

Tal el robot ya ha sido creado y se llama DIY: LightBot. Además, cualquiera puede recolectarlo, todos los elementos para la creación se pueden encontrar fácilmente y el robot se ensamblará de manera bastante simple. Este tipo de robot perseguirá constantemente al propietario en la oscuridad y lo resaltará en el lugar correcto, lo que elimina la necesidad de sostener la linterna en la mano. El robot controlará el robot gracias al sensor IR, que está conectado al pie del propietario.
Materiales y herramientas para crear un robot:
1. Baliza infrarroja. Dicho dispositivo constará de cuatro LED infrarrojos, que se pueden encontrar en el control remoto desde el televisor.
2. Dos ruedas de un juego de K'nex o juguetes para niños.
3. Dos motores pequeños (se pueden encontrar en juguetes para niños).
4. Dos transistores infrarrojos como NPN o fotorresistencia. Los fototransistores infrarrojos no son difíciles de comprar.
5. Tres baterías AA y una de 9 voltios.
6. tubo de PVC.
7. Adhesivo termofusible.
8. Tenedor de plástico desechable.
El proceso de fabricación del robot:
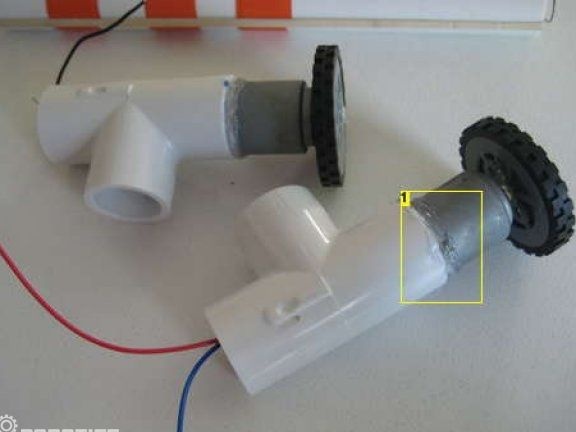
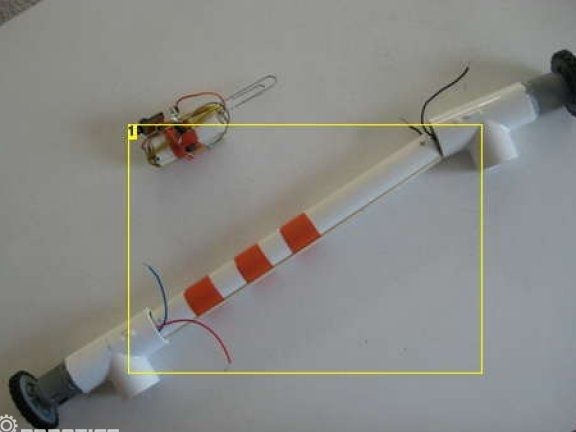
Primer paso Instalación del motor
Primero necesitas instalar los motores. Para su instalación, se utilizan "tees" de plástico, que luego se colocan en el tubo principal. Los motores se sujetan con adhesivo termofusible. No es necesario sentir pena por el pegamento aquí. También en esta etapa, las ruedas se pueden colocar en el eje de los motores. Para que se sujeten firmemente, también se pueden fijar con adhesivo termofusible.
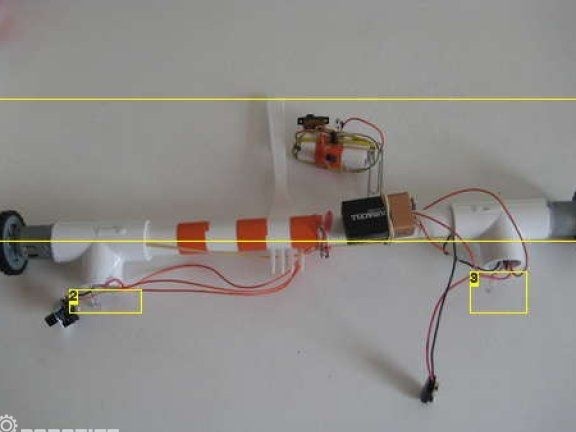
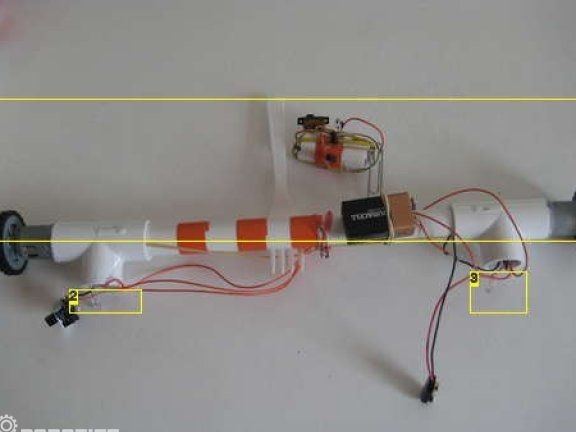
Paso dos Instalación de fotoresistencias
Se necesitan fotoresistores para rastrear la baliza infrarroja. Serán una especie de ojos de robot. Dependiendo de la dirección en la que saldrá la luz, el robot acelerará uno de los motores para girar en la dirección correcta.
Las resistencias de luz se unen a las "tes" en los lugares indicados por los números 2 y 3. En estas posiciones se pueden fijar con un adhesivo de tres barras.
Paso tres Instalación de fuente de alimentación
En total, el robot funciona con dos fuentes de energía. Estas son tres baterías AA y una batería de 9 voltios. En cuanto a las baterías de dedo, están instaladas dentro del tubo.Bueno, una batería tipo "Krona" está conectada al teléfono desde el exterior.
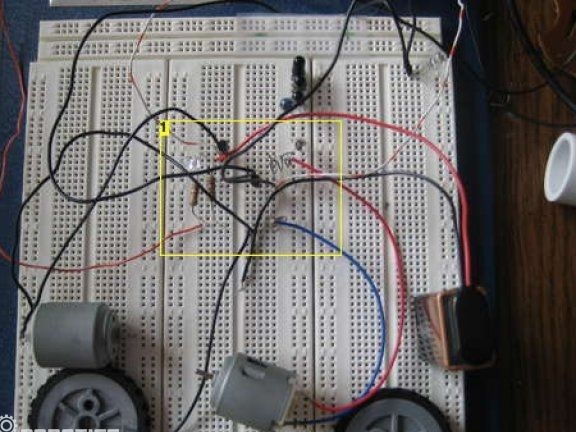
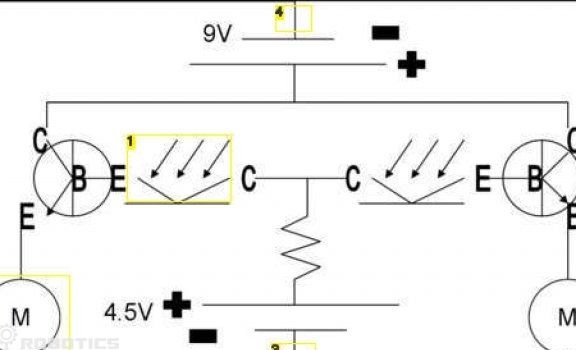
Paso cuatro Circuito robot
El esquema está diseñado de tal manera que si el robot ve radiación en un lado, entonces acelera el motor desde el lado opuesto, por lo que el robot gira. La velocidad deseada del motor se logra mediante el reemplazo experimental de resistencias.
Otro circuito puede complementarse con un interruptor. Debe instalarse de tal manera que interrumpa el suministro de energía al robot.
En el diagrama, el número 1 denota un fototransistor, 2 - el controlador del motor, 3 - un lugar para instalar un interruptor, 4 - también puede colocar un interruptor aquí.
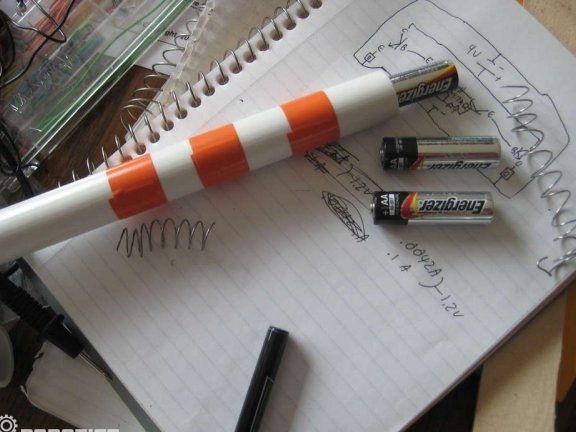
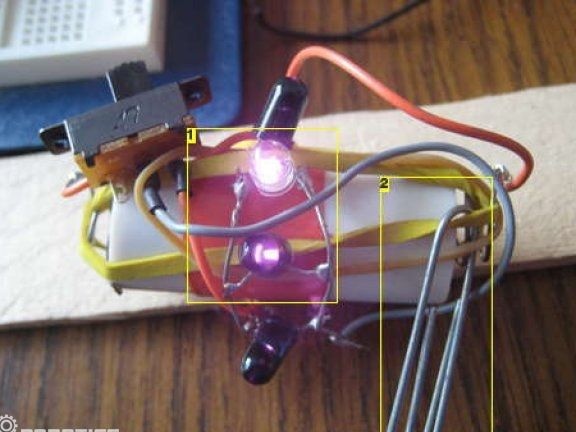
Paso cinco Crear un faro IR
Para crear una baliza infrarroja, se toma un tubo corto de cloruro de polivinilo, en el que se instala una batería AA. Los contactos se mantienen gracias a una banda elástica, y la fuente de alimentación de los cuatro diodos infrarrojos se controla mediante un interruptor. Es imposible ver tanta luz con el ojo, para verificar la operabilidad de los diodos, es necesario mirarlos a través de una cámara digital. La baliza se sujeta con un clip de papel ordinario a la pata.
Paso seis La etapa final del ensamblaje del robot.
Ahora todo debe estar conectado como se indica en el diagrama. La parte mecánica también debe ensamblarse, se debe prestar la mayor atención a los fotoresistores, deben sobresalir, porque de lo contrario no podrán captar la señal de la baliza. Ahora, al encender el robot, debe caminar alrededor y ver qué hará.
Por supuesto, el robot puede no ir tras el propietario la primera vez, pero no debe desesperarse, porque el esquema se puede modificar y el robot se puede configurar según sea necesario. Según el autor, en el futuro se puede instalar software en el robot, gracias al cual reconocerá objetos y personas. También puede instalar muchos sensores diferentes y hacer de este robot un dispositivo de alta tecnología.