

Video de trabajo del robot
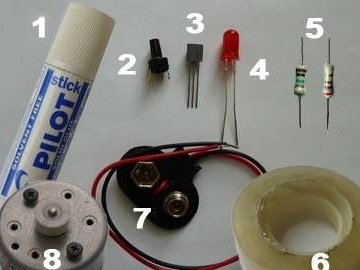
Materiales y herramientas para crear un robot:
- barra de pegamento seco;
- cinta transparente;
- botón de dos pines no fijo;
- un LED intermitente tipo ARL-513URC-B;
- transistor tipo KP505A;
- dos resistencias con un valor nominal de 1 M y 270 ohmios;
- conector de clip para conectar a una batería del tipo "Crown";
- modelo de motor RF-300CA-D / C 3V o similar.

Funcionalidad y características del robot:
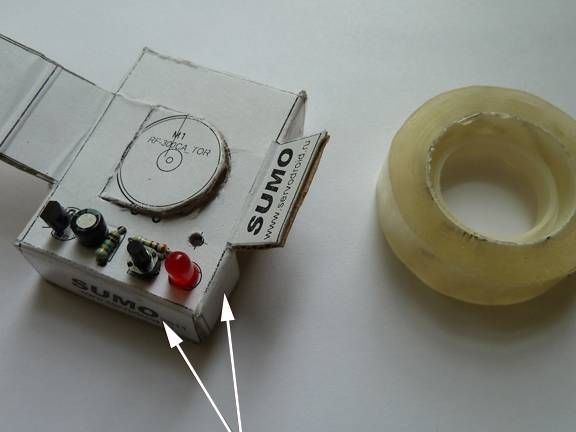
En la foto puedes ver ya ensamblado el robot. Para mover el dispositivo, solo se usa un motor, se instala verticalmente, pero en cierto ángulo. Cuando se mueve en un segmento corto, el robot se mueve en línea recta y forma un arco en una sección más larga.
Se usa un botón para encender el robot; cuando se presiona, el robot se enciende durante 20 segundos. Después de eso, se produce un apagado automático y el robot está en modo de espera hasta la próxima activación.
Otra característica del robot es que se detiene automáticamente en el borde del anillo. El cumplimiento de esta condición es posible si el peso del oponente no será inferior al peso del robot y el grosor del anillo no será inferior a 3 mm.
Aquí, una batería de 9 voltios se utiliza como fuente de alimentación, se monta en la parte superior del robot. Gracias al peso adicional, el robot acumula la energía cinética necesaria para las acciones necesarias.
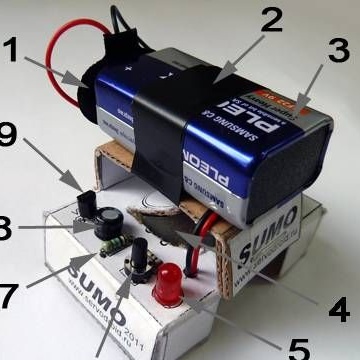
En la imagen, los componentes del robot están marcados con números:
1. Clip para conectar la batería.
2. Pestillo de la batería.
3. Fuente de alimentación (batería de 9 V).
4. El motor.
5. LED parpadeante (indica que la alimentación está conectada).
6. Botón para encender el robot.
7. Resistencia, gracias a ella puedes configurar el tiempo del robot.
8. Condensador, también es responsable del tiempo del robot.
9. Transistor tipo KP505A, es un controlador de motor.
Proceso de ensamblaje del robot:
Primer paso Hacemos el caso
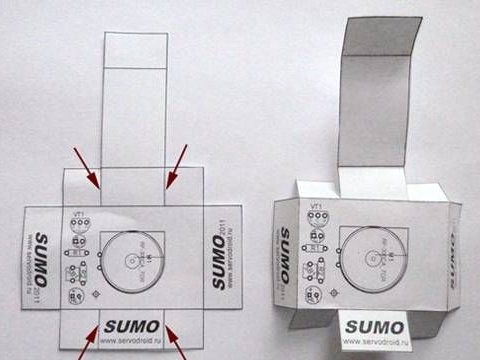
Para hacer el caso, el autor usa un cartón corrugado, debe aplicarle un contorno de acuerdo con la plantilla. La plantilla se puede imprimir en una impresora, se adjunta al artículo. Además, después de hacer los pliegues necesarios, el patrón se puede cortar a lo largo de líneas gruesas. Para instalar el motor, debe cortar un semicírculo en el cartón y luego doblarlo un poco, como se indica en la foto.


Paso dos Instalación de elementos de radio.
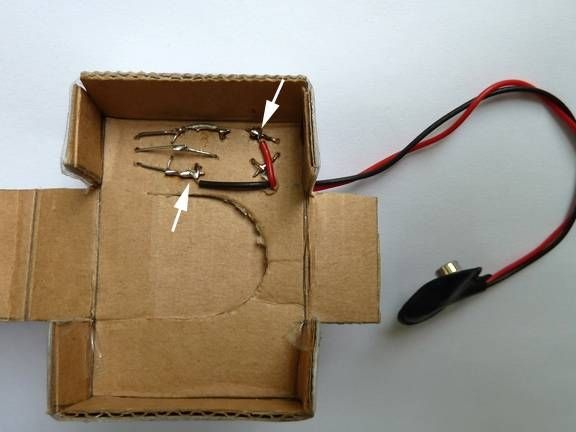
En la siguiente etapa, debe instalar todos los elementos de radio necesarios. Para hacer esto, debe tomar un punzón y hacer agujeros en el cartón, deben hacerse en marcas redondas. Para arreglar los componentes, después de la instalación, sus conclusiones deben estar ligeramente dobladas. También puede ver la marca en forma de una vista en el cartón, aquí debe hacer un gran agujero, un cable de alimentación lo atravesará.
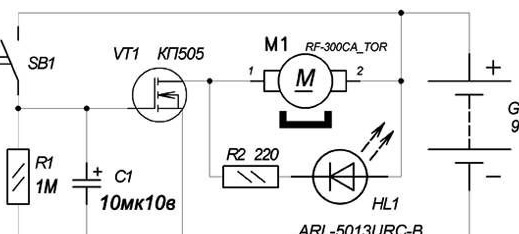
Después de eso, puede tomar un soldador y comenzar a conectar los contactos de los elementos de radio de acuerdo con el esquema.





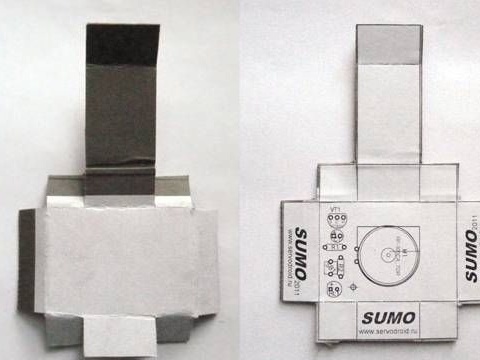
Paso tres Arreglamos las superficies laterales inferiores
En esta etapa, las superficies laterales inferiores se pueden unir. Para hacer esto, debe doblar los planos inferiores y luego fijarlos con cinta transparente. También en la imagen puedes ver los elementos de la caja inclinados hacia arriba, son necesarios para reparar la batería.


Paso cuatro Conectar periféricos
Para conectar la alimentación a la batería, debe usar un conector de clip. El cable debe pasar a través del orificio, el rojo está soldado al contacto positivo del LED y el negro al menos del condensador C1.
Luego debe conectar las superficies laterales izquierda y derecha, como resultado, se debe obtener la letra "P". Para una fijación confiable de los elementos, se utiliza un soporte de la grapadora. Dónde instalar los soportes se indica con una flecha blanca. Las abrazaderas se pueden sujetar con alicates.


Paso cinco Instalar y conectar el motor.
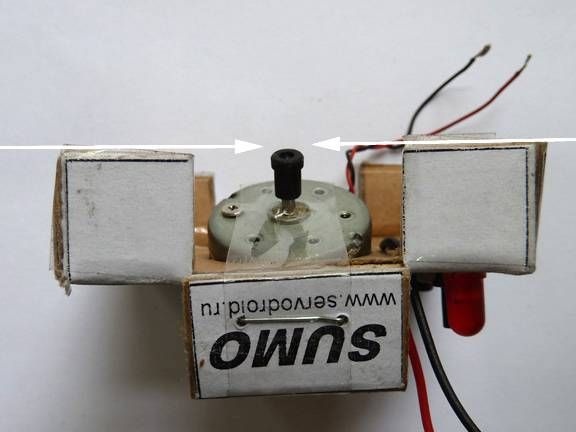
Para que el robot se mueva en línea recta, su eje debe estar en cierto ángulo con respecto a la superficie. En otras palabras, el robot se parará en las partes laterales y su eje solo estará en contacto con la superficie. Para que el eje del robot tenga un buen agarre, debe ponerse una banda elástica, puede ser un batista o un retenedor de goma de una pluma de helio.
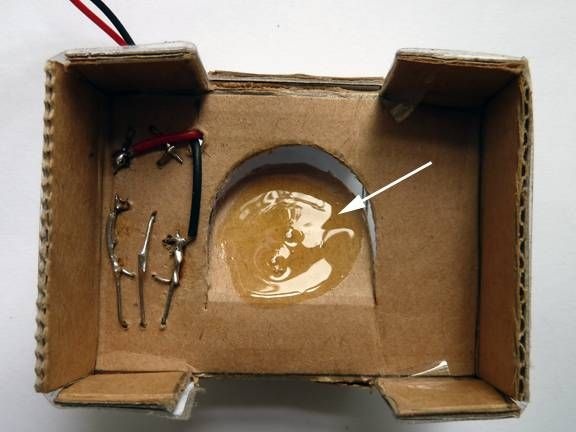
El motor está montado sobre pegamento, el lugar de lubricación está marcado con una flecha blanca. Después de aplicar el pegamento, debe esperar un poco para que se vuelva viscoso, de lo contrario, el pegamento líquido puede ingresar al motor y arruinarlo.
Para una fijación adicional, el motor está envuelto con cinta adhesiva.


En cuanto al ángulo del robot, todo esto es claramente visible en las imágenes. Después de la instalación, el motor debe estar conectado. Un pin está conectado al signo menos y el otro al drenaje del transistor VT1.


Paso seis La etapa final de la asamblea.
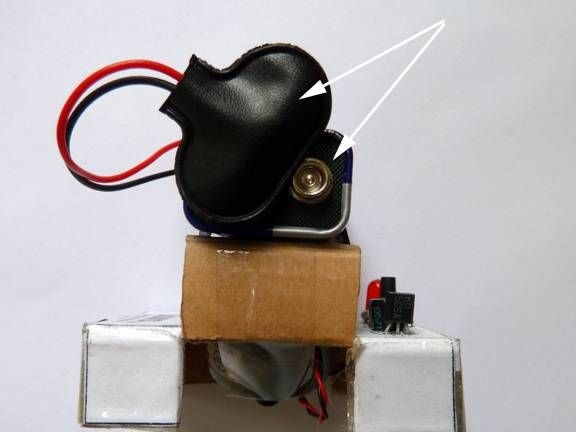
La batería está montada en un marco en forma de U, la batería se fija con cinta aislante. El marco está pensado de tal manera que, además del soporte, también es un amortiguador para la batería. Si el robot necesita estar completamente desconectado de la fuente de alimentación, puede desconectar un cable de la batería.
Bueno, en conclusión, para la competencia necesitarás un anillo, está hecho de dos capas, con un grosor de al menos 3 mm. Si no se cumple esta condición, el robot no podrá detenerse en el borde del anillo. El diámetro del anillo debe ser de 250 mm. La capa inferior consiste en un cartón corrugado delgado, y la capa superior de cartón negro delgado. Ambas capas deben estar pegadas. La asamblea ha terminado, puedes comenzar la competencia. El ganador es el robot que permanece en el ring.