

Los pultoides se denominan robots que se pueden controlar de forma remota utilizando el control remoto. Por ejemplo, se puede usar un control remoto de TV para estos fines. La tarea principal que el autor se propuso en la fabricación de dicho robot es la simplicidad de su montaje. Considerado el robot no requiere la fabricación de una placa de circuito impreso, la instalación es muy simple y solo ocurre en cartón.

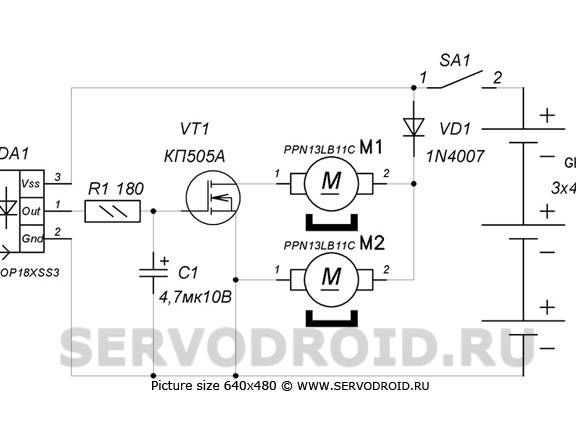
Electrónica El circuito del robot consta de solo cuatro componentes: un diodo, un transistor, un fotodetector y un condensador. Para la fabricación de la parte mecánica, también se necesitará un mínimo de materiales, por ejemplo, se utiliza un CD-ROM para hacer el caso.
Un robot hecho de esta manera comprenderá solo un equipo. Vale la pena presionar cualquier botón en el panel de control y el robot comenzará a girar. Si continúa presionando el botón, el ángulo de rotación se hará más grande, como resultado, el robot puede girar 360 grados.
Dispositivo robot
Un disco compacto se utiliza como base para la fabricación del robot. En cuanto a los elementos de potencia, se unen mediante tornillos M2. La placa electrónica, también el compartimento de la batería, se sujeta con cinta adhesiva.
Ahora sobre los motores, están ubicados en ángulo y sus ejes descansan contra la carretera. Por lo tanto, no hay necesidad de fabricar por separado las ruedas. Los pernos se sujetan con marcos que están hechos de una línea escolar.
Tres baterías de "dedo meñique" alimentan al robot, se instalan en un estuche especial. En total, la fuente de alimentación produce 4,5 V.
Y finalmente, el fotodetector, es solo uno aquí, es un tipo de TSOP. Recibe señales moduladas de cualquier control remoto, gracias a lo cual se puede controlar el robot.
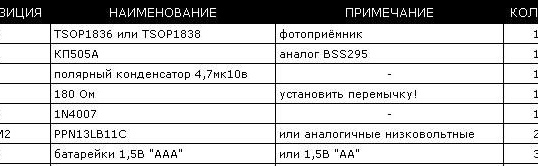
Materiales y herramientas para la fabricación:
- lazos de nylon;
- fotodetector tipo TSOP1836;
- un transistor de efecto de campo (KP505A);
- un disco compacto;
- Fular para baterías en tres secciones;
- tres "pequeñas" baterías;
- regla de plástico;
- tornillos para fijar el marco;
- cables e interruptor (tipo cruzado).
Proceso de fabricación:
Primer paso Diseño de PCB
Para hacer una placa de circuito impreso, primero debe imprimir un dibujo en papel. Debería obtener dos imágenes, en un dibujo de instalación y en el otro lado del tablero. En total, el tablero constará de tres elementos, en el centro habrá un cartón corrugado pegado con papel de oficina en ambos lados. Para pegar el tablero, se recomienda usar una barra de pegamento seco.
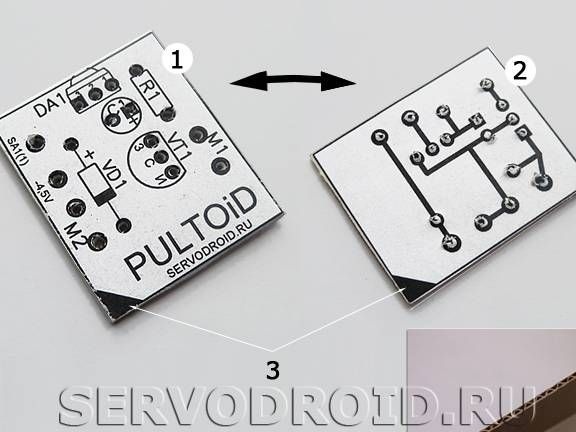
Paso dos Instalación de componentes de radio.
Al instalar componentes electrónicos, es importante no olvidar ni cortar los bordes sobresalientes de los contactos. Posteriormente, se doblarán, y así se creará un circuito eléctrico. Todos los elementos están conectados por soldadura de acuerdo con el esquema especificado.
La resistencia R1 en el circuito debe reemplazarse con cualquier puente. En cuanto al fotodetector, el orden correcto de su conexión también se muestra en la foto.

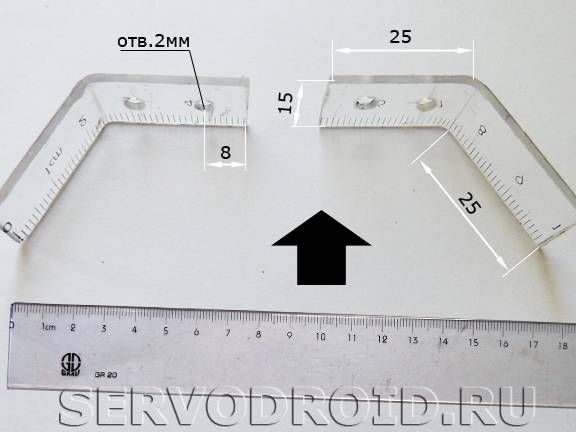
Paso tres Instalación del marco de potencia
Para instalar los motores, deberá crear un cuadro de potencia. Como material, se usará una regla de plástico de la escuela aquí. Debe cortarse en dos partes y doblarse como se indica en la foto. Para hacer que la regla comience a doblarse, debe llevar la punta del soldador caliente a un lugar de deflexión a una distancia de aproximadamente 2 mm. También para estos fines, puede utilizar un secador de construcción. La regla debe doblarse suavemente en un ángulo de aproximadamente 30 grados.

Después de crear el marco, puede continuar con su instalación. Para hacer esto, tome el CD y los tornillos de 2 mm con tuercas. Además, se perforan agujeros con un diámetro de al menos dos milímetros en los lugares correctos, y el marco se fija con tornillos. Para que el marco no se deslice, antes de instalarlo debe pegar cinta adhesiva de doble cara en el disco.
Paso cuatro Instalar el soporte frontal
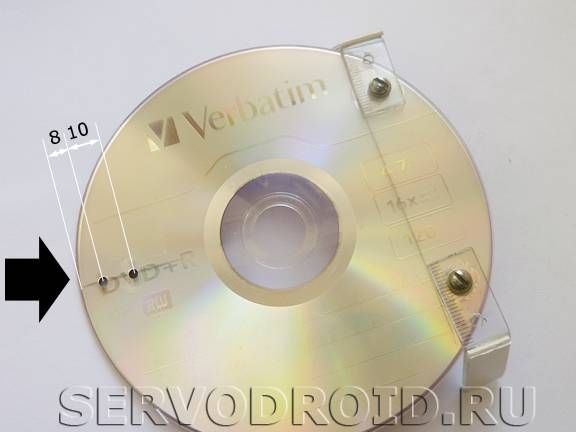
En la parte frontal del disco, debe perforar dos agujeros y preparar una regla de nylon. El tamaño de la regla debe ser de 3x150 mm. Debe insertarse como se indica en la foto. Como resultado, el soporte resultante se depreciará perfectamente durante la operación del robot y se deslizará a lo largo de la carretera.


Paso cinco Instalación del motor
Para evitar que los ejes del motor se deslicen por la carretera, se deben colocar protectores sobre ellos. Están hechos de goma de mascar, que se puede encontrar en las pastas de plumas de helio. Para instalar los motores, primero debe pegar un trozo de cinta adhesiva de doble cara al soporte, para evitar resbalones. Bueno, entonces los motores finalmente se arreglan con amarres de nylon.

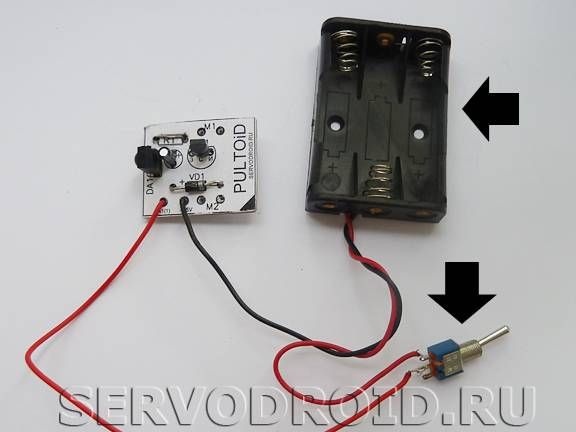
Paso seis Interruptor y conexión de alimentación
Como fuente de alimentación, puede usar cualquier batería cuya corriente no supere los 5 voltios. En este caso, se usa un estuche para baterías de tres dedos, que suman 4.5 V.
En cuanto al interruptor, está montado en el espacio del contacto positivo que proviene de la fuente de alimentación. El cable rojo está conectado a la placa al pin SA1 (1), y el cable negro al pin -4.5V.


También en esta etapa, puede conectar los motores, sus cables están conectados a los contactos M1 y M2.
Séptimo paso. Etapa final
En la etapa final, todos los elementos electrónicos deben repararse. Se conectan al disco con cinta de doble cara. En cuanto al interruptor, también debe repararse, para esto puede usar pegamento caliente.

Eso es todo, ahora el robot está listo. Puede intentar encenderlo y dar un comando para encender usando cualquier control remoto.