
La peculiaridad del robot BIBOT-1 es que puede realizar dos tareas. Se puede mover detrás de una fuente de luz o a lo largo de una línea negra que se puede dibujar en papel. El robot muy flexible en la configuración, es decir, más tarde se puede personalizar a cualquier condición deseada, es decir, para que sea más sensible a la luz o menos. También es posible ajustar la velocidad de rotación de los motores, esto permitirá que el robot funcione mejor, especialmente al moverse a lo largo de la línea.

El dispositivo y el principio del robot:
La base del robot está hecha de cartón, la plantilla está impresa en la impresora y luego se bloquea. En cuanto al módulo de componentes de radio, se tomó una textolita como base, el módulo está conectado a la base del robot. Para hacer el cuerpo más rígido, se utilizan costillas especiales en el diseño.
Los motores están instalados como en la mayoría de estos hecho en casa, es decir, en ángulo. Debido a esto, no hay necesidad de colocar las ruedas y la caja de cambios. Para evitar que los ejes se deslicen sobre la superficie, se colocan protectores sobre ellos.
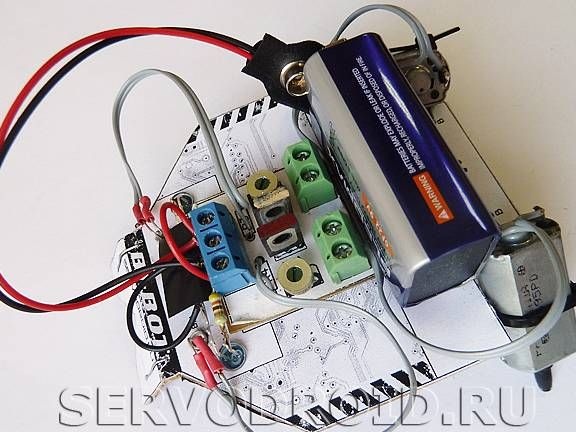
Una batería de 9V tipo 6F22 se utiliza como fuente de alimentación. La batería está unida con cinta y siempre está disponible para reemplazarla fácilmente.
En cuanto al interruptor, entonces auto decidió evitar instalarlo. El robot se enciende y apaga manipulando el clip que se une a la batería.
Y finalmente, el ajuste del robot. Para ajustar la sensibilidad del robot, el sistema tiene dos resistencias de ajuste. Cuando giran, puede ajustar la sensibilidad del robot a la luz, y también puede ajustar la velocidad de rotación de los motores. Cuanto más sensible sea el robot a la luz, más rápido se moverá, y viceversa.
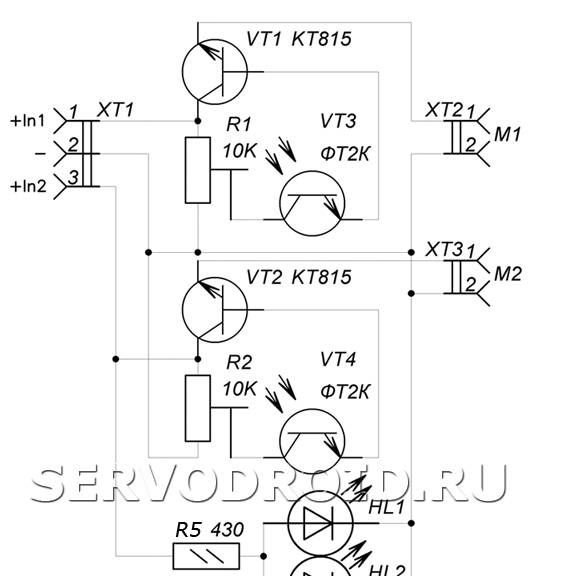
En cuanto al principio de funcionamiento, todo se expone en el diagrama.
Materiales y herramientas:
- Batería de 9V y clip para conexión;
- dos conectores para conectar motores (bloques de terminales de dos secciones);
- motores;
- regla de nylon;
- protector (rodillo de goma);
- dos fototransistores;
- dos LED infrarrojos;
- un soporte de una grapadora;
- bloque de terminales de tres secciones para la conexión de la fuente de alimentación;
- resistencia de sintonización.

Proceso de fabricación:
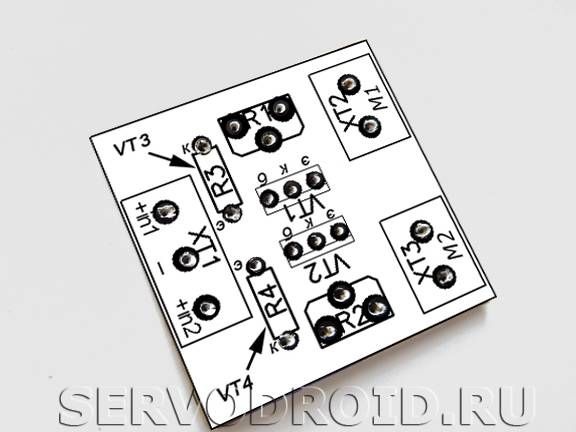
Primer paso Diseño de PCB
La tarifa se crea mediante el método LUT. Antes del trabajo, la superficie de la fibra de vidrio debe limpiarse a fondo y luego lavarse y secarse completamente. Después de la fabricación, las pistas conductoras deben verificarse con un multímetro para detectar un cortocircuito.
Paso dos Instalación electronica elementos
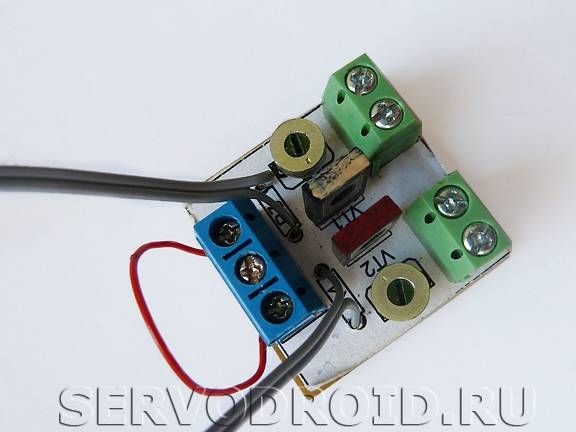
A continuación, debe tomar un dibujo impreso en papel y pegarlo en el tablero creado. En este caso, los agujeros en el papel y en la PCB deben coincidir exactamente. A continuación, los componentes de la radio se instalan como se indica en el diagrama. En el proceso de trabajo, la instalación de resistencias R3, R4 necesita instalar fototransistores VT3, VT4.
Las secciones extremas del bloque de terminales de tres secciones XT1 deben conectarse con un cable de montaje. Los puntos de conexión de los contactos deben estar bien aislados, lo mejor es usar un tubo termocontraíble para estos fines.
Paso tres Cómo crear un caso
Un dibujo del cuerpo debe imprimirse en una hoja normal de papel A4. A continuación, debe tomar un trozo de cartón corrugado y pegarle un dibujo, luego la caja debe cortarse alrededor del perímetro.
Donde el pictograma "tijeras" se encuentra a lo largo de líneas en negrita, se deben hacer cortes. Posteriormente, a lo largo de las líneas punteadas negras, debe doblar el cartón como en la foto y colocar las flechas negras.





Delante y detrás de la carcasa a la posición especificada con una grapadora, debe instalar los soportes. Los lugares de su instalación están marcados por líneas negras con círculos. Se necesitan grapas para hacer que el marco sea más rígido. Después de instalar los soportes, se doblan tediosamente a lo largo de las líneas de plegado.
En los lugares marcados como BF1, BF2, debe hacer agujeros para la instalación de fototransistores. En los lugares HL1, HL2, debe hacer agujeros de tal tamaño que se ajusten al diámetro de la carcasa de los LED infrarrojos.
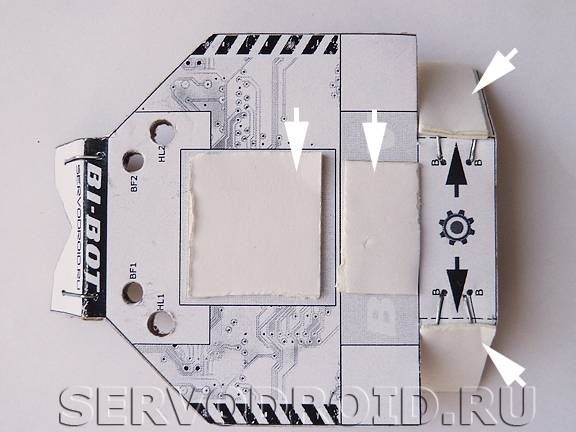
En los lugares designados como Mod "," BAT 9V "y" MOTOR 1 "," MOTOR 2 ", pegue las tiras de cinta adhesiva de doble cara.
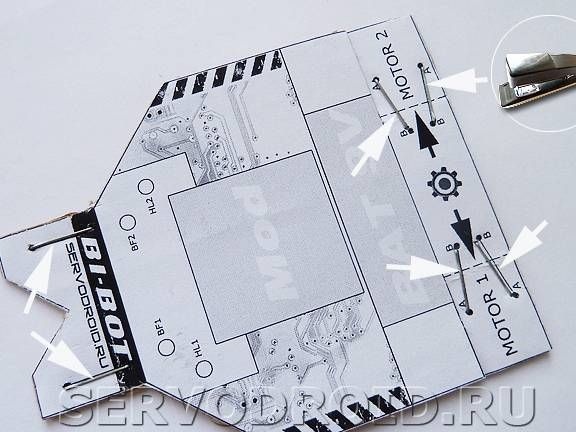
Paso cuatro Instalacion de motores
Los motores están montados en posición con amarres de nylon. Para evitar que los ejes se deslicen, deben usarse con protectores. Están hechas de gomas, que se encuentran en las barras de helio de los bolígrafos. En la misma etapa, suelde los cables a los motores.


Paso cinco Instalación de LEDs infrarrojos
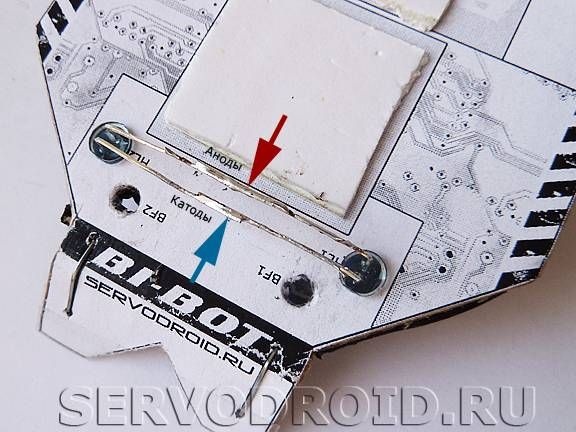
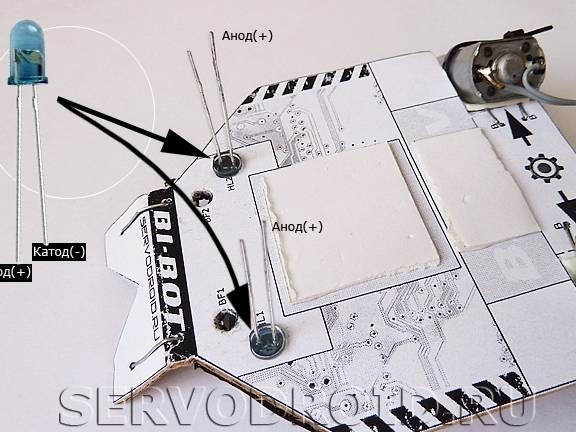
Al instalar LED infrarrojos, es importante no confundir sus conclusiones, para elementos importados un contacto largo es un ánodo, es decir, un plus. Los LED se instalan en las posiciones HL1, HL2 como se muestra en la foto. Los hallazgos se doblan para que los diodos se puedan conectar en paralelo.
Se debe soldar una resistencia de 430 ohmios al contacto positivo de los LED y un cable negro al contacto negativo.
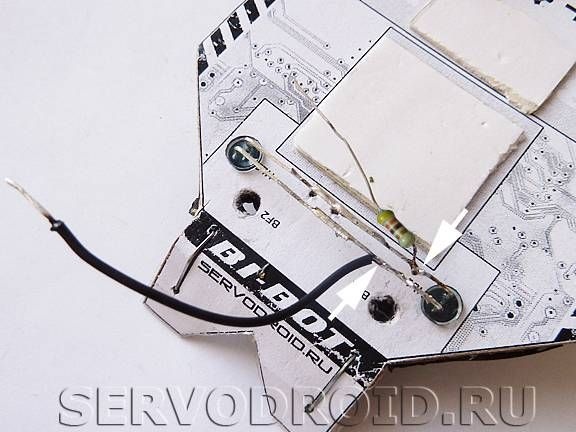
El otro extremo del cable negro debe estar conectado al pin central del bloque de terminales de tres secciones. En cuanto a la salida de la resistencia, está conectada al terminal del bloque de terminales.
Paso seis Fase final de construcción
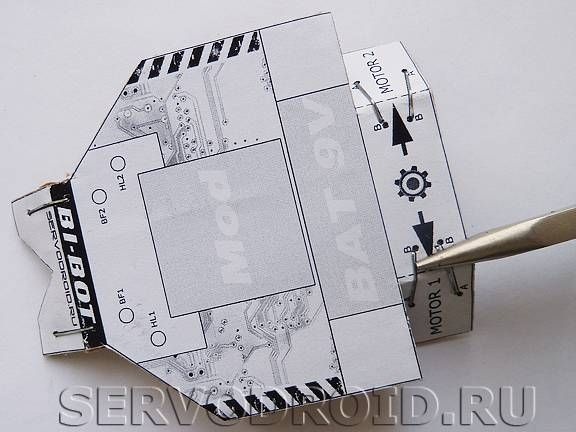
Para que el robot se mueva a lo largo de la línea, los fototransistores se colocan BF1, BF2 como en la foto.
Los transistores para movimiento detrás de la fuente de luz se colocan en la parte posterior.
En conclusión, los motores están conectados y se pone la batería.

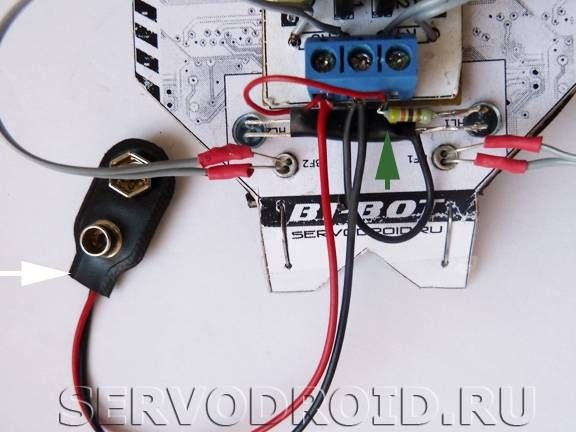

Eso es todo, el robot está listo. Ahora puede intentar encenderlo y configurarlo en las condiciones deseadas.