

¡Buenos días amantes de Arduino! En Internet, vi un robot bastante interesante y espectacular (o dispositivo, llámalo como quieras) que "juega" el juego Stak, usando los mismos principios operativos que puedes hacer un robot que pueda jugar juegos como tablero de geometría, piano y otros donde solo necesites Asomarse a la pantalla con una secuencia determinada. Lo que hice, evalúe en la encuesta a continuación.
Si alguien está interesado, aquí hay un video del trabajo de este robot:
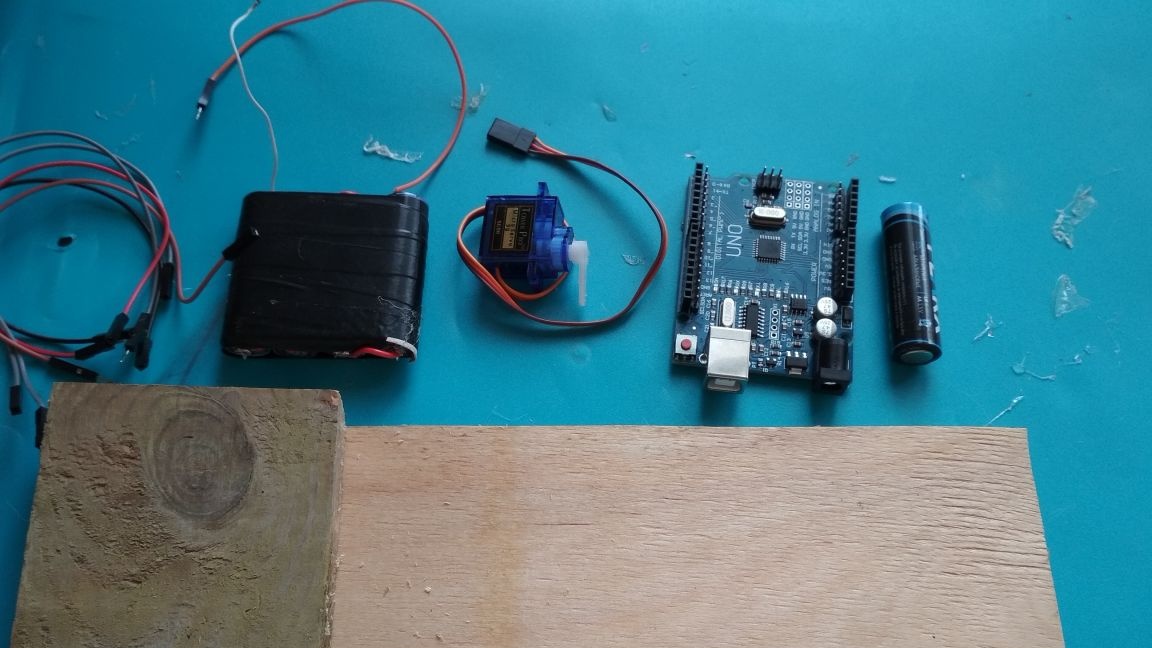
Y para este "robot" necesitamos:
pago Arduino Uno
- cables de conexión como "padre-madre" o "padre-padre"
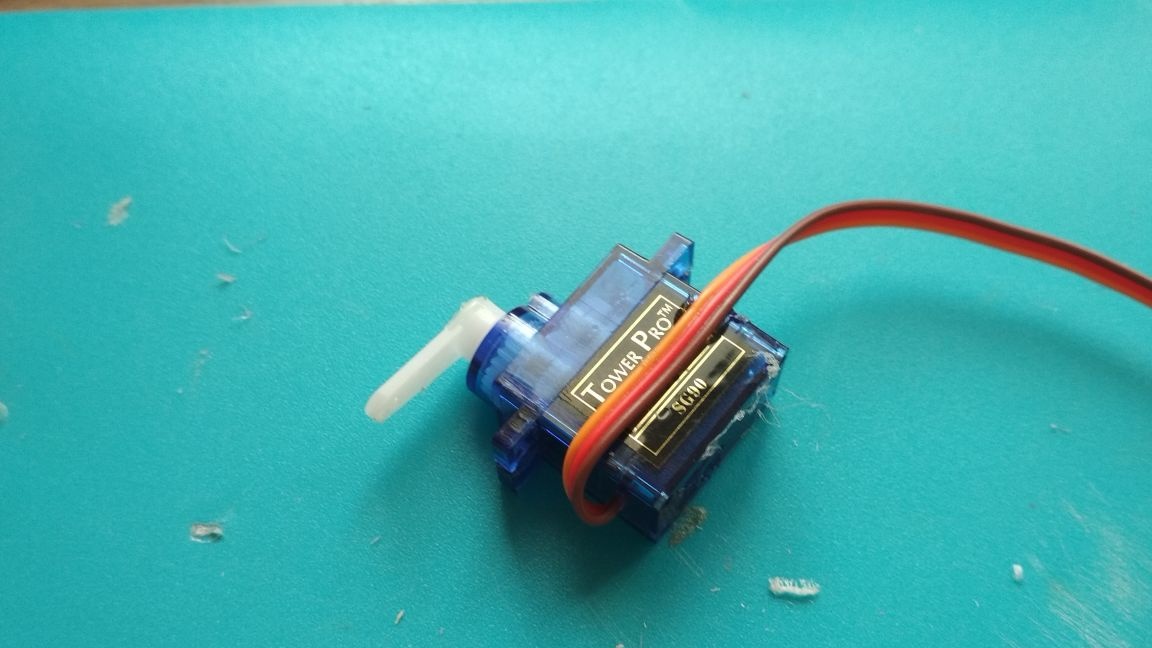
-servicio
- un trozo de madera contrachapada
- un pedazo de tablero de aproximadamente 1 cm de grosor, lo principal es que dos veces es más grueso que la madera contrachapada
palito de helado
stylus
Papel de aluminio (si no hay lápiz)
-batería (si no hay lápiz)
- fuente de alimentación para 6-12 voltios (uso baterías de 4 dedos conectadas en serie)
De las herramientas que necesitamos:
tijeras
pegamento térmico
Entonces, lo primero que debe hacer es cortar una pieza dos veces más grande que su teléfono de una pieza de madera contrachapada, puede hacerla más grande, y debe cortar una pieza del tamaño de su teléfono del tablero (hice tamaños ligeramente diferentes, pero esto no es crítico en absoluto). Luego pegamos nuestros espacios en blanco como se muestra en la foto:

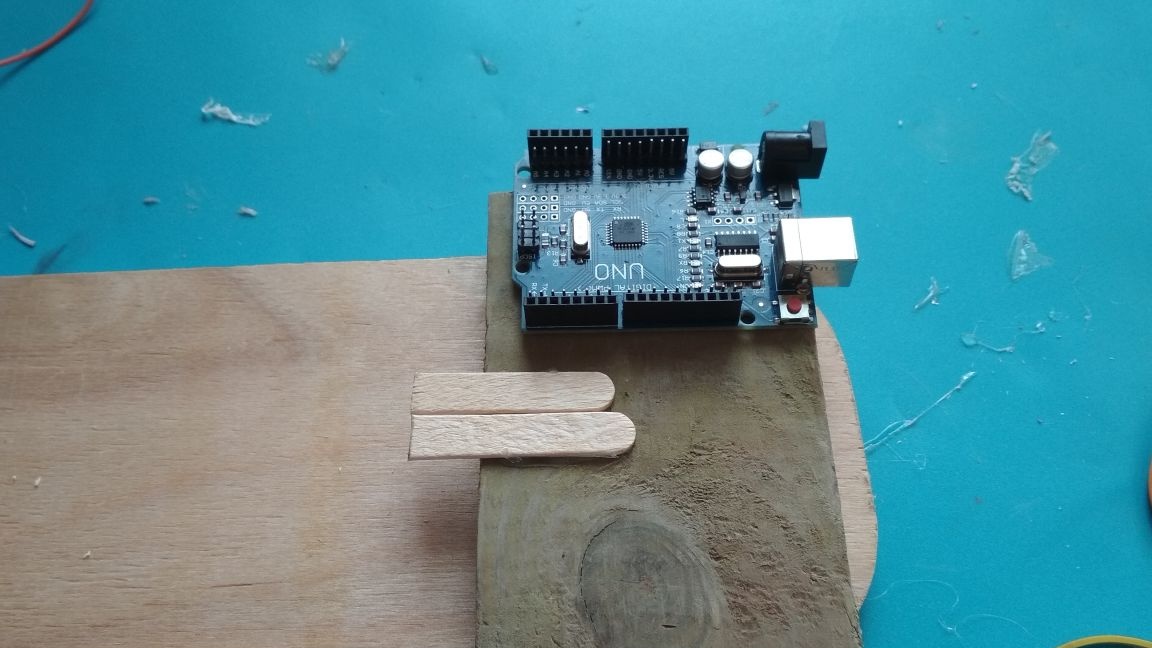
Tome la barra de helado y córtela por la mitad:

Pégalos en el centro del tablero, desde el lado de madera contrachapada, como se muestra en la foto:

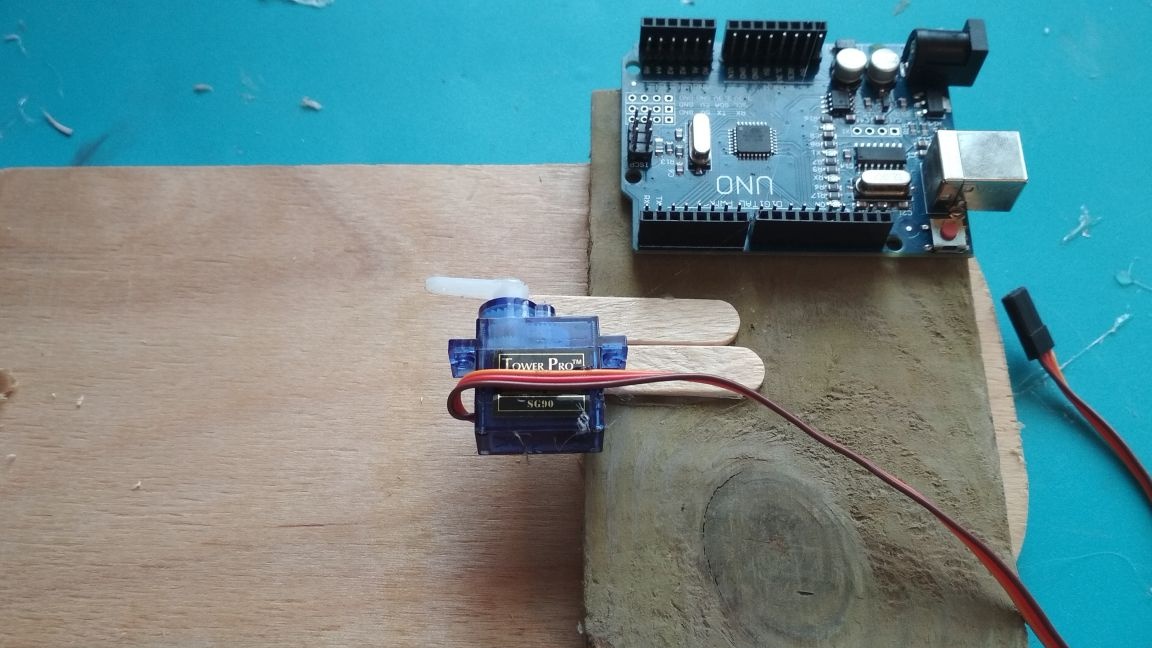
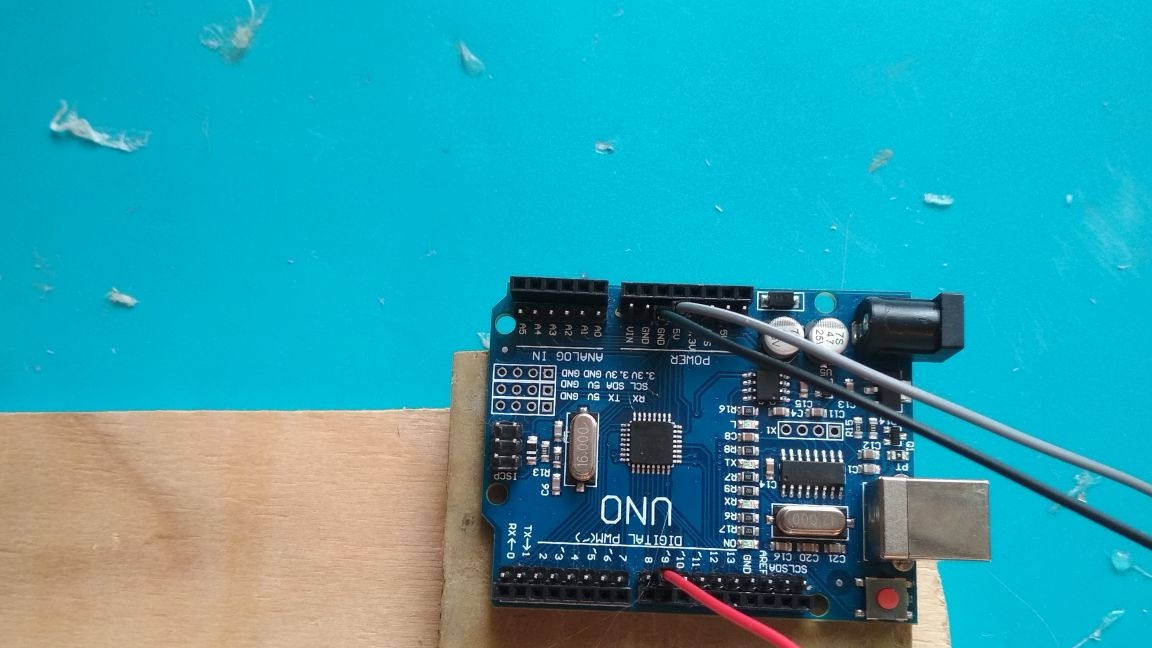
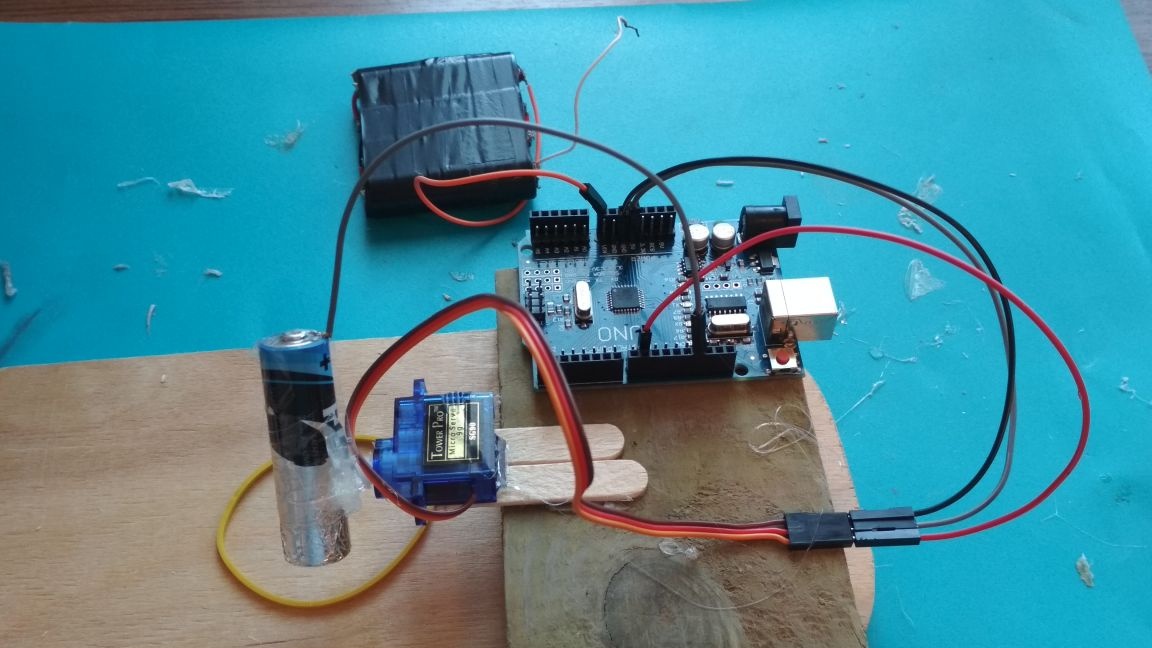
Pegamos el tablero Ardino Uno desde el borde del tablero:
Tomamos el servomotor y pegamos los cables para que no interfieran:
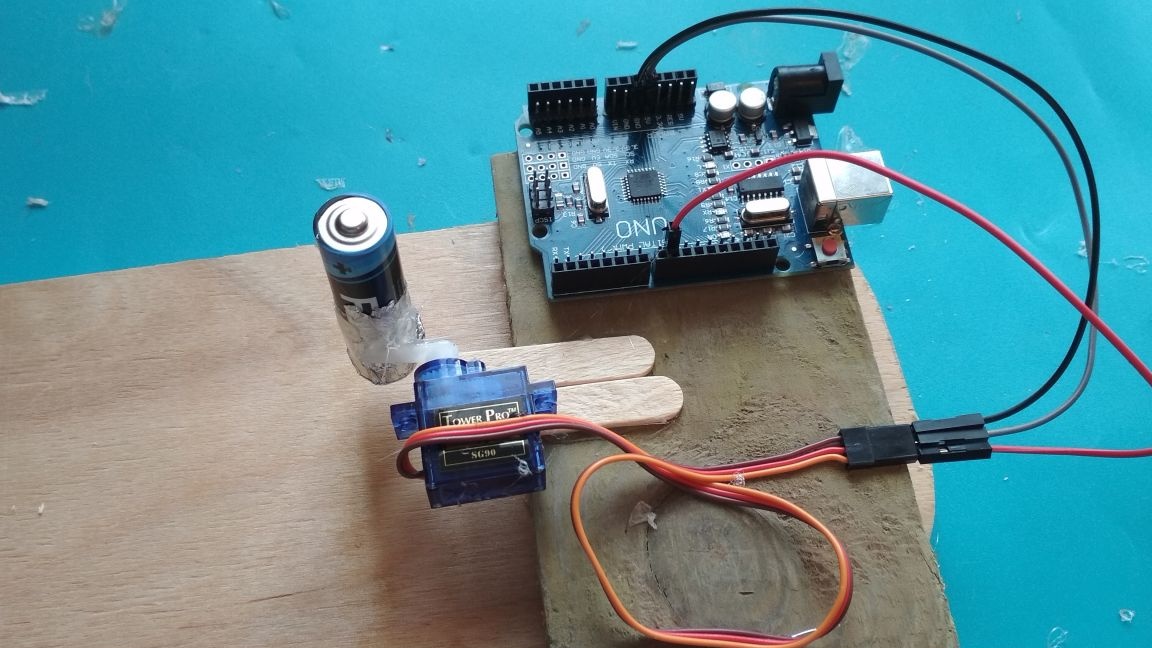
Pegue el servomotor al final de las mitades de los palitos de helado:
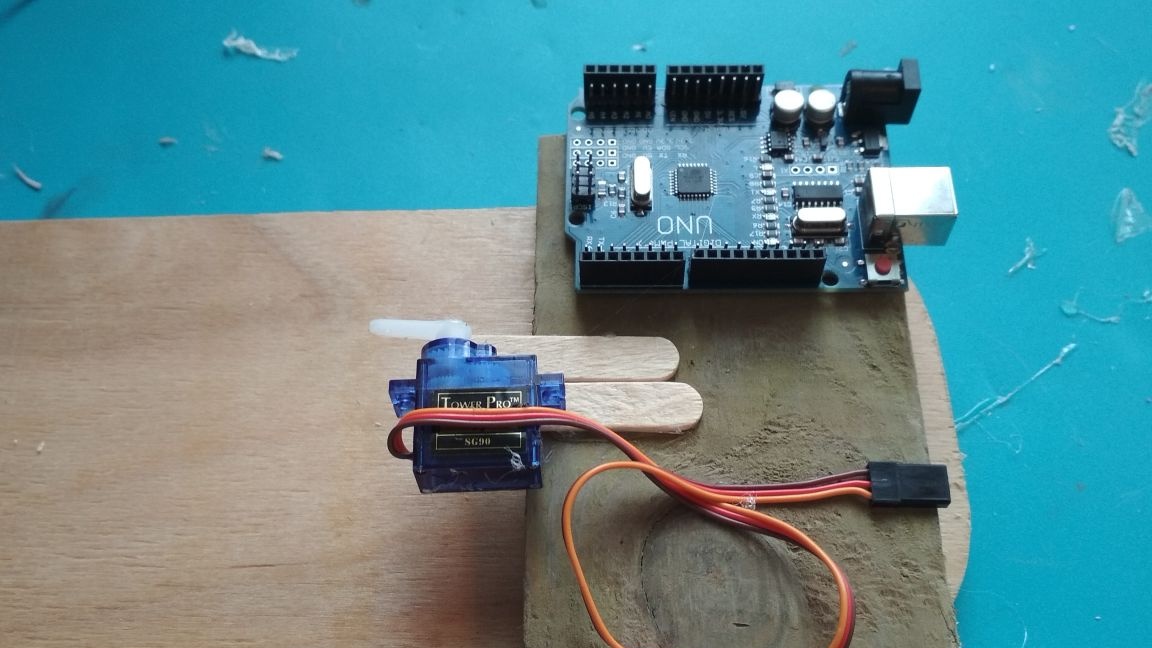
Ponemos los cables y pegamos la salida del servomotor al borde de la placa:
Agregue 3 cables papá-mamá, preferiblemente en diferentes colores, para no confundirse
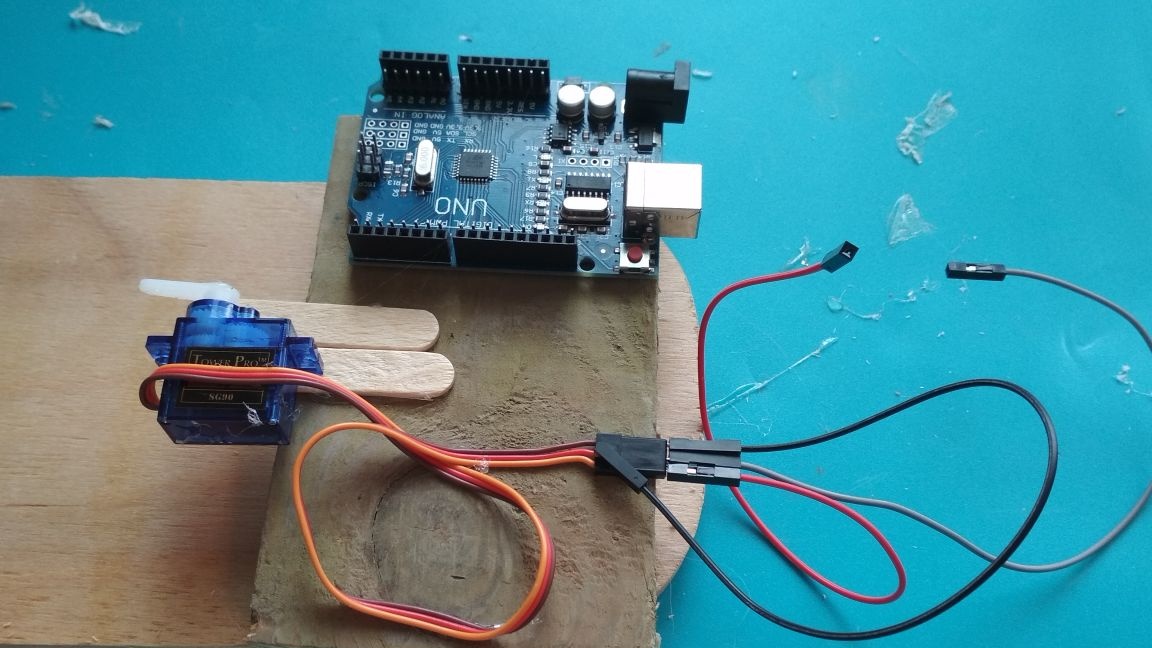
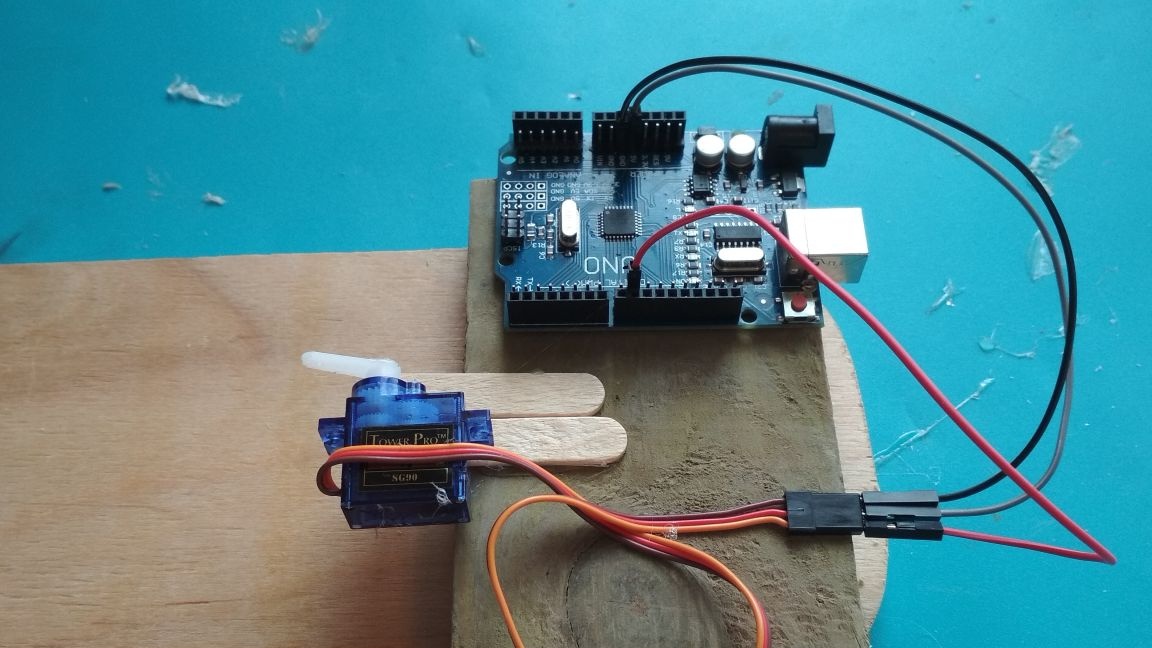
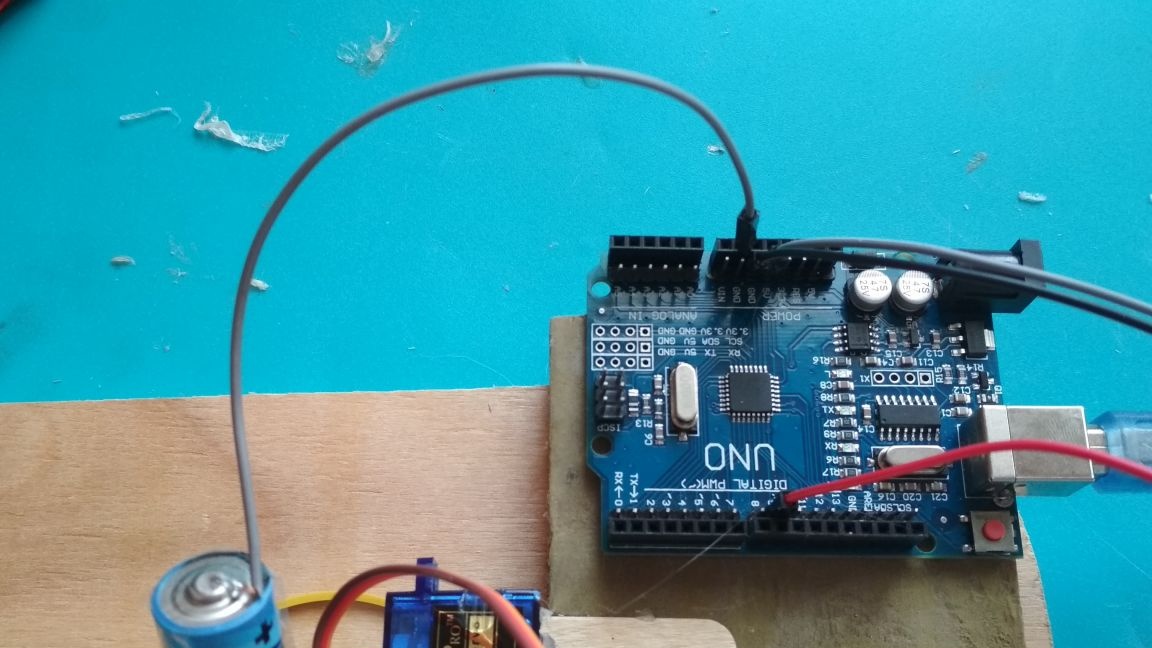
Conectamos el servodrive a la placa Arduino de la siguiente manera:
cable marrón a gnd
-Alambre rojo a 5v
- cable naranja a 9 "pin digital"
Si no tiene un lápiz óptico, como el mío, entonces no se desespere, es muy fácil de hacer.
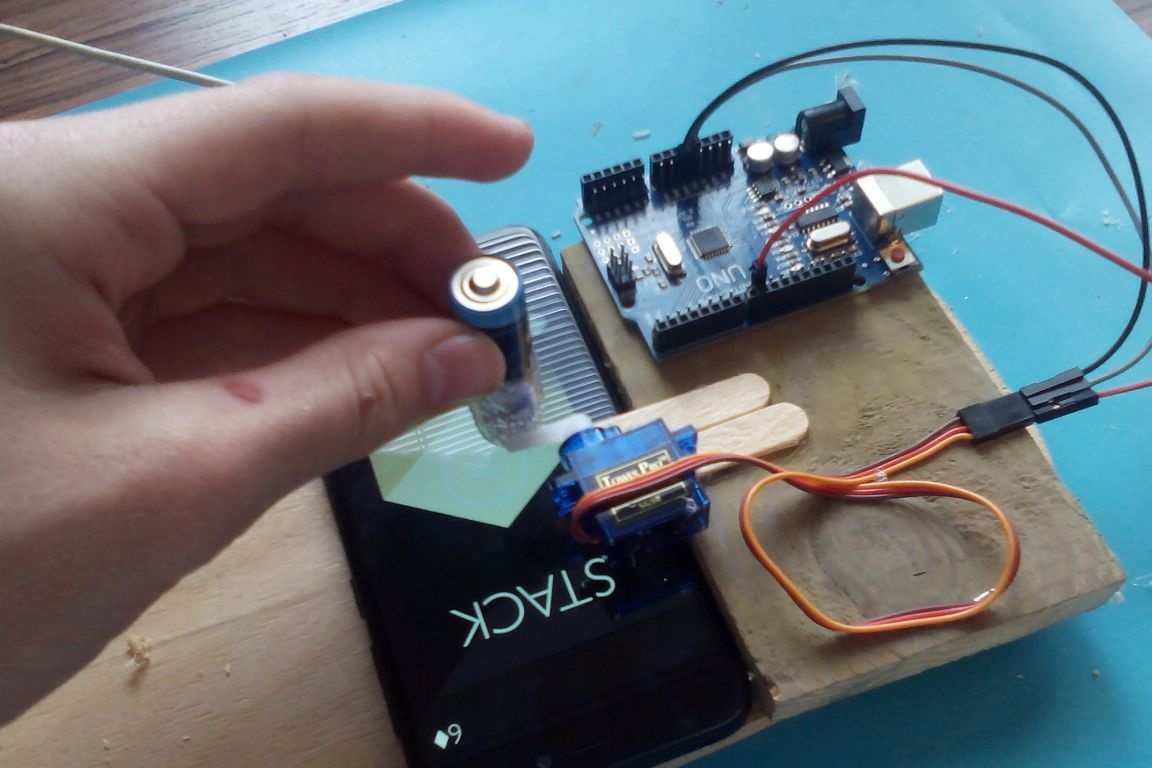
Tomamos una batería de tipo dedo común y el lado negativo lo más apretado posible, lo envolvemos con papel de aluminio y luego lo pegamos muy bien:

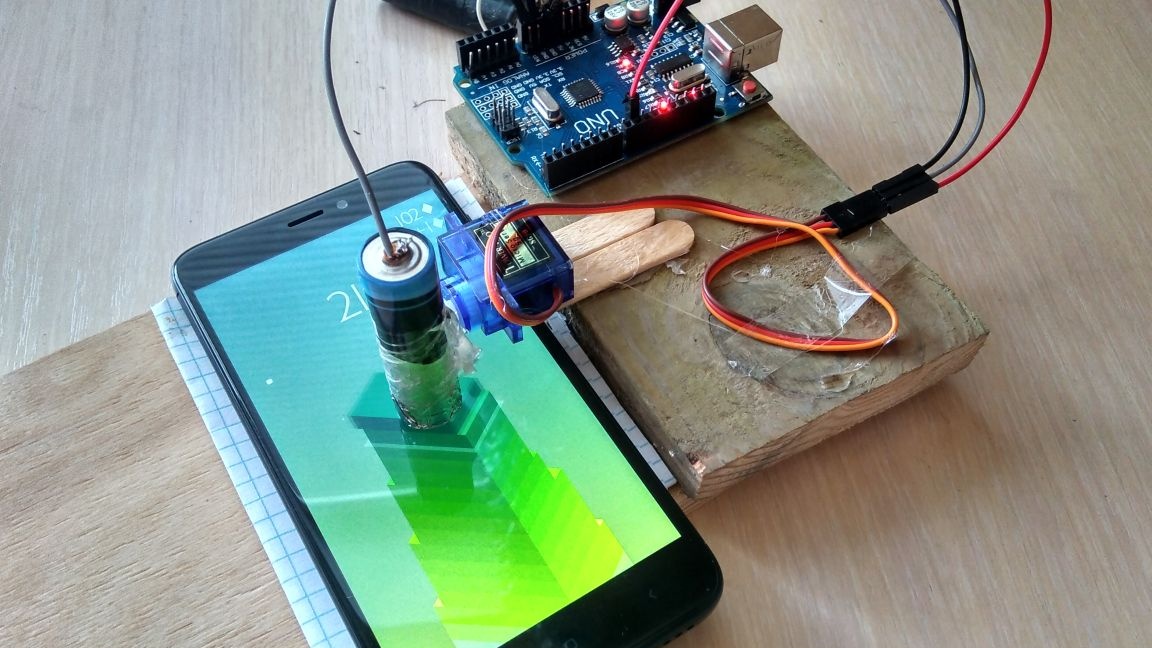
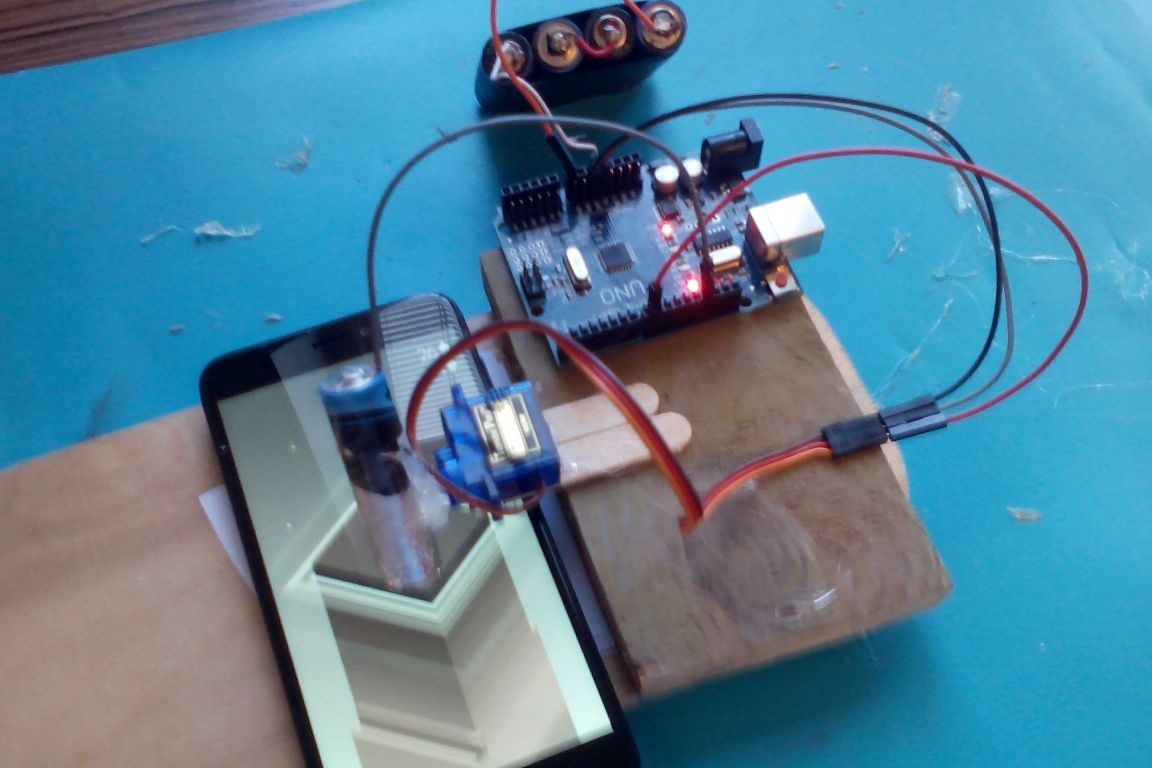
Ahora debe colocar el teléfono en la madera contrachapada debajo del servomotor, colocar la batería en la parte superior y observar a qué nivel colocaremos nuestro "lápiz". Después de que hayamos notado todo, pegue firmemente el "lápiz" a la palanca del servomotor, estrictamente en un ángulo de 90 grados (el mismo ángulo debe ser al aplicar el "lápiz" al teléfono cuando lo medimos). Todo debería funcionar como se muestra en la foto:

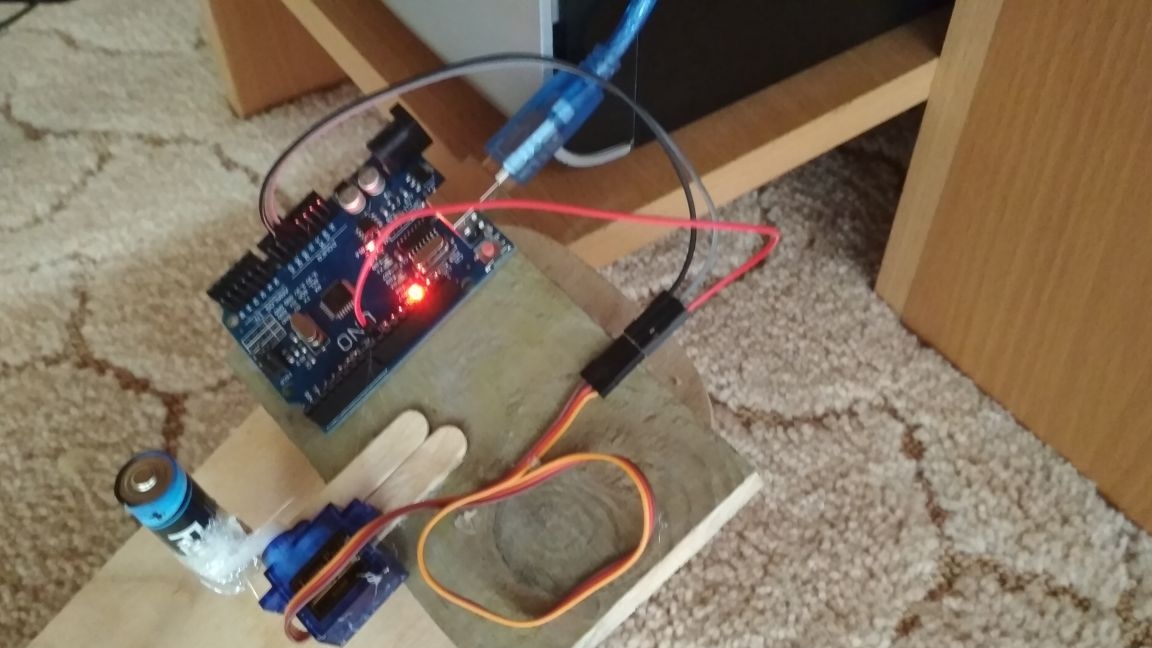
Ahora conectamos nuestro "robot" a la computadora a través del puerto configurado en Arduino IDE, ejecutamos el Arduino IDE previamente nombrado y copiamos el boceto a continuación, luego hacemos clic en el botón "descargar". Si todo se hace correctamente, el boceto se cargará sin errores y después de unos segundos el servomotor comenzará a funcionar. Si tiene diferencias significativas en los tamaños de la aguja y el servomotor, haga este boceto por usted mismo, es bastante simple.
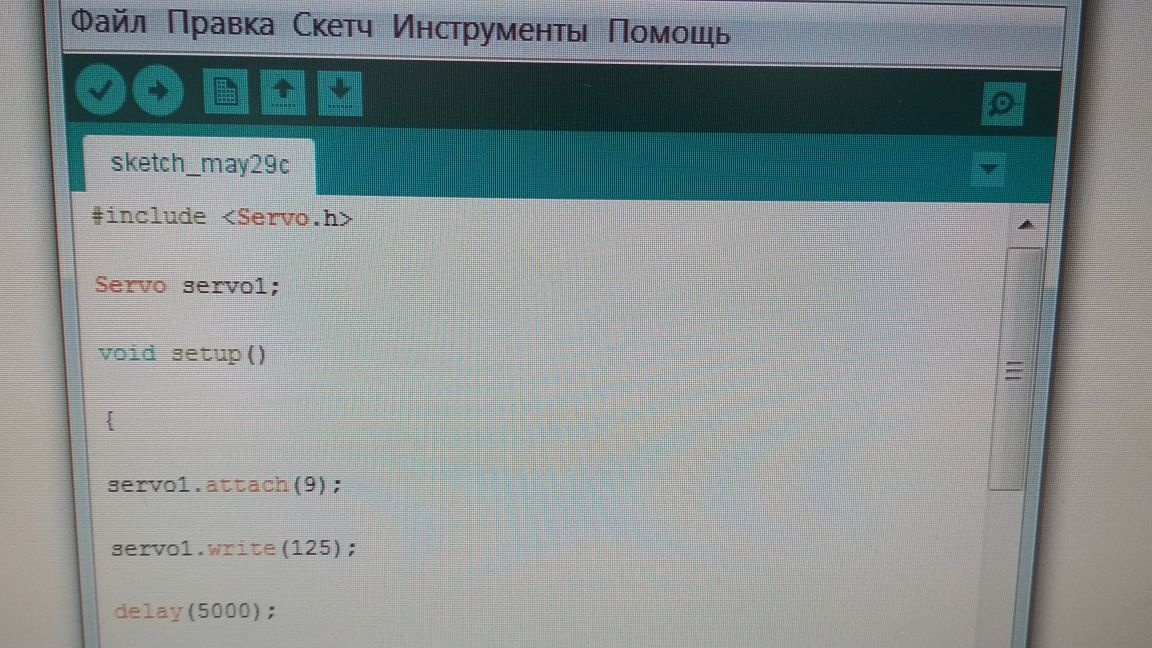
Aquí hay un boceto:
#include
Servo servo1;
configuración nula ()
{
servo1.attach (9);
servo1.write (125);
retraso (5000);
servo1.write (90);
retraso (200);
servo1.write (125);
retraso (750);
}
bucle vacío ()
{
servo1.write (90); // 1
retraso (200);
servo1.write (125);
retraso (600);
}Usando cinta adhesiva o cinta eléctrica, enrollamos el lado pelado de un cable de tipo "madre a madre" con una salida de "madre" cortada al lado positivo de nuestro "lápiz" y enviamos este cable a Gnd en Arduino:
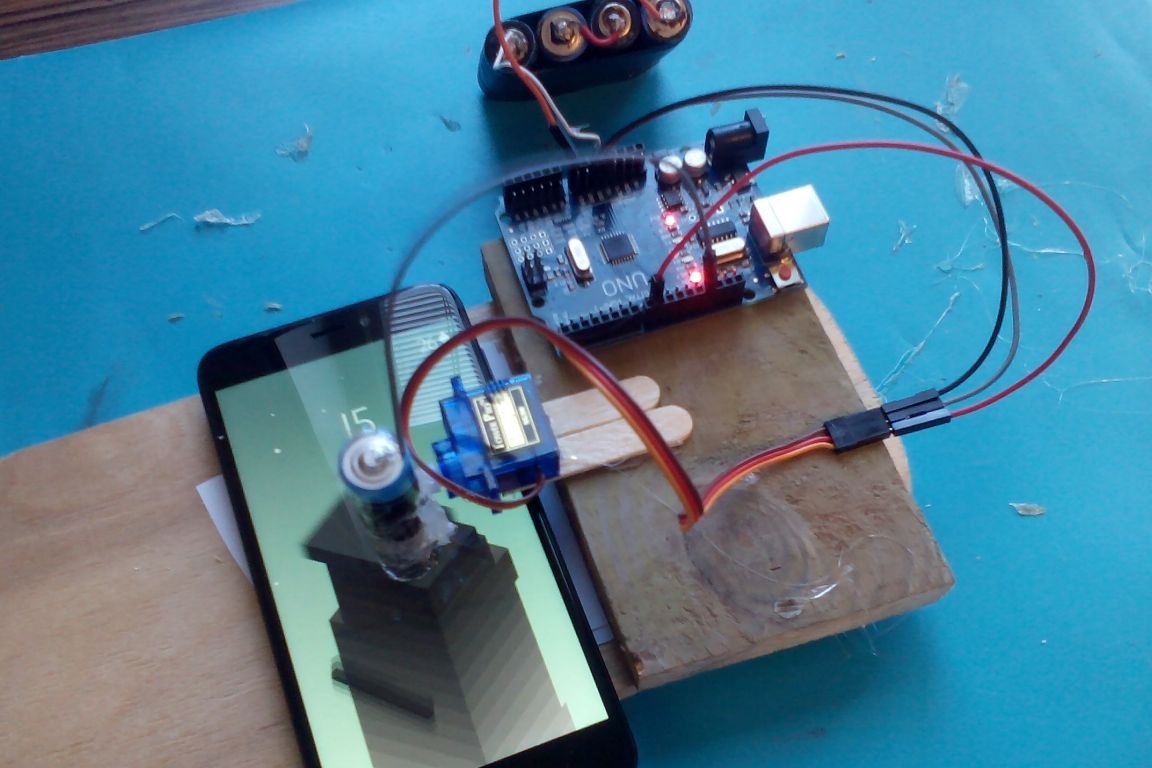
Bueno, eso es todo! Nuestro simple el robot listo y solo queda probarlo! Para hacer esto, coloque el teléfono debajo del lápiz óptico, inicie la aplicación Stak y coloque el teléfono de modo que esté sobre el botón "reproducir", que se indica con una flecha, conectamos la alimentación al arduino con la ayuda de un adaptador especial o enviaremos el plus de nuestra "batería" a Uin en Arduino, y menos a gnd. Después de conectar el poder, nuestro robot inmediatamente comienza a "jugar". Y aunque debido al hecho de que no utilicé un lápiz óptico normal, sino una batería, nuestro robot a menudo no entró en el ritmo y falló, "jugó durante mucho tiempo. Si todo se hace con mucha precisión, generalmente jugará hasta que el teléfono se caiga".

¡Gracias a todos por su atención!