

En el video puedes ver cómo funciona el robot. Cambia gradualmente de color durante la operación.

Materiales y herramientas para ensamblar el robot:
- Soportes de montaje en forma de U;
- cuatro baterías LR44 de 1.5V cada una;
- LED RGB multicolor con función de conmutación;
- tubos aislantes;
- chincheta de acero;
- motor de baja tensión tipo RF-300CA;
- botón para encender el robot (con dos cables);
- cables para conectar el motor;
- LED de alarma intermitente.
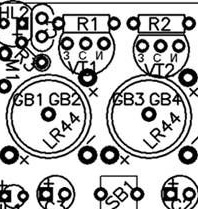

En cuanto a lo necesario electronica elementos, se muestran en la figura. La placa de circuito impreso está hecha de una lámina de PCB, sus dimensiones son de solo 30X30 mm. El autor también recomienda el uso de pequeños condensadores polares para el ensamblaje.
Proceso de fabricación de robots
Primer paso Diagrama esquemático del robot.
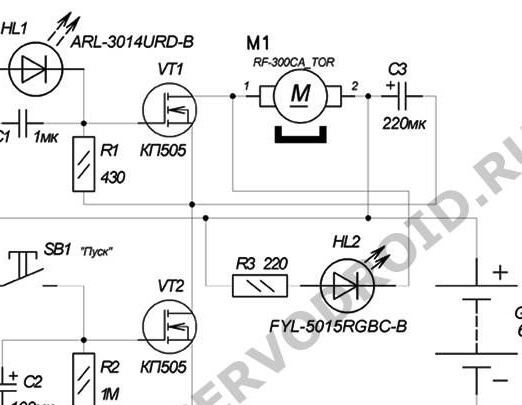
El circuito del robot se puede ver en la figura. Después de insertar la batería, el robot está apagado, para encenderlo, presione el botón SB1. Inmediatamente después de esto, el condensador C2 se carga instantáneamente. La placa positiva del condensador está conectada a la puerta del transistor de efecto de campo VT2. A este respecto, cuando se alcanza el umbral de conmutación, la resistencia del canal fuente de drenaje de este canal disminuye instantáneamente y se forma una carga potencial negativa en el drenaje. Bueno, lo que sucede a continuación se puede ver con más detalle en el diagrama.
Paso dos Montar LED RGB
El LED debajo del número 1 está montado en la placa de circuito impreso. En el dibujo, esta posición se llama HL2. Después de instalar el LED, sus conclusiones deben doblarse para que el LED se dirija hacia un lado. Por lo tanto, durante la operación, el LED no brillará hacia arriba, sino hacia un lado, iluminando las paredes. En qué dirección brillará la luz se indica con una flecha negra.

Paso tres Monte los soportes de montaje de la batería
Para proporcionar contacto entre la batería y el robot, se utilizan pasadores de presión.Un botón está instalado en el centro, en el diagrama está marcado como GB1, GB2, y el segundo está en la posición GB3, GB4. Para fijar de forma segura los contactos, los botones se sueldan con una gran cantidad de soldadura.


Las baterías se instalan en el botón de metal debajo del número 3. Las baterías se fijan con un sujetador en forma de U, en el que se usan aisladores de los tubos. La parte superior del soporte debe estar ligeramente doblada con un arco hacia abajo, esto permitirá que las baterías se presionen hacia el contacto inferior. Se necesitan tubos aislantes para que las caras verticales de las baterías no entren en contacto con las horizontales.
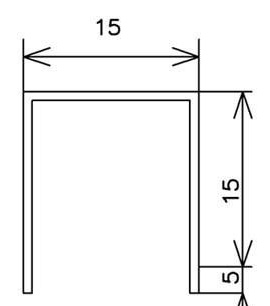
Para hacer un sujetador en forma de U, debe usar dos clips de papel. Deben doblarse en forma de U, como se indica en el dibujo. Se puede usar cualquier tubo, aquí se usa cloruro de polivinilo. Su altura debe ser igual a la altura de las baterías.
Instale el soporte soldando, para esto necesita estañar sus extremos. Para estañar, es necesario usar un fundente neutro que no se lave.
Paso cuatro Instalar el motor
El motor se instala en el lado del tablero donde pasan las pistas, se encuentra con el eje hacia abajo. Para sujetar el motor, puede usar pegamento caliente o cinta de doble cara. Pero antes de montar firmemente el motor, debe conectarlo y verificar la operatividad de todo el sistema.

Paso cinco Configuración y prueba hecho en casa
Después de ensamblar el robot, puede probar y configurar. Para hacer esto, debe instalar baterías en el robot, se instalan en lugar de GB1, GB2 y GB3, GB4. En este caso, la electrónica debe estar apagada. Después de instalar las baterías, el robot se puede encender, esto se hace usando el botón SB1. Después de presionarlo, el motor debería comenzar a funcionar, el LED HL1 parpadeará y el LED RGB también se encenderá.
Después de un tiempo, el robot se apagará automáticamente, se detendrá y todos los diodos se apagarán. Luego se enciende de la misma manera que por primera vez, presionando un botón.

Para ajustar el tiempo del robot, debe experimentar con los valores de la resistencia R2 y el condensador C2, ellos son responsables de esta función. Si necesita establecer la operación máxima del robot, entonces la capacitancia del capacitor debe ser lo más grande posible. De una manera tan simple, puedes armar un robot tan interesante.