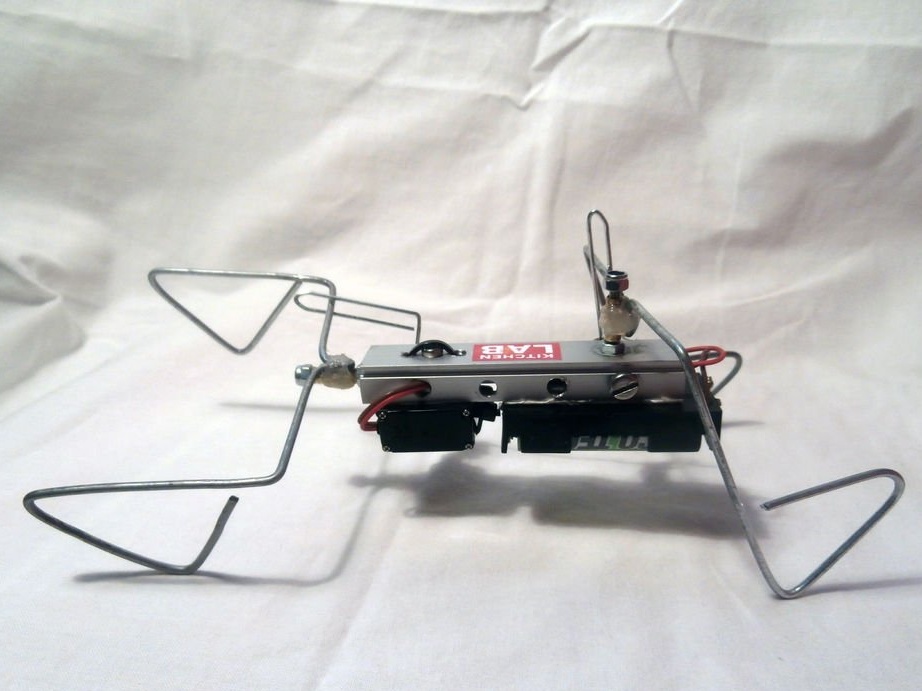
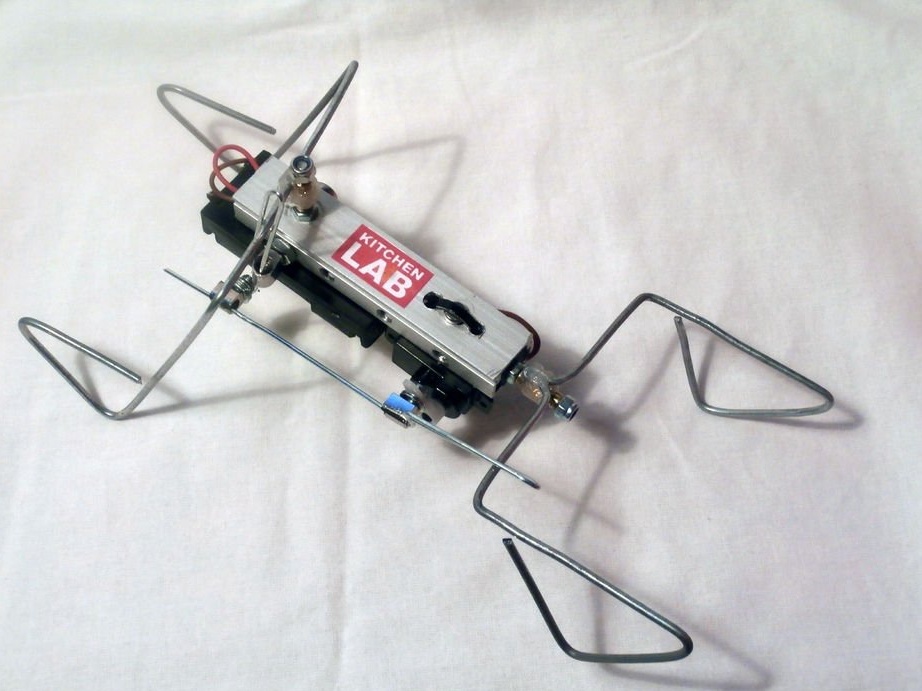
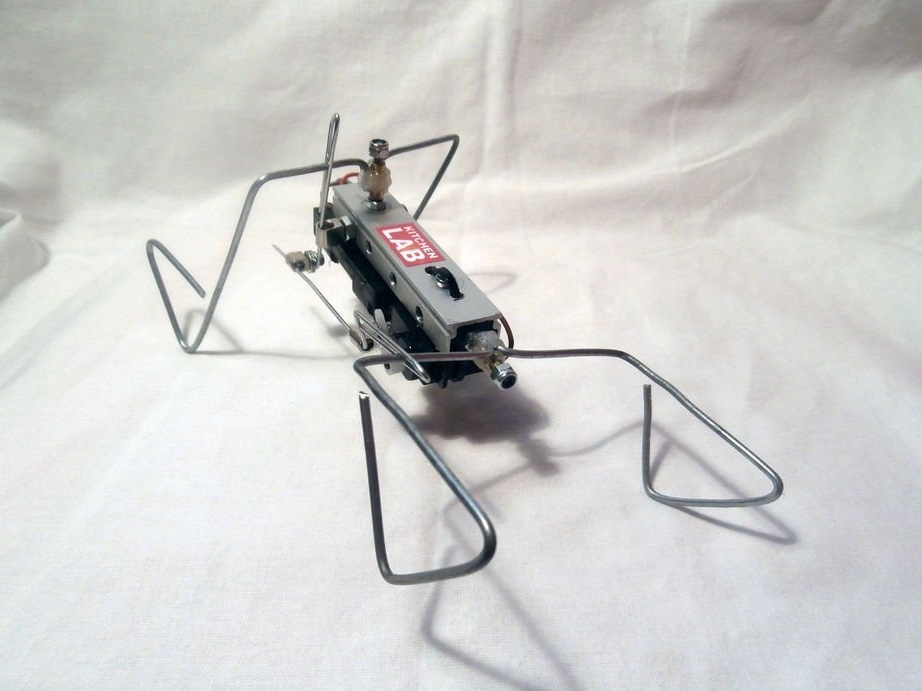
Hola a todos! Me inspiré para crear mi robot BEAM, habiendo visto suficientes maravillas de robótica de un solo motor y bimotor en Internet. La idea era crear un robot para caminar que se parezca a los andadores BEAM de 1 o 2 motores. ¡Después de varios experimentos fallidos, hice lo que quería!
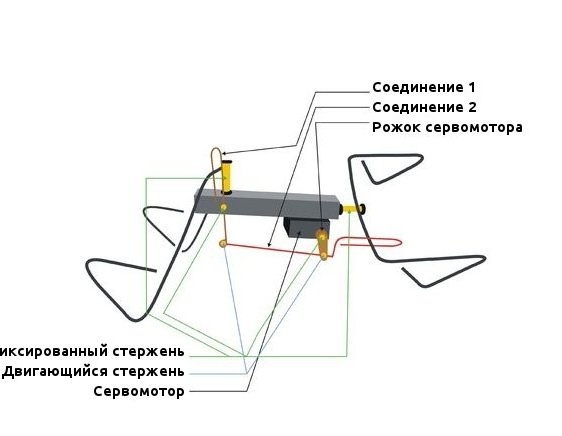
Paso 1: el mecanismo
Paso 2: piezas requeridas

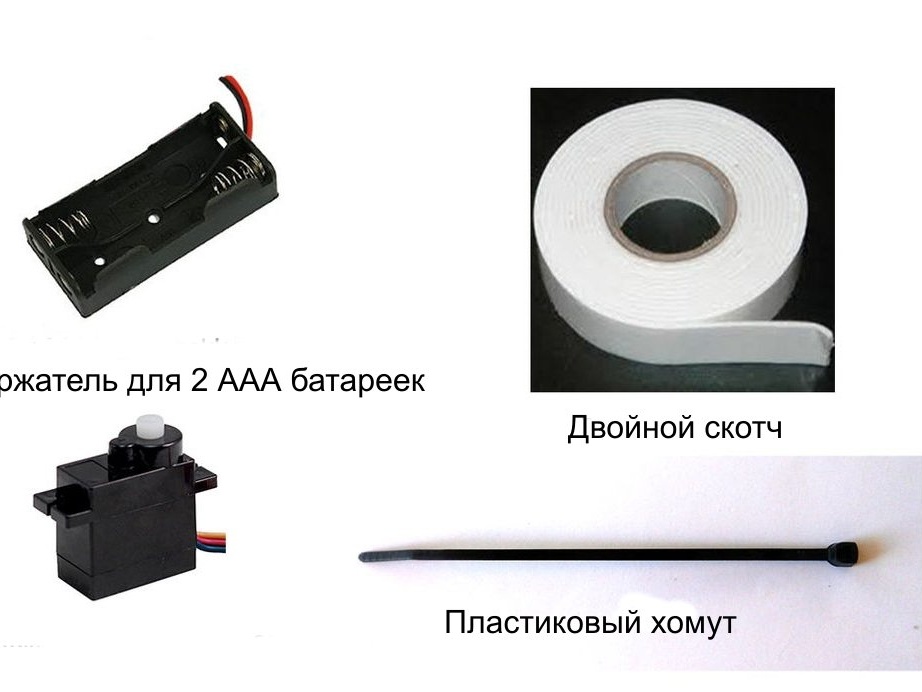



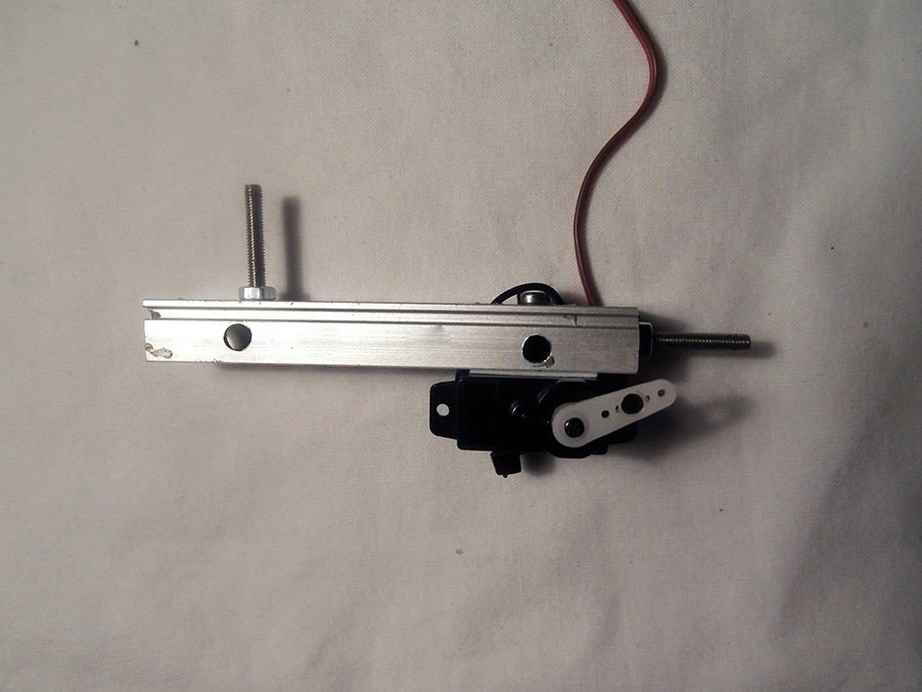
(1x) servo de rotación continua
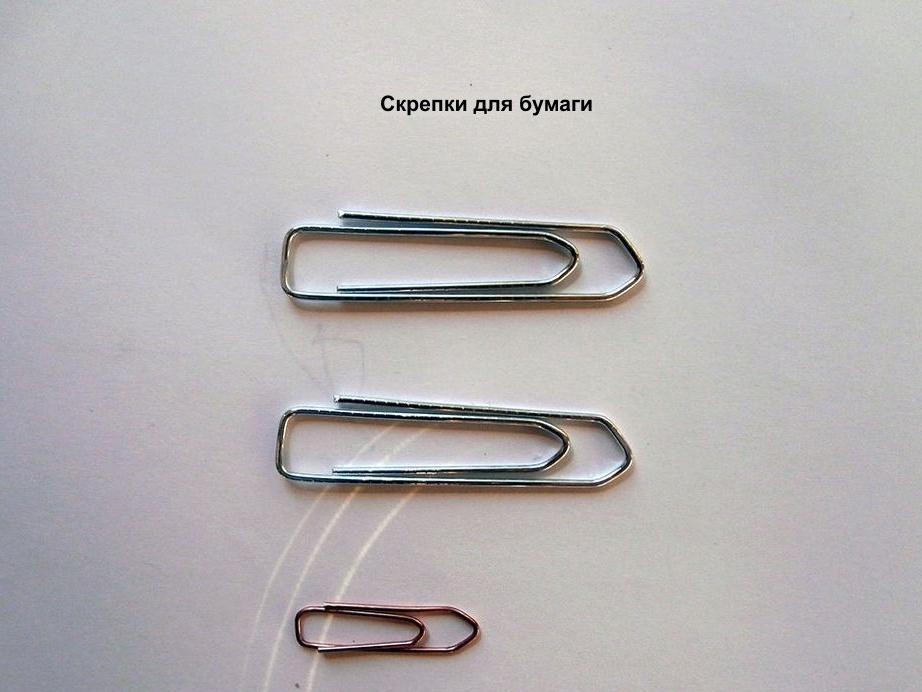
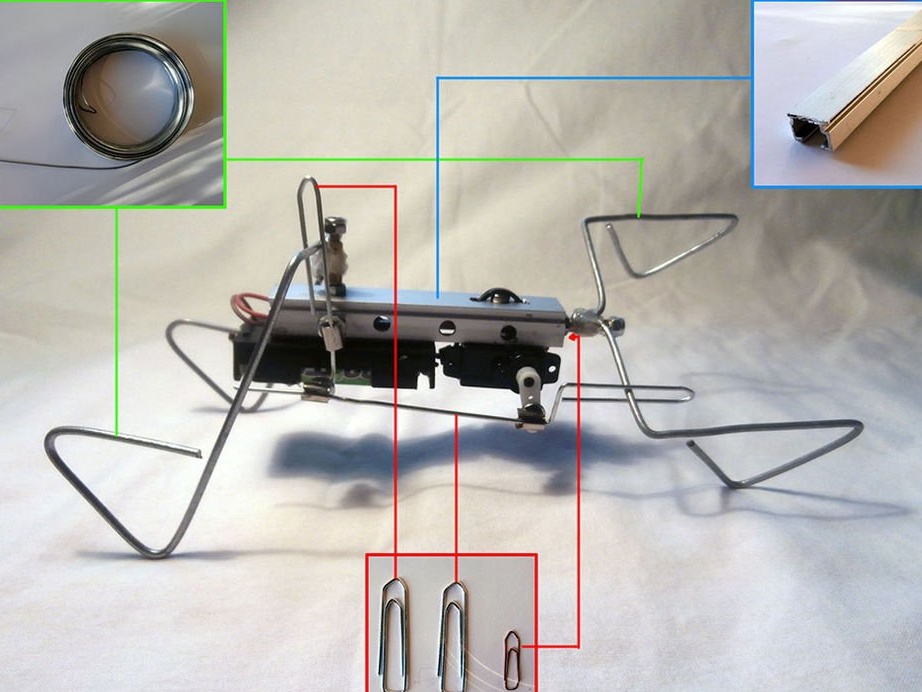
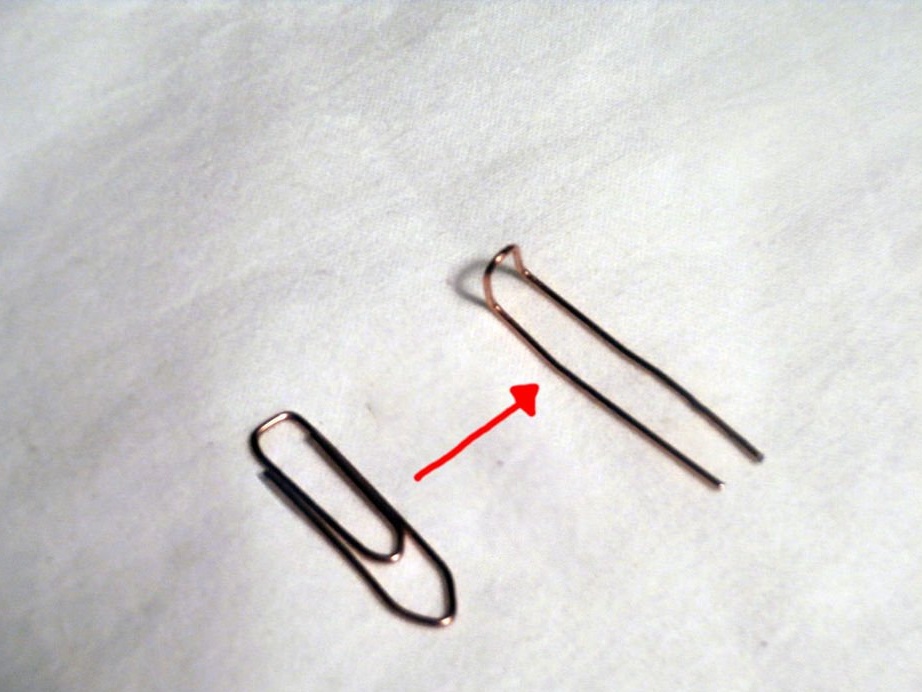
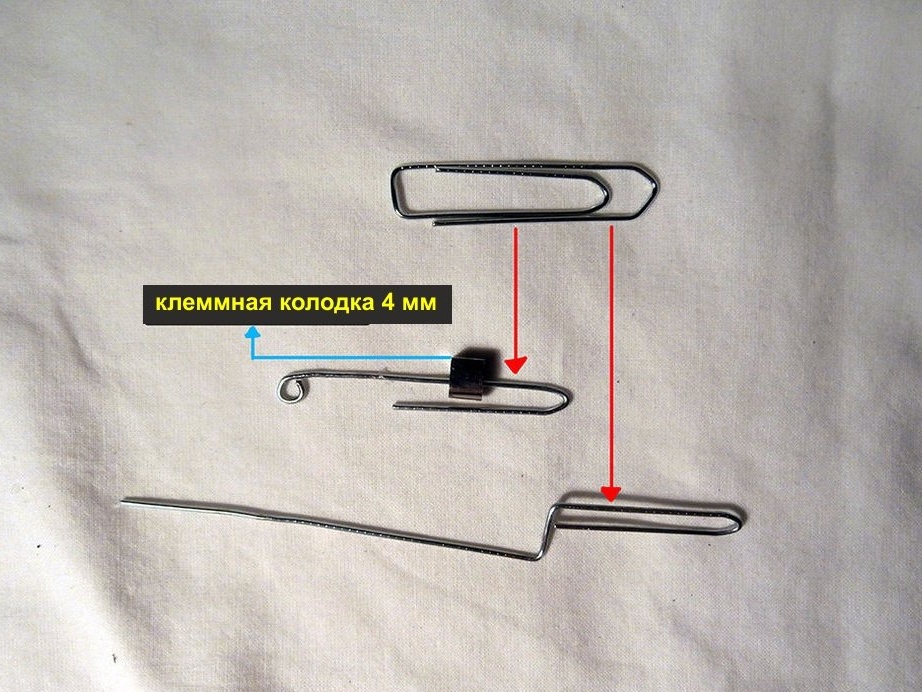
(2x) clips de papel grandes
(1x) clip de papel pequeño
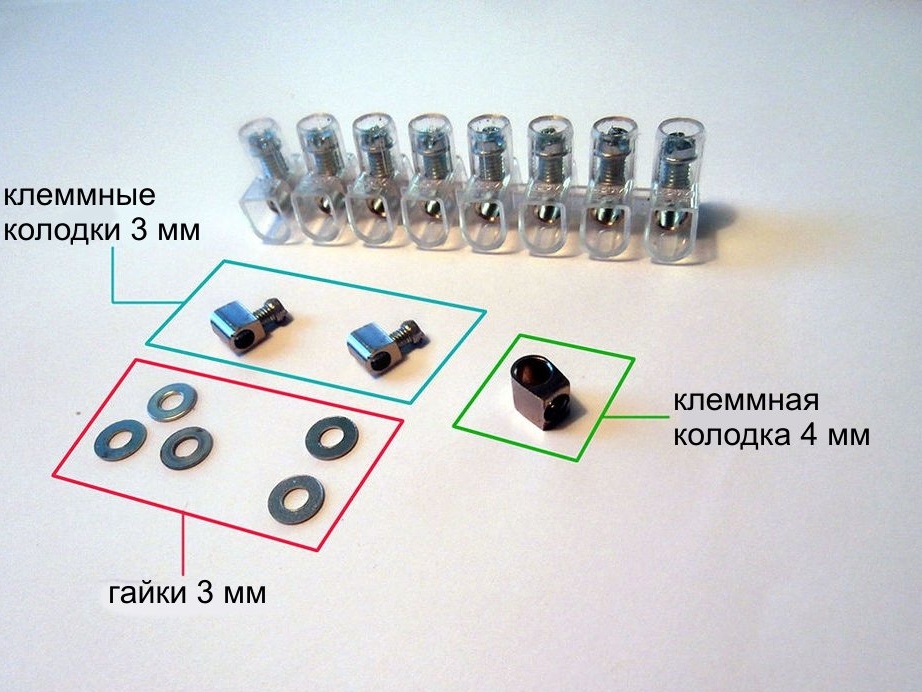
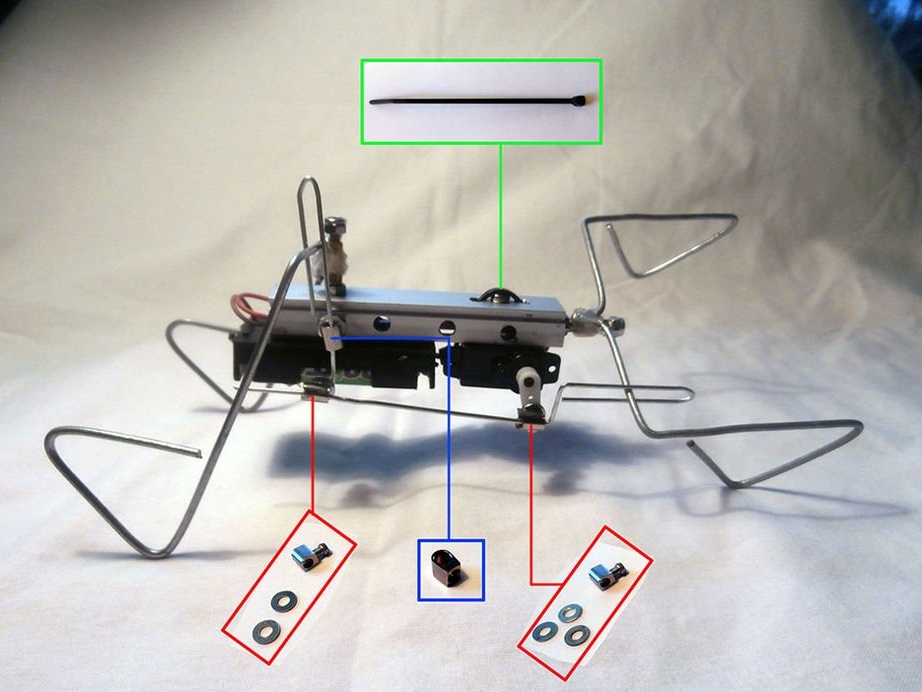
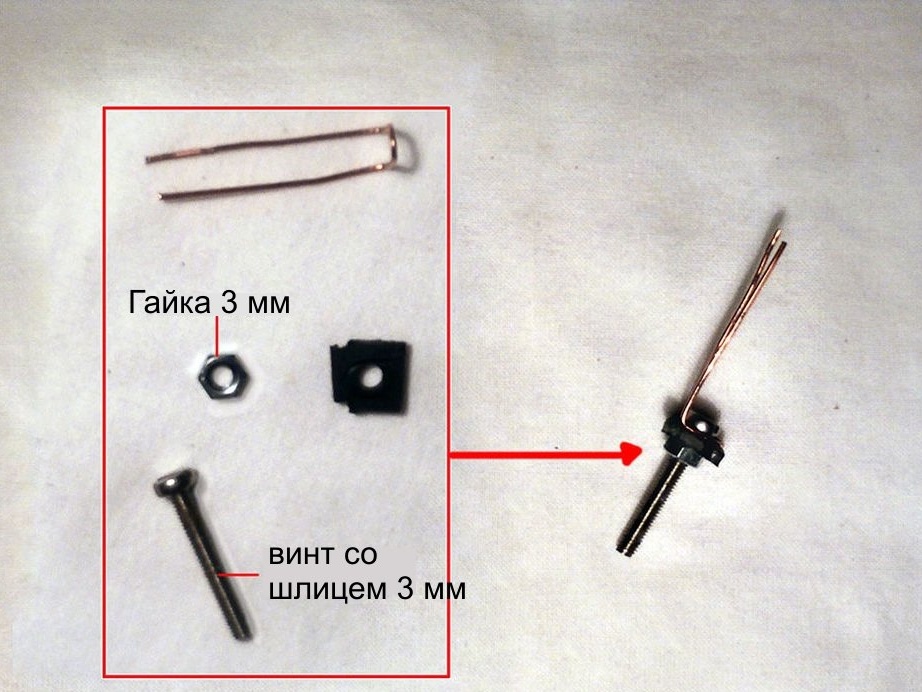
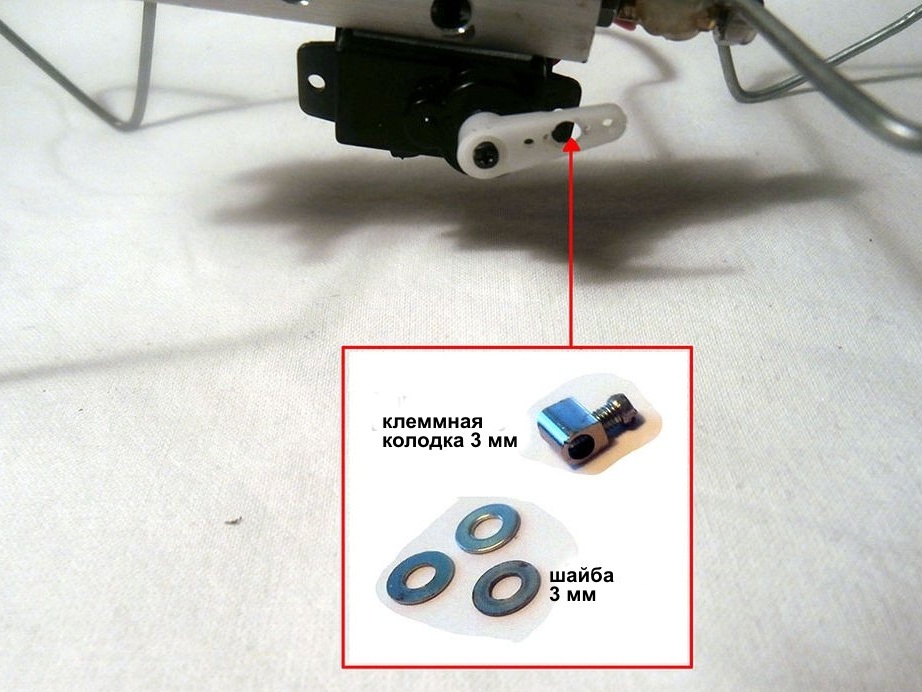
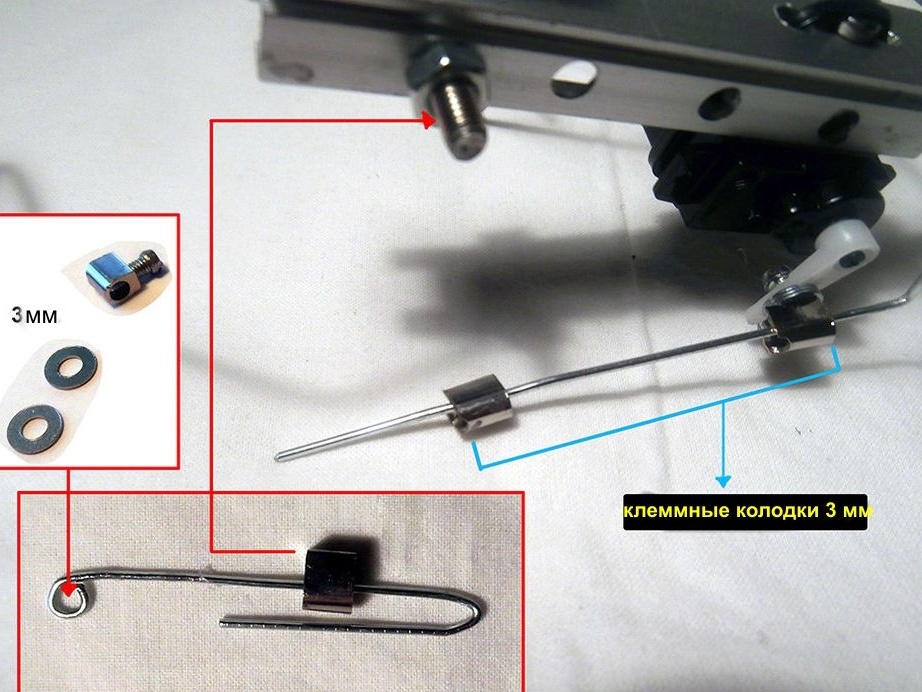
(2x) bloques de terminales (3 mm)
(1x) bloques de terminales (4 mm)
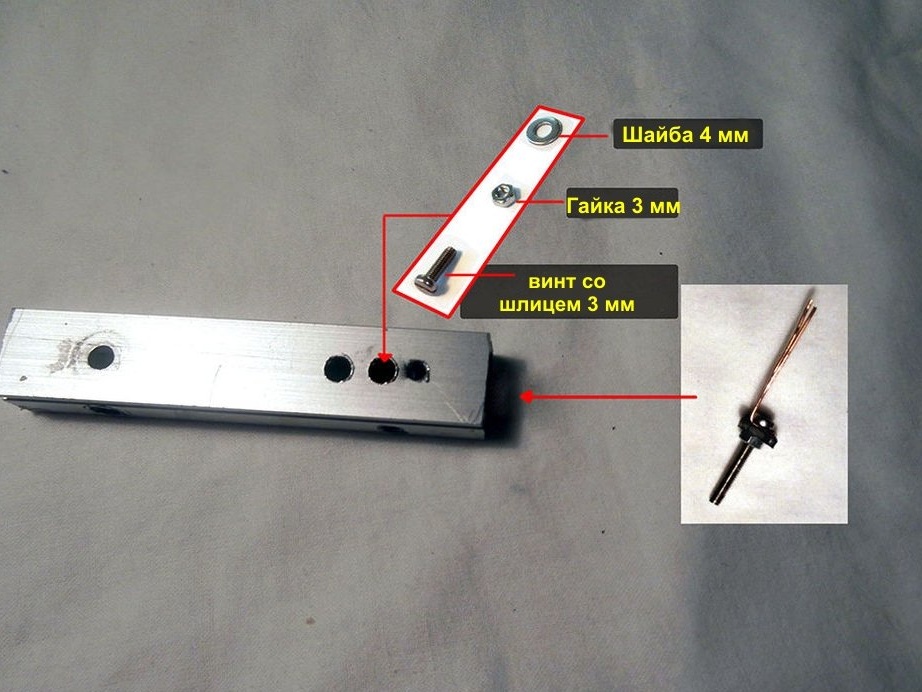
(1X) Bloque de perfil de aluminio usado
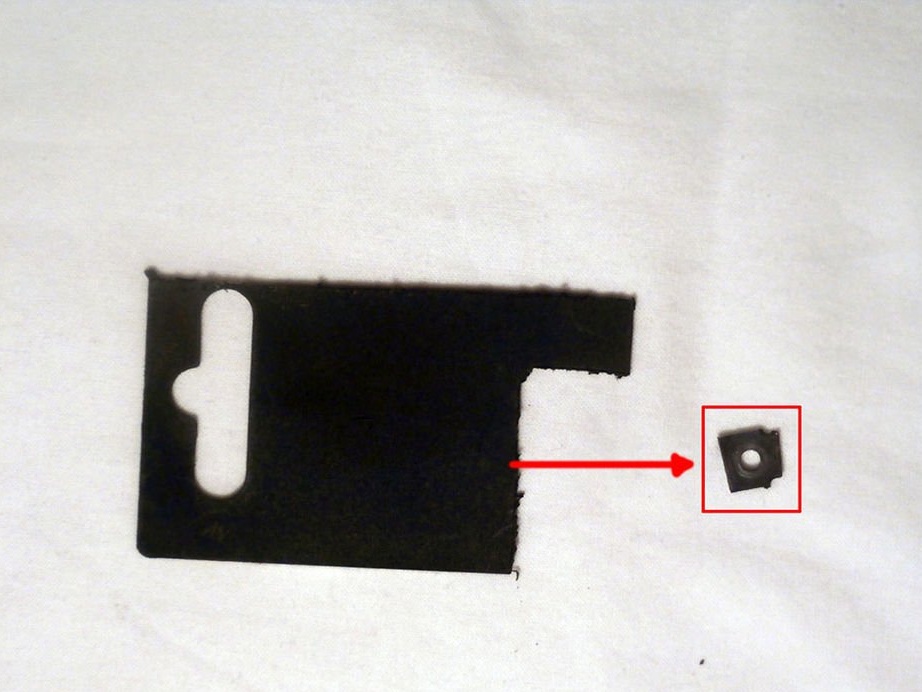
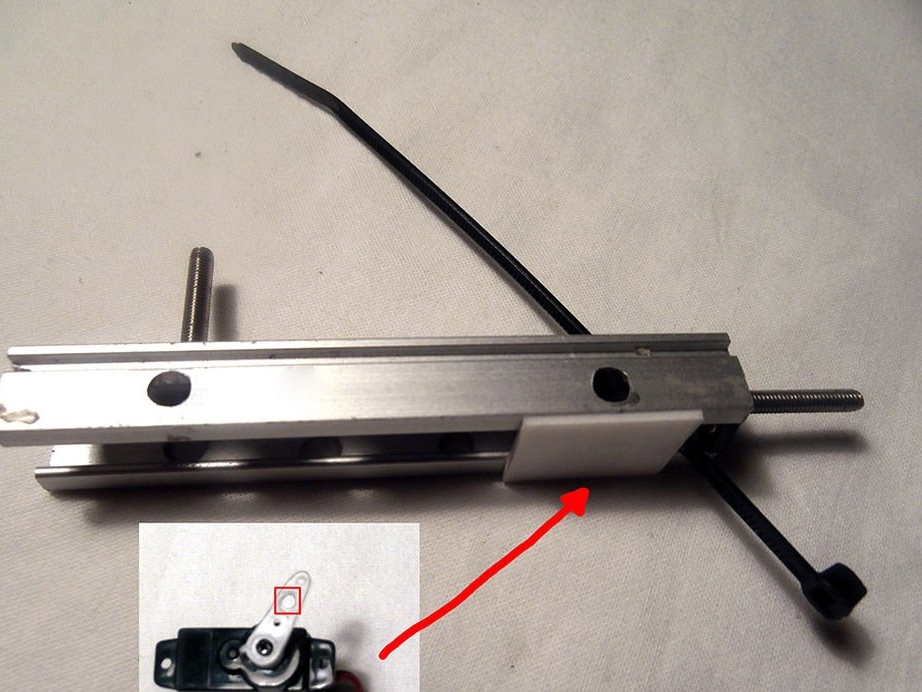
(1X) pieza de plástico
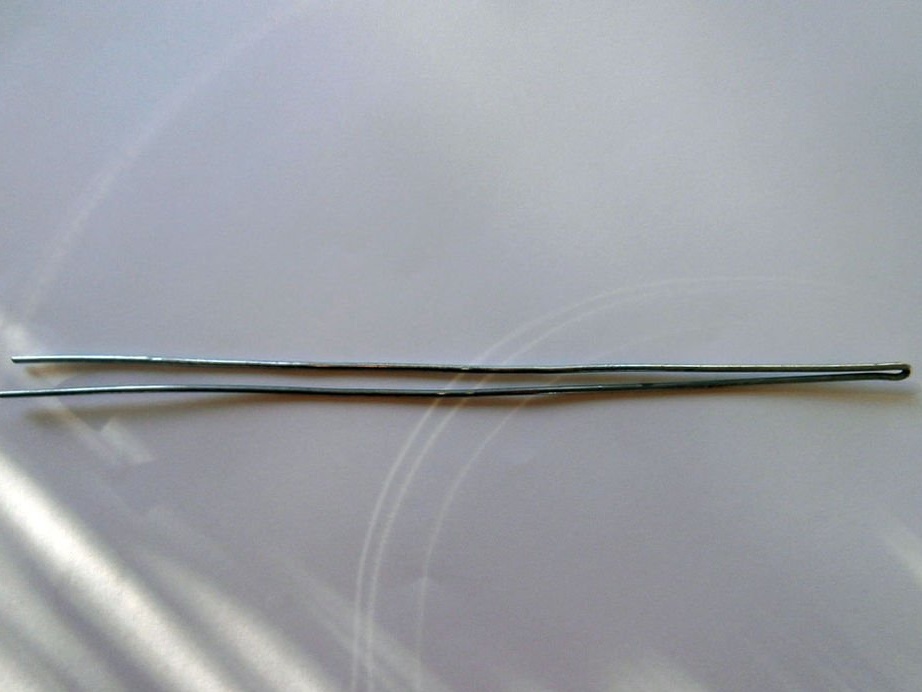
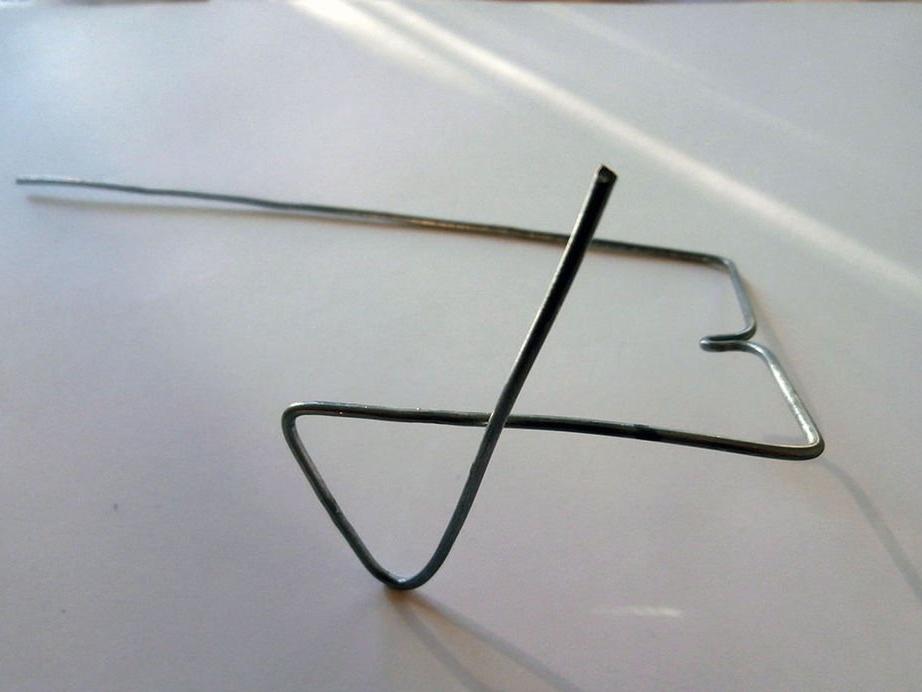
Alambre de acero (2 mm)
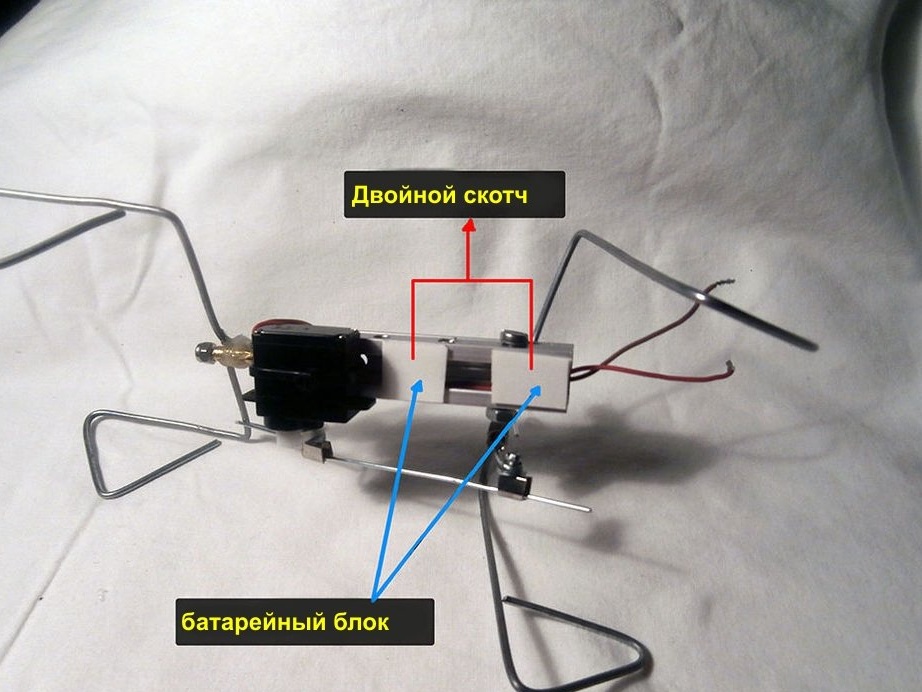
Cinta adhesiva doble
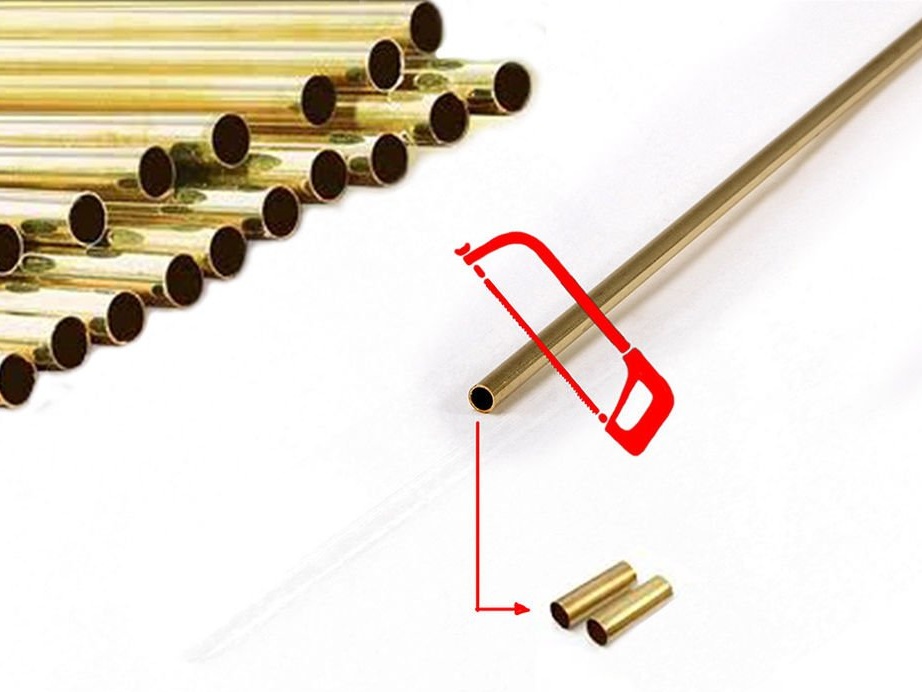
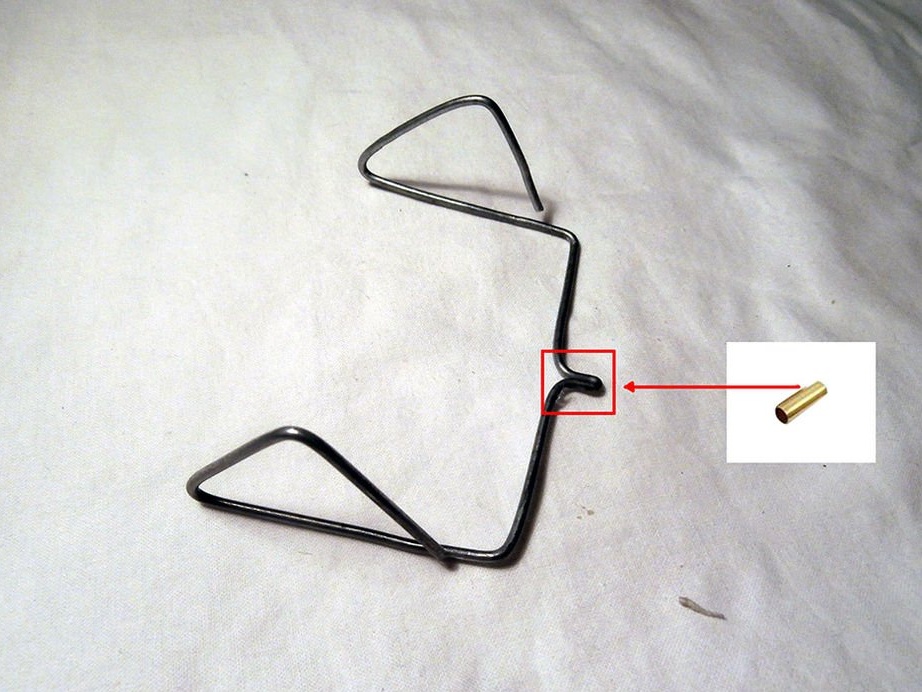
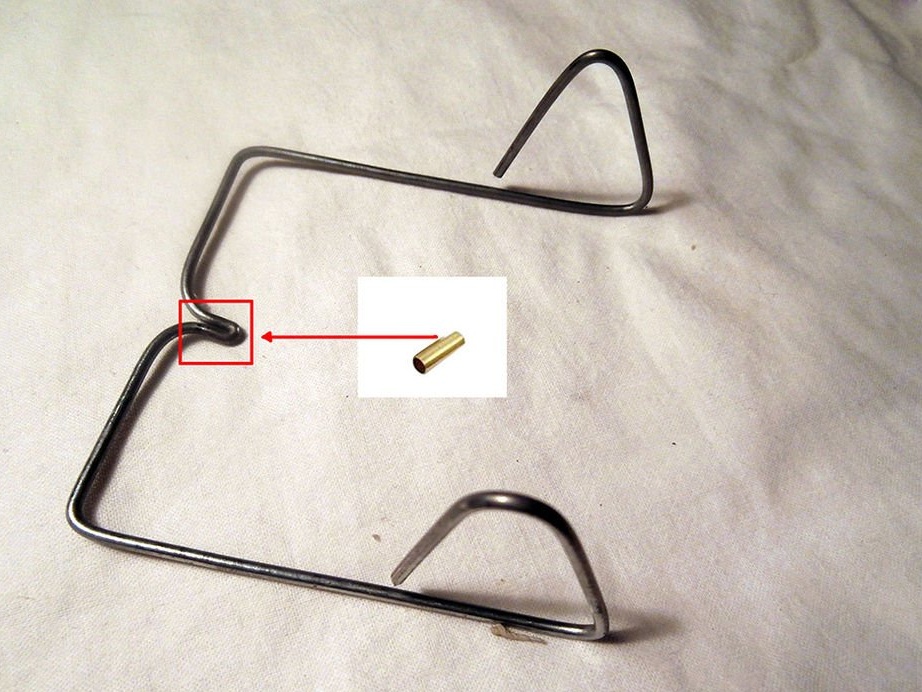
Tubo de latón
(1X) abrazadera pequeña
(1X) batería (2 x AAA)
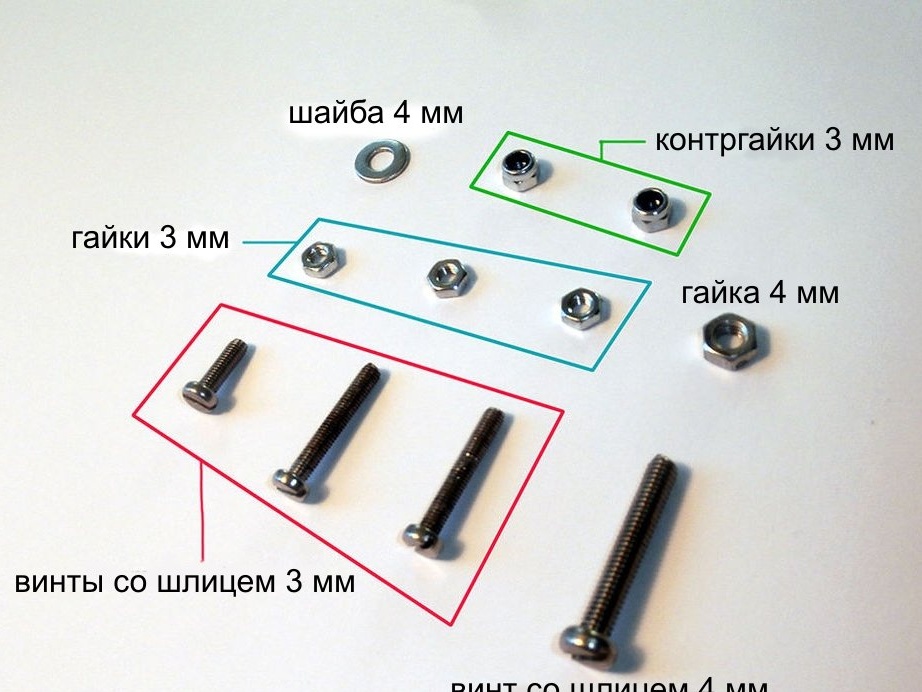
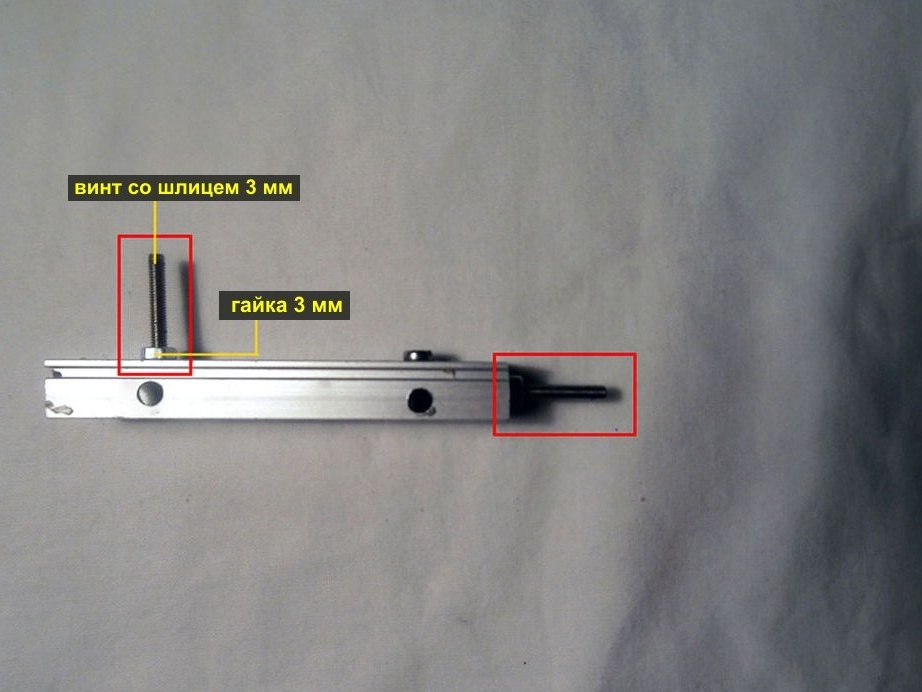
(2X) tuercas de seguridad (3 mm)
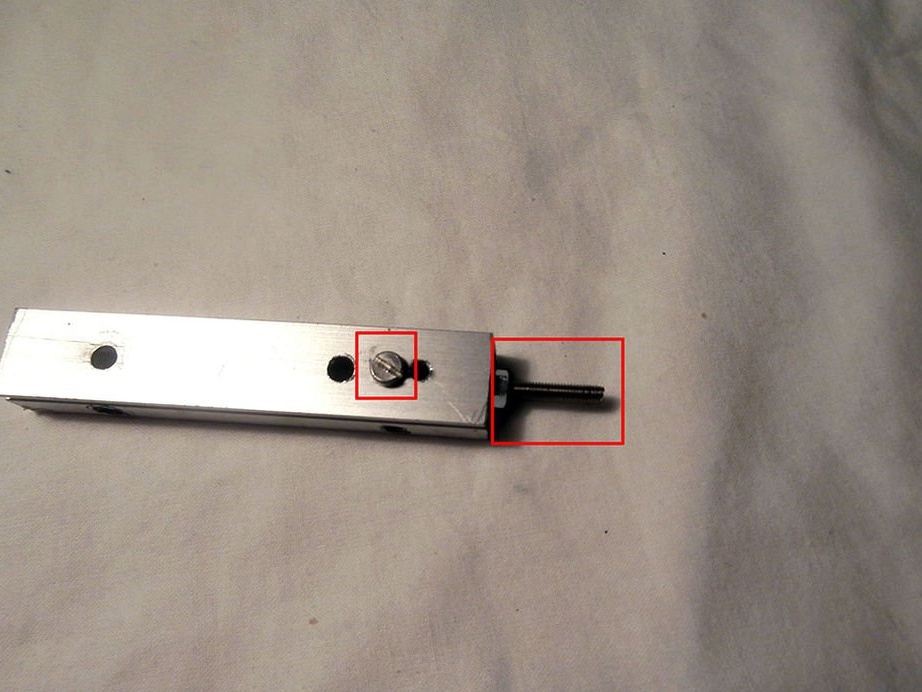
(3X) tuercas y tornillos (3 mm)
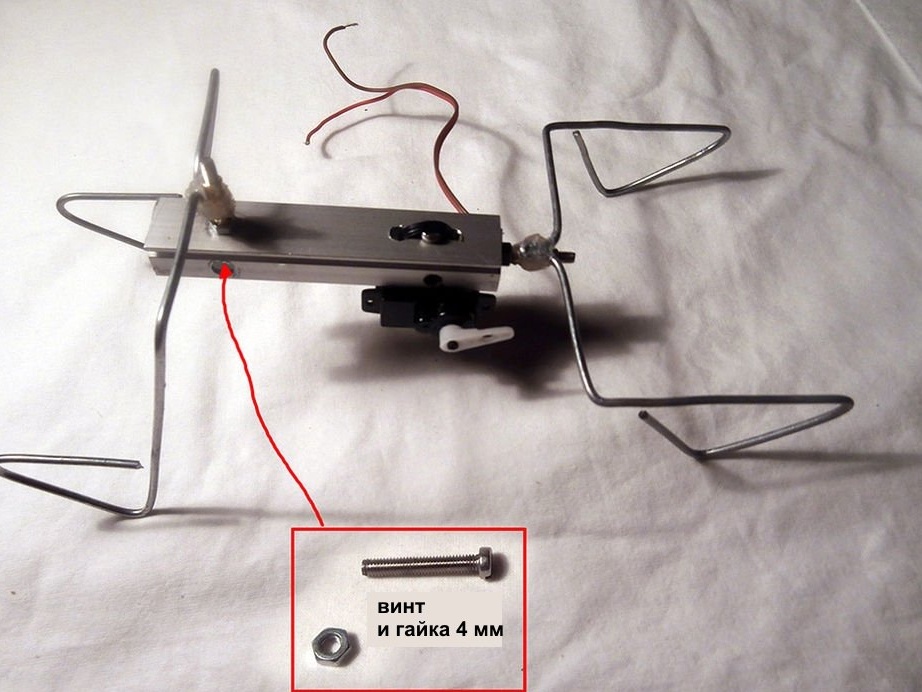
(1x) tuercas y tornillos (4 mm)
(5x) arandela (3 mm)
(1X) arandela (4 mm)
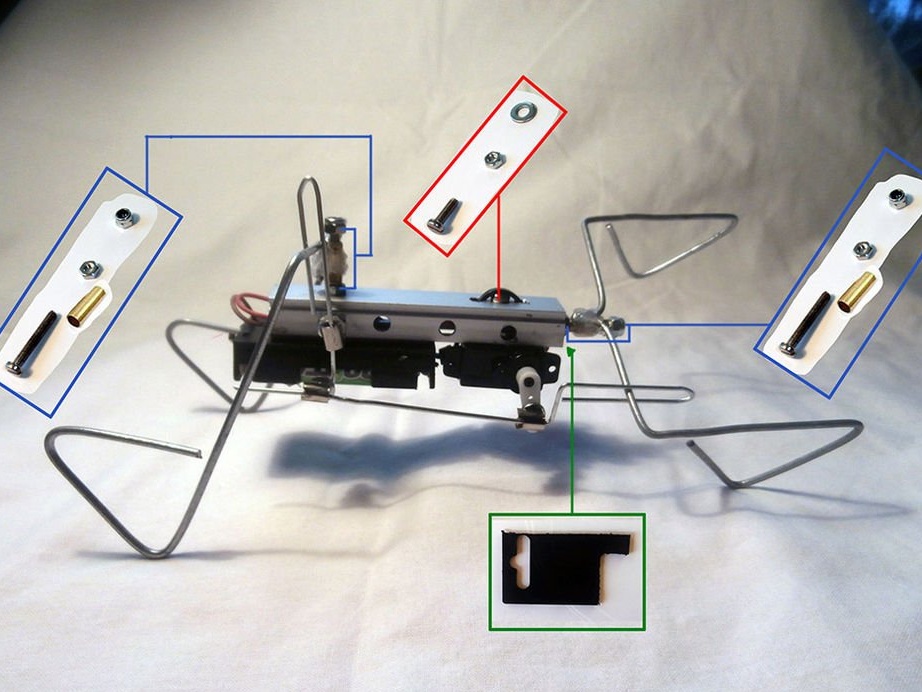
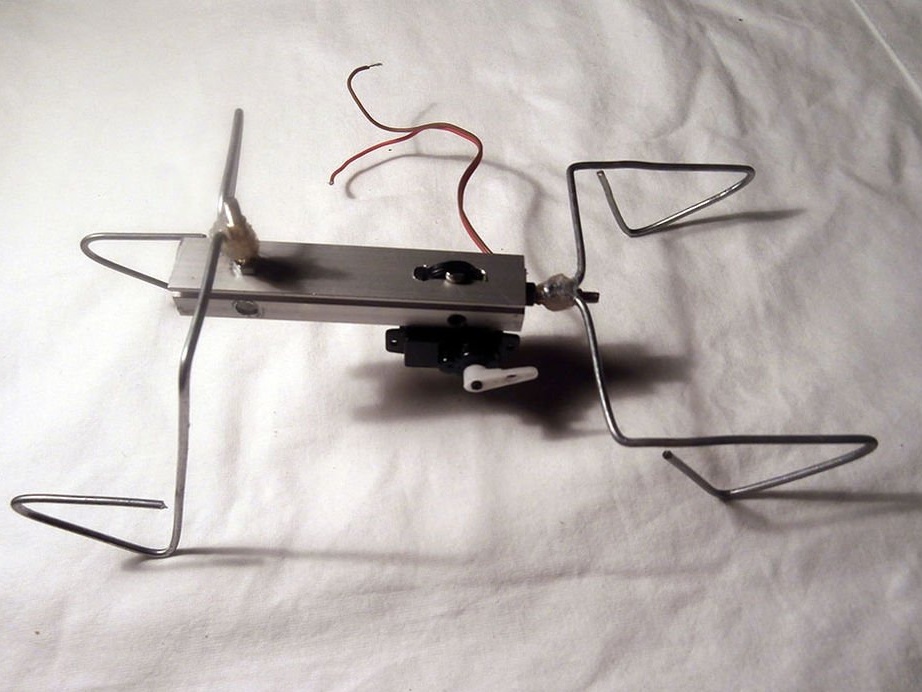
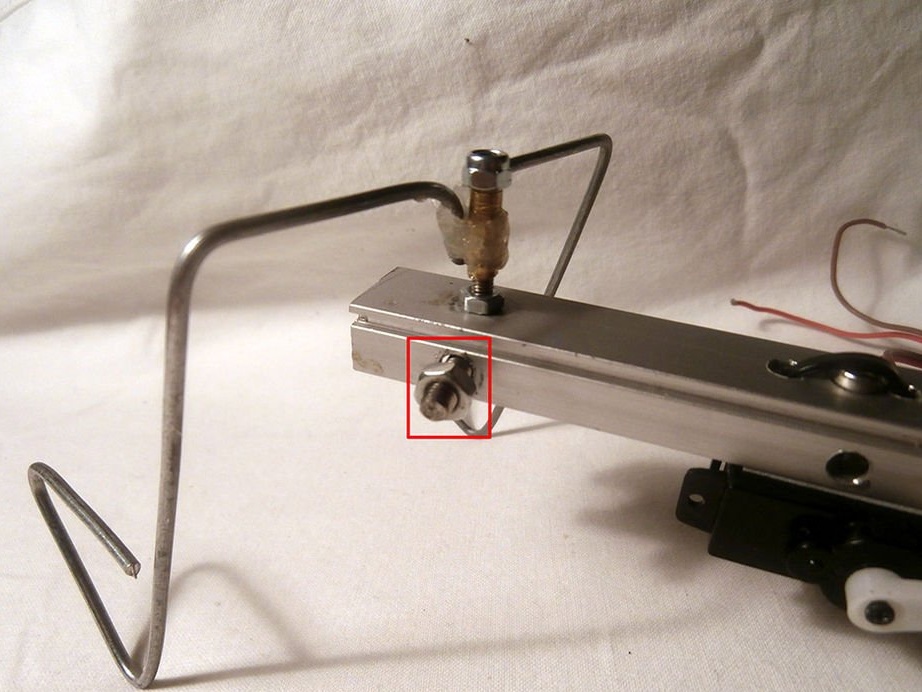
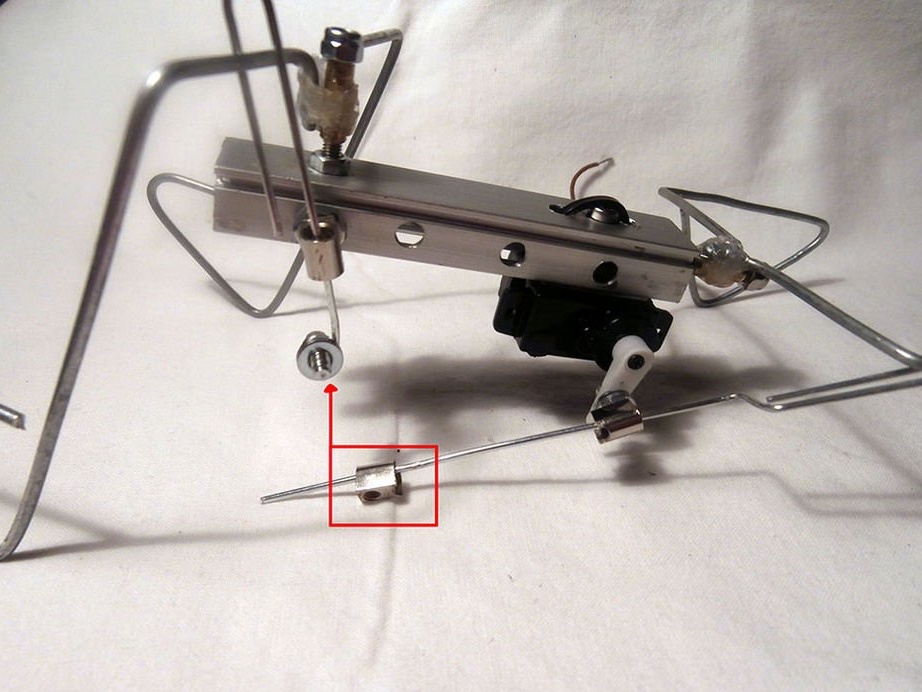
Paso 3: montaje de piezas
Paso 4: herramientas
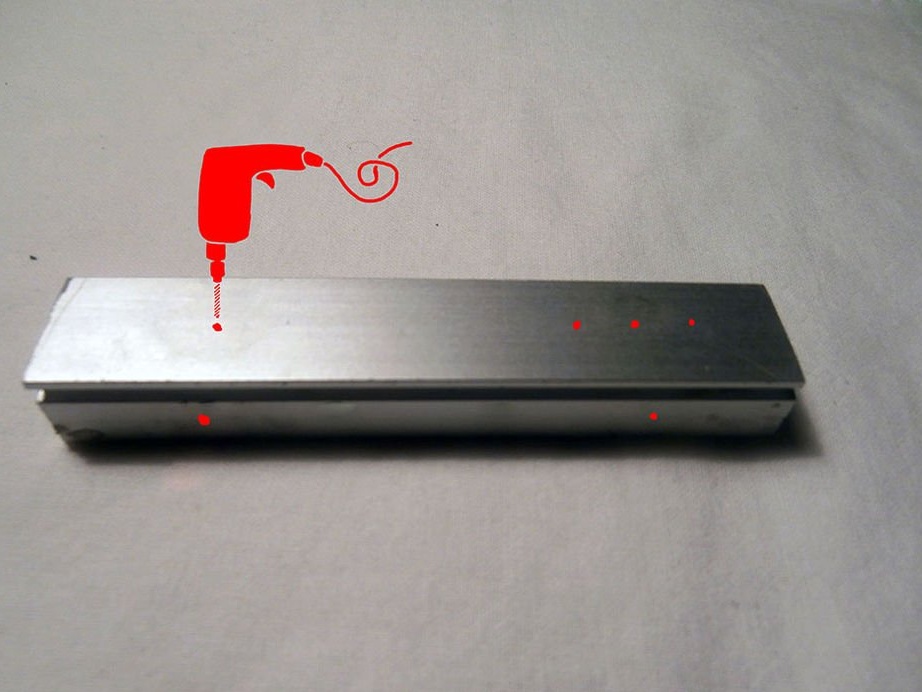
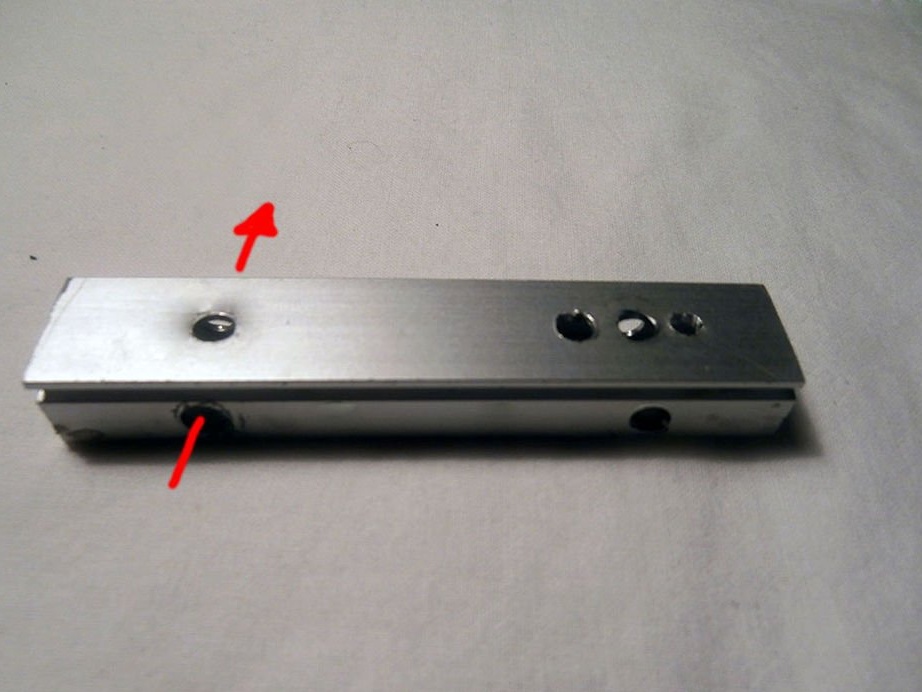
Paso 5: Vivienda


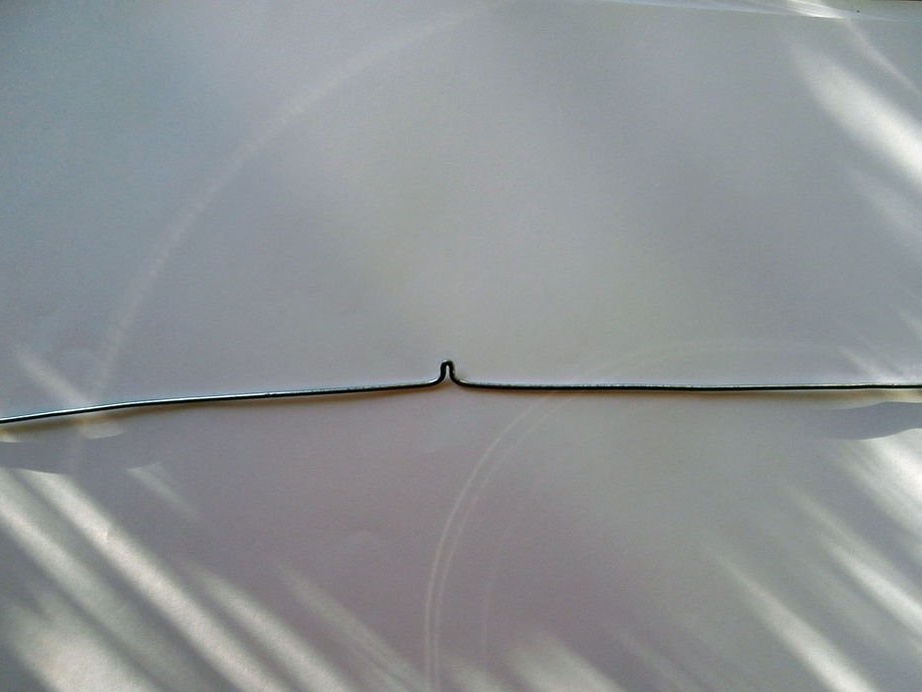
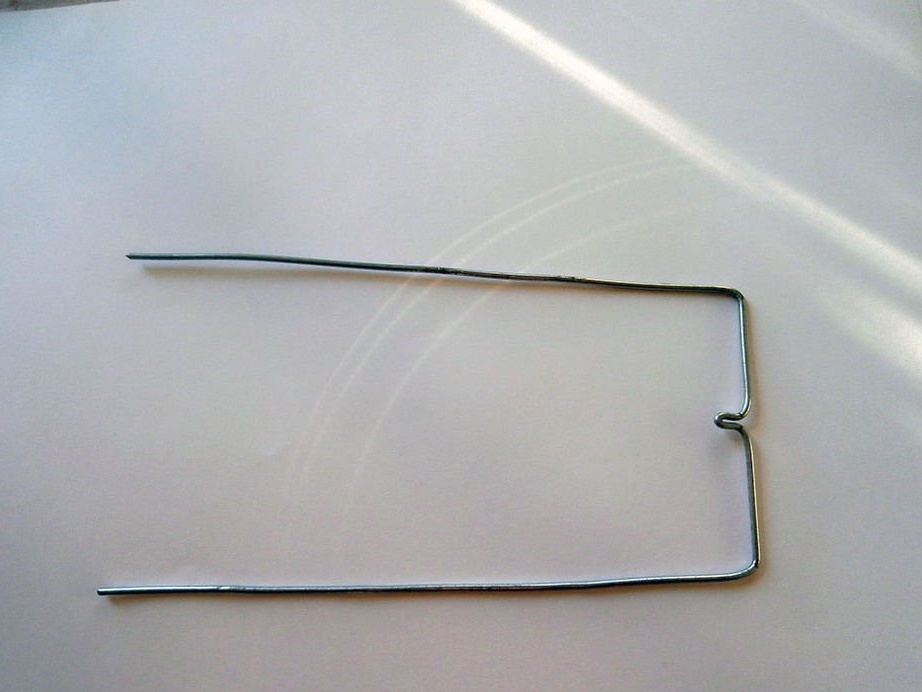
Paso 6: patas delanteras
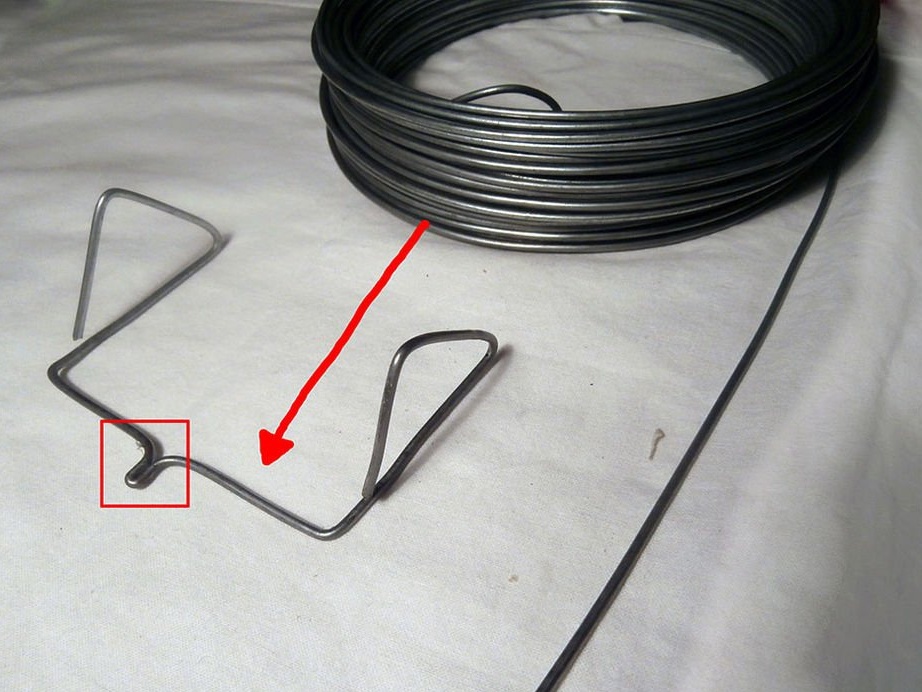
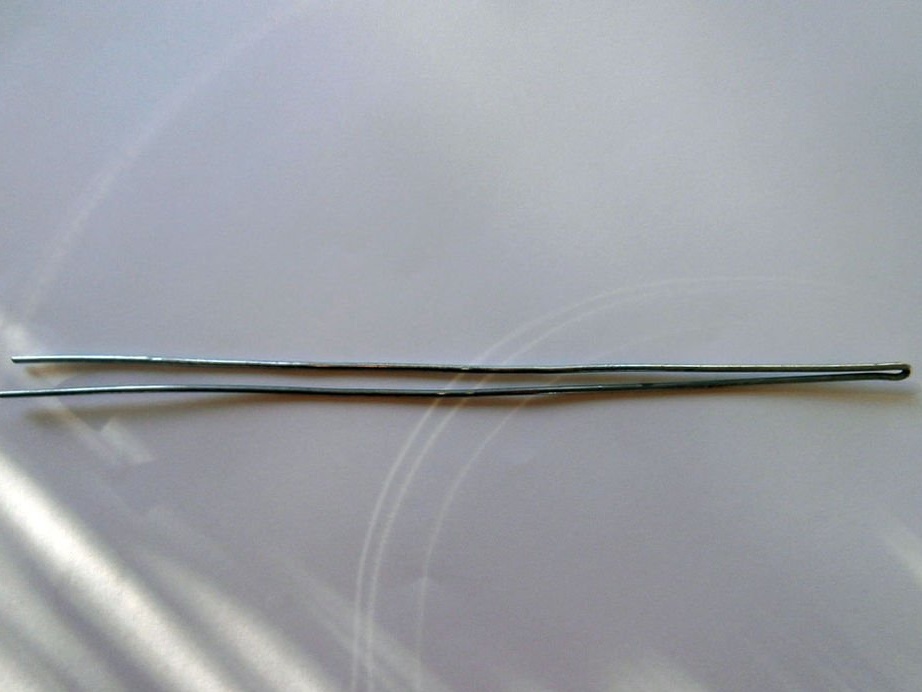
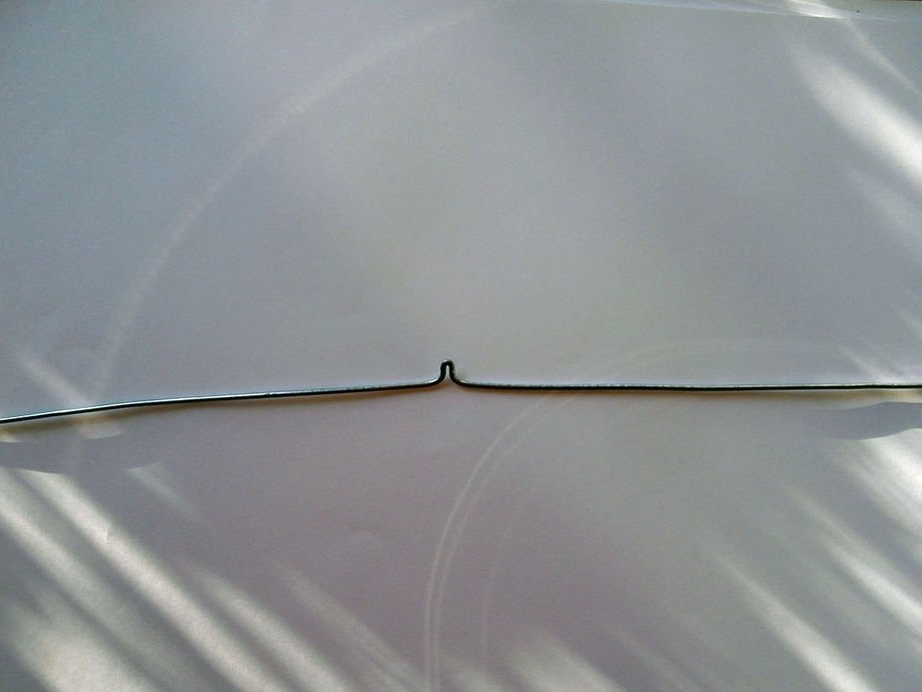
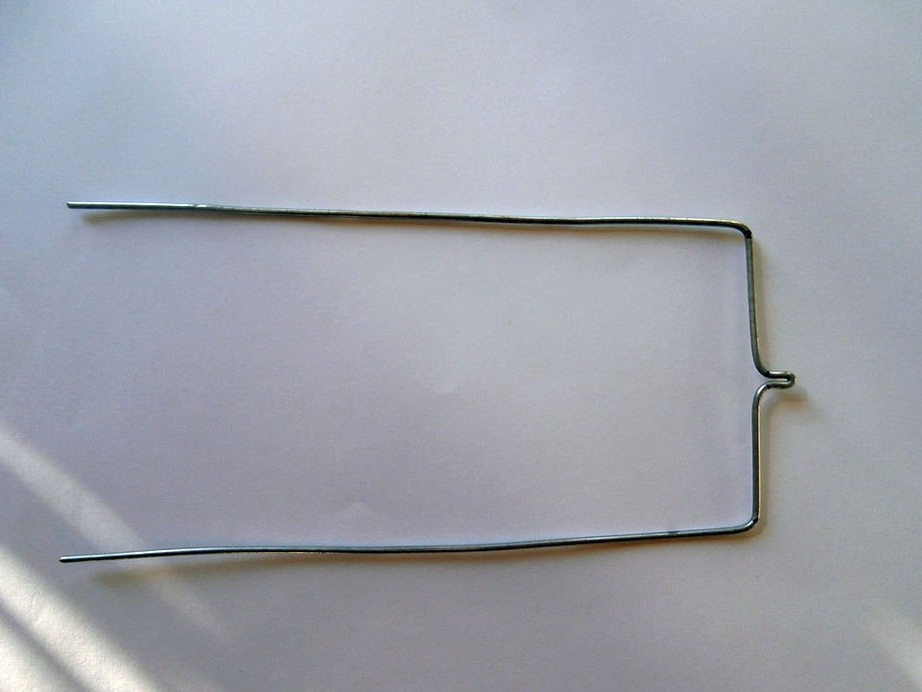
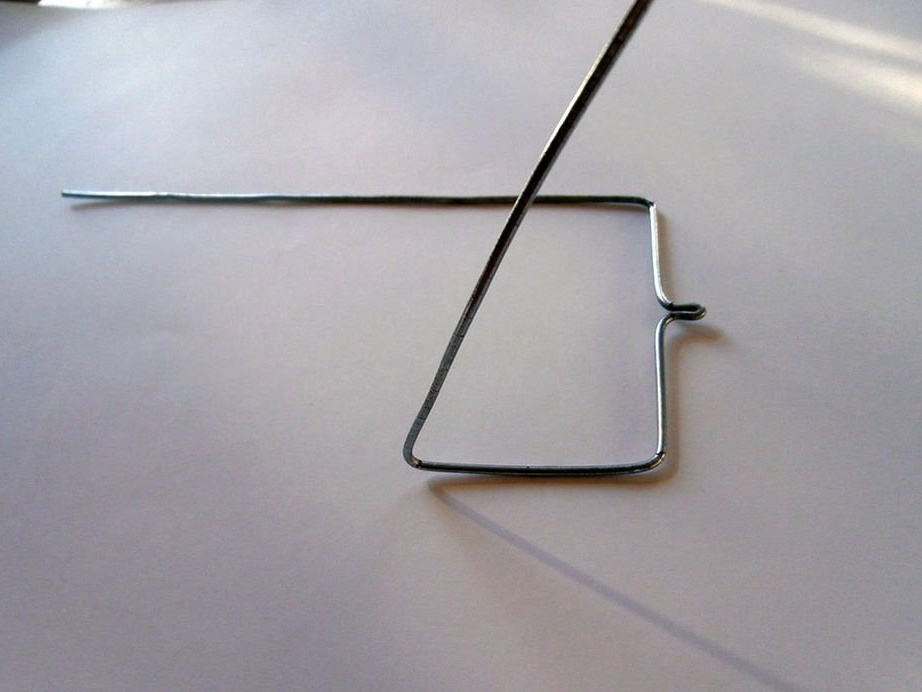
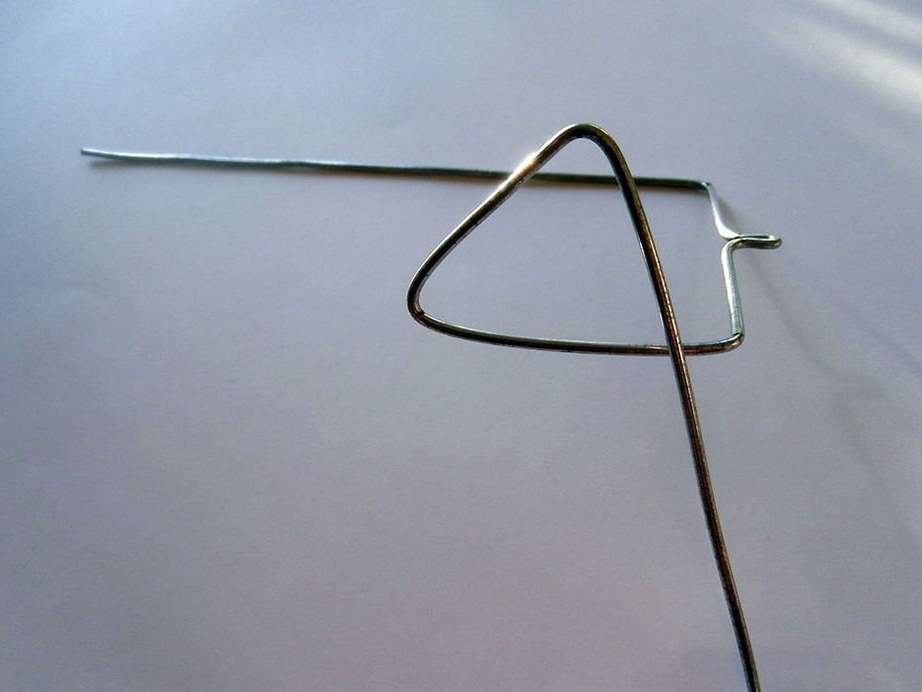
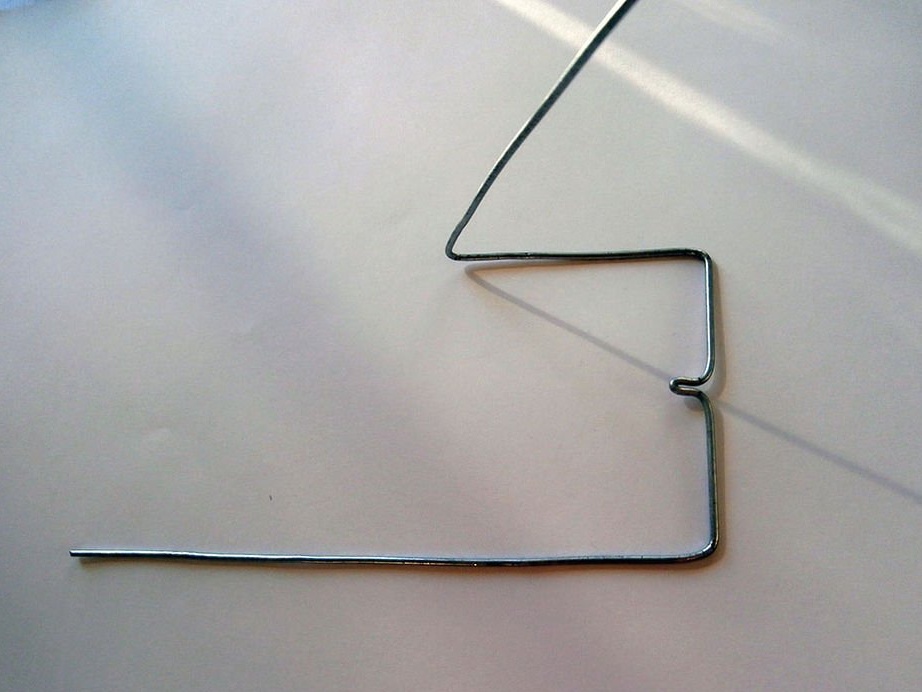
Paso 7: patas traseras
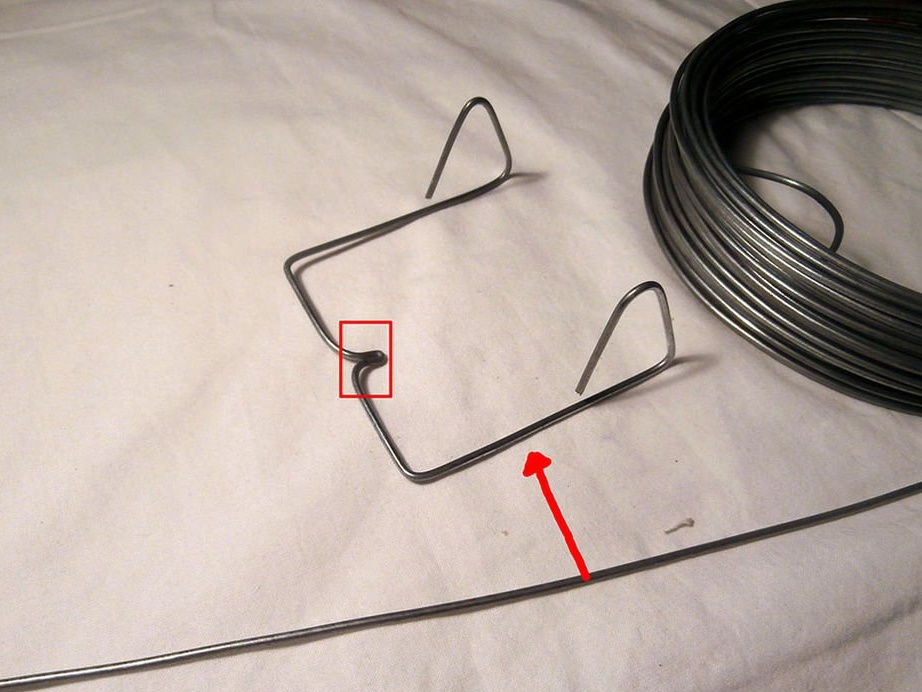
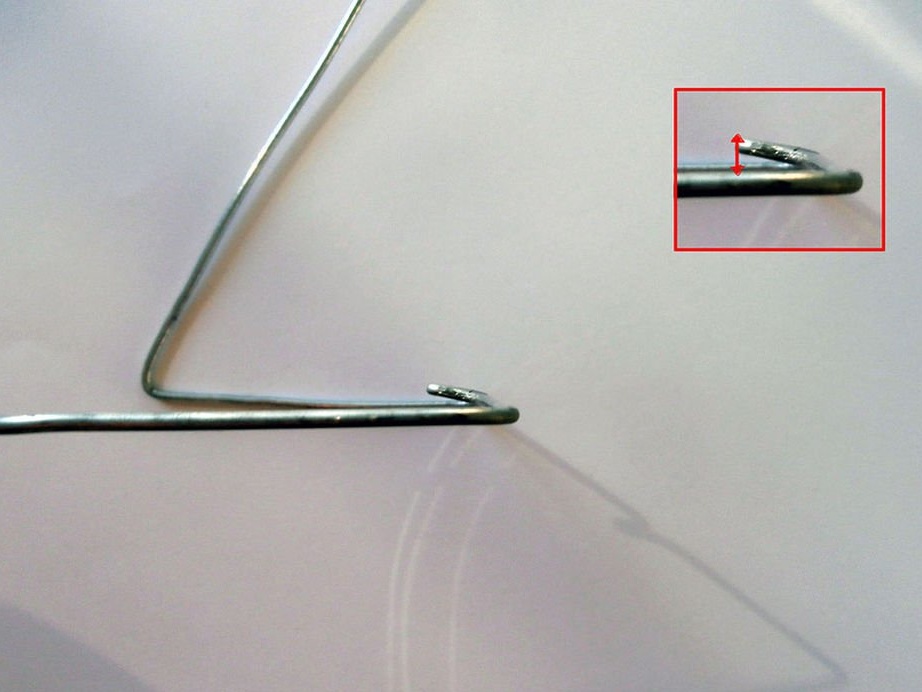
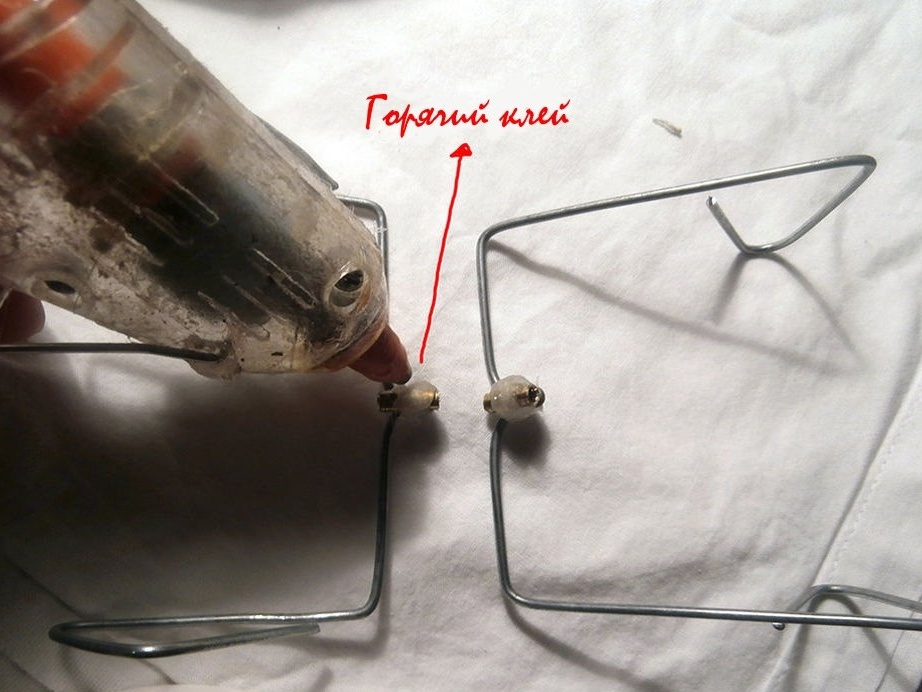
Paso 8: unir los pies
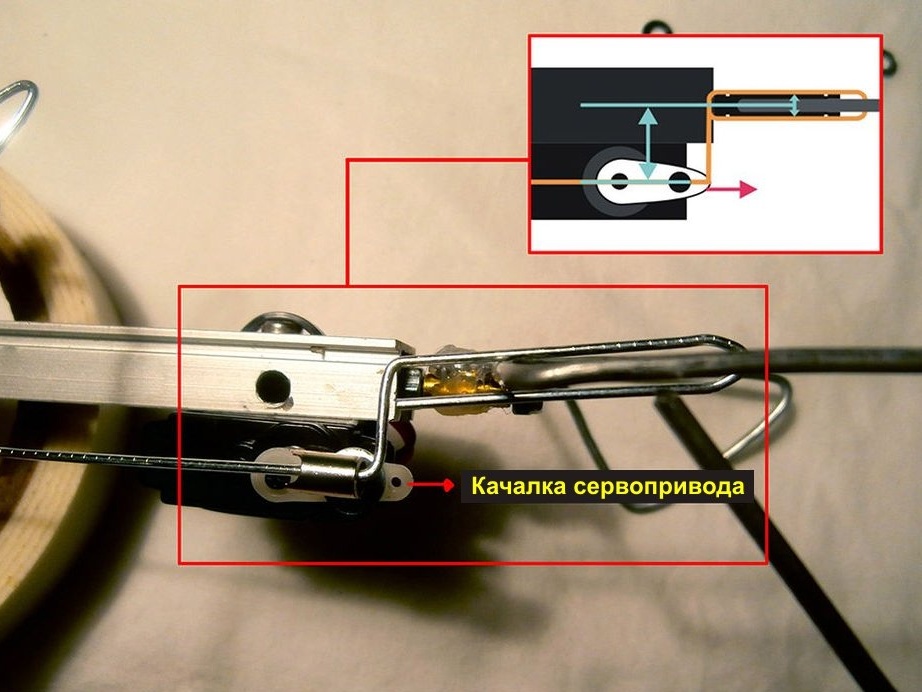
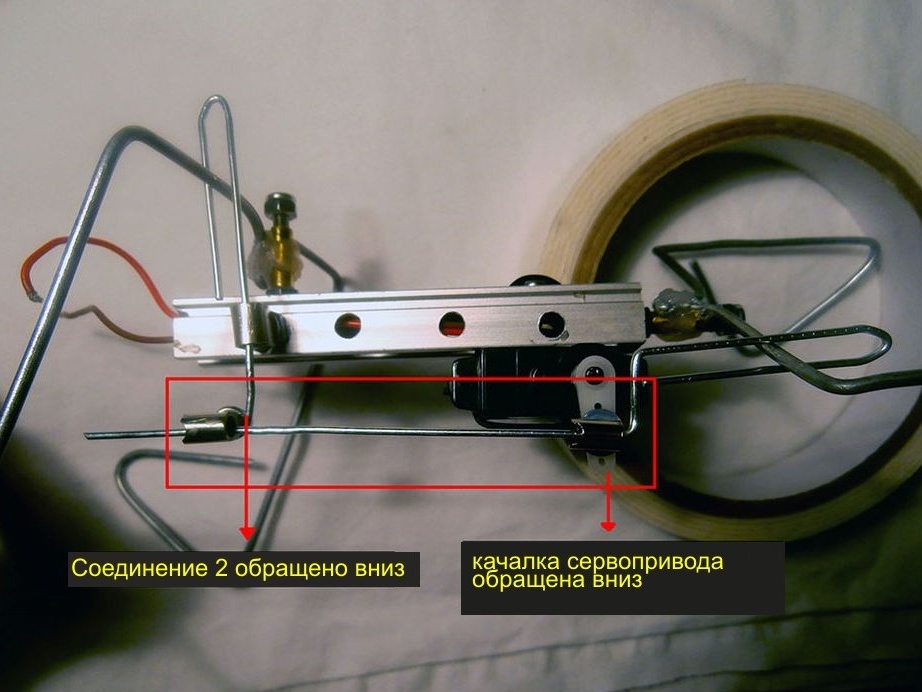
Paso 9: embrague
Paso 10: montaje del embrague
Paso 11: los toques finales
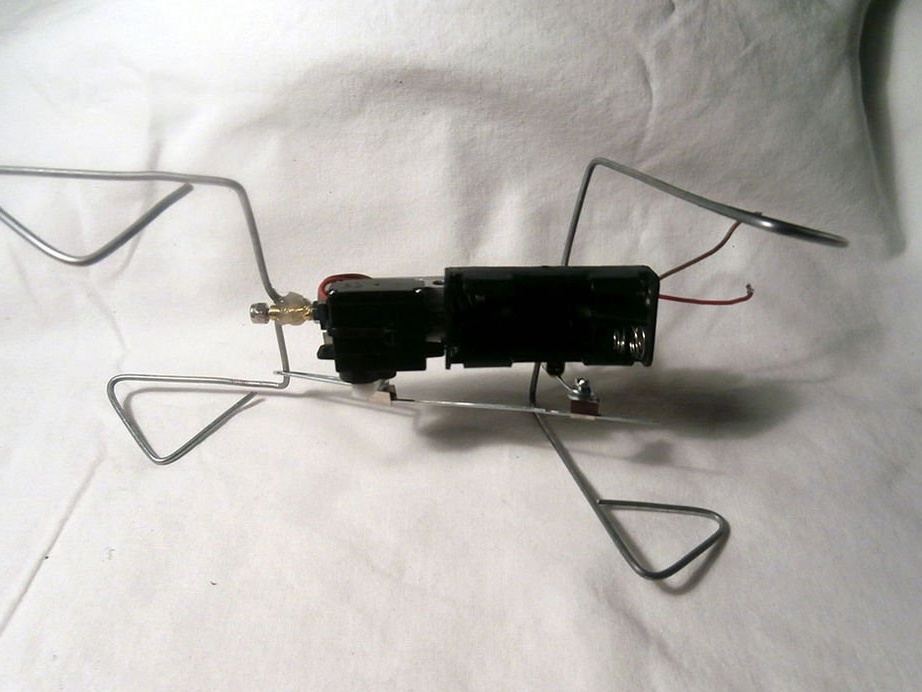
Al final, simplemente conecte el servo y las baterías, y el robot Owl comenzará un viaje por tu casa :)