
Materiales y herramientas:
- microcontrolador Arduino (en este hecho en casa aplica Arduino Uno Rev 3);
- Dos servos de Parallax;
- joystick (también de Parallax);
- placa de circuito) pequeño);
- conectores para la conexión;
- Un dispositivo para rastrear el movimiento de los servomotores (se utilizan una cámara web rota y cubos de lego).
Proceso de montaje casero:
Primer paso Conectamos servomotores
El proceso de montaje casero comienza con la conexión de los servomotores. Para armar un diseño preliminar, se utiliza una placa de circuito. Entonces será posible hacer un escudo separado. En la figura puede ver cómo está conectado exactamente todo.
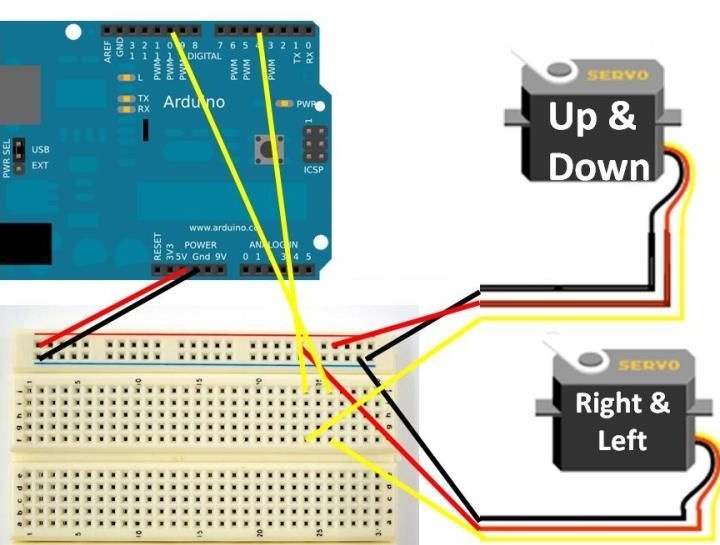
El cable rojo es el poder, se conecta al pin de 5V en el controlador Arduino.
El cable negro es un signo negativo (tierra), se conecta a la salida Arduino llamada GND.
El cable amarillo del servomotor derecho e izquierdo debe conectarse al pin 11. En algunos modelos, puede ser blanco.
Se debe conectar un cable amarillo arriba y abajo similar al pin 4. También puede ser blanco en algunos modelos de motor.
Es importante recordar que los conectores de señal utilizados para controlar el motor provienen de las salidas PWM.
Paso dos Conecta el joystick
Cómo se conecta el joystick se puede ver en la imagen. Al principio, el esquema puede parecer bastante complicado, pero de hecho no hay nada complicado aquí. Al igual que con los motores, aquí se usa una placa de cableado.
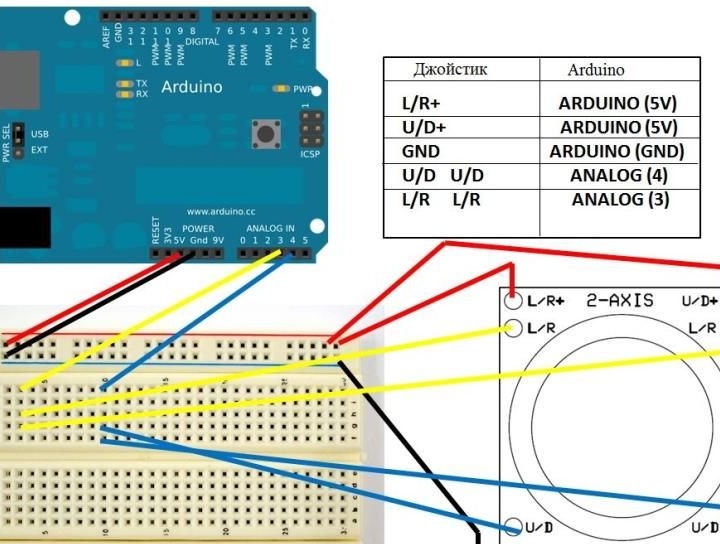
1. En el módulo joystick, puede encontrar las salidas U / R + y L / R +. A través de estas salidas, se conecta la alimentación. En consecuencia, debe aplicar un voltaje de + 5V desde el pin correspondiente al Arduino.
2. También hay dos conectores debajo del joystick llamados L / R y dos conectores U / D. Deben conectarse a las salidas analógicas A3 y A4.
3. Bueno, en conclusión, la tierra en el joystick debe estar conectada a la tierra en el Arduino.
Después del montaje, la conexión debe ser verificada dos veces. Es debido a errores de conexión que en la mayoría de los casos surgen problemas. Esto es especialmente cierto cuando se usa una placa de circuito y hay muchas conexiones en ella.
Paso tresBoceto para Arduino
El código es muy simple y contiene comentarios detallados. El código anterior solo debe copiarse en el IDE de Arduino. Una vez que se carga el código, los motores no deben moverse. Solo deben comenzar a moverse cuando se presiona el botón del joystick.
Problemas que pueden surgir y cómo resolverlos
1. Si los motores no se encienden, verifique la conexión. Las salidas PWM se usan para conectar motores, y las salidas analógicas se usan para conectar joysticks.
2. Sucede que inmediatamente después de cargar el código, los motores comienzan a vibrar. Esto sucede si conecta incorrectamente los pines U / D + L / R +. La conexión debe verificarse cuidadosamente. Para no quemar la placa durante la prueba, debe estar desconectada de la computadora.
3. Si se vuelve a comprobar todo, pero los motores aún no quieren funcionar, puede intentar volver a conectar el joystick. Debe retirarse de la placa de circuito y luego volver a instalarse con cierto esfuerzo. Los conectores de joystick deben ir bien en el diseño.
Si todo resultó, ahora puede comenzar a crear cualquier artículo hecho en casa con control a través del joystick. Por ejemplo, puede hacer un robot que se pueda controlar con un joystick y mucho más.