


Buenas tardes, hoy quiero compartir instrucciones para hacer un tanque de juguete controlado por el acelerómetro de un teléfono Android. La base del tanque estará hecha de madera contrachapada de color de 3 mm de espesor. Orugas y motor de doble engranaje de la conocida empresa Tamiya. Produciendo piezas de calidad y de bajo costo.
Para el tanque necesitamos:
- Tamiya 70168 doble engranaje
- Conjunto de rodillos y orugas Tamiya 70100
- Tamiya 70157
- Contrachapado 10 mm (una pieza pequeña)
- Arduino Pro Mini 5V AtMega 328
- DRV 8833
- Módulo Bluetooth HC-06 o equivalente
- USB-UART para firmware Arduino
- LED rectangulares rojos y verdes
- LED blancos de 5 mm 2 piezas.
- Resistencias 3x 150 Ohms
- Baterías Li-ion 18650
- Conectores Dupont papá-mamá
- Alambres de diferentes colores.
- soldadura
- Resina
- soldador
- Pernos 3x40, 3x20, tuercas y arandelas para ellos.
- 2x10 tornillos para madera
- Taladros de madera de 3 mm y 6 mm.
- Sierra de traste eléctrica
- pintura acrílica
Paso 1 Montaje del motorreductor.
Me gusta usar motores de engranajes Tamiya. Se mantienen aceptables, se ensamblan fácilmente. Tamiya 70168 tiene cuatro opciones de construcción. Dependiendo de la relación de transmisión deseada y la posición de los ejes de salida.
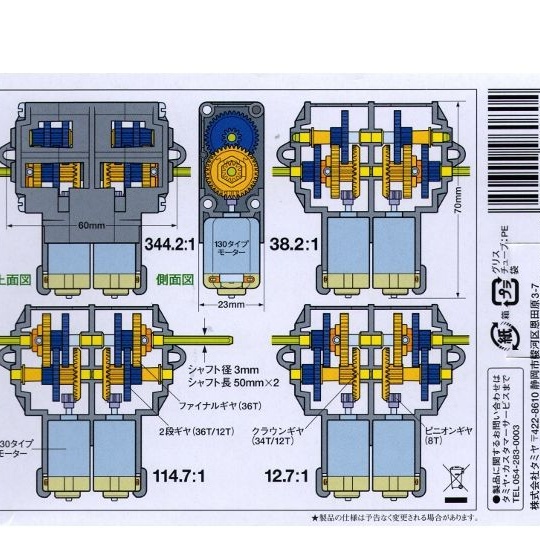
Las instrucciones detalladas se incluyen dentro de la caja de cambios. Necesitamos que los ejes de salida estén más cerca de los motores, y la relación de transmisión 114.7: 1. Seleccionamos la opción que necesitamos y recopilamos todo de acuerdo con las instrucciones, excepto la instalación de motores. Es más conveniente colocar los motores más adelante, además, se deben soldar cables y condensadores antes de la instalación.
Paso 2 Producción de partes del cuerpo.
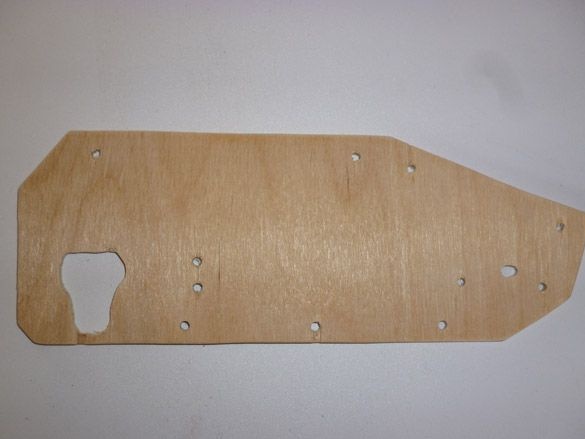
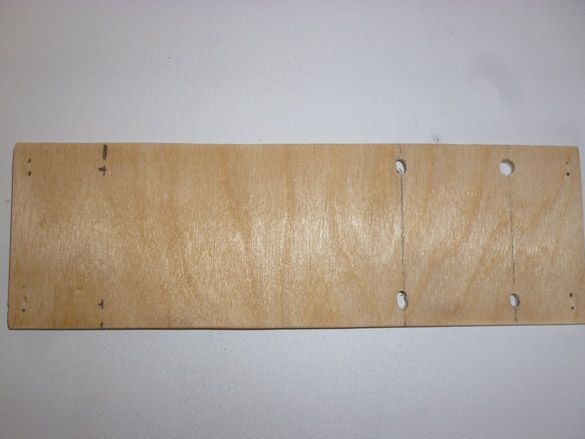
La caja estará hecha de madera contrachapada de 3 mm de espesor. Descargue la siguiente imagen e imprímala en una hoja A4 a una escala del 102%.
Ahora tomamos dos piezas de madera contrachapada de tamaño suficiente, colocamos una sobre la otra, aplicamos nuestra imagen en la parte superior. Se deben hacer agujeros de 3 mm en las áreas marcadas con un punto en negrita. Para que ambas partes sean iguales, primero perforamos una hoja y dos contrachapados en uno de los puntos, insertamos un perno allí y giramos la imagen y dos piezas de contrachapado. Luego el segundo hoyo, y también inserte un tornillo allí. Después de eso, perforamos todo el resto. Presta atención al agujero más a la izquierda, es necesario darle una forma ovalada. Esto es necesario para controlar la tensión de las pistas. Ahora tomamos una sierra de calar e inmediatamente cortamos dos partes laterales de la caja, siguiendo la línea en negrita de la imagen. Deben resultar dos de estos detalles:
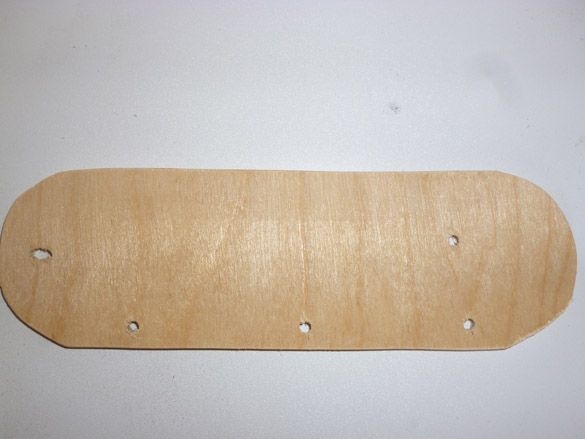
A continuación, debe hacer todo lo anterior, solo que esta vez eliminamos dos detalles que cubren las pistas. Es necesario cortar el pequeño óvalo dibujado en la imagen. Como resultado, obtenemos dos detalles más:
Ahora tomamos una hoja de madera contrachapada en una capa y cortamos un rectángulo con dimensiones de 168 x 54 mm. Este será el fondo de nuestro tanque y la parte a la que está unido el motorreductor:
Para comenzar el ensamblaje, necesitamos todos los detalles descritos anteriormente:

Puedes dejar todos los detalles como están, pero prefiero pintarlos. La pintura acrílica es adecuada para pintar. Se seca rápidamente y no huele, lo que significa que puede pintar en cualquier habitación sin temor a envenenamiento. Entonces, pintamos los detalles recortados:

Ahora necesitamos madera contrachapada de 10 mm o un palo de madera adecuado. Es necesario cortar un rectángulo de 54 x 15 mm y un grosor de 10 mm. Esta parte es necesaria para conectar la carcasa entre sí. Después de hacer un rectángulo, perforamos dos agujeros a una distancia de 15 mm del borde, primero con un taladro de 3 mm y luego con 6 mm, pero no de arriba a abajo, sino solo la mitad de la profundidad. Inserte las tuercas en los agujeros obtenidos y fíjelas con pegamento. Necesitamos cuatro detalles:

Nuevamente tomamos madera contrachapada de 3 mm de espesor. Cortar un rectángulo de 107 x 60 mm. Retirándose a 15 mm de los bordes del taladro de 3 mm, esta será la cubierta superior:

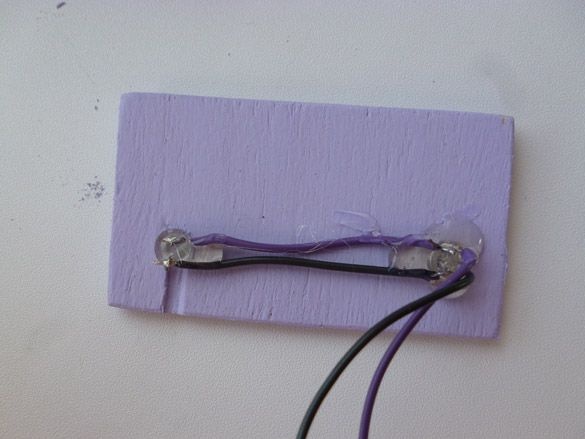
Cortamos el siguiente rectángulo que mide 33 x 60 mm. Retrocediendo 15 mm desde los bordes, perforamos dos agujeros con un diámetro de 5 mm. Cortando y pelando una parte, la pintamos. Luego, insertamos LED blancos de 5 milímetros en los agujeros hechos. Los soldamos en paralelo y los reparamos con adhesivo termofusible:
Paso 3 Montaje de la carcasa.
Una vez preparado el motorreductor y las piezas, procedemos al montaje de todo junto. Para comenzar, tome la parte inferior de la caja y sujete el motorreductor:
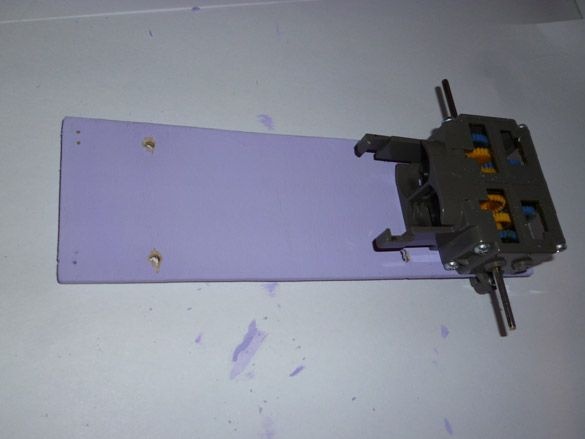
Y un poco más grande:

Luego arreglamos las partes laterales, usando esquinas de un constructor de hierro para niños y pernos de 3x20 mm para esto:

Ahora necesitamos instalar las pistas. Tomamos los detalles de las pistas de cierre. Insertamos pernos de 3x40 mm en los agujeros. Ponemos una rueda grande en el perno delantero, en la parte inferior tres pequeños, luego las arandelas y apretamos las tuercas, pero no apretas, para que todos los rodillos giren libremente. Ponemos grandes piñones en los ejes del motorreductor. Combinamos todos los pernos con rodillos con agujeros en las partes laterales. Después de pasar los tornillos, enrollamos y apretamos las tuercas desde el interior de la caja. Ponemos las pistas, verificamos si están lo suficientemente apretadas. Las orugas no deben ceder, pero demasiada tensión las dañará. El ajuste se realiza mediante la rueda delantera, moviéndola o viceversa, alejándola del motor de engranajes. Después de todas las manipulaciones que obtenemos:

Tomamos los motores que vienen con los rodillos y las orugas. Soldamos a las almohadillas de contacto del cable, y en paralelo con ellas un condensador de 0.1 microfaradios. Después de eso, instale los motores en el motorreductor:

Pasemos a las baterías. Soldamos nuestras baterías Li-ion 18650 en paralelo y sacamos los cables para mayor comodidad. Tuercelos con cinta aislante:

Los colocamos en la parte inferior de la caja, al lado de los motores:

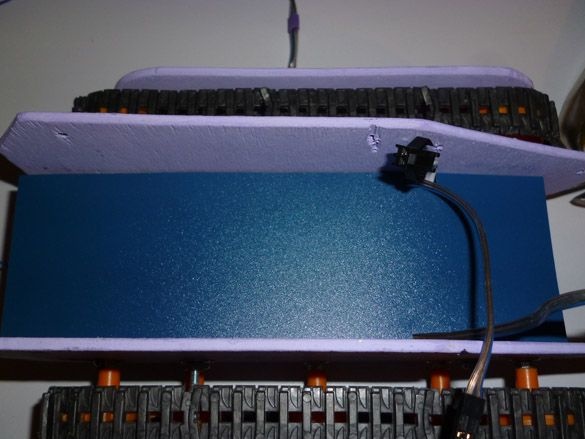
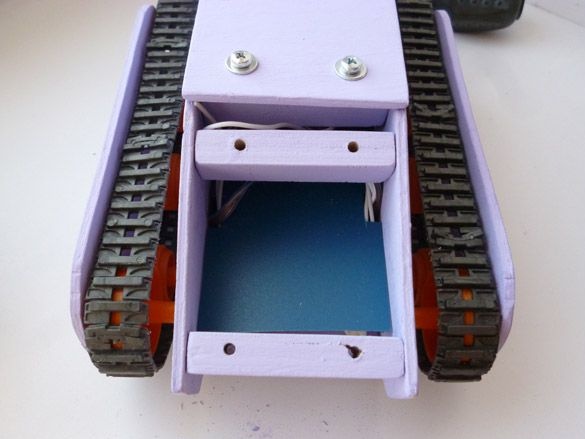
Por conveniencia, así como la separación de elementos mecánicos y e piezas, corte un rectángulo de 100 por 54 mm de plástico delgado o cartón. Colóquelo sobre el motorreductor y las baterías:
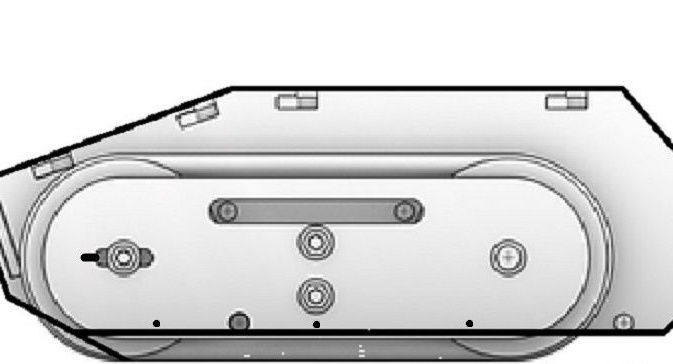
Tomamos sujetadores y los instalamos como se muestra en la foto. Sujetamos a las partes laterales con tornillos:
En la parte posterior del tanque, conectamos LED rectangulares al pegamento caliente. Rojo y verde:

También uso pegamento caliente para fijar la parte delantera con los faros:

Paso 4 electricidad
Los motores eléctricos interfieren con su funcionamiento y se produce una caída de voltaje durante el arranque. Para que en cada arranque de los motores el Arduino no se sobrecargue, dividimos la fuente de alimentación. Arduino funciona con una batería de 9 voltios del tipo corona y motores de baterías. Ya hemos colocado las baterías, colocaremos la corona frente al tanque:

Después de instalar la batería, ciérrela con la cubierta superior:

Conectamos todo de acuerdo con el esquema:

Te explicaré un poco. El motor izquierdo a través del controlador está conectado a los 5 y 6 pines. Derecha - a 9 y 10. Más desde el LED rojo a través de la resistencia a 3 pines, menos a GND. Además del LED verde, también a través de la resistencia, a 4 pines. Faros de 2 pin.
El funcionamiento del módulo Bluetooth se realiza a través de la biblioteca SoftwareSerial.Utilizaremos el software com-port. Los contactos de conexión se pueden cambiar en el boceto. Conectamos el módulo de la siguiente manera:
Arduino Pro Mini - Bluetooth
D7 - RX
D8 - TX
5V - VCC
GND –GND
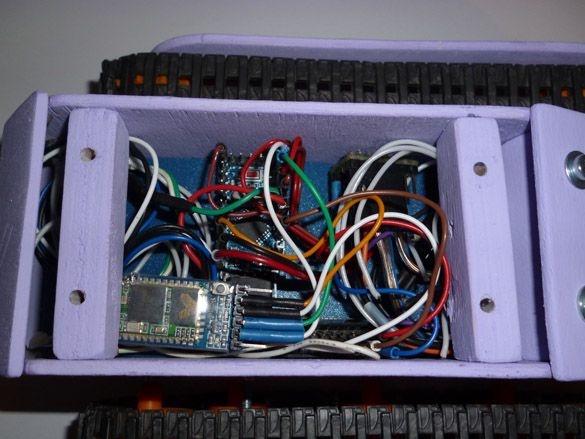
Poniendo todo junto colocamos un electricista en la parte central:
Paso 5 Software.
Para trabajar con el boceto, debe descargar el IDE de Arduino. Seguimos y descargamos la última versión:
Entonces necesitas agregar la biblioteca. SoftwareSerial ya debería estar en el IDE de Arduino. Pero por si acaso, lo publicaré:
Si el IDE de Arduino, al compilar el boceto, produce un error y jura por la biblioteca que falta, desempaquete el archivo descargado en la carpeta "bibliotecas" ubicada en la carpeta con el IDE de Arduino instalado.
Paso 6 Prepare el módulo Bluetooth.
La configuración predeterminada del módulo Bluetooth es diferente de la que necesitamos. Por lo tanto, primero debe establecer la conexión del módulo Bluetooth con la computadora y cambiar la configuración. Rellene el boceto Send_ AT_Bluetooth en el Arduino:
Arduino actuará como un enlace entre Bluetooth y la computadora. Inicie el IDE Arduino, abra el Monitor de puerto. Para HC-06, seleccione 9600 en la configuración del monitor de puerto, NL y CR no son necesarios. Si no se establece una conexión Bluetooth con el módulo, está en modo de entrada de comando AT. Quizás la primera vez que el módulo no responda. Luego intente sobrecargarlo desconectando y volviendo a conectar el cable positivo. Todos los comandos se ingresan sin comillas, no olvide presionar enter para enviar. Ingresamos los siguientes comandos:
"AT": sin comillas, debe aparecer la respuesta "OK".
“AT + NAME
"AT + BAUD7": establezca la velocidad en 57600.
"AT + RESET": sobrecargamos el módulo.
Si algo salió mal o no recuerda la configuración:
“AT + ORGL”: devuelve el módulo a la configuración de fábrica.
Paso 7 Rellene el boceto.
Después de configurar el módulo Bluetooth, proceda a completar el boceto principal:
Paso 8 Prepare su teléfono Android.
Antes de usar, asegúrese de que su teléfono o tableta Android tenga un acelerómetro. Para comenzar, agregue un dispositivo Bluetooth tanchika en Android. Entramos en la configuración de Bluetooth, buscamos el módulo Bluetooth que nombró y nos conectamos. La contraseña para la conexión es "1234" o "0000", puede ser diferente para diferentes modelos. Ahora instale el programa de control. Necesitaremos un Arduino Bluetooth RC Car o BT Controller. Ambos programas son gratuitos, tienen la capacidad de controlar el dispositivo Bkuetooth a través del acelerómetro, y están en Google Play. Descargue el programa que desee en su teléfono o tableta. En el menú de configuración del programa, ingrese los siguientes comandos:
W - adelante
S - espalda
A - izquierda
D - derecha
F o G– parada
K - faros
L - faro apagado
También puede usar el joystick para controlar el tanque. Se puede hacer según mi otro instrucciones.
Y agregue un módulo Bluetooth, siguiendo otro instrucciones.

