

Vehículo todo terreno rastreado / tsiplev / - El autor y fabricante de este vehículo todo terreno Vitaly Tsyplev de la ciudad de Vladimir.
Reenviar a edificio vehículos todo terreno!

Listo para conquistar la inmensidad del país.
Comencé a trabajar en mi auto-fabricación en noviembre de 2013 y ahora la oruga está funcionando y operando con might and main, como se puede ver en este video.
Pero lo que vino antes de que la pila de hierro cobrara vida y corrió para la alegría de aquellos que dieron vida a esta pila.
Por supuesto, este es un deseo infatigable de crear. Crearte un placer, y otros sorprendentemente.
Todo comenzó con una auditoría, que está a la mano:
Características de rendimiento deseadas:
1) rotación diferencial - Puente Gaz-3110 desde el Volga, en stock.
2) Motor Volkswagen Glof WV Golf 1.3, en stock.
3) sin suspensión, sin equilibradores, rodillos neumáticos en los cubos traseros del VAZ-2108.99
4) llegó una oruga de una cinta transportadora con un espesor de 13 mm (cinta).
5) pistas - casi, como Remix59, esquina 32x3, tira 40x4 mm.
6) Ancho de vía: 50 cm.
7) Carga útil: 500-600 kg.
8) La velocidad máxima según los cálculos a 3000 rpm. en el motor - 16.8 km / h.
Me gustaría ir rápido, pero como dicen, es mejor ir en silencio que ir rápido.
Las esquinas y la tira están aserradas, perforadas, lo que se necesita está doblado.

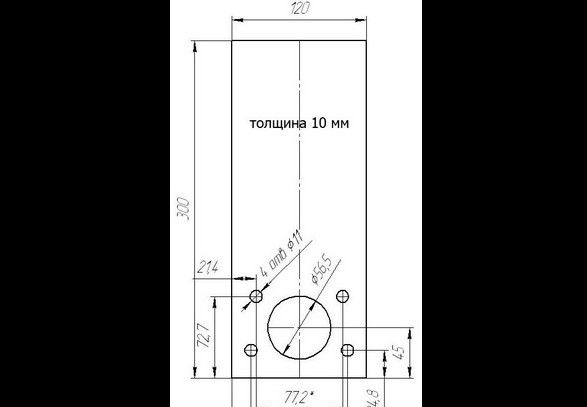
Guías para fijación interna.

Las dimensiones de las placas de guía son la altura.

Las dimensiones de las guías son de ancho.

Camión en la fabricación.

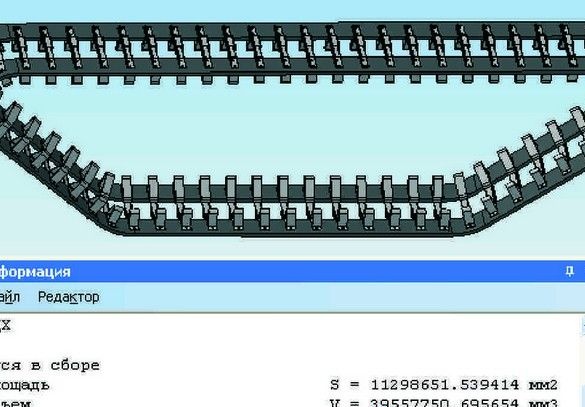
Forma de pista seleccionada.

Asterisco liderando la primera opción. El disco Volgovsky. El diámetro de la estrella es de 420 mm, 11 dientes, el paso de los dientes alrededor de la circunferencia del disco es de 120 mm. En consecuencia, entre las pistas 88 mm.

"Adaptador" KPP-KPP. Al mismo tiempo, será el segundo rodamiento para el eje de entrada de la caja de cambios Volga.



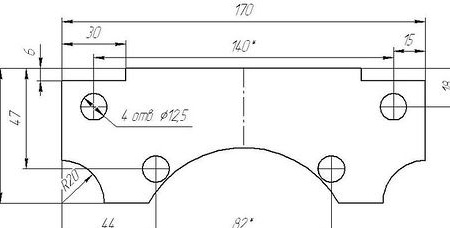
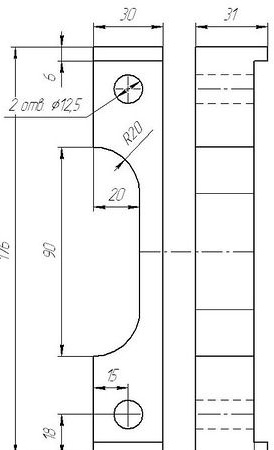
Diagrama de montaje de pinza de dibujos.
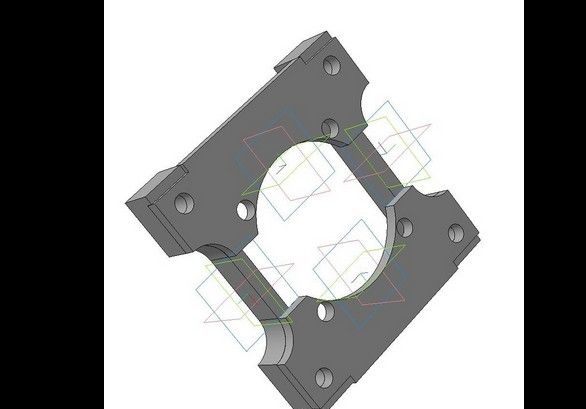
Vista frontal
Vista lateral
Listo, no es un vehículo todo terreno.

Detalles de pinza en un lado.

Discos de freno en un soporte.

Una oruga en una rueda motriz, un asterisco, control de ajuste, paso de diente, forma.

Video
Ensamblaje de oruga.

La oruga de un lado está lista.

Dibujo de un eje de fijación de ruedas básicas.
Las ruedas de tensión están listas, soldadas y revestidas con goma.

Placa de dibujo para montar el eje de la rueda de soporte.
Dibujo de la carcasa con los ejes de las ruedas de soporte.
Vista desde abajo.
Vista lateral
Los ejes de las ruedas de soporte están listos para la instalación.

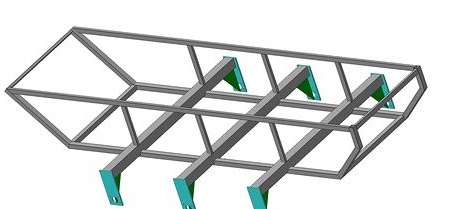
El marco ya está sobre ruedas.

Instalación del motor y el accionamiento hidráulico en el embrague.

El sistema de frenos está ensamblado y listo para funcionar.

Ajuste de la palanca de cambios.

El mecanismo de tensión floja se escalda y se fortalece.

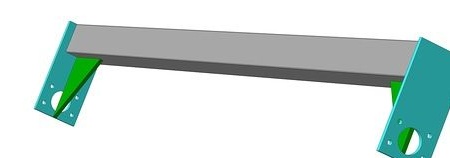
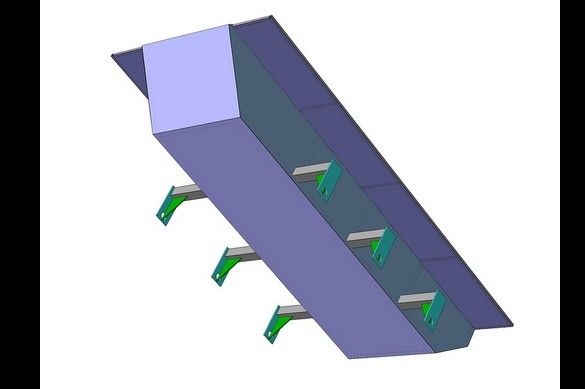
Comenzó a cocinar el cuerpo de la cabina.

Soldaba los lados y el tubo de escape.

Panel de control de naves espaciales (broma).

Toma la forma de un vehículo todo terreno de manera silenciosa.

Vista lateral

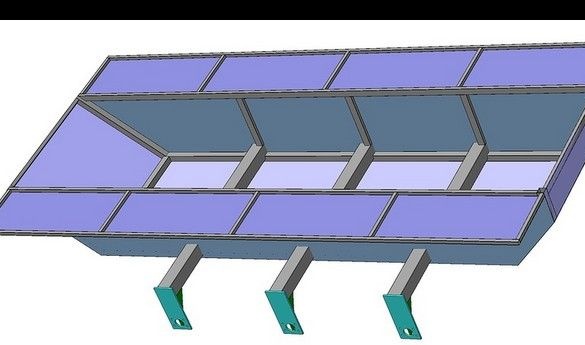
Las láminas de revestimiento están cortadas y listas para soldar.
La forma futura del tanque de combustible.

Le dieron la vuelta al dispositivo y lo escaldaron.

Preparamos un taxi, al mismo tiempo, y pintamos el fondo.

Decidimos instalar rodillos de soporte.

TTX pistas.
Instalación de silenciadores.

Boquillas montadas para drenar el aceite del sumidero del motor para facilitar el mantenimiento.


Pintura de carrocería y cabina.

Conecte las tuberías de freno.

Conexión de mangueras de freno.

Acabado interior.

La primera salida de entrada.
Las orugas están hinchadas.

Después del robo, los sujetadores se derritieron.

Nuevos soportes de silenciador y resonador.

Tuve que quitar un diente de la rueda dentada de transmisión. Reducir el diámetro de la rueda.

Espacios en blanco para piñones.

La segunda salida de rodaje.
Montar para enganchar un cuchillo excavadora.

Cuerpo de cuchilla.

La forma del cuchillo.

Camión doblado después del robo.

Fortalecimiento de la montura de la rueda motriz.

De pernos la fabricación de espárragos.

Trabajar con un basurero.
Pruebas de agua.
Deseamos buena suerte al equipo de vehículos todo terreno dirigido por Vitaly Tsiplev.