

El artículo considerará un ejemplo de la creación de un robot legendario llamado "Canbot". La mayor parte de los detalles del robot se imprime en una impresora 3D. El robot se controla de forma remota.
Materiales y herramientas para hecho en casa:
- Un microcontrolador Atmel Attiny85;
- dos microservicios HXT900 o sus análogos;
- una batería de 3.7V LiPo;
- un receptor de infrarrojos a 38 kHz;
- transductor ultrasónico tipo HC-SR04;
- Interruptor o puente de 9x4 mm en su lugar;
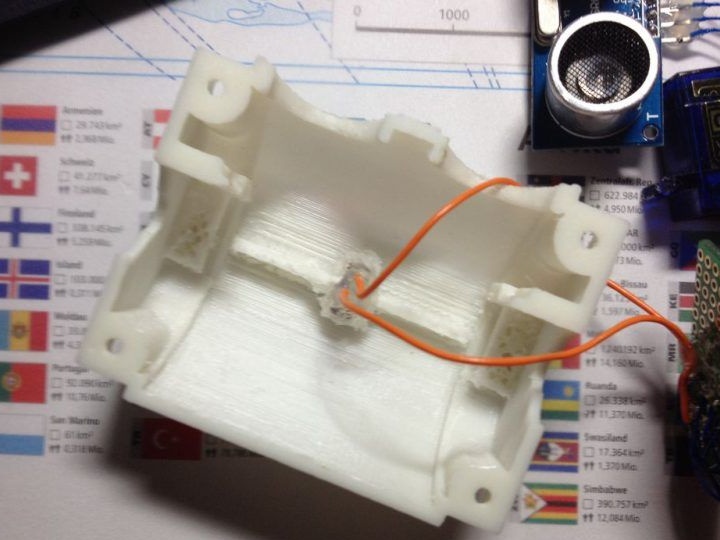
- Piezas en 3D (posible). Tomará una parte superior (top.stl), una inferior (bottom.stl) y dos ruedas (wheel.stl).
Por supuesto, se necesitarán herramientas de soldadura, pegamento caliente, destornilladores, tornillos, alambres y otras pequeñas cosas.

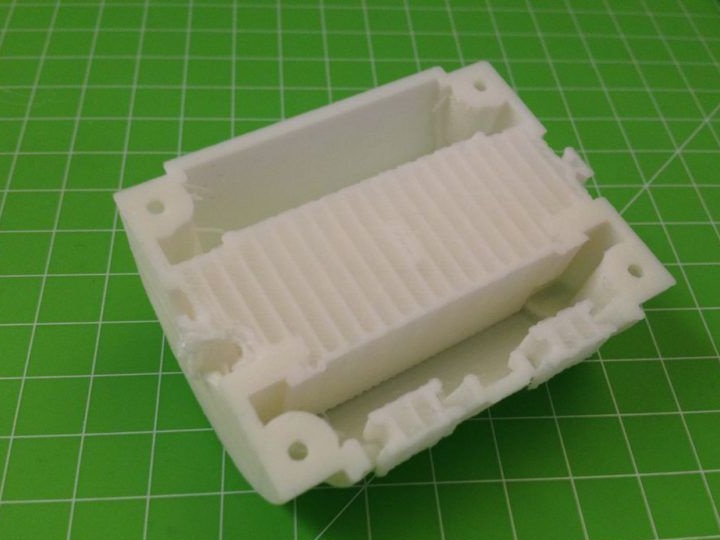
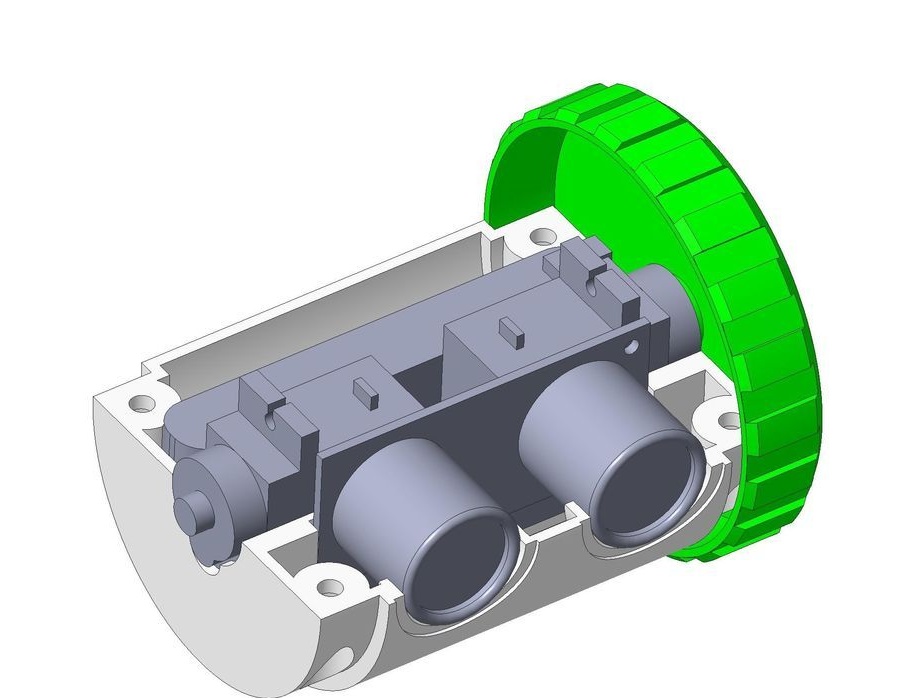
Las partes superior e inferior deberán imprimirse con el lado plano hacia abajo utilizando la opción "estructuras de soporte". Dependiendo del tipo de impresora utilizada, es posible que las partes terminadas deban limpiarse al final.
El proceso de fabricación del robot:
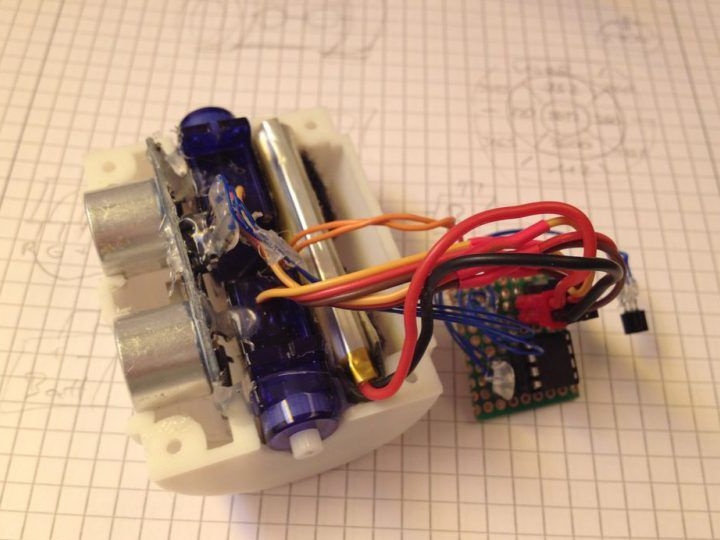
Primer paso Electrónica parte del robot
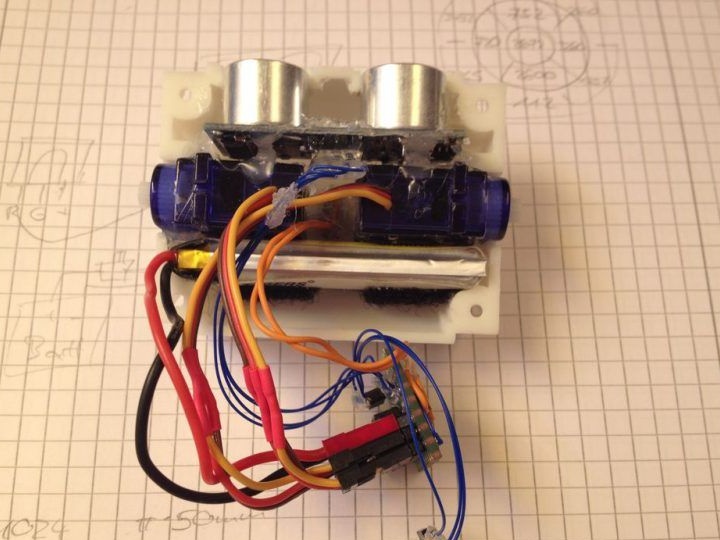
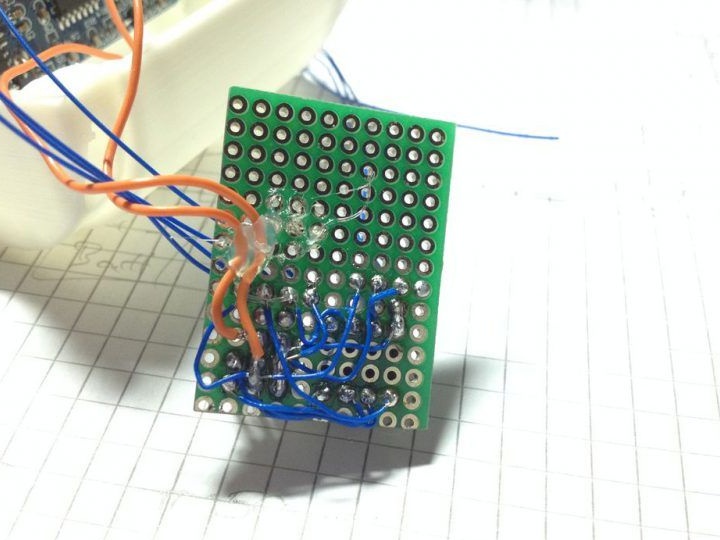
Primero debe configurar los servos, deben convertirse a rotación continua. Cómo hacer esto, hay toneladas de instrucciones en Internet. Bueno, entonces todos los elementos electrónicos deberán ensamblarse como se indica en el diagrama. Para ensamblar la parte electrónica fue conveniente, puede tomar un pequeño pedazo de una placa de prueba, así como cables delgados.


Paso dos La parte del software del robot.
Si aborda el proceso de creación de un robot con la más alta profesionalidad, la parte del software se puede escribir de forma independiente. Pero para esto necesitarás aprender un lenguaje de programación. En una versión más simple, puede descargar el código listo y simplemente subirlo al microcontrolador.
Según el autor, lo mejor el robot recibe señales infrarrojas de los controles remotos de la marca Sony. En el futuro, será necesario "actualizar" la parte del código Arduino y generar los datos a través de la función Serial.print (). Como resultado, será posible averiguar qué codificación hay en cada botón.
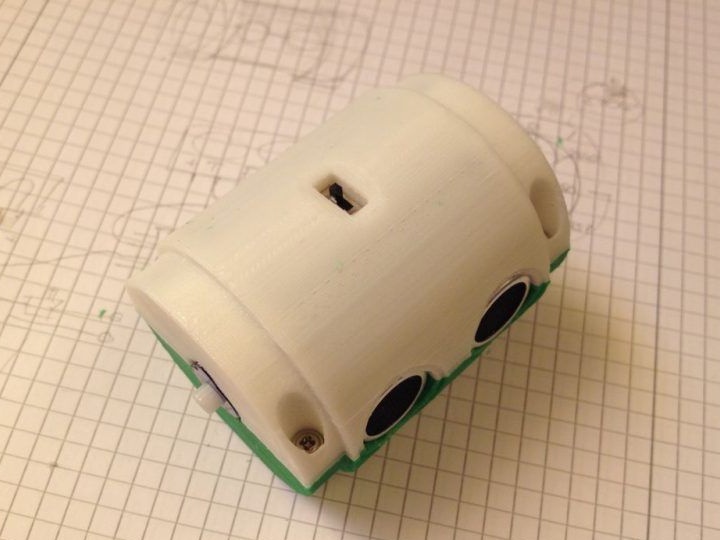
Paso tres La etapa final. Ensamblar el robot
Bueno, en conclusión, el robot se va. Para estos fines, necesitará pegamento caliente. Con él, debe arreglar los cables para que no se salgan cuando el robot se mueva.También es necesario arreglar el interruptor y arreglar bien el sensor ultrasónico. En conclusión, las cubiertas del robot están conectadas con cuatro tornillos, como resultado, si es necesario, se puede desmontar fácilmente. Por cierto, los tornillos para servos son perfectos para el montaje.

Eso es todo, ahora el robot está casi listo. Queda por instalar las ruedas en los ejes del servomotor y puede comenzar a probar el robot. Puedes ver con más detalle cómo funciona el trabajo casero en el video.