Hoy quiero compartir mi próximo hecho en casa. Se basa en Lego y Arduino. Para el control, utilizaremos un control remoto con un transmisor de 433 MHz. Esta vez quise hacer una carrera un carro. Proceder:
- Lego Technic 42022
- Arduino Nano
- DRV 8833
- Servo SG-90
- Módulo de comunicación por radio de 433 MHz
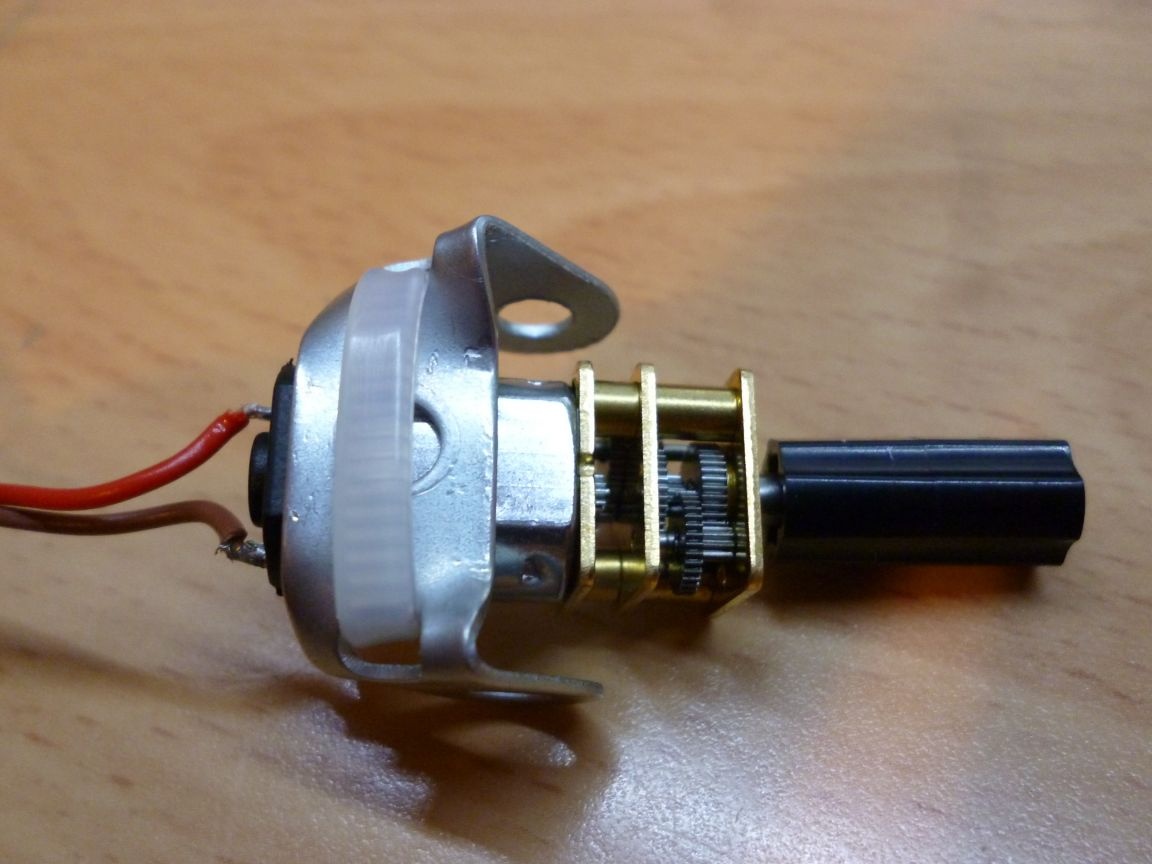
- Motor reductor 200 rpm, con un diámetro de eje de 3 mm.
- 2 LED
- 2 resistencias 150 ohmios
- Condensador 10v 1000uF
- 2 peines de una hilera PLS-40
- 2 conectores PBS-20
- Inductor 68mkGn
- 6 baterías NI-Mn 1.2v 1000mA
- Conector papá-mamá de dos pines para cablear
- Homutik
- Alambres de diferentes colores.
- soldadura
- Resina
- soldador
- Pernos 3x40 y tuercas y arandelas para ellos.
- Pernos 3x20
Paso 1 ensamblar el caso.
Es necesario ensamblar nuestra máquina de acuerdo con las instrucciones de Lego 42022, la segunda opción con cierto refinamiento. Realizamos todas las acciones de la página 3 a la 6. No necesitamos un mecanismo de engranajes. El motor Lego tampoco necesita ser ensamblado. Sin embargo, necesitará montajes de motor recogidos en las páginas 14-19, a excepción de engranajes y ejes. A continuación, recopilamos todo, desde las páginas 20 a la 74, excepto la palanca de la página 25.
Paso 2 mecanizar el cuerpo.
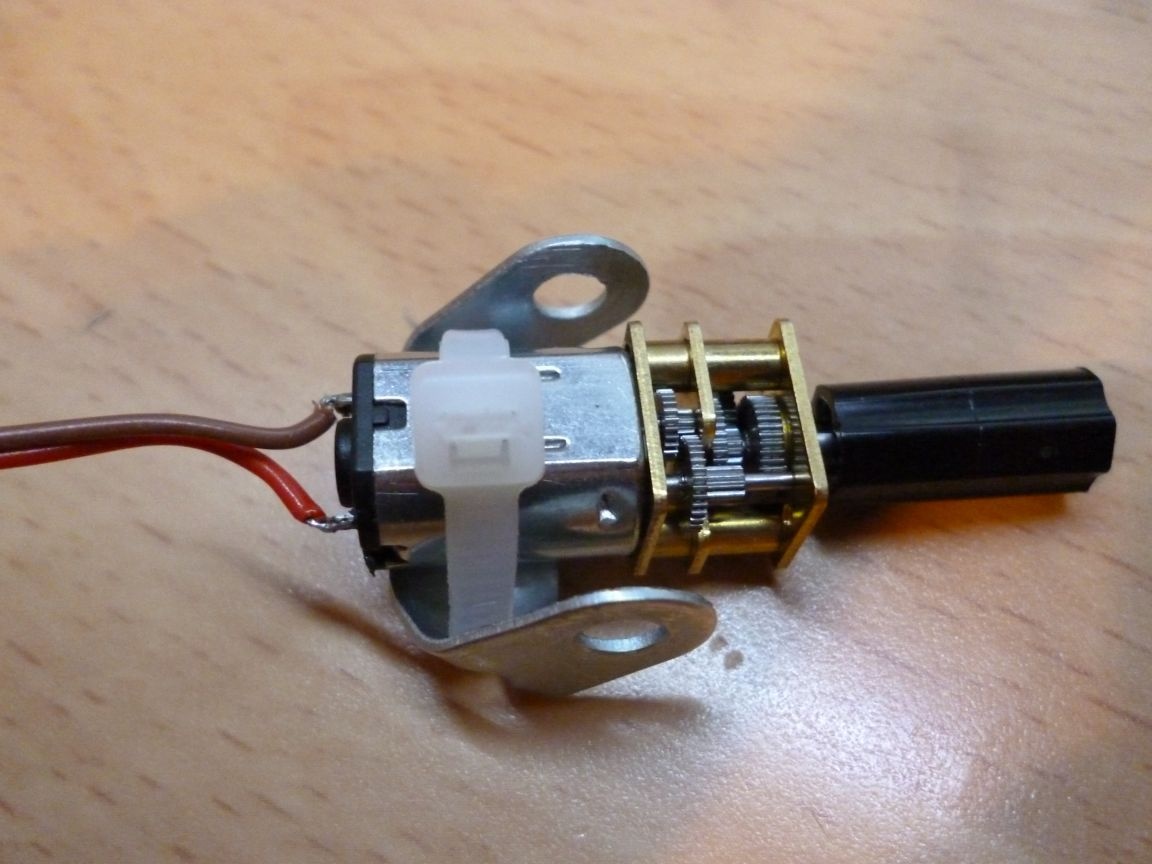
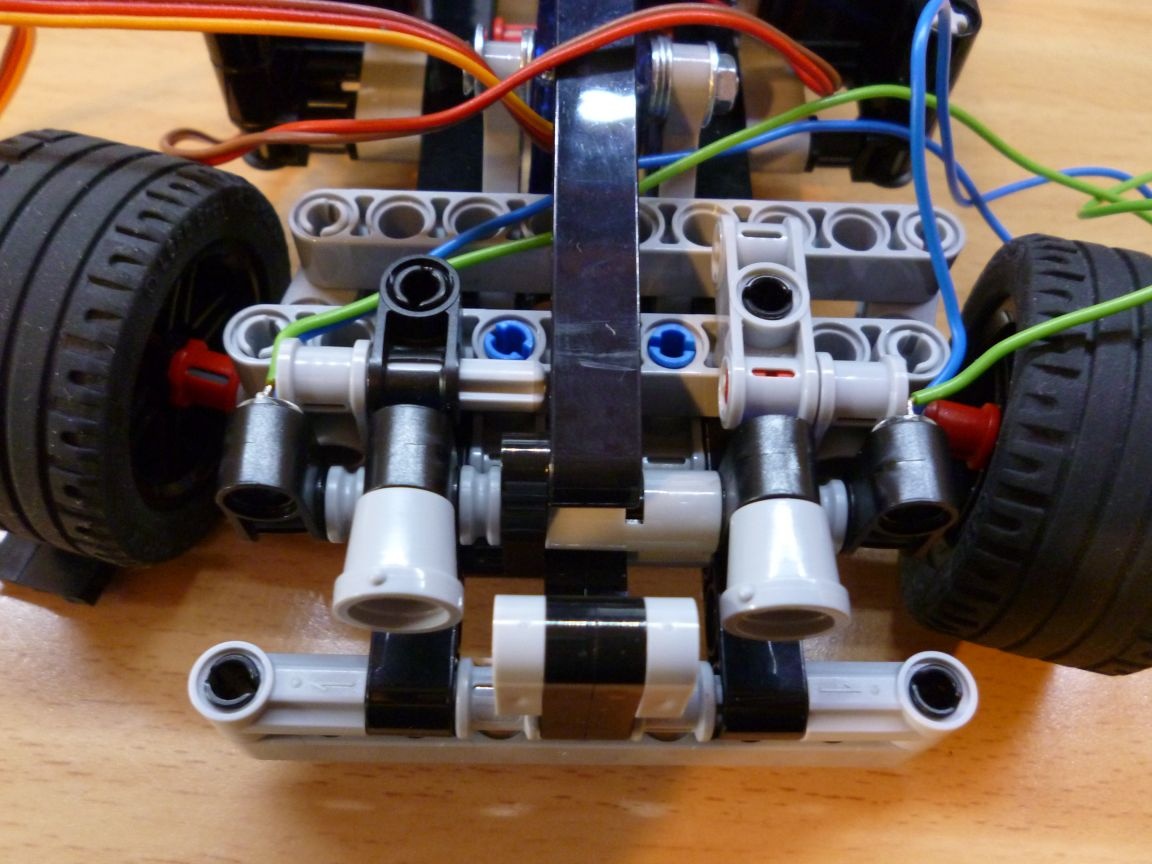
Poner en marcha nuestro el modelo Habrá un motorreductor con una velocidad de 200 rpm. Se puede usar con una relación de transmisión diferente. Pero, en mi opinión, esta es la mejor opción. A 100 rpm, demasiado lento, 300 rpm, no hay suficiente potencia y el motor está muy caliente. En el eje del motorreductor, colóquese el manguito de conexión "Legovskaya" y asegúrelo para no torcer el fósforo con un borde. Para fijar nuestro motor en el modelo, es necesario doblar la parte del constructor de metal con la letra "P" y unir el motor de engranajes a la placa con una abrazadera. El resultado debería ser el siguiente:
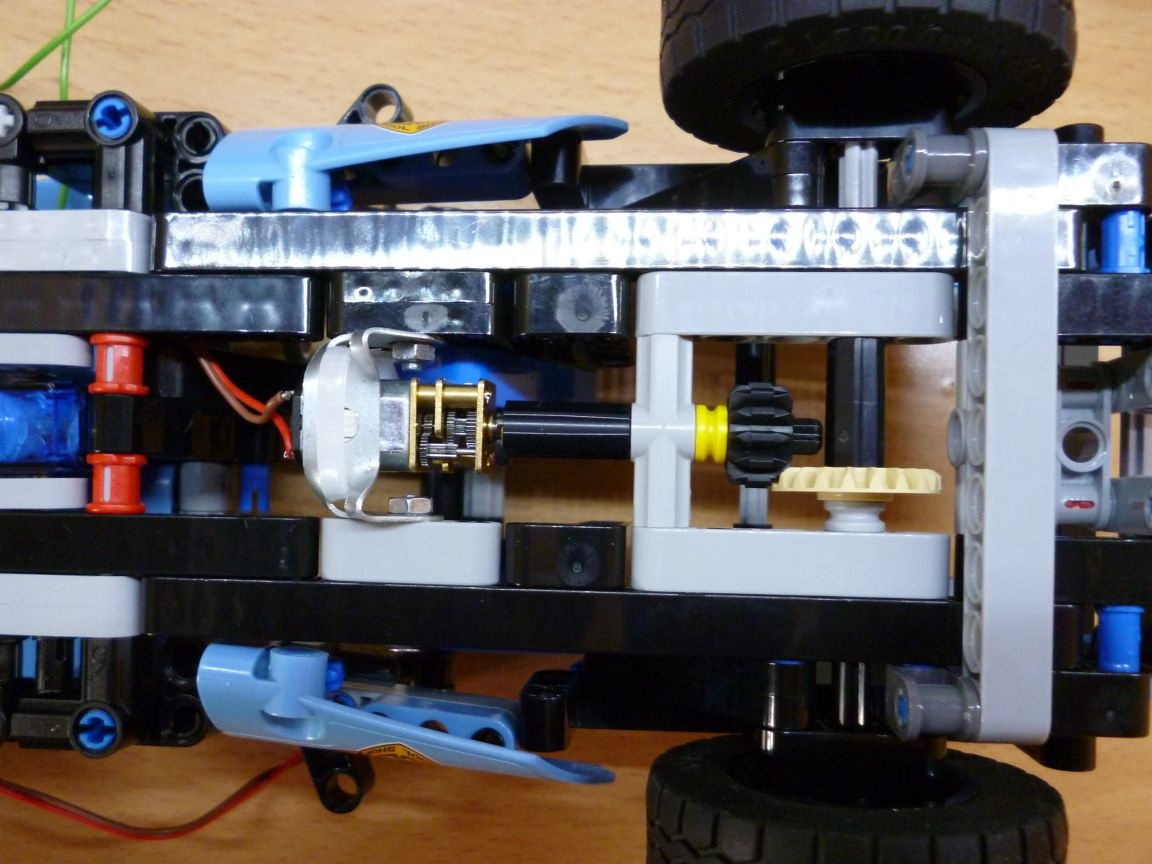
Con la ayuda de pernos 3x20 fijamos nuestro motor al modelo. ¡No aprietes demasiado! De lo contrario, puede dañar las piezas de construcción de Lego. En el modelo, se ve así:
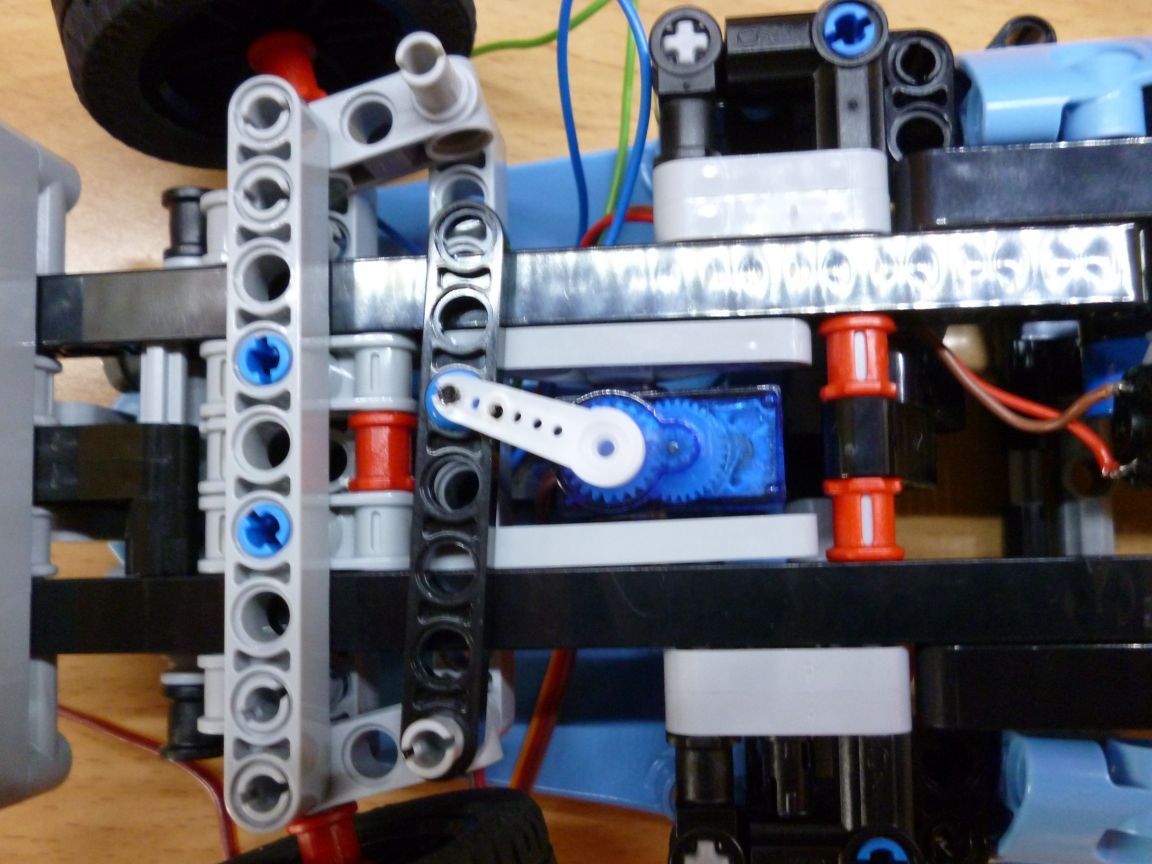
Para hacer el giro, tome un servo SG-90 ligeramente modificado. La caja debe perforarse cuidadosamente para no tocar las partes internas, el orificio pasante con un diámetro de 3,2 mm o simplemente cortar con un cuchillo de oficina.

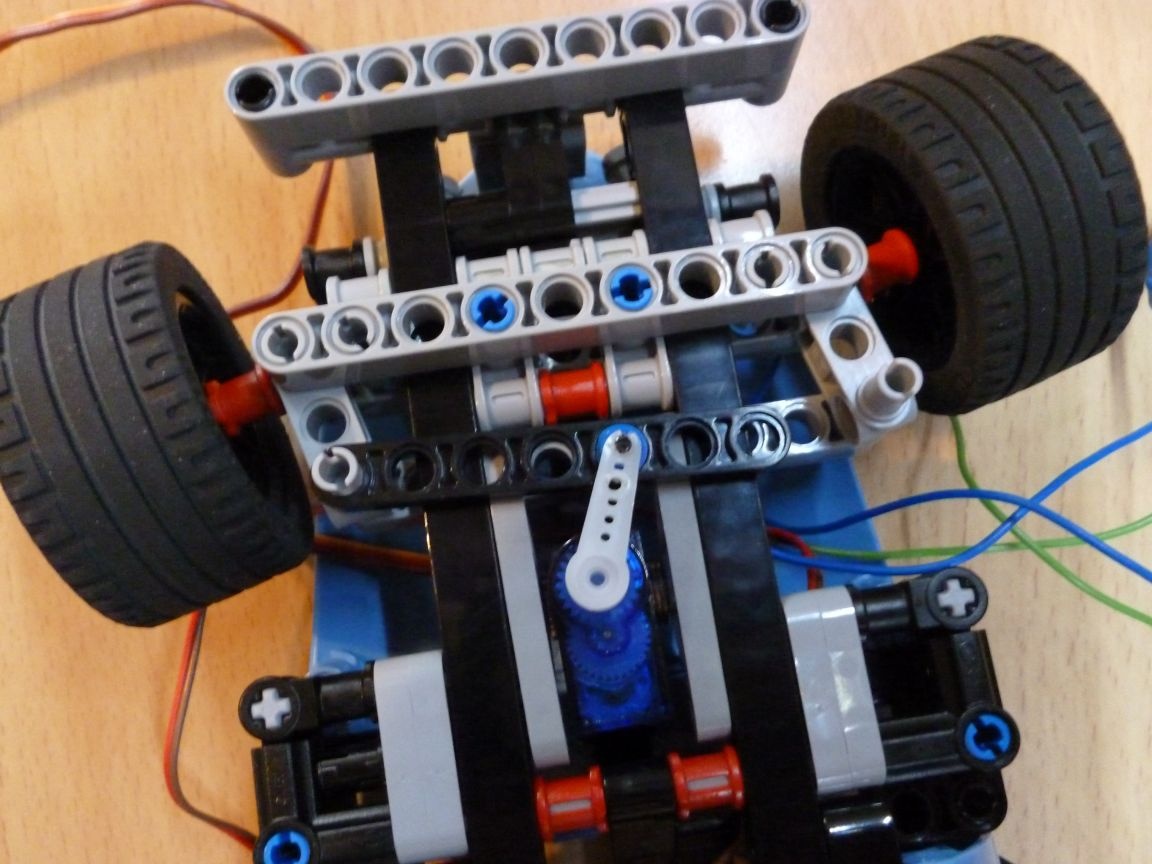
Insertamos un tornillo en el agujero hecho, y en los bordes colocamos placas triangulares y lo fijamos con tuercas. Ponemos la palanca en el eje del servo y sujetamos la pieza a la palanca Lego. En una máquina de escribir, se ve así:
El paso 3 es un electricista.
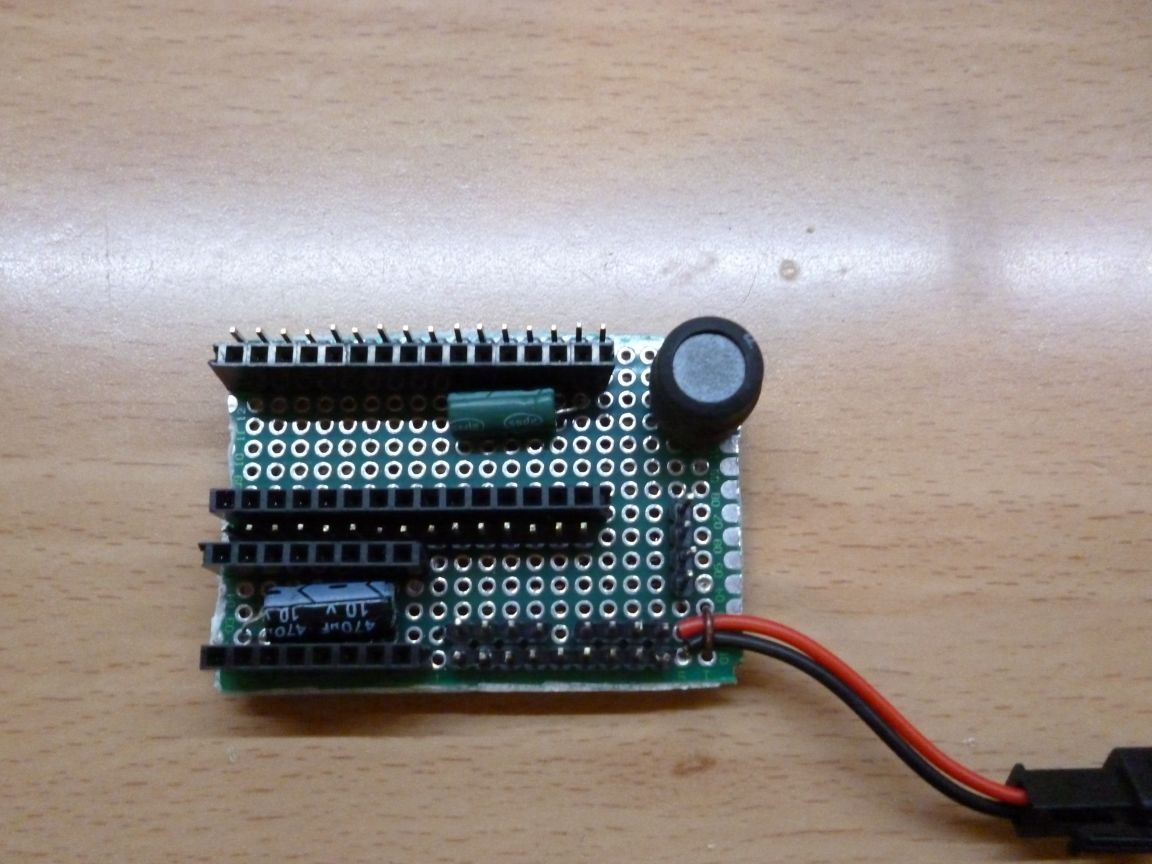
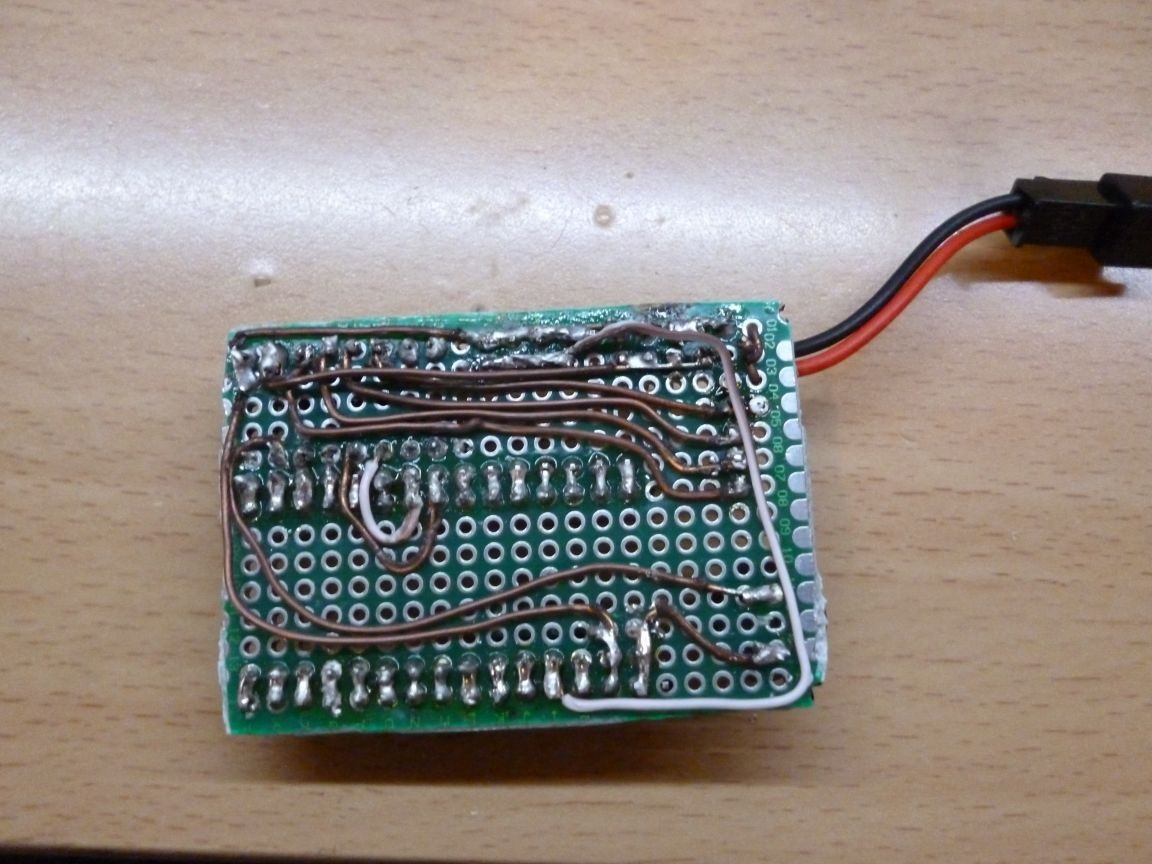
Soldador en mano y listo. Todos los sistemas eléctricos se pueden ensamblar simplemente conectando los cables de montaje. Pero esto es inconveniente, ya que requiere mucho espacio. Además, existe una alta probabilidad de contacto de baja calidad. Por lo tanto, es mejor soldar todo en la placa de circuito de acuerdo con el siguiente esquema:
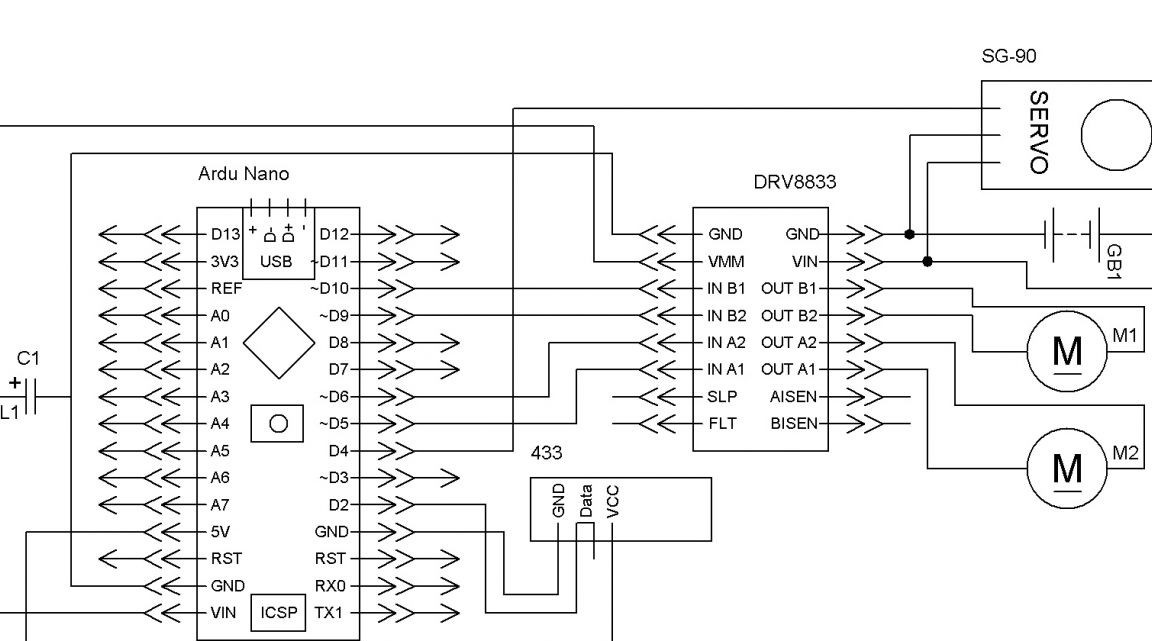
Le daré un poco de claridad: puede tomar cualquier condensador de baja potencia, también puede encontrar un inductor de cualquier tipo, esto es necesario para estabilizar el voltaje del microcontrolador. La antena debe estar soldada al receptor. Tengo lo siguiente:
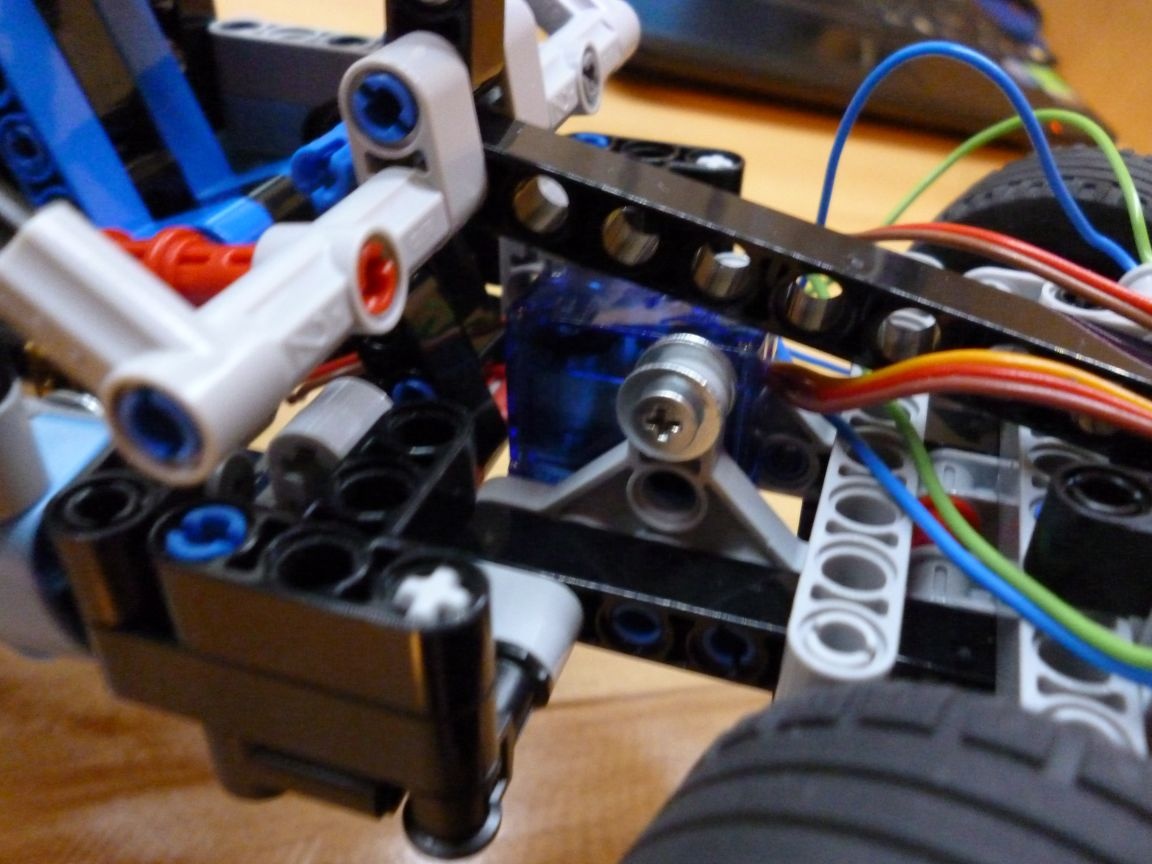
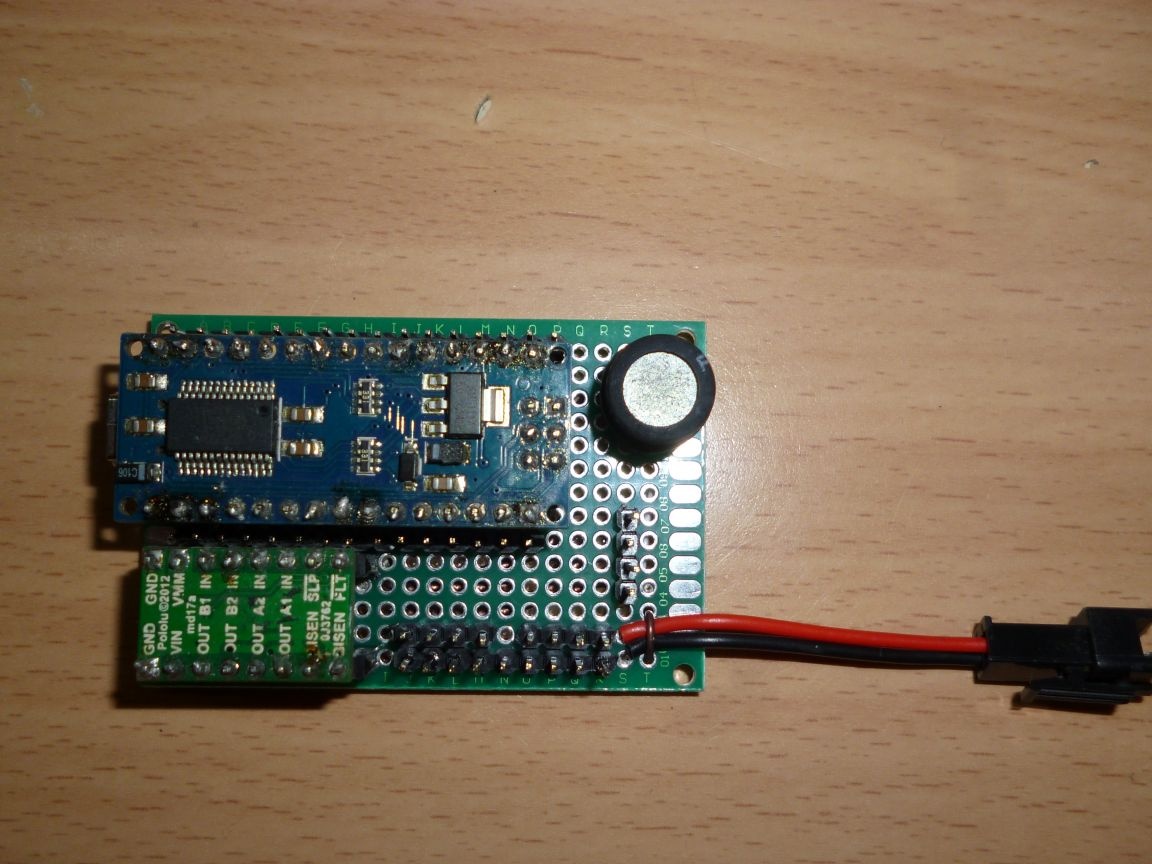
Ponemos a Arduino Nano y DRV 8833 en sus lugares:
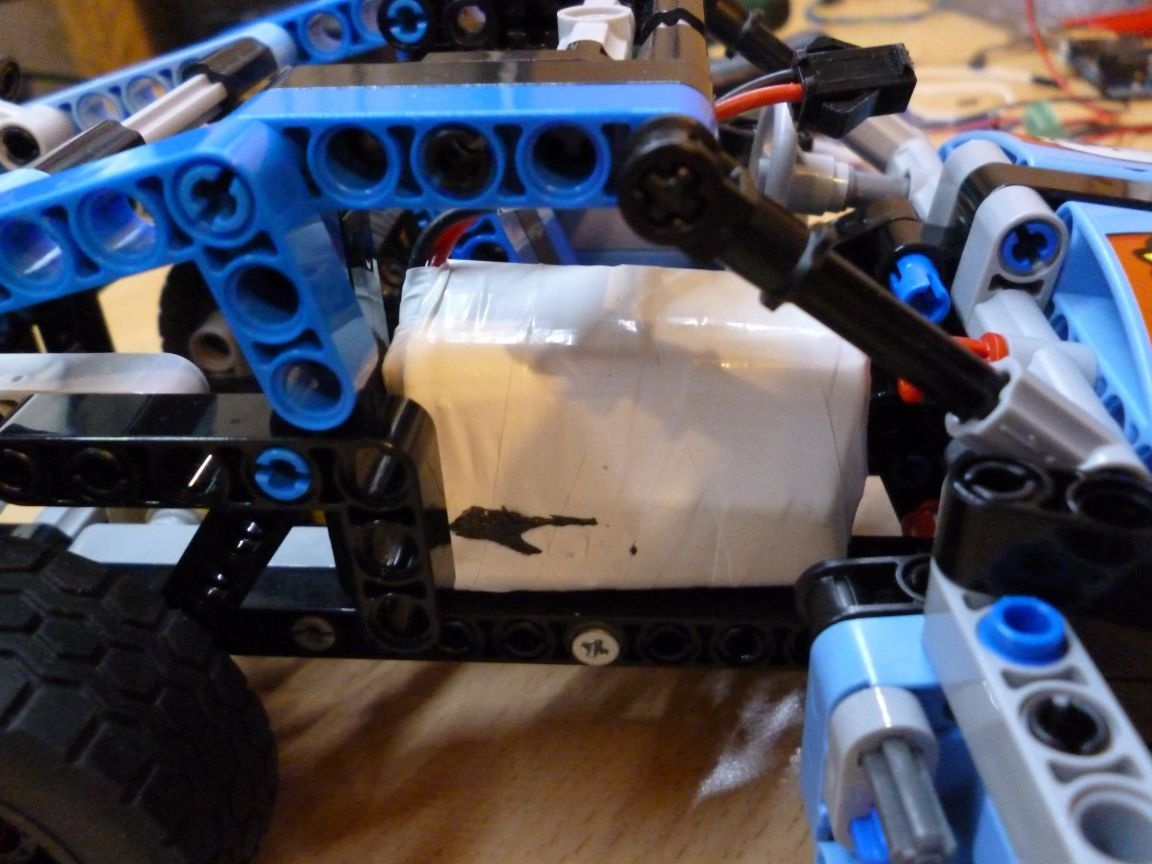
Para la alimentación, utilizaremos 6 baterías Ni-Mn 1.2v 1000mA, soldadas en serie y enrolladas con cinta aislante. Péguelos en un asiento de pasajero con cinta adhesiva de doble cara.

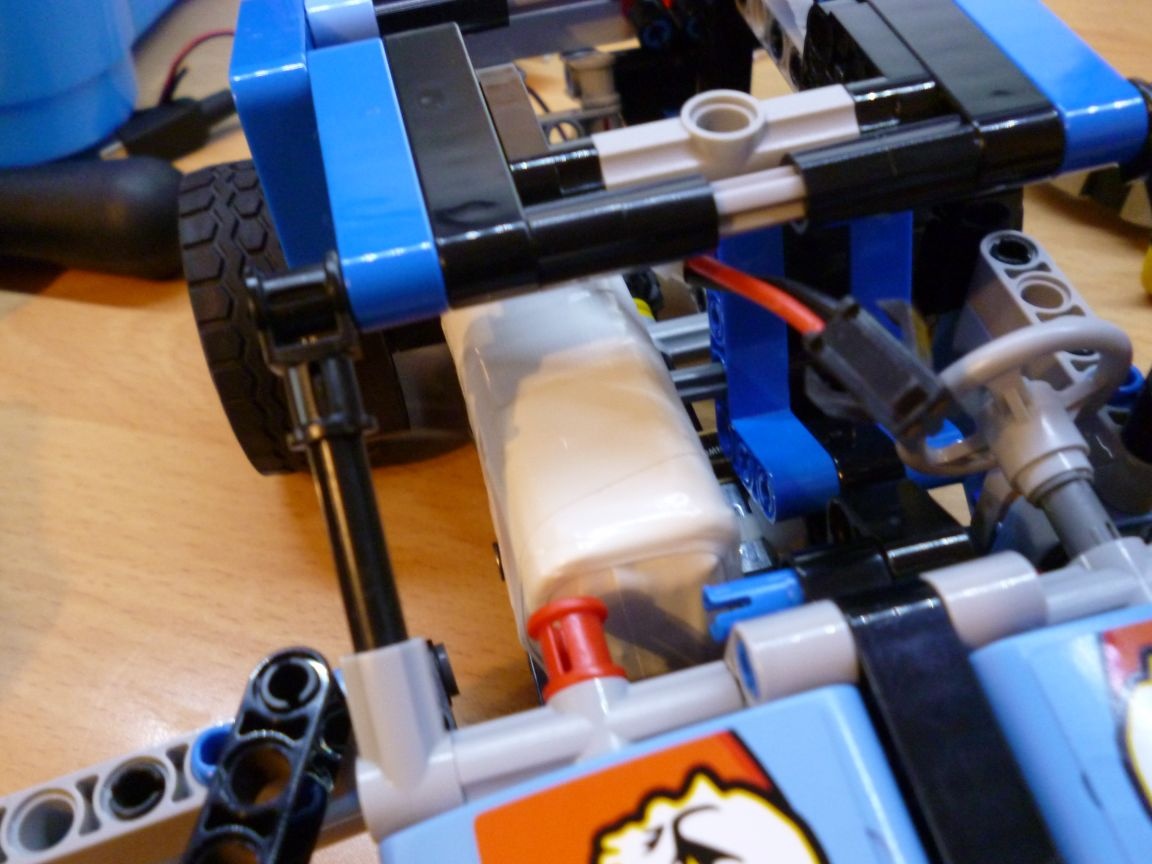
Conectamos todo de acuerdo con el esquema y lo instalamos en la parte posterior de la máquina. También puede agregar un par de LED. Póngalos en los faros y conéctelos al pin 14 (A2).
Paso 4 firmware.
Para escribir el firmware, utilicé el IDE de Arduino. La versión actual al momento de escribir es 1.8.1. Es conveniente implementar el protocolo de comunicación usando el módulo de 433 MHz usando la biblioteca rc-switch-2.52. Debe descargarlo y agregarlo a la carpeta "bibliotecas" del IDE de Arduino.
Conectamos el Arduino y lo flasheamos con el siguiente firmware:
Para probar el rendimiento de nuestro modelo, necesitamos una segunda placa Arduino. Es necesario conectar un transmisor de radio de 433 MHz a la segunda placa. El transmisor está conectado de la siguiente manera:
VCC (transmisor) a 5+ (Arduino),
GND a GND,
DATOS a D10.
Escriba el boceto SendDemo modificado allí. Está en los ejemplos de la biblioteca que instalamos y sirve para enviar comandos. Antes de actualizar el boceto, debe cambiarlo ligeramente, es decir, cambiar los comandos transmitidos. Dependiendo de lo que necesite verificar, escriba los siguientes comandos en la línea de envío:
"1" - movimiento hacia adelante (¡escribe un comando sin comillas!)
"2" - movimiento hacia atrás
"15" - punto final
"3" - gire el volante hacia la izquierda
"4" - gire el volante hacia la derecha
"5" - coloca el volante en el medio
"10" - enciende los faros
"11" - apaga los faros
Hacer un control remoto con un transmisor de radio de 433 MHz es un tema para un artículo separado. Definitivamente escribiré las instrucciones para la fabricación de dicho control remoto.
Quiero decir que esta opción es adecuada para casi cualquier modelo de automóviles Lego. Es suficiente conectar todas las mecánicas y encontrar un lugar para el tablero. Y si incluye fantasía, puede mecanizar cualquier modelo.